Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1357-1363.doi: 10.12305/j.issn.1001-506X.2024.04.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Compensation method for gravity disturbance in celestial/inertial integrated system
Yue LENG1,2,3,*, Sheng ZHONG1,2
- 1. School of Artificial Intelligence and Automation, Huazhong University of Science and Technology, Wuhan 430074, China
2. National Key Laboratory of Multispectral Information Intelligent Processing Technology, Wuhan 430074, China
3. Wuhan National Research Center for Optoelectronics, Huazhong Institute of Electro-Optics, Wuhan 430223, China
-
Received:2023-06-06Online:2024-03-25Published:2024-03-25 -
Contact:Yue LENG
CLC Number:
Cite this article
Yue LENG, Sheng ZHONG. Compensation method for gravity disturbance in celestial/inertial integrated system[J]. Systems Engineering and Electronics, 2024, 46(4): 1357-1363.
share this article

Fig.1
Schematic diagram of celstial/intertial integrated navigation system"


Fig.2
Flowchart of improved celestial/intertial integrated navigation algorithm"

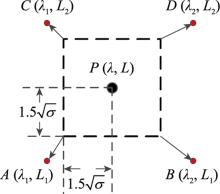
Fig.3
Local query area of gravity disturbance"


Fig.4
Schematic diagram of gravity disturbance extraction"


Fig.5
Driving route of test sports car"


Fig.6
Gravity disturbance measurement curve of high-precision digital zenith instrument"
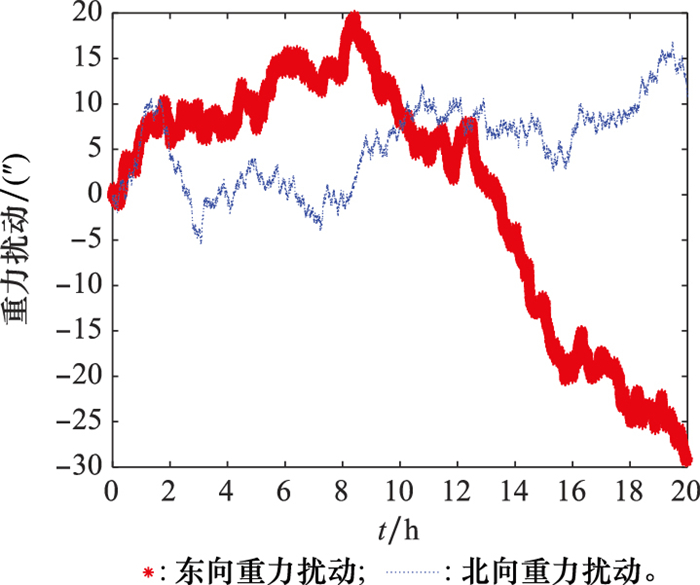

Fig.7
Comparison of navigation errors among intertial, celestial/intertial, celestial/intertial with gravity disturbance correction"


Fig.8
Enlargement diagram of celestial/intertial integrated navigation error before and after gravity disturbance correction"

