Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (7): 2329-2338.doi: 10.12305/j.issn.1001-506X.2025.07.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Low-cost UAV navigation method based on AHRS for GNSS intermittent denial
Siying LIN1,2, Feng YU1,2,*, Zhi XIONG3, Fang WU4, Zijun ZHOU1,2
- 1. School of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Key Laboratory of Space Photoelectric Detection and Perception, Nanjing 211106, China
3. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
4. East-China Institute of Computer Technology, Shanghai 201808, China
-
Received:2024-03-06Online:2025-07-16Published:2025-07-22 -
Contact:Feng YU
CLC Number:
Cite this article
Siying LIN, Feng YU, Zhi XIONG, Fang WU, Zijun ZHOU. Low-cost UAV navigation method based on AHRS for GNSS intermittent denial[J]. Systems Engineering and Electronics, 2025, 47(7): 2329-2338.
share this article
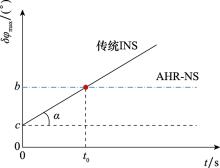
Fig.1
Attitude error curves in denial environment"
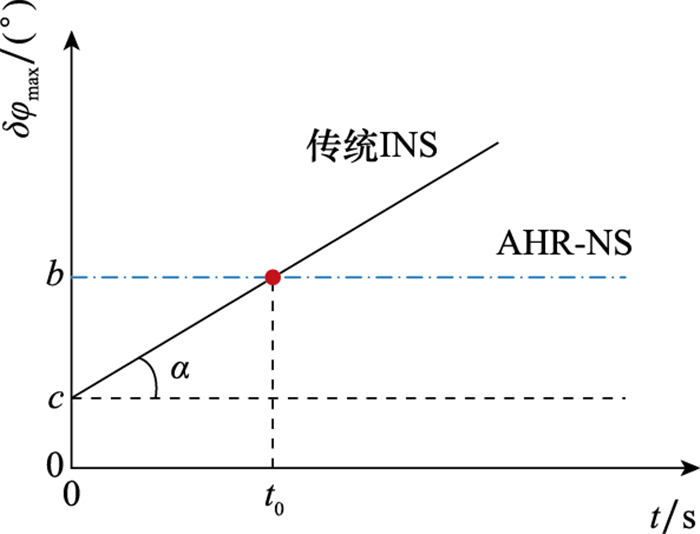
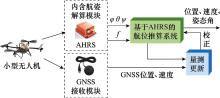
Fig.2
Principle diagram of AHR-NS/GNSS integrated navigation"
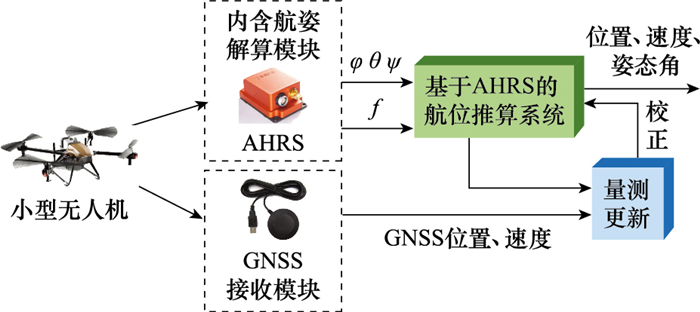
Fig.3
Flight path of unmanned aerial vehicle"
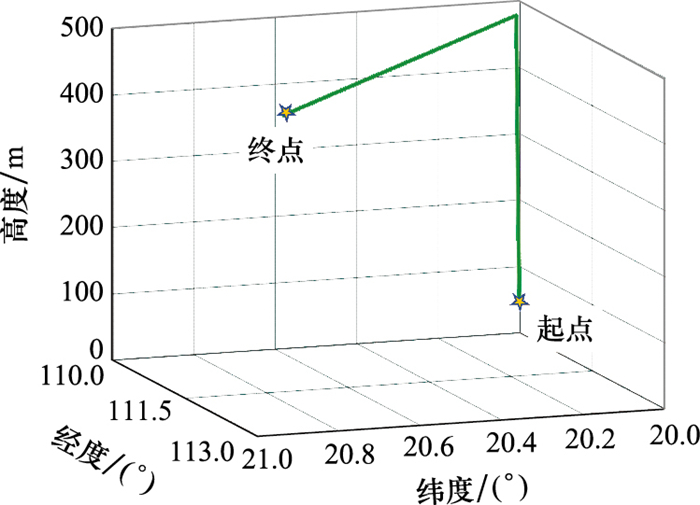
Table 1
Sensor parameters"
| 传感器类型 | 误差项 | 数值 |
| 陀螺仪 | 常值漂移/(°/h) | 3.0 |
| 一阶马尔可夫漂移/(°/h) | 6.0 | |
| 相关时间/s | 1 000 | |
| 噪声密度/(°/s/ | 0.007 | |
| 加速度计 | 一阶马尔可夫漂移/(°/h) | 3.8×10-4 |
| 相关时间/s | 800 | |
| AHRS | 俯仰/滚转均方根/(°) | 0.2 |
| 滚转均方根/(°) | 0.2 | |
| 偏航均方根/(°) | 1.0 |
Fig.4
Attitude angle error before and after correction"
