Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (11): 3624-3631.doi: 10.12305/j.issn.1001-506X.2023.11.30
• Guidance, Navigation and Control • Previous Articles Next Articles
State transformation Kalman filter for DVL/SINS integral navigation system
Kaidi JIN1, Hongzhou CHAI1,*, Chuhan SU2, Minzhi XIANG1, Ming LI1
- 1. Institute of Geospatial Information, Strategic Support Force Information Engineering University, Zhengzhou 450001, China
2. PIESAT Institute of Applied Beidou Navigation Technologies at Zhengzhou, Zhengzhou 450001, China
-
Received:2022-05-26Online:2023-10-25Published:2023-10-31 -
Contact:Hongzhou CHAI
CLC Number:
Cite this article
Kaidi JIN, Hongzhou CHAI, Chuhan SU, Minzhi XIANG, Ming LI. State transformation Kalman filter for DVL/SINS integral navigation system[J]. Systems Engineering and Electronics, 2023, 45(11): 3624-3631.
share this article
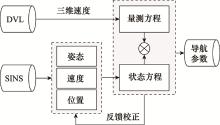
Fig.1
Data fusion process for DVL/SINS integral navigation"
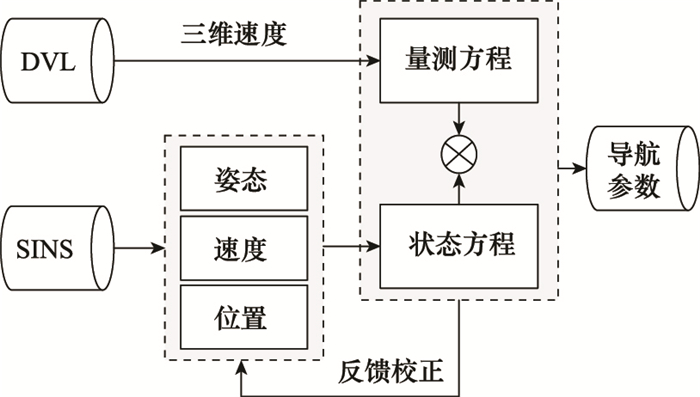
Fig.2
UUV simulation trajectory"
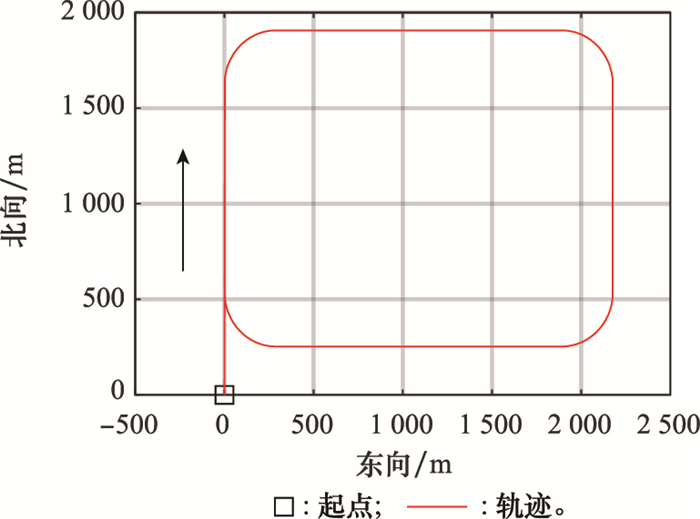
Table 1
Motion status of simulation trajectory"
| 运动状态 | 数值 | 数据区间/s |
| 加速 | 1 m/s2 | 0-10、301-306、667-672 |