Table 1
Comparison of navigation errors among intertial, celestial/intertial, celestial/intertial with gravity disturbance correction n mile"
| 统计时间段/h | 位置误差统计(最大误差) | ||
| 纯惯性 | 天/惯组合 (重力扰动修正前) | 天/惯组合 (重力扰动修正后) | |
| 10~12 | 1.8 | 1.9 | 1.1 |
| 12~14 | 2.7 | 1.5 | 0.8 |
| 14~18 | 3.5 | 2.8 | 1.7 |
| 18~20 | 3.7 | 2.4 | 0.5 |
| 1 |
LI C H , CHEN Z L , LIU X J , et al. Adaptively robust filtering algorithm for maritime celestial navigation[J]. Journal of Navigation, 2022, 75 (1): 200- 212.
doi: 10.1017/S0373463321000758 |
| 2 |
WU X J , WANG X L . A SINS/CNS deep integrated navigation method based on mathematical horizon reference[J]. Aircraft Engineering and Aerospace Technology, 2011, 83 (1): 26- 34.
doi: 10.1108/00022661111119892 |
| 3 | LIU X Q , ZHENG J M , LU J Z , et al. Reducing the effect of the accelerometer-slope bias error on the calibration error of a high-precision RLG INS system-level fitting method[J]. IEEE Trans.on Instrumentation and Measurement, 2021, 70 (1): 1- 9. |
| 4 |
LU J Z , LEI C H , YANG Y Q , et al. In-motion initial alignment and positioning with INS/CNS/ODO integrated navigation system for lunar rovers[J]. Advances in Space Research, 2017, 59 (12): 3070- 3079.
doi: 10.1016/j.asr.2017.03.011 |
| 5 |
WANG D J , LYU H F , WU J . A novel SINS/CNS integrated navigation method using model constraints for ballistic vehicle applications[J]. Journal of Navigation, 2017, 70 (6): 1415- 1437.
doi: 10.1017/S0373463317000418 |
| 6 | WANG Q Y , LI Y B , DIAO M , et al. Performance enhancement of INS/CNS integration navigation system based on particle swarm optimization back propagation neural network[J]. Ocean Engineering, 2015, 108 (1): 33- 45. |
| 7 |
WANG Q Y , CUI X F , LI Y B , et al. Performance enhancement of a USV INS/CNS/DVL integration navigation system based on an adaptive information sharing factor federated filter[J]. Sensors, 2017, 17 (2): 239- 249.
doi: 10.3390/s17020239 |
| 8 |
GOU B , CHENG Y M . INS/CNS integrated navigation based on corrected infrared earth measurement[J]. IEEE Trans.on Instrumentation and Measurement, 2019, 68 (9): 3358- 3366.
doi: 10.1109/TIM.2018.2872447 |
| 9 |
YAN F , ZHAO W Y , WANG X L , et al. Research on master-slave filtering of celestial navigation system/inertial navigation system[J]. Journal of Physics Conference Series, 2021, 1732, 012189.
doi: 10.1088/1742-6596/1732/1/012189 |
| 10 |
SIOURIS G M . Gravity modeling in aerospace applications[J]. Aerospace Science and Technology, 2009, 13 (6): 301- 315.
doi: 10.1016/j.ast.2009.05.005 |
| 11 |
JEKELI C , LEE J K , KWON J H . Modeling errors in upward continuation for INS gravity compensation[J]. Journal of Geodesy, 2007, 81 (5): 297- 309.
doi: 10.1007/s00190-006-0108-y |
| 12 |
WANG J , YANG G L , LI J , et al. An online gravity modeling method applied for high precision free-INS[J]. Sensors, 2016, 16 (10): 1541- 1560.
doi: 10.3390/s16101541 |
| 13 | TIE J B , CAO J L , WU M P , et al. Compensation of horizontal gravity disturbances for high precision inertial navigation[J]. Sensors, 2018, 18 (12): 906- 927. |
| 14 |
CHANG L B , QIN F J , WU M P . Gravity disturbance compensation for inertial navigation system[J]. IEEE Trans.on Instrumentation, 2019, 68 (10): 3751- 3765.
doi: 10.1109/TIM.2018.2879145 |
| 15 |
ZHU Z S , GUO Y Y , YE W , et al. A real-time gravity compensation method for a high-precision airborne position and orientation system based on a gravity map[J]. Journal of Navigation, 2018, 71 (3): 711- 728.