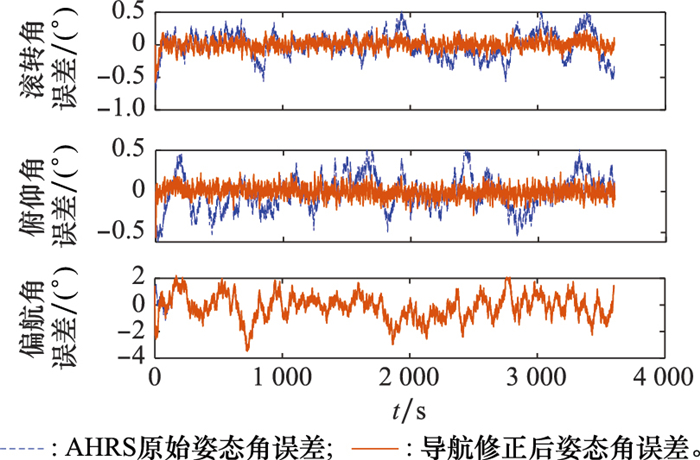
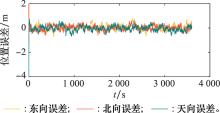
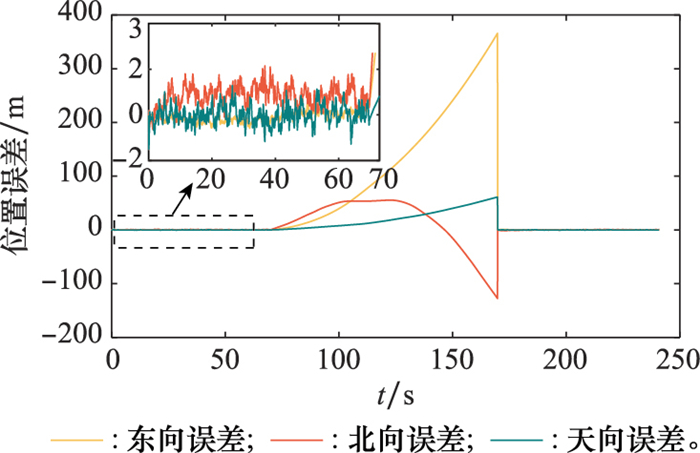
Fig.5
Position error of AHR-NS/GNSS"
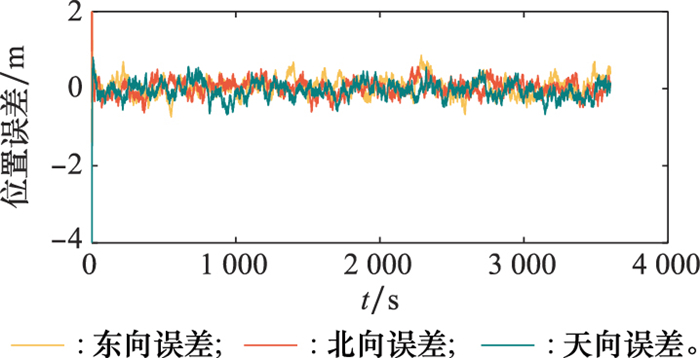
Table 2
Impact of attitude angle estimation on precision"
| 误差项 | 数值 | ||
| X1(12维) | X2(9维) | ||
| 姿态角误差/(°) | 横滚角 | 0.078 2 | 0.201 2 |
| 俯仰角 | 0.076 4 | 0.214 9 | |
| 偏航角 | 0.929 5 | 0.941 2 | |
| 位置误差/m | 东向 | 0.271 1 | 0.287 2 |
| 北向 | 0.278 9 | 0.311 1 | |
| 天向 | 0.268 5 | 0.275 2 | |
| 速度误差/(m/s) | 东向 | 0.034 3 | 0.050 8 |
| 北向 | 0.035 3 | 0.052 0 | |
| 天向 | 0.012 6 | 0.013 8 | |
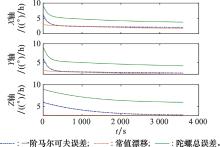
Fig.6
Gyro error after filtering"
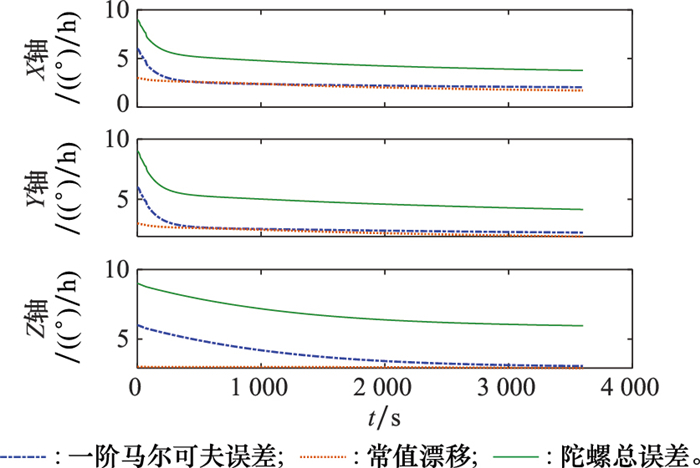
Table 3
Results of INS / GNSS integrated navigation"
| 误差项 | 数值 | |