| -1 m/s2 | 286-291、652-657、795-800 | |
| 匀速 | 10 m/s | 10-163、216-286、306-376、429-529、582-652、672-742 |
| 5 m/s | 291-301、657-667 | |
| 横滚 | 0.5°/s | 163-167、376-380、529-533、742-746 |
| -0.5°/s | 212-216、425-429、578-582、791-795 | |
| 转向 | 2°/s | 167-212、380-425、533-578、746-791 |
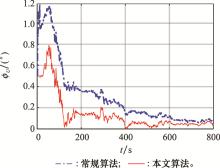
Fig.3
Mean of misalignment angle in U-direction"
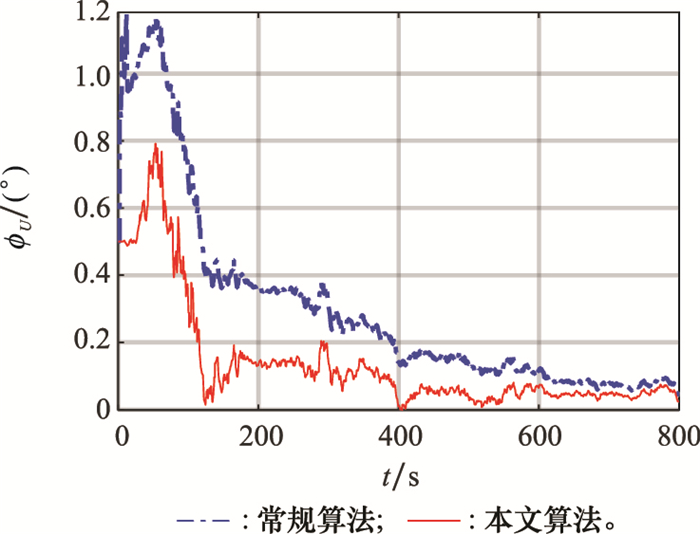

Fig.4
Mean error of velocity"
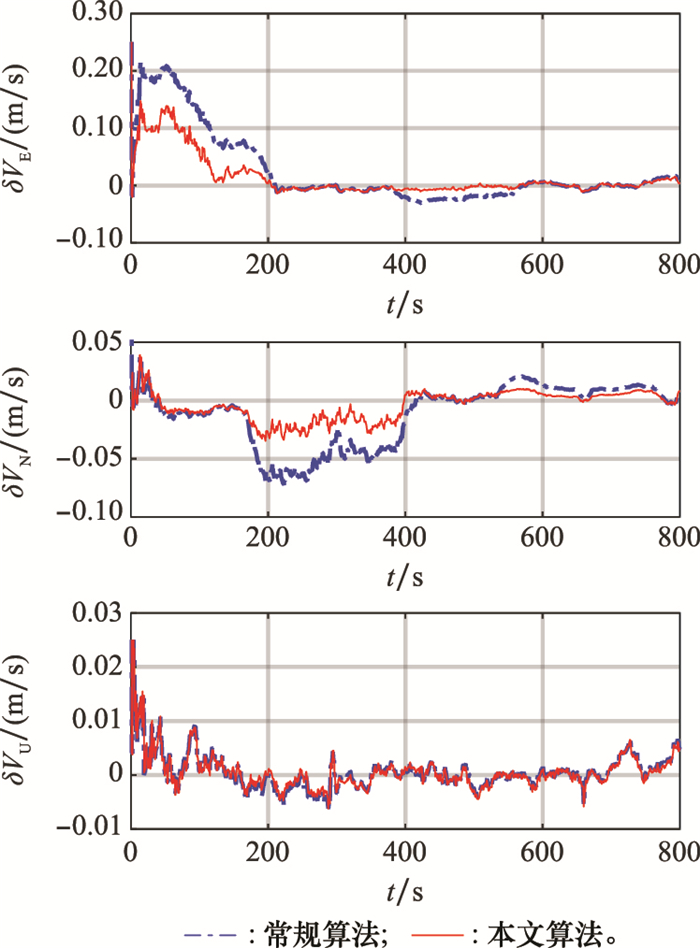

Fig.5
Mean error of position"
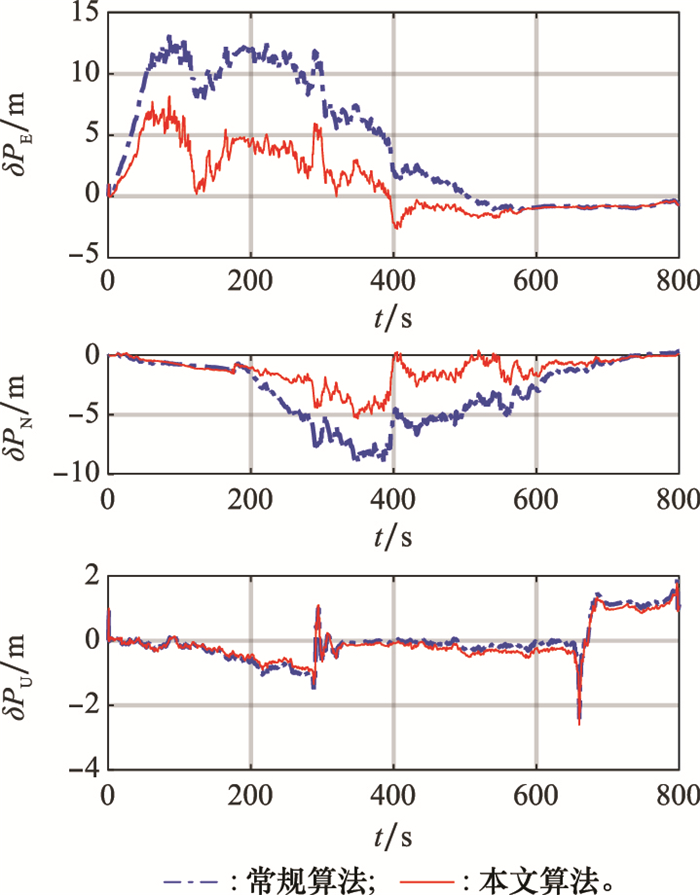
Fig.6
Mean of DVL scale cofficient"