doi: 10.1017/S0373463317000790 |
| 16 | 翁海娜, 李鹏飞, 高峰, 等. 高精度惯导系统重力扰动的阻尼抑制方法[J]. 中国惯性技术学报, 2017, 25 (2): 141- 145. |
| WENG H N , LI P F , GAO F , et al. Damping suppression method for gravity disturbance of high-precision inertial navigation system[J]. Journal of Chinese Inertial Technology, 2017, 25 (2): 141- 145. | |
| 17 | 郝诗文, 张志利, 周召发, 等. 重力扰动对惯性导航系统初始对准的影响[J]. 系统工程与电子技术, 2020, 42 (7): 1575- 1581. |
| HAO S W , ZHANG Z L , ZHOU Z F , et al. Influence of gravity disturbance on initial alignment of inertial navigation system[J]. Systems Engineering and Electronics, 2020, 42 (7): 1575- 1581. | |
| 18 | 卢鑫, 练军想, 吴美平. 高精度舰载惯性导航系统的重力影响研究[J]. 导航与控制, 2010, 9 (4): 15- 21. |
| LU X , LIAN J X , WU M P . Research of gravity error compensation in marine inertial navigation system[J]. Navigation and Control, 2010, 9 (4): 15- 21. | |
| 19 |
DON K . A study of the EGM2008 model of earth's gravitational field[J]. Journal of Navigation, 2022, 75 (5): 1017- 1034.
doi: 10.1017/S0373463322000480 |
| 20 |
WU R N , WU Q P , HAN F T , et al. Gravity compensation using EGM2008 for high-precision long-term inertial navigation systems[J]. Sensors, 2016, 16 (12): 2177- 2180.
doi: 10.3390/s16122177 |
| 21 | PESHEKHONOV V G . Problem of the vertical deflection in high-precision inertial navigation[J]. Gyroscopy and Navigation, 2021, 11 (4): 255- 262. |
| 22 | PAVLIS N K , HOLMES S A , KENYON S C , et al. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008)[J]. Journal of Geophysical Research: Solid Earth, 2012, 24 (4): 117- 124. |
| 23 | WENG J , LIU J N , JIAO M X , et al. Analysis and on-line compensation of gravity disturbance in a high-precision inertial navigation system[J]. GPS Solutions, 2020, 24 (8): 26- 30. |
| 24 |
FANG J C , CHEN L Z T , YAO J F . An accurate gravity compensation method for high-precision airborne POS[J]. IEEE Trans.on Geoscience and Remote Sensing, 2014, 52 (8): 4564- 4573.
doi: 10.1109/TGRS.2013.2282423 |
| 25 |
HAO S W , ZHOU Z F , ZHANG Z L , et al. Analysis of gravity disturbance compensation for initial alignment of INS[J]. IEEE Access, 2020, 8, 137812- 137824.
doi: 10.1109/ACCESS.2020.3012450 |
| 26 | WANG J , YANG G L , LI X Y , et al. Application of the spherical harmonic gravity model in high precision inertial navigation systems[J]. Measurement Science and Technology, 2016, 27 (9): 95- 103. |
| 27 | 李倩, 王德昭, 吉宇人, 等. 重力扰动对极区下高精度惯导系统的影响分析及补偿[J]. 中国惯性技术学报, 2022, 30 (4): 429-436, 444. |
| LI Q , WANG D Z , JI Y R , et al. Gravity disturbance influence analysis and compensation on high-precision INS in polar region[J]. Journal of Chinese Inertial Technology, 2022, 30 (4): 429-436, 444. | |
| 28 |
ZHU Z S , TAN H , JIA Y , et al. Research on the gravity disturbance compensation terminal for high-precision position and orientation system[J]. Sensors, 2020, 20 (17): 4932- 4940.
doi: 10.3390/s20174932 |
| 29 |
WANG R , XIONG Z , LIU J Y , et al. A new tightly-coupled INS/CNS integrated navigation algorithm with weighted multi-stars observations[[J]. Proc.of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230 (4): 698- 712.
doi: 10.1177/0954410015596010 |
| 30 | 程风, 李海霞, 常乐, 等. CNS+GNSS+INS船载高精度实时定位定姿算法改进研究[J]. 测绘通报, 2019, (5): 30- 34. |
| CHEN G F , LI H X , CHANG L , et al. Research on improvement of CNS+GNSS+INS ship-borne high precision real-time positioning and attitude determination algorithms[J]. Bulletin of Surveying and Mapping, 2019, (5): 30- 34. | |
