Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (12): 4183-4191.doi: 10.12305/j.issn.1001-506X.2024.12.27
• Guidance, Navigation and Control • Previous Articles
Navigation method using angle/velocity measurement based on GPR-UKF
Shoujian ZHANG1,2, Mingzhen GUI1,2,*
- 1. School of Automation, Central South University, Changsha 410083, China
2. Key Laboratory of Smart Earth, Beijing 100029, China
-
Received:2024-01-30Online:2024-11-25Published:2024-12-30 -
Contact:Mingzhen GUI
CLC Number:
Cite this article
Shoujian ZHANG, Mingzhen GUI. Navigation method using angle/velocity measurement based on GPR-UKF[J]. Systems Engineering and Electronics, 2024, 46(12): 4183-4191.
share this article

Fig.1
Starlight angle pitch measurement"


Fig.2
Doppler velocity measurement"


Fig.3
Flowchart of detection and modification for outlier"


Fig.4
Comprehensive outliers (including single outliers and continuous outliers)"


Fig.5
Result of traditional navigation (without outliers)"


Fig.6
Results of traditional navigation (with single and continuous outliers)"
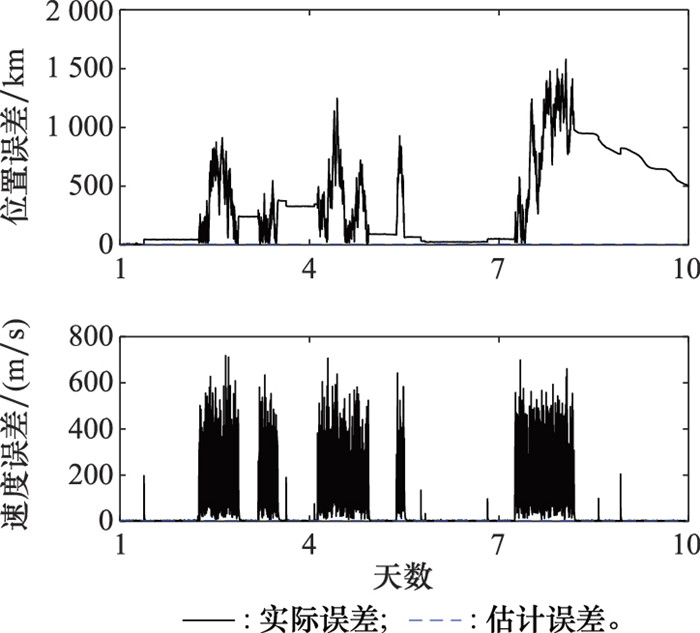
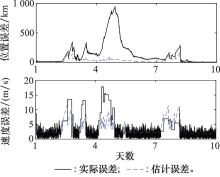
Fig.7
Navigation result of traditional outlier processing methods"

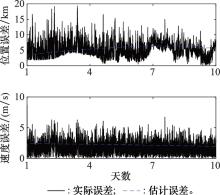
Fig.8
Navigation result of GPR-UKF outlier processing"

Table 1
Comparison of navigation errors of various methods"
| 不同方法 | 导航位置误差均值/km | 导航最大位置误差/km | 导航速度误差均值/(m/s) | 导航最大速度误差/(m/s) |
| 不含野值 | 5.304 0 | 19.187 0 | 1.857 9 | 8.660 0 |
| 含野值不处理 | 362.000 0 | 1 580.200 0 | 63.706 0 | 718.336 6 |
| 传统野值处理 | 146.040 0 | 947.060 0 | 3.849 7 | 17.815 7 |
| GPR野值处理 | 5.807 8 | 19.344 0 | 1.858 1 | 8.660 0 |

Fig.9
Navigation result with initial training sample points of 200"


Fig.10
Navigation result with initial training sample points of 300"


Fig.11
Navigation result with initial training sample points of 400"

