Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (6): 1814-1820.doi: 10.12305/j.issn.1001-506X.2023.06.25
• Guidance, Navigation and Control • Previous Articles
Flight target track prediction based on Kalman filter algorithm unfolding
Lican DAI, Xin LIU, Haiying ZHANG, Xiang DAI, Chenggang WANG
- No.2 Laboratory, The 10th Research Institute of China Electronics Technology Group Corporation, Chengdu 610036, China
-
Received:2022-02-07Online:2023-05-25Published:2023-06-01 -
Contact:Lican DAI
CLC Number:
Cite this article
Lican DAI, Xin LIU, Haiying ZHANG, Xiang DAI, Chenggang WANG. Flight target track prediction based on Kalman filter algorithm unfolding[J]. Systems Engineering and Electronics, 2023, 45(6): 1814-1820.
share this article
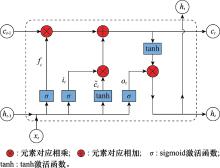
Fig.1
Architecture of LSTM network"
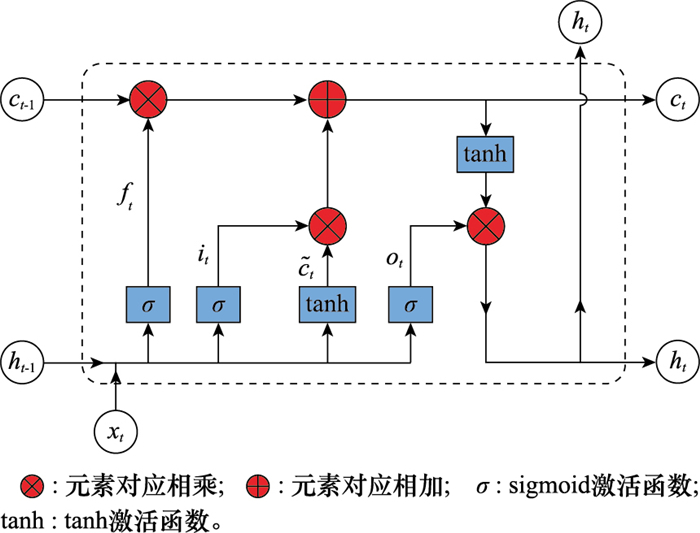

Fig.2
Structure of KFU-LSTM-Net"
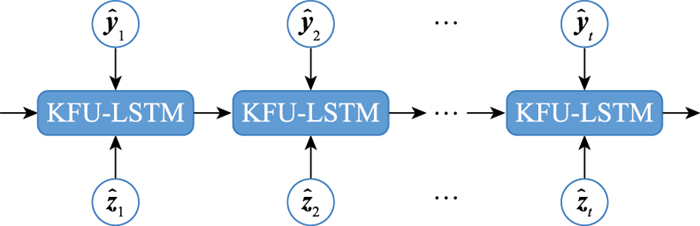

Fig.3
Internal structure of KFU-LSTM block"
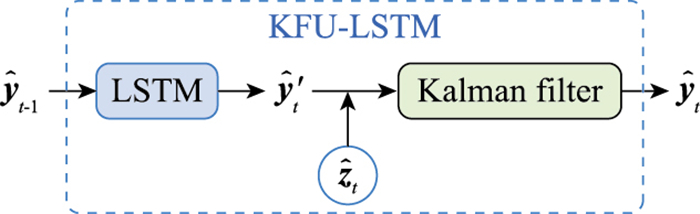
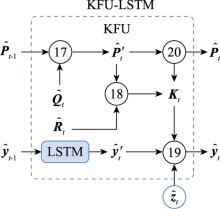
Fig.4
Kalman filter algorithm unfolding diagram"
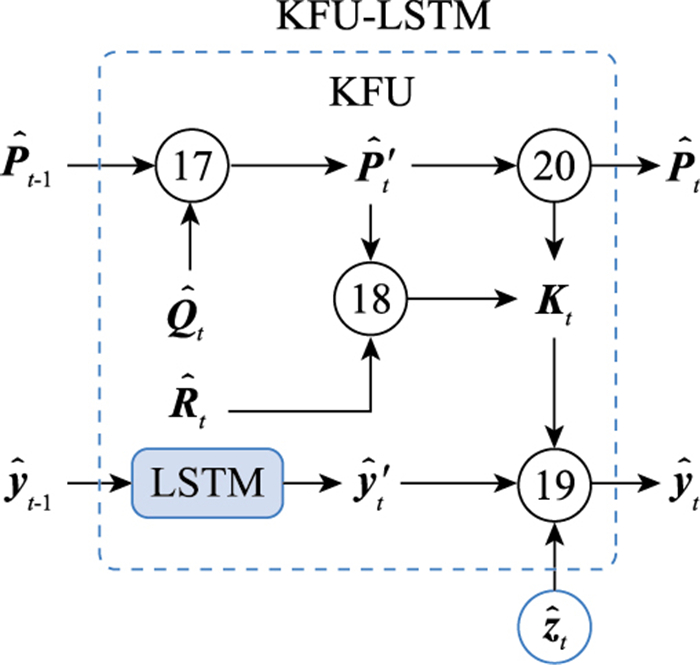

