Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (11): 3640-3648.doi: 10.12305/j.issn.1001-506X.2023.11.32
• Guidance, Navigation and Control • Previous Articles Next Articles
Davenport quaternion DVL calibration method based on position observation information
Hongqiong TANG1, Jiangning XU1, Wence SHI1,2, Hongyang HE1, Fangneng LI1,*
- 1. College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China
2. Unit 91321 of the PLA, Jinhua 322000, China
-
Received:2022-09-30Online:2023-10-25Published:2023-10-31 -
Contact:Fangneng LI
CLC Number:
Cite this article
Hongqiong TANG, Jiangning XU, Wence SHI, Hongyang HE, Fangneng LI. Davenport quaternion DVL calibration method based on position observation information[J]. Systems Engineering and Electronics, 2023, 45(11): 3640-3648.
share this article

Fig.1
Installation error diagram of DVL"
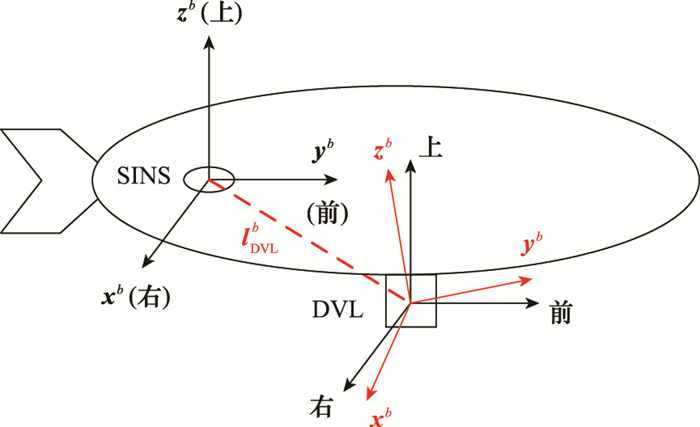
Fig.2
DVL calibration system structure diagram"
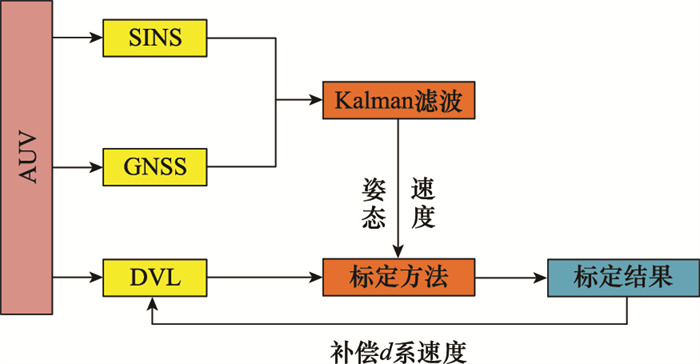
Table 1
Specifications of the CY-JG90J SINS"
| 参数 | 陀螺仪 | 加速度计 |
| 测量范围 | ±400(°)/s | ±50 g |
| 零偏稳定性 | <0.003(°)/h | <20 μg |
| 随机游走系数 | <0.000 3(°)/h | <5 μg |
| 标度因子重复性/ppm | <2 | <15 |
| 更新频率/Hz | 200 | 200 |
Table 2
Specifications of the PA600 DVL"
| 参数 | 数值 |
| 测量范围/kn | ±12 |
| 长期测量精度/(cm/s) | 0.3%±0.3 |
| 工作频率/kHz | 600 |
| 波束数量 | 4波束相控阵 |
| 最大量测深度/m | 80 |
| 更新频率/Hz | 1 |
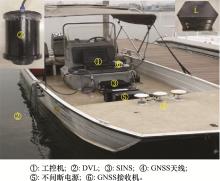
Fig.3
Overview of test platform"
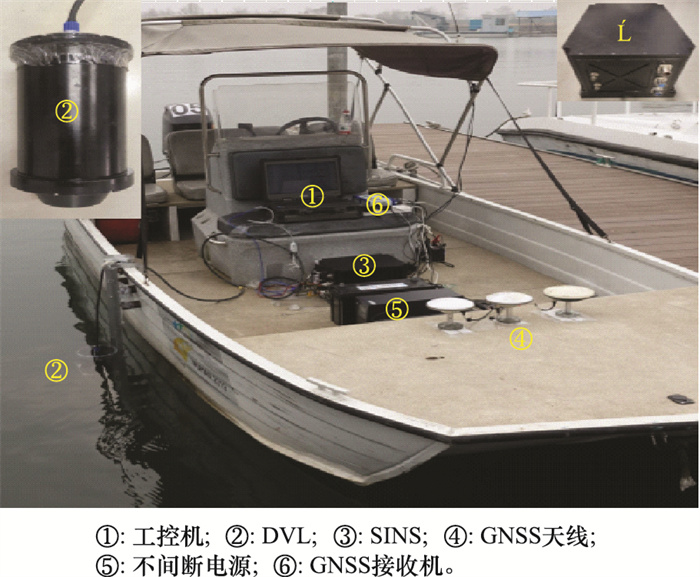
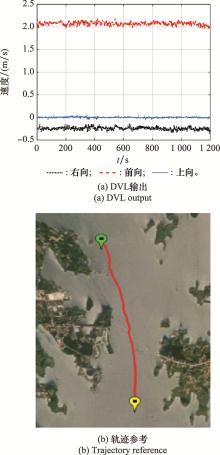
Fig.4
Origin output of DVL and corresponding trajectory in simple maneuvering"
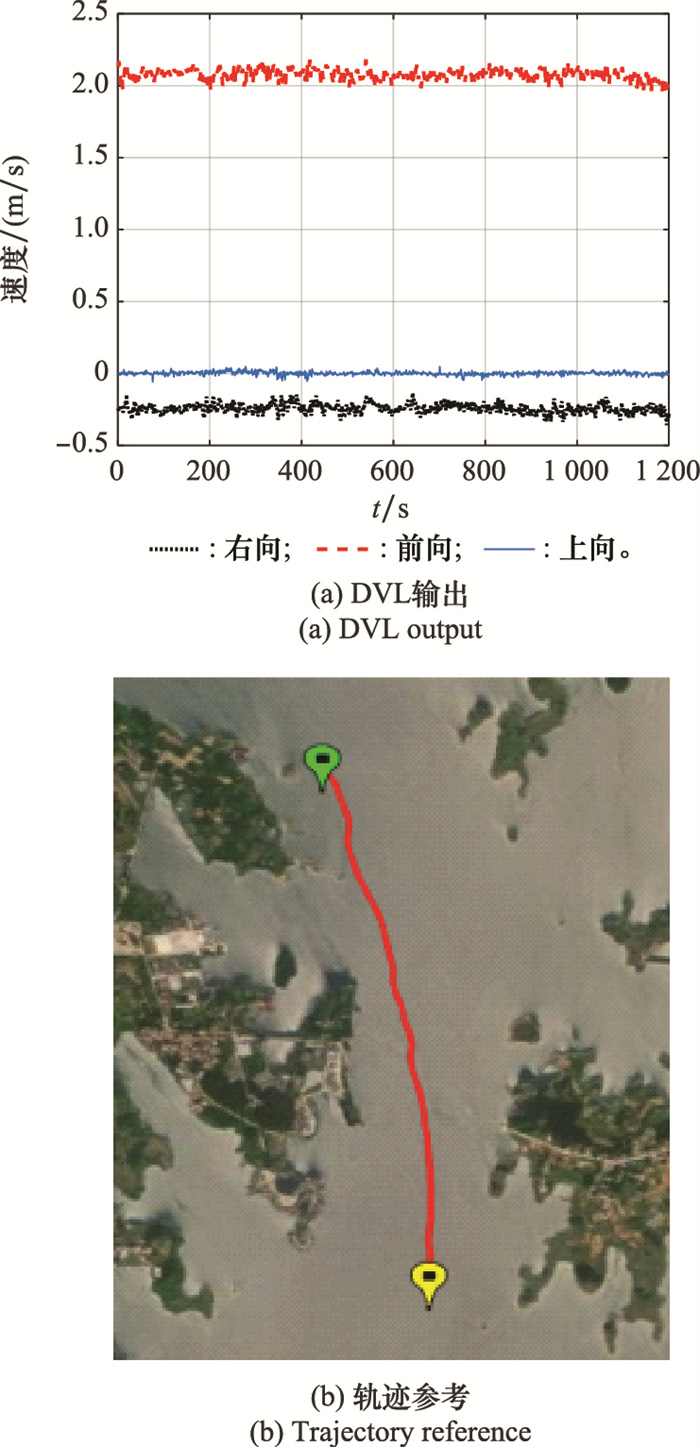

Fig.5
Origin output of DVL and corresponding trajectory in complex maneuvering"