Table 2
Comparison of navigation errors with different initial training sample volumes"
| 初始训练样本点数 | 导航位置误差均值/km | 导航最大位置误差/km | 导航速度误差均值/(m/s) | 导航最大速度误差/(m/s) |
| 200 | 11.834 | 75.436 | 1.933 | 8.660 |
| 300 | 11.123 | 30.121 | 1.861 | 8.660 |
| 400 | 6.610 | 19.188 | 1.858 | 8.660 |

Fig.12
Navigation result with dynamic training samples of 200"
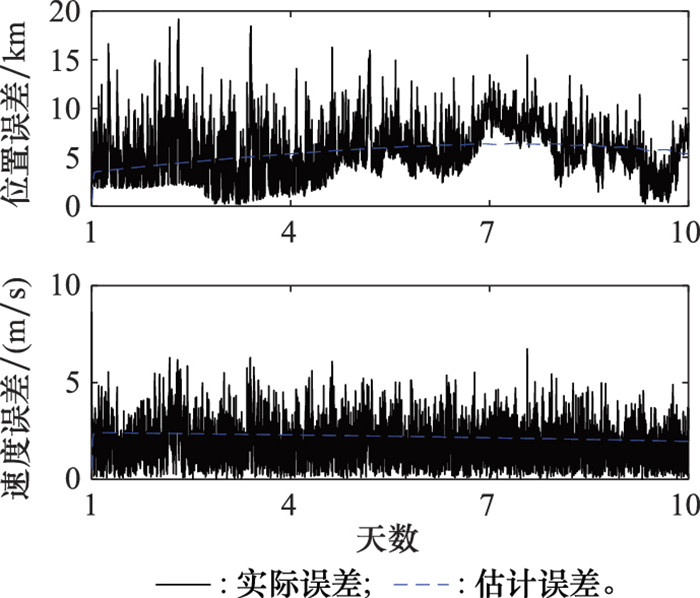

Fig.13
Navigation result with dynamic training samples of 300"


Fig.14
Navigation result with dynamic training samples of 400"