Fig.5
LSTM block structure"
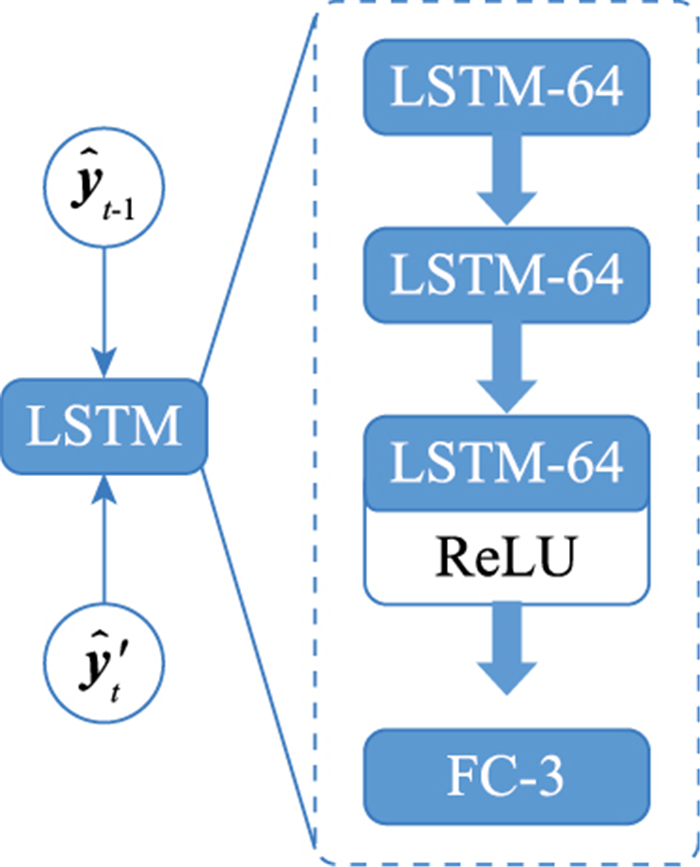
Table 1
Network training strategy and parameters setting"
| 网络模型 | RNN | LSTM | KFU-LSTM |
| 优化器 | Adam | Adam | Adam |
| 训练批尺寸 | 16 | 16 | 16 |
| 学习率 | 1×10-3 | 1×10-3 | 1×10-3 |
| 训练轮数 | 40 | 40 | 20 |
| 迭代次数 | 6.4×104 | 6.4×104 | 3.2×104 |
Table 2
List of experiment environments"
| 硬件环境 | 处理器 | Intel(R) Core(TM) i7-9750H CPU @ 2.60GHz |
| 显卡 | NVIDIA GTX 1660Ti, 6 GB | |
| 内存 | 16 GB | |
| 软件环境 | 操作系统 | Windows 10(64bit) |
| 编程语言 | Python 3.6 | |
| 编程框架 | Pytorch 1.1 | |
| 集成开发环境 | PyCharm 2020.2.1 (Community Edition) |
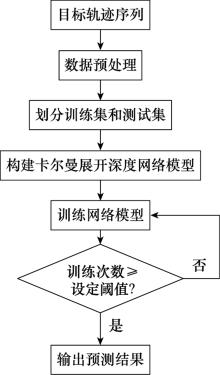
Fig.6
Overall prediction flowchart of the model"
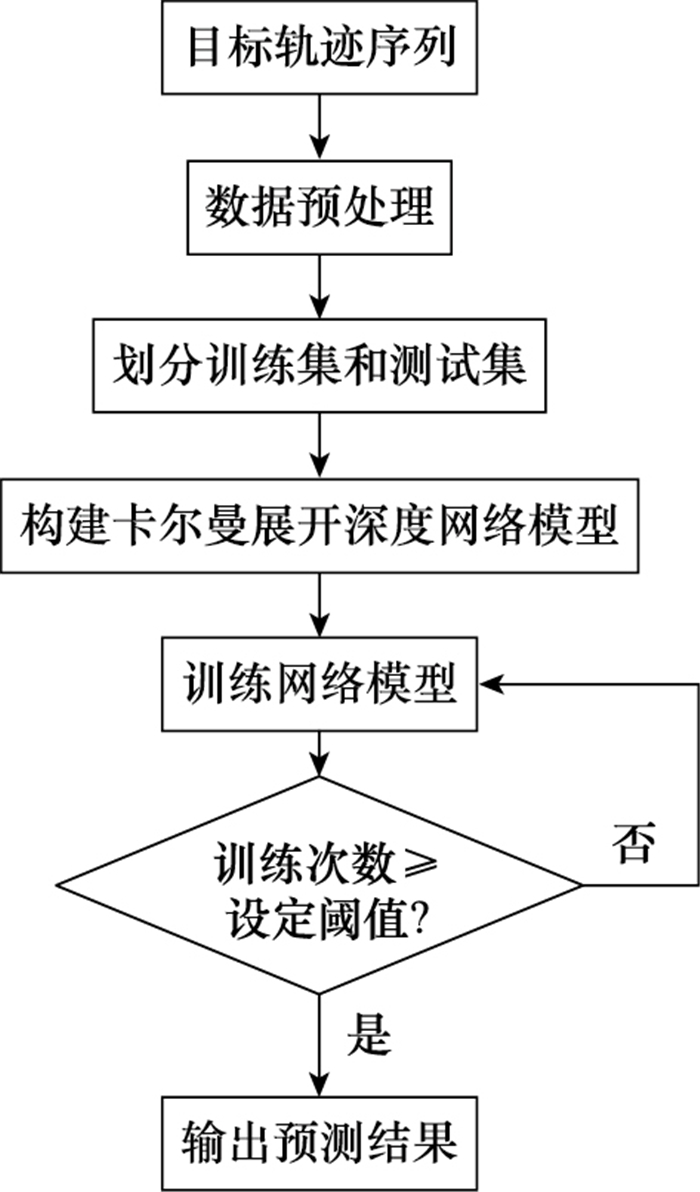
Table 3
Parameter equation and variable values for simulation data"
| 仿真数据 | 参数方程 | 参数描述 |
| 1 | 0≤t≤8π, 时间点数量为200 | |
| 2 | 0≤t≤6π, 时间点数量为300 | |
| 3 | 0≤t≤6π, 时间点数量为300 |
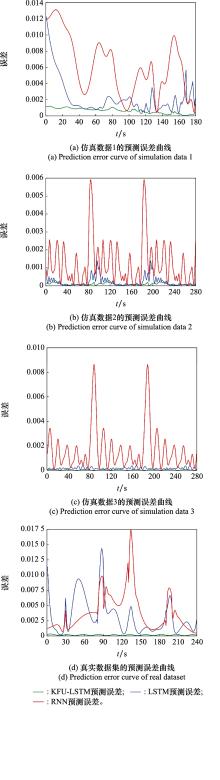
Fig.7
Comparison of model track prediction errors"