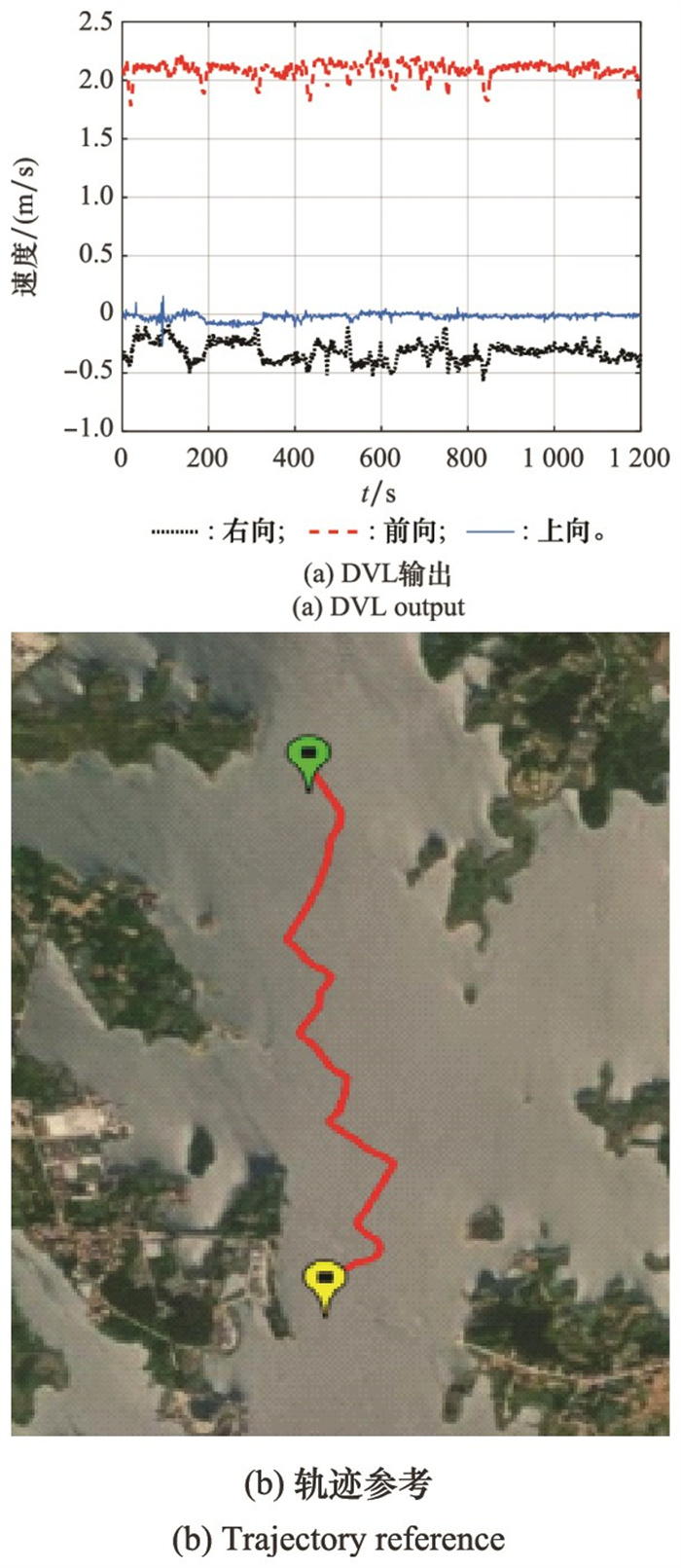
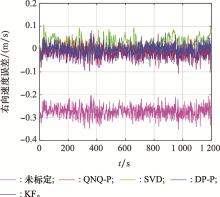
Fig.6
Rightward velocity calibration error in simple maneuvering"
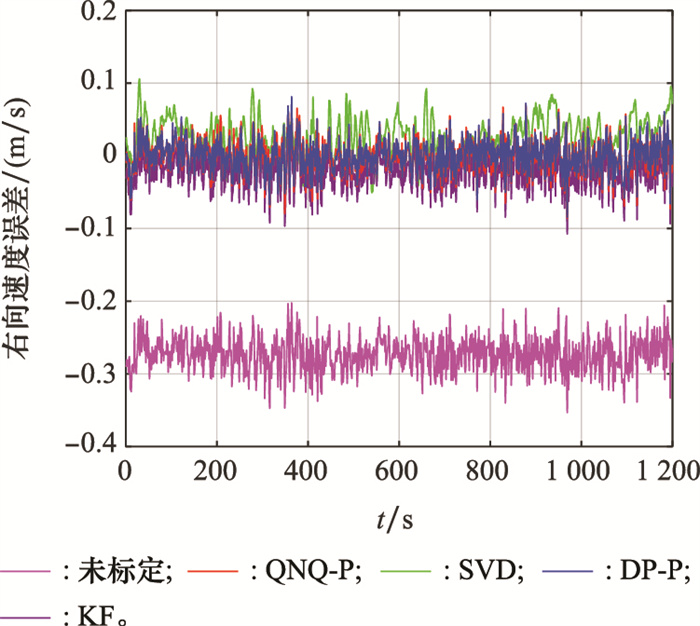
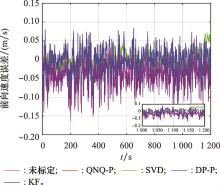
Fig.7
Forward velocity calibration error in simple maneuvering"
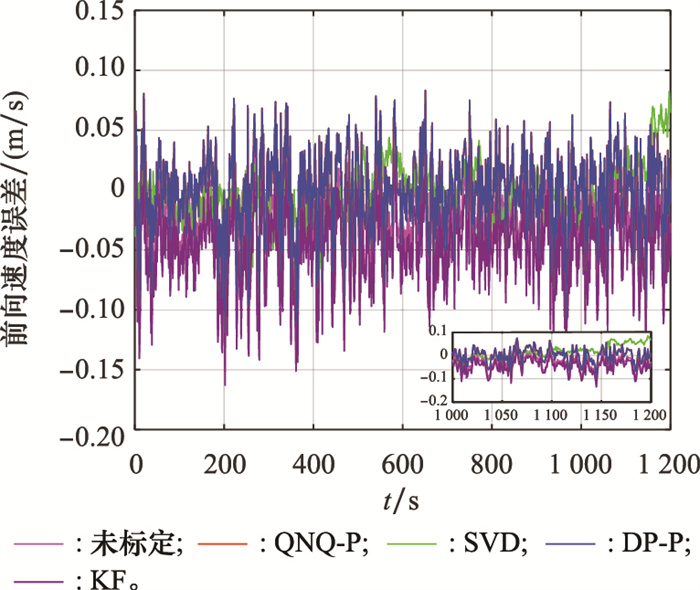
Fig.8
Upward velocity calibration error in simple maneuvering"
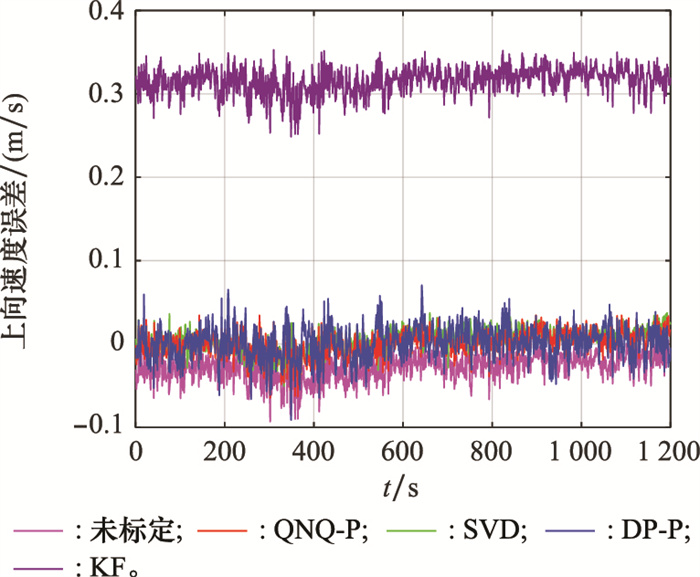
Table 3
Velocity error calibration results of different calibration methods in simple maneuvering m/s"
| 方法 | 右向速度误差 | 前向速度误差 | 上向速度误差 | |||||
| MAX | MAE | MAX | MAE | MAX | MAE | |||
| 未标定 | 0.353 | 0.207 | 0.151 | 0.037 | 0.093 | 0.021 | ||
| SVD | 0.106 | 0.028 | 0.083 | 0.017 | 0.051 | 0.012 | ||
| KF | 0.108 | 0.019 | 0.163 | 0.048 | 0.353 | 0.316 | ||