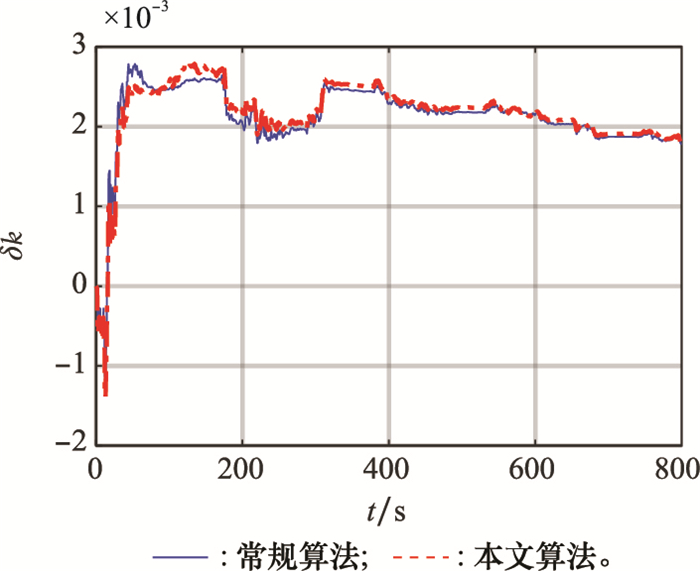
Fig.7
Mean of DVL install angle"
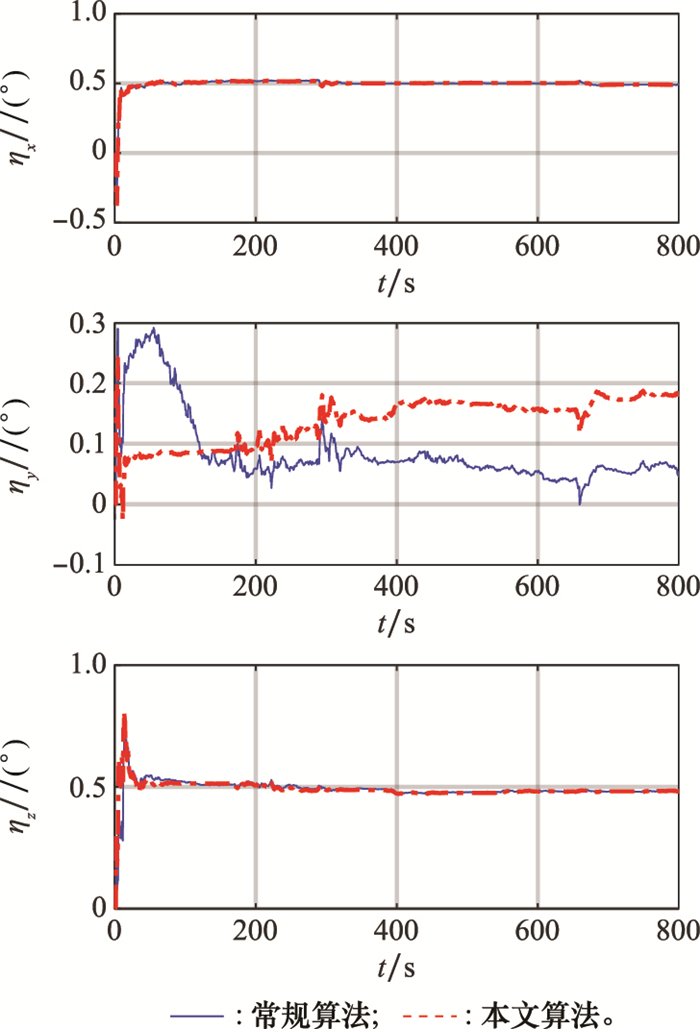

Fig.8
Mean of lever arm error for DVL"
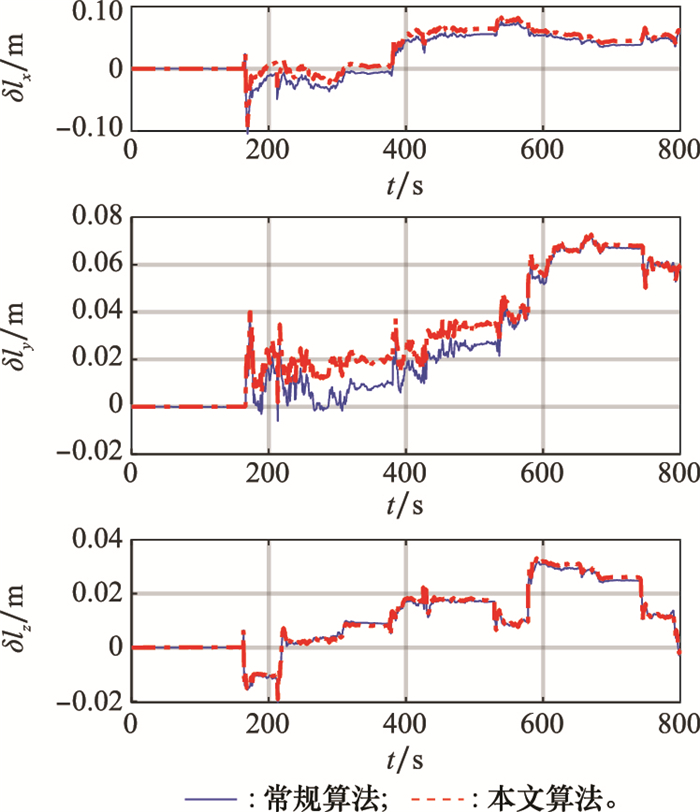
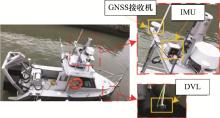
Fig.9
Shipborne platform and equipment"
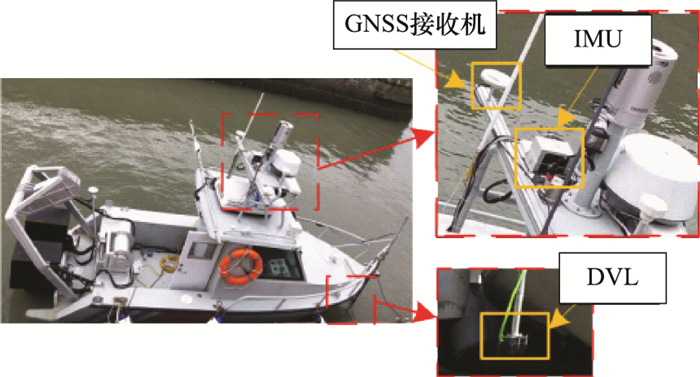

Fig.10
Trajectory of lake test in Wuhan"

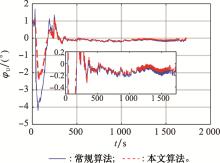
Fig.11
Misalignment angle in U-direction for lake test"
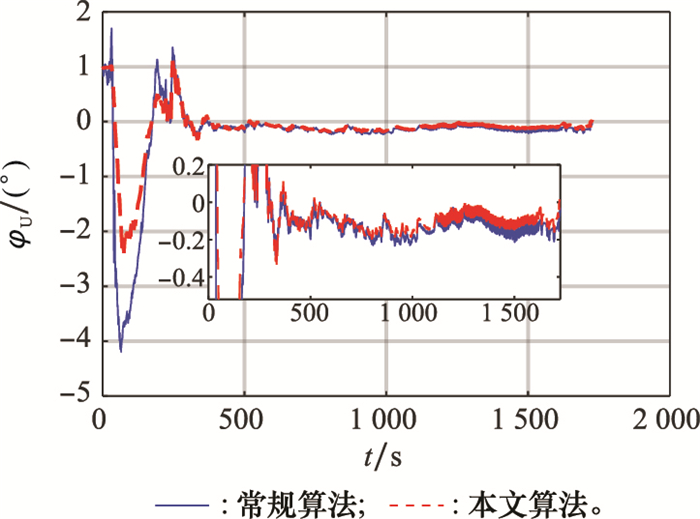

Fig.12
Velocity error for lake test"
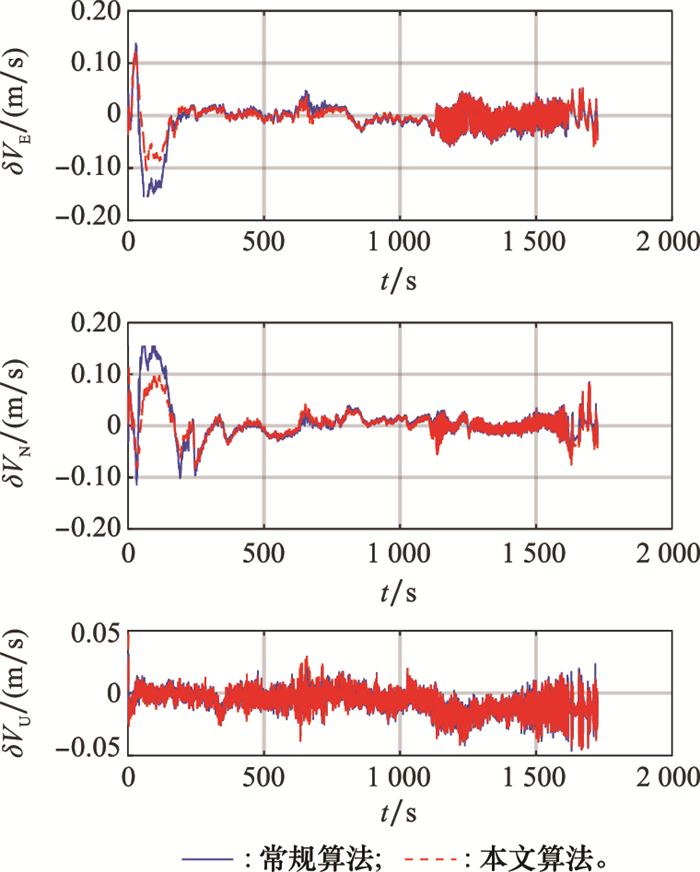
Fig.13
Position error for lake test"