Table 3
Comparison of navigation errors with different dynamic training sample volumes"
| 动态训练样本点数 | 导航位置误差均值/km | 导航最大位置误差/km | 导航速度误差均值/(m/s) | 导航最大速度误差/(m/s) |
| 200 | 5.648 4 | 19.188 | 1.858 1 | 8.660 0 |
| 300 | 6.953 2 | 19.235 | 1.858 5 | 8.660 0 |
| 400 | 7.100 0 | 19.469 | 1.858 5 | 8.660 0 |
| 1 |
FARAHANIFAR M , ASSADIAN N . Integrated magnetometer-horizon sensor low-Earth orbit determination using UKF[J]. Acta Astronautica, 2015, 106, 13- 23.
doi: 10.1016/j.actaastro.2014.10.007 |
| 2 | 宁晓琳, 杨雨青, 房建成, 等. 深空探测器自主天文导航研究进展[J]. 深空探测学报(中英文), 2023, 10 (2): 99- 108. |
| NING X L , YANG Y Q , FANG J C , et al. The progress of autonomous celestial navigation for deep space spacecraft[J]. Journal of Deep Space Exploration, 2023, 10 (2): 99- 108. | |
| 3 | 强祺昌, 林宝军, 刘迎春, 等. 深空探测自主导航技术综述[J]. 导航与控制, 2023, 22 (1): 19- 32. |
| QIANG Q C , LIN B J , LIU Y C , et al. Review of autonomous navigation technology for deep space exploration[J]. Navigation and Control, 2023, 22 (1): 19- 32. | |
| 4 | ZHANG W , YANG Y , YOU W , et al. Autonomous navigation method and technology implementation of high-precision solar spectral velocity measurement[J]. Science China Physics, Mechanics & Astronomy, 2022, 65 (8): 289606. |
| 5 | MITCHELL J W, HASSOUNEH M, WINTERNITZ L, et al. SEXTANT-station explorer for X-ray timing and navigation technology[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2015. |
| 6 | HANSON J E . Principles of X-ray navigation[M]. Palo Alto: Stanford University, 1996. |
| 7 | CHESTER T J, BUTMAN S A. Navigation using X-ray pulsars, NASA technical reports N81-27129[R]. Pasadena: Jet Propulsion Laboratory, 1981. |
| 8 | DOWNS G S. Interplanetary navigation using pulsating radio sources, NASA technical reports N74-34150[R]. Pasadena: Jet Propulsion Laboratory, 1974. |
| 9 |
SHEIKH S I , PINES D J , RAY P S , et al. Spacecraft navigation using X-ray pulsars[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (1): 49- 63.
doi: 10.2514/1.13331 |
| 10 | SHEIKH S I , PINES D J , RAY P S , et al. The use of X-ray pulsars for spacecraft navigation[J]. Advances in the Astronautical Science, 2005, 119 (1): 105- 119. |
| 11 | SHEIKH S I . The use of variable celestial X-ray sources for spacecraft navigation[M]. Baltimore: University of Maryland, 2005. |
| 12 | GENDREAU K C, ARZOUMANIAN Z, OKAJIMA T. The Neutron star interior composition explore R(NICER): an explorer mission of opportunity for soft X-ray timing spectroscopy[C]//Proc. of the X-Ray Binary Systems (BeXRB) Workshop, 2012. |
| 13 | 郑伟, 王禹淞, 姜坤, 等. X射线脉冲星导航方法研究综述[J]. 航空学报, 2023, 44 (3): 527451. |
| ZHENG W , WANG Y S , JIANG K , et al. Overview of X-ray pulsarbased navigation methods[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (3): 527451. | |
| 14 |
LIU J , MA J , TIAN J W , et al. Pulsar navigation for interplanetary missions using CV model and ASUKF[J]. Aerospace Science and Technology, 2012, 22 (1): 19- 23.
doi: 10.1016/j.ast.2011.04.010 |
| 15 | 朱新岩, 史忠科. 基于残差特性分析的野值检测与剔除方法[J]. 飞行力学, 2008, 26 (6): 79- 83. |
| ZHU X Y , SHI Z K . Outlier detection method based on cha-racteristic analyzing of residue[J]. Flight Dynamics, 2008, 26 (6): 79- 83. | |
| 16 |
JULIER S J , UHLMANN J K . Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92 (3): 401- 422.
doi: 10.1109/JPROC.2003.823141 |
| 17 |
NING X L , FANG J C , LIU G , et al. A novel differential Doppler measurement-aided autonomous celestial navigation method for spacecraft during approach phase[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (2): 587- 597.
doi: 10.1109/TAES.2017.2651558 |
| 18 | 黄舒颖. 面向深空探测的太阳光差分测速精度分析及导航光谱选择[D]. 长沙: 湖南大学, 2022. |
| HUANG S Y. Solar difference velocimetry accuracy analysis and navigation spectrum selection for deep space exploration[D]. Changsha: Hunan University, 2022. | |
| 19 |
FANG C , HIEI E , OKAMOTO T . CaⅡ K line asymmetries in two well-observed solar flares of october 18, 1990[J]. Solar Physics, 1991, 135 (1): 89- 97.
doi: 10.1007/BF00146700 |
| 20 |
ICHIMOTO K , KUROKAWA H . Hα red asymmetry of solar flares[J]. Solar Physics, 1984, 93 (1): 105- 121.
doi: 10.1007/BF00156656 |
| 21 |