| QNQ-P | 0.086 | 0.016 | 0.119 | 0.025 | 0.065 | 0.012 | ||
| DP-P | 0.085 | 0.015 | 0.118 | 0.025 | 0.091 | 0.015 | ||
Fig.9
Comparison of test carrier trajectory in simple maneuvering"
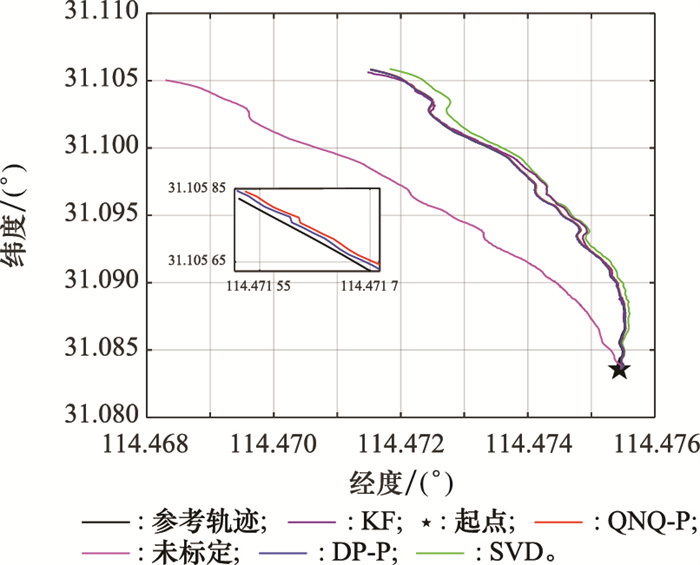
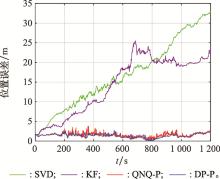
Fig.10
Comparison of position error in simple maneuvering"
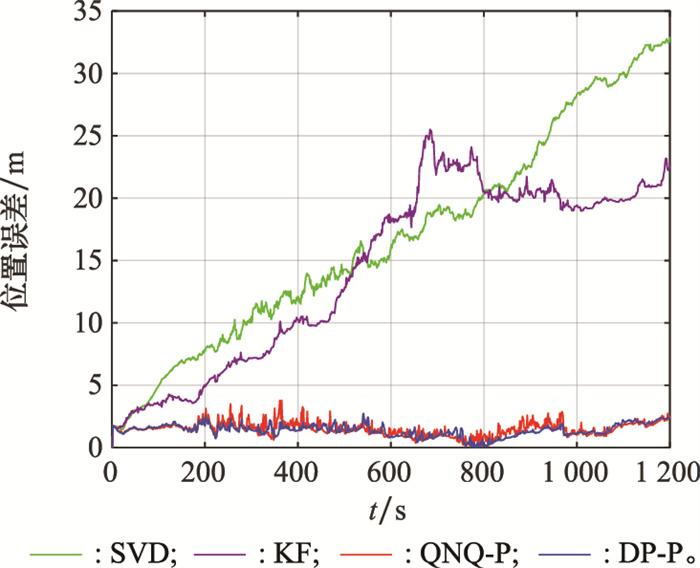
Table 4
Maximum and average values of position error in simple maneuvering m"
| 方法 | MAX | MEAN |
| 未标定 | 352.16 | 176.41 |
| SVD | 32.92 | 16.89 |
| KF | 25.51 | 14.35 |
| QNQ-P | 3.77 | 1.50 |
| DP-P | 2.74 | 1.39 |
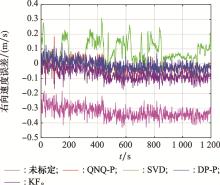
Fig.11
Rightward velocity calibration error in complex maneuvering"
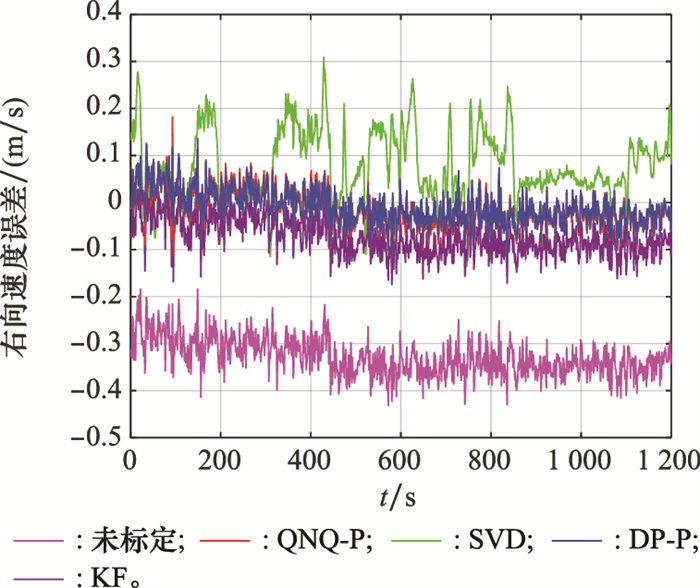
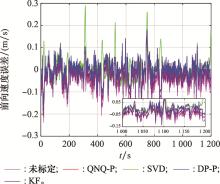
Fig.12
Forward velocity calibration error in complex maneuvering"