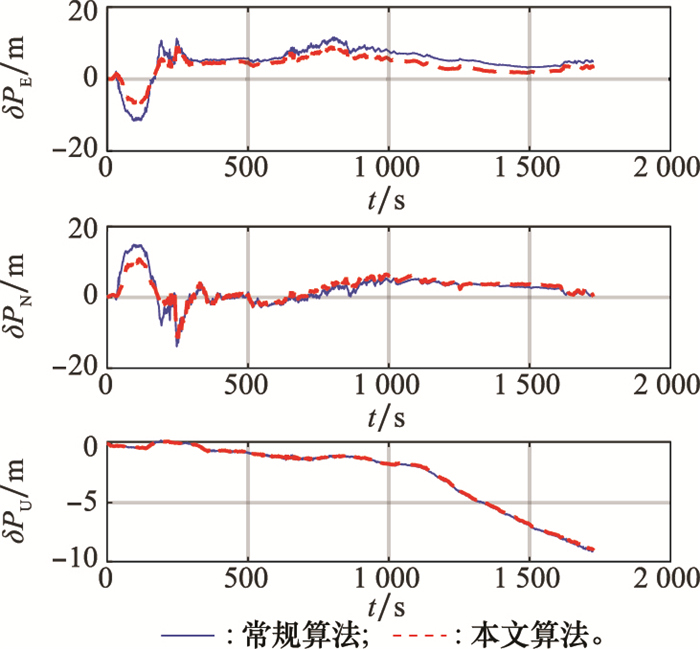
Table 2
RMSE of navigation parameters in lake test"
| 方案 | 失准角/(′) | 速度误差/(m/s) | 位置误差/m | ||||||||
| E | N | U | E | N | U | E | N | U | |||
| 常规算法 | 0.025 | 0.015 | 0.823 | 0.037 | 0.038 | 0.010 | 6.525 | 4.454 | 3.795 | ||
| 本文算法 | 0.025 | 0.014 | 0.469 | 0.024 | 0.026 | 0.010 | 4.662 | 4.028 | 3.737 | ||
| 1 |
PANDA J P , MITRA A , WARRIOR H V . A review on the hydrodynamic characteristics of autonomous underwater vehicles[J]. Proceedings of the Institution of Mechanical Engineers Part M-journal of Engineering for the Maritime Environment, 2021, 235 (1): 15- 29.