| 31 | 秦永元. 惯性导航[M]. 2版 北京: 科学出版社, 2014. |
| QIN Y Y . Inertial navigation[M]. 2nd ed Beijing: Press of Science, 2014. | |
| 32 | GROVES P D . Principles of GNSS, inertial, and multi-sensor integrated navigation systems[M]. 2nd ed London: Artech House, 2013. |
| 33 | GAO P Y , LI K , WANG L , et al. A self-calibration method for accelerometer nonlinearity errors in triaxis rotational inertial navigation system[J]. IEEE Trans.on Instrumentation and Measurement, 2016, 66 (2): 243- 253. |
| [1] | Hongjin ZHOU, Hui SONG, Wenliang FAN, Su WANG, Dongliang GU. Ship inertial navigation system position correction method based on Bayesian neural network [J]. Systems Engineering and Electronics, 2024, 46(4): 1393-1400. |
| [2] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [3] | Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions [J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684. |
| [4] | Shiwen HAO, Zhili ZHANG, Zhaofa ZHOU, Zhenjun CHANG, Xianyi LIU. Influence of gravity disturbance on initial alignment of inertial navigation system [J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581. |
| [5] | Jun WENG, Xiaoyun BIAN. Effect analysis and compensation of the high precision ring laser gyroscope inertial navigation system ZUPT caused by gravity disturbance [J]. Systems Engineering and Electronics, 2020, 42(1): 179-183. |
| [6] | JIANG Xiuhong, DUAN Fuhai, HU Ailing. Predictive maintenance for multistate system based on maintenance importance [J]. Systems Engineering and Electronics, 2018, 40(4): 839-844. |
| [7] | FANG Min, CHENG Ziyang, HE Zishu, LI Jun. Multi-target paring algorithm for distributed radar with INS error [J]. Systems Engineering and Electronics, 2018, 40(2): 308-313. |
| [8] | XIA Weixing, YANG Xiaodong. ESO estimation algorithm for gyro drift of INS [J]. Systems Engineering and Electronics, 2018, 40(12): 2804-2809. |
| [9] | WANG Wei, GUO Huijie, MENG Yue. Satellite/pseudolite/INS integrated navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(2): 391-397. |
| [10] | LI Ye1, GUO Jianguo1, ZHAO Bin1, YOU YuHua2, LU Xiaodong1, ZHOU Jun1. Aircraft dynamicsaided MEMS inertial navigation system [J]. Systems Engineering and Electronics, 2016, 38(8): 1880-1885. |
| [11] | DENG Zhi-hong, CAI Shan-bo, WANG Bo, FU Meng-yin. Compound rotation control algorithm for rotational INS [J]. Systems Engineering and Electronics, 2016, 38(11): 2610-2616. |
| [12] | LIU Shuai, SUN Fu-ping, ZHANG Lun-dong. Research on the tight integration of ambiguity-fixed PPP and INS [J]. Systems Engineering and Electronics, 2016, 38(10): 2389-2394. |
| [13] | CHENG Jian-hua, CHEN Dai-dai, WANG Bing-yu, WANG Tong-da. Approach of transfer alignment accuracy evaluation based on observability degree analysis [J]. Systems Engineering and Electronics, 2015, 37(4): 895-900. |
| [14] | CONG Li, LI Er-cui, ZHANG Li-yang, QIN Hong-lei, XUE Rui. GPS/INS integrated navigation attitude determination method based on CLAMBDA and AFM aided by INS [J]. Systems Engineering and Electronics, 2015, 37(4): 882-887. |
| [15] | KOU Kun-hu, ZHANG You-an, LIU Ai-li. Vision aided INS fast localization error modification method for cruise missiles [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 397-401. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||