HUANG S Y , KANG Z W , LIU J , et al. Accuracy analysis of spectral velocimetry for the solar Doppler difference navigation[J]. IEEE Access, 2021, 9, 78075- 78082.
doi: 10.1109/ACCESS.2021.3079500 |
| 22 |
CHEN X , SUN Z W , ZHANG W , et al. A novel autonomous celestial integrated navigation for deep space exploration based on angle and stellar spectra shift velocity measurement[J]. Sensors, 2019, 19 (11): 2555.
doi: 10.3390/s19112555 |
| 23 |
GREC G , FOSSAT E , POMERANTZ M . Solar oscillations: full disk observations from the geographic south pole[J]. Nature, 1980, 288 (5791): 541- 544.
doi: 10.1038/288541a0 |
| 24 | YIM J R. Autonomous spacecraft orbit navigation[D]. Texas: Texas A&M University, 2002. |
| 25 |
YE W , LIU Z C , LI C , et al. Enhanced Kalman filter using noisy input Gaussian process regression for bridging GPS outages in a POS[J]. Journal of Navigation, 2018, 71 (3): 565- 584.
doi: 10.1017/S0373463317000819 |
| 26 |
QUAN W , FANG J C , XU F , et al. Hybrid simulation system study of SINS/CNS integrated navigation[J]. IEEE Aerospace and Electronic Systems Magazine, 2008, 23 (2): 17- 24.
doi: 10.1109/MAES.2008.4460727 |
| 27 |
MA X , NING X L , FANG J C . Analysis of orbital dynamic equation in navigation for a Mars gravity-assist mission[J]. Journal of Navigation, 2012, 65 (3): 531- 548.
doi: 10.1017/S0373463312000100 |
| 28 |
NING X L , LI Z , YANG Y Q , et al. Analysis of ephemeris errors in autonomous celestial navigation during Mars approach phase[J]. Journal of Navigation, 2017, 70 (3): 505- 526.
doi: 10.1017/S0373463316000734 |
| 29 | YIM J R, CRASSIDIS J L, JUNKINS J L. Autonomous orbit navigation of interplanetary spacecraft[C]//Proc. of the AIAA/AAS Astrodynamics Specialist Conference, 2000. |
| 30 | 荆蕾, 孙炜玮, 乔玉新, 等. GNSS/SINS组合导航系统的自适应UKF算法[J]. 大地测量与地球动力学, 2023, 43 (3): 255- 258. |
| JING L , SUN W W , QIAO Y X , et al. Adaptive UKF algorithm for GNSS/SINS integrated navigation system[J]. Journal of Geodesy and Geodynamics, 2023, 43 (3): 255- 258. |
| [1] | Xuehao LIU, Wenxue LIU, Chaosan YANG, Wenjing ZHU, Yu SONG, Jinhai LI. Optimization method of user quantity prediction based on GPR model [J]. Systems Engineering and Electronics, 2024, 46(8): 2721-2729. |
| [2] | Dong ZHANG, Fuyi XING, Yunhe XU, Peng QIAN. Airborne inertial navigation system/radar integrated navigation method based on dual-mode switching [J]. Systems Engineering and Electronics, 2024, 46(8): 2770-2778. |
| [3] | Kaidi JIN, Hongzhou CHAI, Chuhan SU. Equivalence analysis between DVL/SINS loosely and tightly coupled systems and improved virtual beam-aided tightly coupled algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2107-2116. |
| [4] | Yue LENG, Sheng ZHONG. Compensation method for gravity disturbance in celestial/inertial integrated system [J]. Systems Engineering and Electronics, 2024, 46(4): 1357-1363. |
| [5] | Xinyu LI, Zhaofa ZHOU, Zhili ZHANG, Shiwen HAO, Zhe LIANG. Deviation of vertical measurement method based on SINS/OD misalignment angle observation [J]. Systems Engineering and Electronics, 2024, 46(3): 1067-1074. |
| [6] | Hongqiong TANG, Jiangning XU, Wence SHI, Hongyang HE, Fangneng LI. Davenport quaternion DVL calibration method based on position observation information [J]. Systems Engineering and Electronics, 2023, 45(11): 3640-3648. |
| [7] | Tiangao ZHU, Yong LIU, Kailong LI, Renjie ZHAO. Analysis and comparison of Euler angles based-error model based on Lie groups of the strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2023, 45(10): 3265-3273. |
| [8] | Lichun GAO, Mingyang GAO, Xiaofang CHEN, Jianbing RAO, Zesong FEI, Shaojie NI. High precision approach-and-landing navigation technology based on SINS/GBAS integrated navigation [J]. Systems Engineering and Electronics, 2023, 45(1): 210-220. |
| [9] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [10] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [11] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [12] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [13] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [14] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [15] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||