doi: 10.1177/1475090220936896 |
| 2 |
FU Q W , LIU Y , LIU Z B , et al. Autonomous in-motion alignment for land vehicle strapdown inertial navigation system without the aid of external sensors[J]. Journal of Navigation, 2018, 71 (6): 1312- 1328.
doi: 10.1017/S0373463318000437 |
| 3 |
LI W L , TANG K H , LU L Q , et al. Optimization-based INS in-motion alignment approach for underwater vehicles[J]. Optik, 2013, 124 (20): 4581- 4585.
doi: 10.1016/j.ijleo.2013.01.069 |
| 4 |
BERNELTE P J , PAPAELIAS M , GARCIA F P . Autonomous underwater vehicles: instrumentation and measurements[J]. IEEE Instrumentation and Measurement Magazine, 2020, 23 (2): 105- 114.
doi: 10.1109/MIM.2020.9062680 |
| 5 |
靳凯迪, 柴洪洲, 宿楚涵, 等. DVL/SINS组合导航技术发展现状及趋势[J]. 导航定位学报, 2022, 10 (2): 1-12, 92.
doi: 10.16547/j.cnki.10-1096.20220201 |
|
JIN K D , CHAI H Z , SU C H , et al. Research status and trends of DVL/SINS integrated navigation technology[J]. Journal of Navigation and Positioning, 2022, 10 (2): 1-12, 92.
doi: 10.16547/j.cnki.10-1096.20220201 |
|
| 6 |
ZHANG T W , TANG J L , QIN S J , et al. Review of navigation and positioning of deep-sea manned submersibles[J]. Journal of Navigation, 2019, 72 (4): 1021- 1034.
doi: 10.1017/S0373463319000080 |
| 7 |
RAHIMI H , NIKKHAH A , HOOSHMANDI K . A fast alignment of marine strapdown inertial navigation system based on adaptive unscented Kalman filter[J]. Trans.of the Institute of Measurement and Control, 2021, 43 (4): 749- 758.
doi: 10.1177/0142331220934293 |
| 8 | YOO T , KIM M , YOON S , et al. Performance enhancement for conventional tightly coupled INS/DVL navigation system using regeneration of partial DVL measurements[J]. Journal of Sensors, 2020, 5324349. |
| 9 |
LIU P J , WANG B , DENG Z H , et al. INS/DVL/PS tightly coupled underwater navigation method with limited DVL measurements[J]. IEEE Sensors Journal, 2018, 18 (7): 2994- 3002.
doi: 10.1109/JSEN.2018.2800165 |
| 10 | LIU S D , ZHANG T , ZHANG J Y , et al. A new coupled method of SINS/DVL integrated navigation based on improved dual adaptive factors[J]. IEEE Trans.on Instrumentation and Measurement, 2021, 70, 8504211. |
| 11 |
WANG D , XU X S , YAO Y Q , et al. A novel SINS/DVL tightly integrated navigation method for complex environment[J]. IEEE Trans.on Instrumentation and Measurement, 2020, 69 (7): 5183- 5196.