| 姿态角RMSE/(°) | 横滚 | 0.028 8 |
| 俯仰 | 0.031 6 | |
| 偏航 | 1.066 7 | |
| 位置RMSE/m | 东向 | 0.286 0 |
| 北向 | 0.287 7 | |
| 天向 | 0.280 1 | |
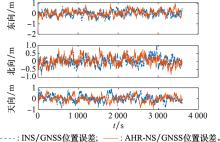
Fig.7
Position error comparison"
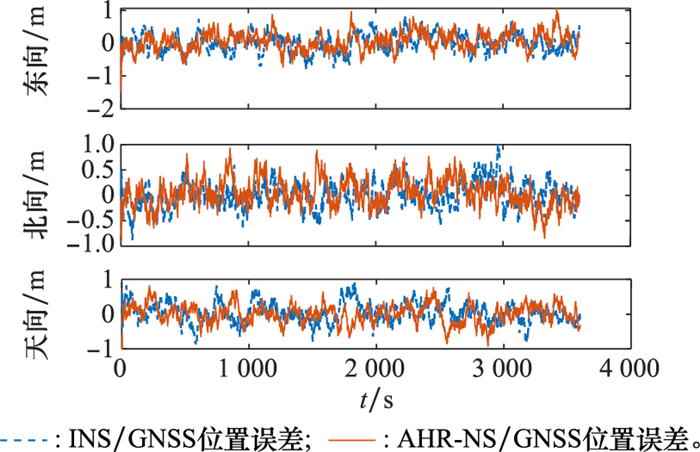
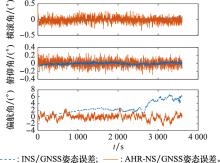
Fig.8
Attitude angle error comparison"
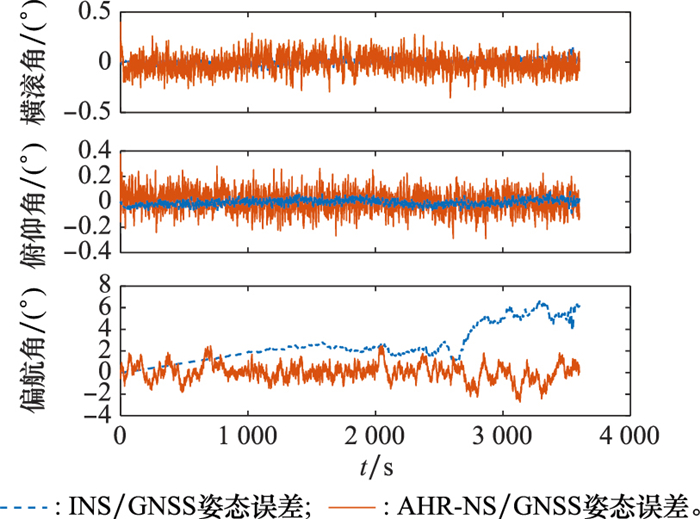
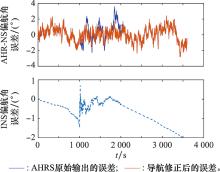
Fig.9
Yaw angle error of AHR-NS and INS"
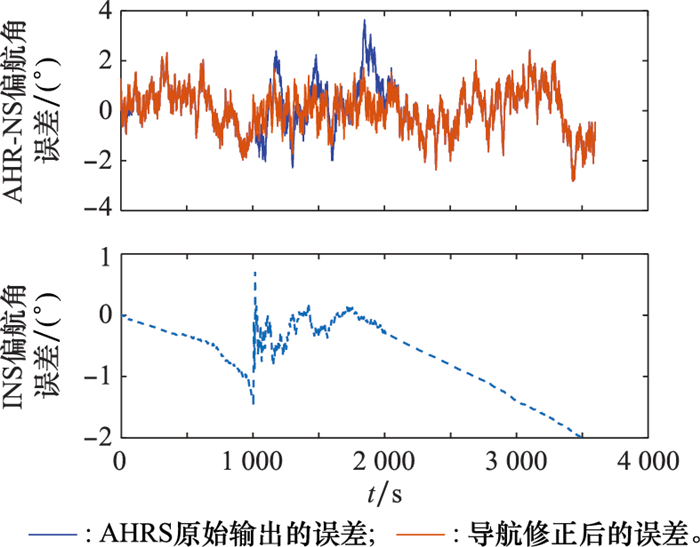
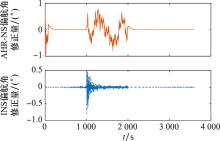
Fig.10
Yaw angle correction value of AHR-NS and INS"
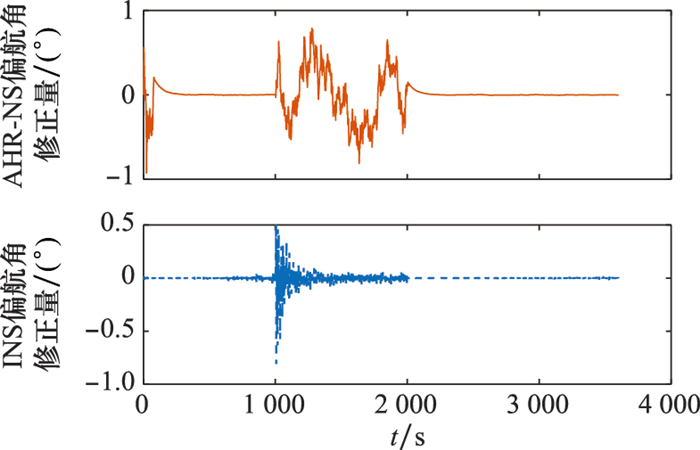
Fig.11
Attitude angle RMSE of 50 simulations"
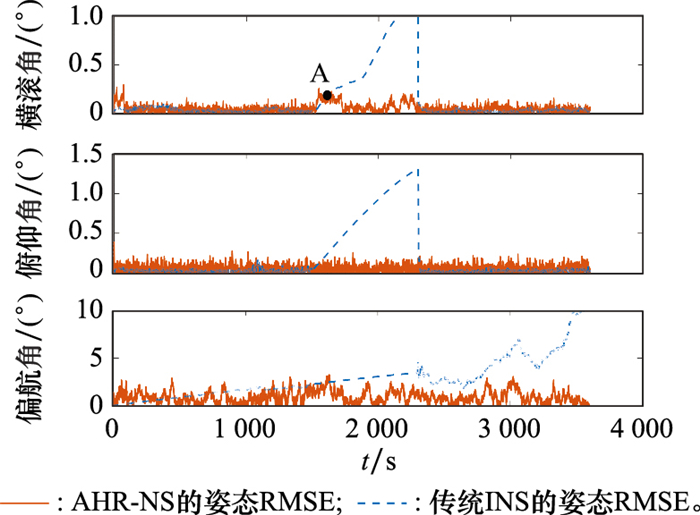
Fig.12
Position RMSE of 50 simulations"
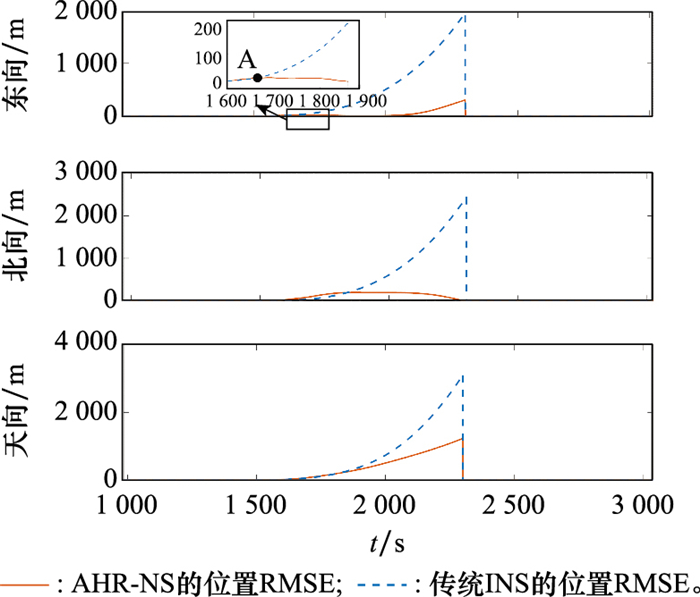