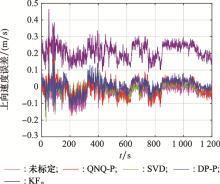
Fig.13
Upward velocity calibration error in complex maneuvering"
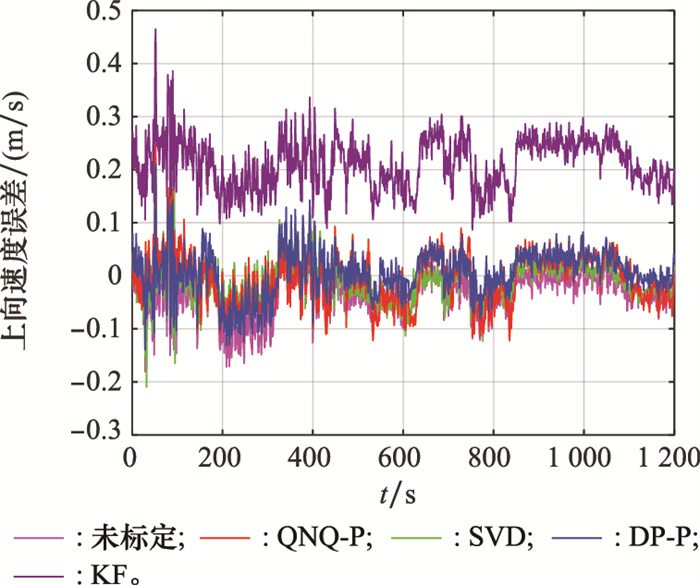
Table 5
Velocity error calibration results of different calibration methods in complex maneuvering m/s"
| 方法 | 右向速度误差 | 前向速度误差 | 上向速度误差 | |||||
| MAX | MAE | MAX | MAE | MAX | MAE | |||
| 未标定 | 0.432 | 0.254 | 0.238 | 0.052 | 0.181 | 0.026 | ||
| SVD | 0.309 | 0.040 | 0.290 | 0.033 | 0.210 | 0.028 | ||
| KF | 0.175 | 0.053 | 0.215 | 0.042 | 0.465 | 0.195 | ||
| QNQ-P | 0.182 | 0.031 | 0.188 | 0.033 | 0.247 | 0.024 | ||
| DP-P | 0.137 | 0.029 | 0.187 | 0.033 | 0.211 | 0.024 | ||
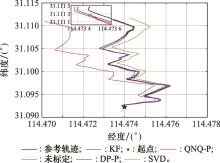
Fig.14
Comparison of test carrier trajectory in complex maneuvering"
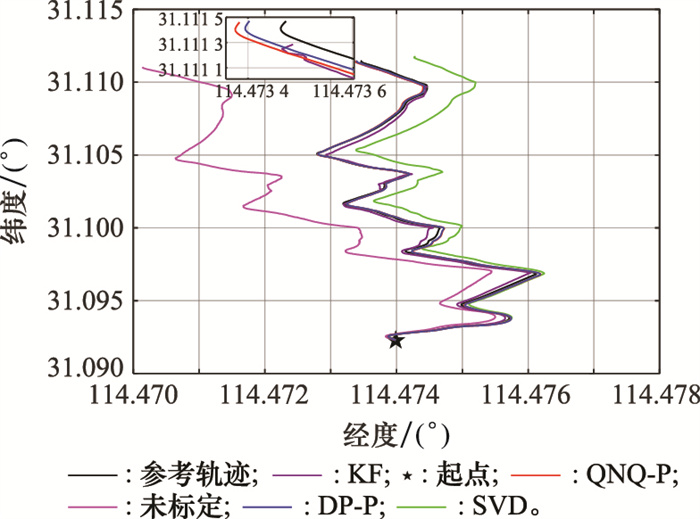
Fig.15
Comparison of position error in complex maneuvering"