doi: 10.1109/TIM.2019.2955187 |
| 12 |
JIN K D , CHAI H Z , SU C H , et al. A compensation algorithm with motion constraint in DVL/SINS tightly coupled positioning[J]. Marine Geodesy, 2022, 45 (4): 380- 406.
doi: 10.1080/01490419.2022.2040662 |
| 13 | ALIAN M , LUIS H , HICHEM S , et al. Model-aided navigation with sea current estimation for an autonomous underwater vehicle[J]. International Journal of Advanced Robotic Systems, 2015, |
| 14 |
徐晓苏, 潘永飞, 邹海军. 基于自适应滤波的SINS/DVL组合导航系统[J]. 华中科技大学学报(自然科学版), 2015, 43 (3): 95-99, 106.
doi: 10.13245/j.hust.150319 |
|
XU X S , PAN Y F , ZOU H J . SINS/DVL integrated navigation system based on adaptive filtering[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2015, 43 (3): 95-99, 106.
doi: 10.13245/j.hust.150319 |
|
| 15 | SHI W C , XU J N , HE H Y , et al. Fault-tolerant SINS/HSB/DVL underwater integrated navigation system based on variational Bayesian robust adaptive Kalman filter and adaptive information sharing factor[J]. Measurement, 2022, 196 (23): 111225- 111234. |
| 16 |
LI K L , CHANG L B , HU B Q , et al. A variational Bayesian-based unscented Kalman filter with both adaptivity and robustness[J]. IEEE Sensors Journal, 2016, 16 (18): 6966- 6976.
doi: 10.1109/JSEN.2016.2591260 |
| 17 |
LI K L , LU X , LI W K , et al. Nonlinear error model based on quaternion for the INS: analysis and comparison[J]. IEEE Trans.on Vehicular Technology, 2021, 70 (1): 263- 272.
doi: 10.1109/TVT.2020.3046680 |
| 18 |
ZHU T G , LIU Y , LI W K , et al. The quaternion-based attitude error for the nonlinear error model of the INS[J]. IEEE Sensors Journal, 2021, 21 (22): 25782- 25795.
doi: 10.1109/JSEN.2021.3118039 |
| 19 |
ANDRLE M S , CRASSIDIS J L . Attitude estimation employing common frame error representations[J]. Journal of Gui-dance, Control, and Dynamics, 2015, 38 (9): 1614- 1624.
doi: 10.2514/1.G001025 |
| 20 |
WANG M S , WU W Q , ZHOU P Y , et al. State transformation extended Kalman filter for GPS/SINS tightly coupled integration[J]. GPS Solutions, 2018, 22 (4): 112.
doi: 10.1007/s10291-018-0773-3 |
| 21 |
WANG M S , WU W Q , HE X F , et al. Consistent ST-EKF for long distance land vehicle navigation based on SINS/OD integration[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (11): 10525- 10534.
doi: 10.1109/TVT.2019.2939679 |
| 22 | WANG M S , ZHAO Q C , WU W Q , et al. State transformation multi-state constraint Kalman filter for visual-inertial integrated navigation[J]. Journal of Chinese Inertial Technology, 2021, 29 (2): 199- 207. |
| 23 |
王茂松, 吴文启, 何晓峰, 等. 状态变换卡尔曼滤波的进一步解释及应用[J]. 中国惯性技术学报, 2019, 27 (4): 499-504, 509.
doi: 10.13695/j.cnki.12-1222/o3.2019.04.013 |
|
WANG M S , WU W Q , HE X F , et al. Further explanation and application of state transformation extended Kalman filter[J]. Journal of Chinese Inertial Technology, 2019, 27 (4): 499-504, 509.
doi: 10.13695/j.cnki.12-1222/o3.2019.04.013 |
|
| 24 |
CHANG L B , QIN F J , JIANG S . Strapdown inertial navigation system initial alignment based on modified process model[J]. IEEE Sensors Journal, 2019, 19 (15): 6381- 6391.