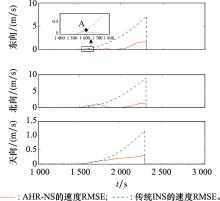
Fig.13
Velocity RMSE of 50 simulations"
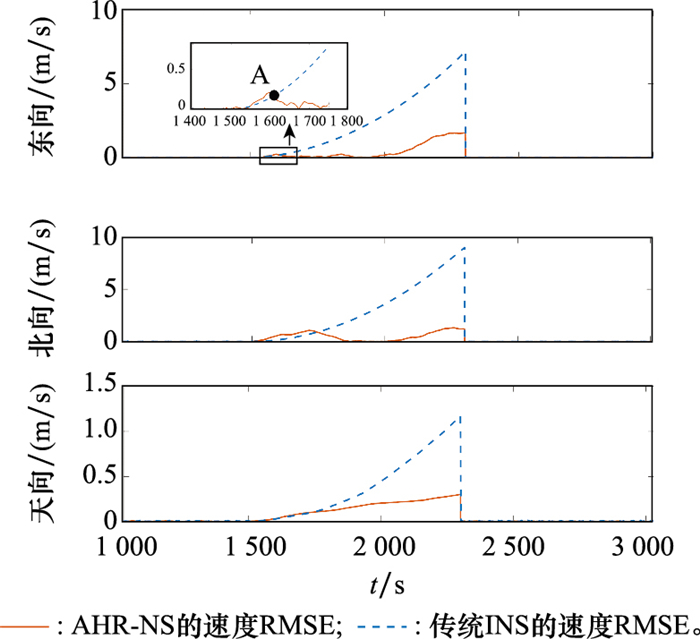

Fig.14
Experimental equipment"
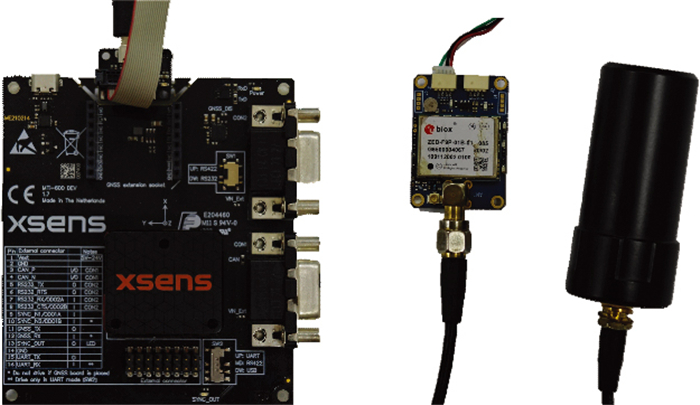

Fig.15
Experimental trajectory"
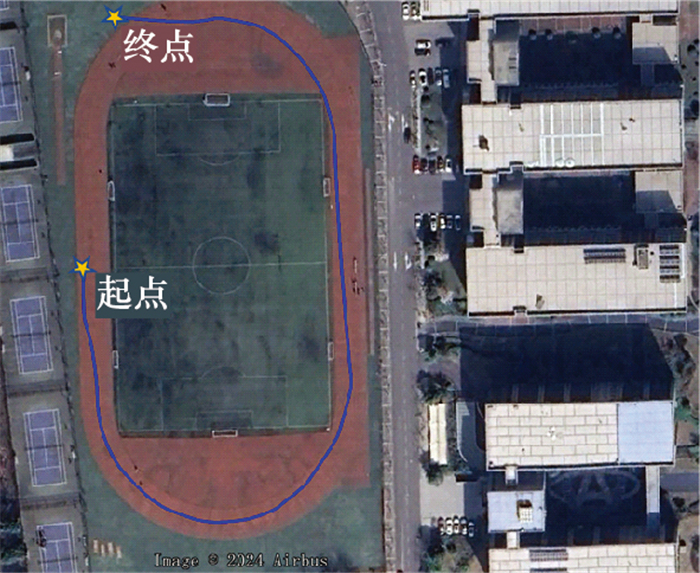
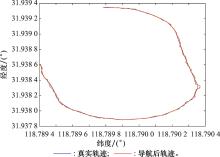
Fig.16
Navigation results"
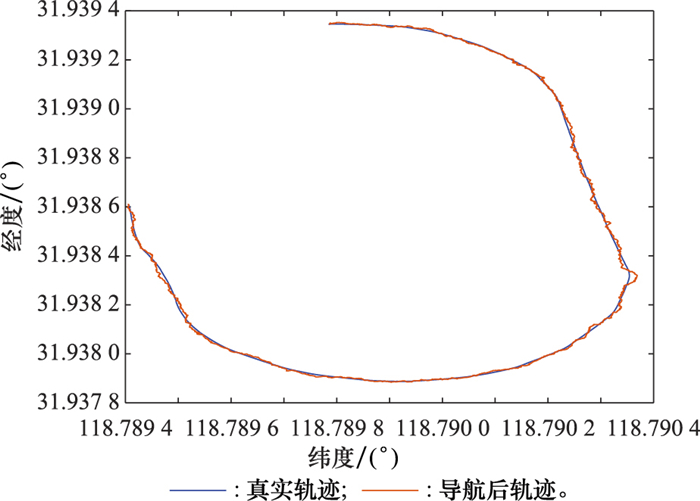
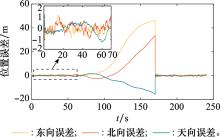
Fig.17
Position error of AHR-NS"
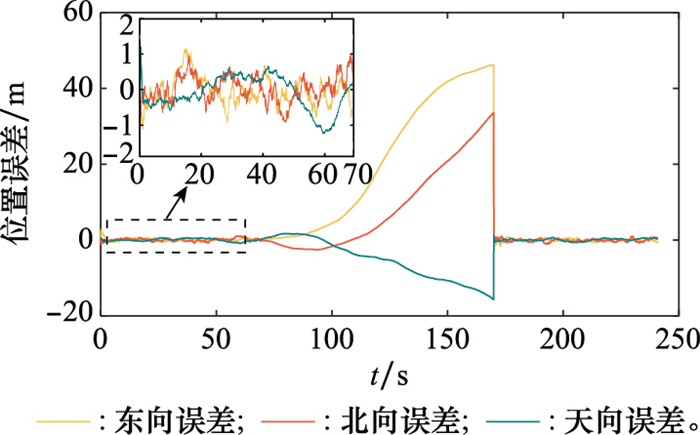
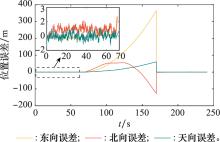
Fig.18
Position error of INS"
| 1 | 王金龙. 基于MEMS与GPS的微小型航姿系统设计与实现[D]. 哈尔滨: 哈尔滨工程大学, 2018. |
| WANG J L. Design and realization of micro attitude heading reference system based on combination of MEMS and GPS[D]. Harbin: Harbin Engineering University, 2018. | |
| 2 | DEBEUNNE C , VIVET D . A review of visual-LiDAR fusion based simultaneous localization and mapping[J]. Sensors, 2020, 20 (7): 2068. |
| 3 |
FRAGOSO A T , LEE C T , MCCOY A S , et al. A seasonally invariant deep transform for visual terrain-relative navigation[J]. Science Robotics, 2021, 6 (55): eabf3320.
doi: 10.1126/scirobotics.abf3320 |
| 4 | SHETTY A , GAO G X . Adaptive covariance estimation of LiDAR-based positioning errors for UAVs[J]. Navigation, 2019, 66 (2): 463- 476. |
| 5 |
付希禹, 孙永荣, 吴玲, 等. 基于BDS/INS紧组合的动对动相对导航算法[J]. 中国惯性技术学报, 2022, 30 (2): 224- 228.
doi: 10.13695/j.cnki.12-1222/o3.2022.02.013 |
|
FU X Y , SUN Y R , WU L , et al. Kinematic-to-kinematic relative navigation algorithm based on BDS/INS tightly coupled[J]. Journal of Chinese Inertial Technology, 2022, 30 (2): 224- 228.