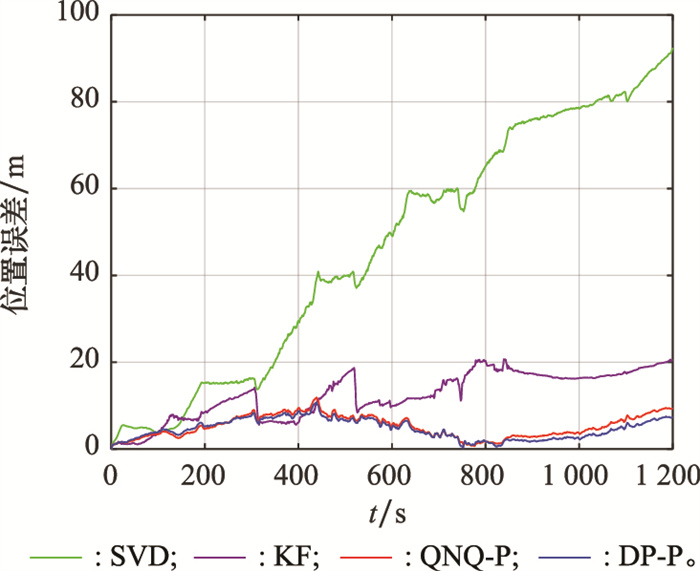
Table 6
Maximum and average values of position error in complex maneuvering m"
| 方法 | 最大值 | 平均值 |
| 未标定 | 356.58 | 160.94 |
| SVD | 92.41 | 46.71 |
| KF | 20.71 | 12.48 |
| QNQ-P | 11.84 | 5.22 |
| DP-P | 10.72 | 4.65 |
| 1 | 高永琪, 马威强, 张林森, 等. 分布式多AUV协同搜索方法[J]. 系统工程与电子技术, 2022, 44 (5): 1670- 1676. |
| GAO Y Q , MA W Q , ZHANG L S , et al. Distributed multi-AUVs cooperative search method[J]. Systems Engineerine and Electronics, 2022, 44 (5): 1670- 1676. | |
| 2 |
SONG S S , LIU J , GUO J N , et al. Neural-network-based AUV navigation for fast-changing environments[J]. IEEE Internet of Things Journal, 2020, 7 (10): 9773- 9783.
doi: 10.1109/JIOT.2020.2988313 |
| 3 |
ZHANG X , HE B , GAO S , et al. Multiple model AUV navigation methodology with adaptivity and robustness[J]. Ocean Engineering, 2022, 254, 111258.