doi: 10.1109/JSEN.2019.2910213 |
| 25 | 赵仁杰, 李开龙, 胡柏青, 等. 基于改进四元数阻尼误差模型的SINS初始对准算法[J]. 系统工程与电子技术, 2021, 43 (11): 3330- 3337. |
| ZHAO R J , LI K L , HU B Q , et al. SINS initial alignment algorithm based on improved quaternion damping error model[J]. Systems Engineering and Electronics, 2021, 43 (11): 3330- 3337. | |
| 26 |
KLEIN I , DIAMANT R . Observability analysis of heading aided INS for a maneuvering UUV[J]. Navigation, 2018, 65 (1): 73- 82.
doi: 10.1002/navi.222 |
| 27 | 严恭敏, 邓瑀. 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7 (2): 50- 64. |
| YAN G M , DENG Y . Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning and Timing, 2020, 7 (2): 50- 64. | |
| 28 | 陈建华, 朱海, 王超, 等. 水下SINS/DVL紧组合导航算法[J]. 海军工程大学学报, 2017, 29 (2): 108- 112. |
| CHEN J H , ZHU H , WANG C , et al. Underwater SINS/DVL tightly integrated navigation algorithm[J]. Journal of Naval University of Engineering, 2017, 29 (2): 108- 112. | |
| 29 |
TAL A , KLEIN I , KATZ R . Inertial navigation system/Doppler velocity log (INS/DVL) fusion with partial DVL measurements[J]. Sensors, 2017, 17 (2): 415- 434.
doi: 10.3390/s17020415 |
| 30 |
LI W L , ZHANG L D , SUN F P , et al. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation[J]. Optik, 2015, 126 (23): 3872- 3876.
doi: 10.1016/j.ijleo.2015.07.187 |
| [1] | Xibin WANG, Hongde DAI, Wenjie QUAN, Rui WANG, Linsheng JIA. Nonzero velocity interval attitude estimation CKF algorithm based on acceleration compensation for inertial pedestrian navigation [J]. Systems Engineering and Electronics, 2023, 45(9): 2894-2901. |
| [2] | Hongde DAI, Yufeng MA, Shaowu DAI, Baidong ZHENG, Xiaoyu ZHANG. Zero velocity update algorithm for inertial pedestrian navigation based on nonlinear prediction of heading error [J]. Systems Engineering and Electronics, 2023, 45(8): 2555-2561. |
| [3] | Haijian XUE, Tao WANG, Xinghui CAI, Jintao WANG, Ying JIANG. In-motion alignment method for vehicle carried SINS aided by odometer [J]. Systems Engineering and Electronics, 2023, 45(6): 1805-1813. |
| [4] | Lican DAI, Xin LIU, Haiying ZHANG, Xiang DAI, Chenggang WANG. Flight target track prediction based on Kalman filter algorithm unfolding [J]. Systems Engineering and Electronics, 2023, 45(6): 1814-1820. |
| [5] | Yikang HE, Wenhan ZHANG, Zhenhua WANG, Wen HE. Solar cell array rotation angle estimation method for satellite emergency recovery [J]. Systems Engineering and Electronics, 2023, 45(3): 797-805. |
| [6] | Hongqiong TANG, Jiangning XU, Wence SHI, Hongyang HE, Fangneng LI. Davenport quaternion DVL calibration method based on position observation information [J]. Systems Engineering and Electronics, 2023, 45(11): 3640-3648. |
| [7] | Tiangao ZHU, Yong LIU, Kailong LI, Renjie ZHAO. Analysis and comparison of Euler angles based-error model based on Lie groups of the strapdown inertial navigation system [J]. Systems Engineering and Electronics, 2023, 45(10): 3265-3273. |
| [8] | Jing MU, Dongsheng YAN, Yuanli CAI, Changyuan WANG. Masreliez-Martin method based robust fractional cubature Kalman filtering algorithm and its applications [J]. Systems Engineering and Electronics, 2023, 45(1): 234-240. |
| [9] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [10] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [11] | Guang ZHAI, Yanxin WANG, Yiyong SUN. Cooperative tracking filtering technology of multi-target based on low orbit satellite constellation [J]. Systems Engineering and Electronics, 2022, 44(6): 1957-1967. |
| [12] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [13] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [14] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [15] | Qi WANG, Zhizhong LIAO, Fei YAN. Algorithm for countering velocity gate pull-off jamming of radar seeker based on probability data association [J]. Systems Engineering and Electronics, 2022, 44(2): 448-454. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||