doi: 10.13695/j.cnki.12-1222/o3.2022.02.013 |
|
| 6 | LI Z K , ZAN L , LONG Z . Improved robust Kalman filter for state model errors in GNSS-PPP/MEMS-IMU double state integrated navigation[J]. Advances in Space Research, 2021, 67 (10): 3156- 3168. |
| 7 | RYAN G B , BENJIAMIN E W , ADAM R B . Investigating practical impacts of using single-antenna and dual-antenna GNSS/INS sensors in UAS-LiDAR applications[J]. Sensors, 2021, 21 (16): 5382. |
| 8 | LIU X H , LIU X X , YANG Y , et al. Variational Bayesian-based robust cubature Kalman filter with application on SINS/GPS integrated navigation system[J]. IEEE Sensors Journal, 2022, 22 (1): 489- 500. |
| 9 | FU H P , CHENG Y M . Switching Gaussian-heavy-tailed distribution based robust Gaussian approximate filter for INS/GNSS integration[J]. Journal of the Franklin Institute, 2022, 359 (16): 870- 894. |
| 10 | KINNARI J , VERDOJA F , KYRKI V . Season-invariant GNSS-denied visual localization for UAVs[J]. IEEE Robotics and Automation Letters, 2022, 7 (4): 10232- 10239. |
| 11 | TANENHAUS M, CARHOUN D, GEIS T, et al. Miniature IMU/INS with optimally fused low drift MEMS gyro and accelero-meters for applications in GPS-denied environments[C]//Proc. of the IEEE/ION Position, Location and Navigation Symposium, 2012. |
| 12 | LUTZ P , MULLER M G , MAIER M , et al. ARDEA—an MAV with skills for future planetary missions[J]. Field Robo-tics, 2020, 37 (4): 515- 551. |
| 13 | GRYTE K, BRYNE T H, ALBRESTEN S M, et al. Field test results of GNSS-denied inertial navigation aided by phased-array radio systems for UAVs[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2019: 1398-1406. |
| 14 |
HIGASHI Y , YAMAZAKI K . Autonomous flight using UWB-based positioning system with optical flow sensors in a GPS-denied environment[J]. Journal of Robotics and Mechatronics, 2023, 35 (2): 328- 337.
doi: 10.20965/jrm.2023.p0328 |
| 15 | SHEN H , ZONG Q , LU H C , et al. A distributed approach for lidar-based relative state estimation of multi-UAV in GPS-denied environments[J]. Chinese Journal of Aeronautics, 2022, 35 (1): 59- 69. |
| 16 | YUAN X , SHMAILY Y S , AHN C K , et al. Tightly-coupled integration of INS and UWB using fixed-lag extended UFIR smoothing for quadrotor localization[J]. IEEE Internet of Things Journal, 2021, 8 (3): 1716- 1727. |
| 17 |
盛汉霖, 张天宏, 刘冬冬. 基于扩展卡尔曼滤波器的低成本航姿系统设计[J]. 系统工程与电子技术, 2013, 35 (10): 2158- 2164.
doi: 10.3969/j.issn.1001-506X.2013.10.23 |
|
SHENG H L , ZHANG T H , LIU D D . Low-cost AHRS design based on extended Kalman filter[J]. Systems Engineering and Electronics, 2013, 35 (10): 2158- 2164.
doi: 10.3969/j.issn.1001-506X.2013.10.23 |
|
| 18 | WANG L , LIU M Y , WANG M F , et al. Attitude calculation of AHRS based on geomagnetic field adaptive correction[J]. Journal of Northwestern Polytechnical University, 2019, 37 (2): 225- 231. |
| 19 | LEE J K , JENO T H . Constrained AHRS Kalman filter to reduce magnetic distortion-induced uncertainty in heading estimation[J]. Journal of Institute of Control, 2018, 24 (5): 431- 437. |
| 20 | YOUN W . Magnetic fault-tolerant navigation filter for a UAV[J]. IEEE Sensors Journal, 2020, 20 (22): 13480- 13490. |
| 21 | ZHANG H M , ZHANG H Q , XU G Y , et al. Attitude anti-interference federal filtering algorithm for MEMS-SINS/GPS/magnetometer/SV integrated navigation system[J]. Measurement and Control, 2020, 53 (2): 46- 60. |
| 22 | KULAKOVA V I, MMARKOV A O, SOKHAREV A Y. SINS/ GNSS aided by autonomous AHRS for a small UAV[C]//Proc. of the European Navigation Conference, 2020. |
| 23 | 毛红瑛, 陈至坤. 基于MEMS AHRS/GNSS的全组合导航[J]. 网络安全技术与应用, 2021, 246 (6): 128- 130. |
| MAO H Y , CHEN Z K . Fully integrated navigation based on MEMS AHRS/GNSS[J]. Network Security Technology and Application, 2021, 246 (6): 128- 130. | |
| 24 |
常振军, 张志利, 周召发, 等. 捷联惯导行进间对准位置更新与误差分析[J]. 系统工程与电子技术, 2020, 42 (1): 172- 178.
doi: 10.3969/j.issn.1001-506X.2020.01.23 |
|
CHANG Z J , ZHANG Z L , ZHOU Z F , et al. Position updating and error analysis of SINS alignment for moving base[J]. Systems Engineering and Electronics, 2020, 42 (1): 172- 178.