doi: 10.1016/j.oceaneng.2022.111258 |
| 4 |
许江宁. 浅析水下PNT体系及其关键技术[J]. 导航定位与授时, 2017, 4 (1): 1- 6.
doi: 10.19306/j.cnki.2095-8110.2017.01.001 |
|
XU J N . Analysis on underwater PNT system and key technologies[J]. Navigation Positiong and Timing, 2017, 4 (1): 1- 6.
doi: 10.19306/j.cnki.2095-8110.2017.01.001 |
|
| 5 | 吕旭, 胡柏青, 戴永彬, 等. 基于PSO的USQUE在组合导航姿态估计中的应用[J]. 系统工程与电子技术, 2020, 42 (6): 1366- 1371. |
| LYU X , HU B Q , DAI Y B , et al. Application of USQUE based on PSO in attitude[J]. Systems Engineering and Electronics, 2020, 42 (6): 21366- 1371. | |
| 6 | YAO Y Q , XU X S , YANG D R , et al. An IMM-UKF aided SINS/USBL calibration solution for underwater vehicles[J]. IEEE Trans.on Vehicular Technology, 2022, 69 (4): 3740- 3747. |
| 7 |
SHI W C , XU J N , LI D , et al. Attitude estimation of SINS on underwater dynamic base with variational Bayesian robust adaptive Kalman filter[J]. IEEE Sensors Journal, 2022, 22 (11): 10954- 10964.
doi: 10.1109/JSEN.2022.3168537 |
| 8 |
ZHU J P , LI A , QIN F J , et al. A novel hybrid method based on deep learning for an integrated navigation system during DVL signal failure[J]. Electronics, 2022, 11 (19): 2980.
doi: 10.3390/electronics11192980 |
| 9 |
ZHU T G , LIU Y , LI W K , et al. The quaternion based attitude error for the nonlinear error model of the INS[J]. IEEE Sensors Journal, 2021, 21 (22): 25782- 25795.
doi: 10.1109/JSEN.2021.3118039 |
| 10 |
SHI W C , XU J N , HE H Y , et al. Fault-tolerant SINS/HSB/DVL underwater integrated navigation system based on variational bayesian robust adaptive Kalman filter and adaptive information sharing factor[J]. Measurement, 2022, 196, 111225.
doi: 10.1016/j.measurement.2022.111225 |
| 11 |
ZHU J P , LI A , QIN F J , et al. A new robust adaptive filter aided by machine learning method for SINS/DVL integrated navigation system[J]. Sensors, 2022, 22 (10): 3792.
doi: 10.3390/s22103792 |
| 12 |
YAO Y Q , XU X S , LI Y , et al. A hybrid IMM based INS/DVL integration solution for underwater vehicles[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (6): 5459- 5470.
doi: 10.1109/TVT.2019.2910397 |
| 13 |
ZHANG Q , HU Y Q , LI S S , et al. Mounting parameter estimation from velocity vector observations for land vehicle navigation[J]. IEEE Trans.on Industrial Electronics, 2022, 69 (4): 4234- 4244.
doi: 10.1109/TIE.2021.3075883 |
| 14 |
KINSEY J C , WHITCOMB L L . In situ alignment calibration of attitude and Doppler sensors for precision underwater vehicle navigation: theory and experiment[J]. IEEE Journal of Oceanic Engineering, 2007, 32 (2): 286- 299.
doi: 10.1109/JOE.2007.893686 |
| 15 |
XU B , GUO Y . A novel DVL calibration method based on robust invariant extended Kalman filter[J]. IEEE Trans.on Vehicular Technology, 2022, 71 (9): 9422- 9434.
doi: 10.1109/TVT.2022.3182017 |
| 16 |
CHANG L B , LI Y , XUE B Y . Initial alignment for Doppler velocity log aided strapdown inertial navigation system with limited information[J]. IEEE/ASME Trans.on Mechatronics, 2017, 22 (1): 329- 338.
doi: 10.1109/TMECH.2016.2616412 |
| 17 | 刘德铸, 郑翠娥, 张殿伦, 等. 传感器安装误差在声学多普勒计程仪中的校准[J]. 传感器与微系统, 2009, 28 (11): 71- 73. |
| LIU D Z , ZHENG C E , ZHANG D L , et al. Calibration of transducer's installation error for acoustic Doppler velocity log[J]. Transducer and Microsystem Technologies, 2009, 28 (11): 71- 73. | |
| 18 |
LI W L , ZHANG L D , SUN F P , et al. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation[J]. Optik, 2015, 126 (23): 3872- 3876.
doi: 10.1016/j.ijleo.2015.07.187 |
| 19 | LYU Z P, TANG K H, WU M P. Online estimation of DVL misalignment angle in SINS/DVL integrated navigation system[C]// Proc. of the IEEE 10th International Conference on Electronic Measurement & Instruments, 2011, 2: 336-339. |
| 20 | 徐晓苏, 杨阳, 李瑶. 一种基于梯度下降四元数理论的DVL误差标定方法[J]. 中国惯性技术学报, 2019, 27 (4): 448- 453. |
| XU X S , YANG Y , LI Y . DVL error calibration method based on gradient descent quaternion estimation theory[J]. Journal of Chinese Inertial Technology, 2019, 27 (4): 448- 453. | |
| 21 |
WANG D , XU X S , YANG Y , et al. A quasi-Newton quaternions calibration method for DVL error aided GNSS[J]. IEEE Trans.on Vehicular Technology, 2021, 70 (3): 2465- 2477.
doi: 10.1109/TVT.2021.3059755 |
| 22 |
WANG B , LIU J Y , DENG Z H , et al. A model-free calibration method of inertial navigation system and Doppler sensors[J]. IEEE Sensors Journal, 2021, 21 (2): 2219- 2229.
doi: 10.1109/JSEN.2020.3015845 |
| 23 | LI D , XU J N , ZHU B , et al. A calibration method of DVL in integrated navigation system based on particle swarm optimization[J]. Measurement, 2021, 187, 110325. |
| 24 | 杨阳. SINS/DVL一体化系统标定方法及组合定位技术研究[D]. 南京: 东南大学, 2020. |
| YANG Y. Research on calibration method and combined positioning technology of SINS/DVL integrated system[D]. Nanjing: Southeast University, 2020. | |
| 25 | XU B , WANG L Z , LI S X , et al. A novel calibration method of SINS/DVL integration navigation system based on quaternion[J]. IEEE Sensors Journal, 2020, 20 (16): 9567- 9580. |
| 26 | 刘静晓, 李海兵, 马思乐, 等. AUV组合导航系统中的DVL误差标定技术综述[C]//惯性技术发展动态发展方向研讨会论文集——前沿技术与惯性技术的融合与应用, 2021: 138-143. |
| LIU X J, LI H B, MA S L, et al. Overview of DVL error calibration technology in AUV integrated navigation system[C]//Proc. of the Symposium on Dynamic Development Direction of Inertial Technology—Fusion and Application of Cutting-Edge and Inertial Technology, 2021: 138-143. | |
| 27 |
XIANG Z Y , WANG Q , HUANG R , et al. Position observation-based calibration method for an LDV/SINS integrated navigation system[J]. Applied Optics, 2021, 60 (26): 7869- 7877.
doi: 10.1364/AO.430866 |
| 28 |
WU M P , WU Y X , HU X P , et al. Optimization-based alignment for inertial navigation system: theory and algorithm[J]. Aerospace Science and Technology, 2011, 15 (1): 1- 17.
doi: 10.1016/j.ast.2010.05.004 |
| 29 |
CHANG G B , XU T H , WANG Q X . Error analysis of Davenport's q method[J]. Automatica, 2017, 75, 217- 220.
doi: 10.1016/j.automatica.2016.09.018 |
| 30 | PAN X F , WU Y X . Underwater Doppler navigation with self-calibration[J]. Journal of Navigation, 2016, 69 (2): 295- 312. |
| 31 | LYU X , HU B Q , LI K L , et al. An adaptive and robust UKF approach based on Gaussian process regression-aided variational Bayesian[J]. IEEE Sensors Journal, 2021, 21 (7): 9500- 9514. |
| [1] | Haijian XUE, Tao WANG, Xinghui CAI, Jintao WANG, Ying JIANG. In-motion alignment method for vehicle carried SINS aided by odometer [J]. Systems Engineering and Electronics, 2023, 45(6): 1805-1813. |
| [2] | Kaidi JIN, Hongzhou CHAI, Chuhan SU, Minzhi XIANG, Ming LI. State transformation Kalman filter for DVL/SINS integral navigation system [J]. Systems Engineering and Electronics, 2023, 45(11): 3624-3631. |
| [3] | Tiangao ZHU, Yong LIU, Kailong LI, Renjie ZHAO. Analysis and comparison of Euler angles based-error model based on Lie groups of the strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2023, 45(10): 3265-3273. |
| [4] | Lichun GAO, Mingyang GAO, Xiaofang CHEN, Jianbing RAO, Zesong FEI, Shaojie NI. High precision approach-and-landing navigation technology based on SINS/GBAS integrated navigation [J]. Systems Engineering and Electronics, 2023, 45(1): 210-220. |
| [5] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [6] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [7] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [8] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [9] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [10] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [11] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [12] | Zhihao XU, Zhaofa ZHOU, Zhenjun CHANG, Qi GUO. Initial alignment method based on information reuse and algorithm fusion [J]. Systems Engineering and Electronics, 2021, 43(5): 1310-1315. |
| [13] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [14] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [15] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||