doi: 10.3969/j.issn.1001-506X.2020.01.23 |
|
| 25 | SABET M S , DANIALI H M , FATHI A , et al. A low-cost dead reckoning navigation system for an AUV using a robust AHRS: design and experimental analysis[J]. IEEE Journal of Oceanic Engineering, 2018, 43 (4): 927- 939. |
| 26 |
顾元鑫, 吴文启, 王茂松. 基于MEMS-IMU的动态大失准角STUKF算法[J]. 中国惯性技术学报, 2023, 31 (9): 861- 869.
doi: 10.13695/j.cnki.12-1222/o3.2023.09.002 |
|
GU Y X , WU W Q , WANG M S . STUKF algorithm for MEMS-IMU with large misalignment in dynamic[J]. Journal of Chinese Inertial Technology, 2023, 31 (9): 861- 869.
doi: 10.13695/j.cnki.12-1222/o3.2023.09.002 |
|
| 27 |
戴礼灿, 刘欣, 张海瀛, 等. 基于卡尔曼滤波算法展开的飞行目标轨迹预测[J]. 系统工程与电子技术, 2023, 45 (6): 1814- 1820.
doi: 10.12305/j.issn.1001-506X.2023.06.25 |
|
DAI L C , LIU X , ZHANG H Y , et al. Flight target track prediction based on Kalman filter algorithm unfolding[J]. Systems Engineering and Electronics, 2023, 45 (6): 1814- 1820.
doi: 10.12305/j.issn.1001-506X.2023.06.25 |
|
| 28 | 帅平, 陈定昌, 江涌. GPS/SINS组合导航系统状态的可观测度分析方法[J]. 宇航学报, 2004, 25 (2): 219- 224. |
| SHUAI P , CHEN D C , JIANG Y . Observability analysis method of GPS/SINS integrated navigation system state[J]. Journal of Astronautics, 2004, 25 (2): 219- 224. | |
| 29 | KAFASH S H , RUTHS J . Relaxation of the greatest common divisor condition for the controllability of bilinear systems[J]. Automatica, 2023, 153, 111048. |
| 30 | 赵耀, 熊智, 田世伟, 等. 基于SAR图像匹配结果可信度评价的INS/SAR自适应Kalman滤波算法[J]. 航空学报, 2019, 40 (8): 216- 227. |
| ZHAO Y , XIONG Z , TIAN S W , et al. INS/SAR adaptive Kalman filtering algorithm based on credibility evaluation of SAR image matching results[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (8): 216- 227. |
| [1] | Dong ZHANG, Fuyi XING, Yunhe XU, Peng QIAN. Airborne inertial navigation system/radar integrated navigation method based on dual-mode switching [J]. Systems Engineering and Electronics, 2024, 46(8): 2770-2778. |
| [2] | Kaidi JIN, Hongzhou CHAI, Chuhan SU. Equivalence analysis between DVL/SINS loosely and tightly coupled systems and improved virtual beam-aided tightly coupled algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2107-2116. |
| [3] | Yue LENG, Sheng ZHONG. Compensation method for gravity disturbance in celestial/inertial integrated system [J]. Systems Engineering and Electronics, 2024, 46(4): 1357-1363. |
| [4] | Xinyu LI, Zhaofa ZHOU, Zhili ZHANG, Shiwen HAO, Zhe LIANG. Deviation of vertical measurement method based on SINS/OD misalignment angle observation [J]. Systems Engineering and Electronics, 2024, 46(3): 1067-1074. |
| [5] | Shoujian ZHANG, Mingzhen GUI. Navigation method using angle/velocity measurement based on GPR-UKF [J]. Systems Engineering and Electronics, 2024, 46(12): 4183-4191. |
| [6] | Hongqiong TANG, Jiangning XU, Wence SHI, Hongyang HE, Fangneng LI. Davenport quaternion DVL calibration method based on position observation information [J]. Systems Engineering and Electronics, 2023, 45(11): 3640-3648. |
| [7] | Tiangao ZHU, Yong LIU, Kailong LI, Renjie ZHAO. Analysis and comparison of Euler angles based-error model based on Lie groups of the strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2023, 45(10): 3265-3273. |
| [8] | Lichun GAO, Mingyang GAO, Xiaofang CHEN, Jianbing RAO, Zesong FEI, Shaojie NI. High precision approach-and-landing navigation technology based on SINS/GBAS integrated navigation [J]. Systems Engineering and Electronics, 2023, 45(1): 210-220. |
| [9] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [10] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [11] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [12] | Zhipeng WU, Ping ZHANG, Zhen LI, Lei HUANG, Chang LIU, Shuo GAO. Vegetation height inversion method based on light-weighted and small UAV-radar [J]. Systems Engineering and Electronics, 2022, 44(12): 3667-3675. |
| [13] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [14] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [15] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||