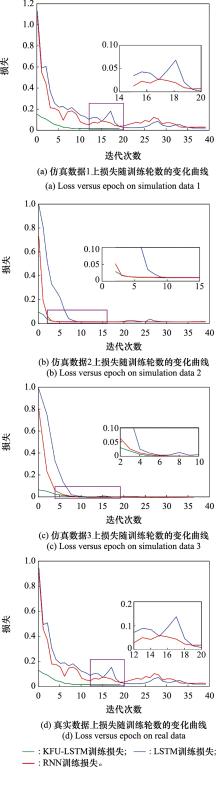
Fig.8
Comparison diagram of model loss with epochs"

Table 4
RMSE of model target track prediction results"
| 模型 | RNN | LSTM | KFU-LSTM |
| 仿真数据1 | 0.078 16 | 0.047 24 | 0.011 06 |
| 仿真数据2 | 0.035 44 | 0.014 15 | 0.008 65 |
| 仿真数据3 | 0.040 10 | 0.011 42 | 0.008 34 |
| 真实数据 | 0.061 62 | 0.055 79 | 0.004 39 |
| 28 | BENGIO Y , SIMARD P , FRASCONI P . Learning long-term dependencies with gradient descent is difficult[J]. IEEE Trans.on Neural Networks, 1994, 5 (2): 157- 166. |
| 29 | GREFF K , SRIVASTAVA R K , KOUTNIK J , et al. LSTM: a search space odyssey[J]. IEEE Trans.on Neural Networks and Learning Systems, 2016, 28 (10): 2222- 2232. |
| 30 | SHERSTINSKY A . Fundamentals of recurrent neural network (RNN) and long short-term memory (LSTM) network[J]. Physica D: Nonlinear Phenomena, 2020, 404, 132306. |
| 31 | GLOROT X, BENGIO Y. Understanding the difficulty of training deep feedforward neural networks[C]//Proc. of the 13th International Conference on Artificial Intelligence and Statistics, 2010. |
| 32 | KINGMA D P, BA J. Adam: a method for stochastic optimization[EB/OL]. [2022-01-07]. https://arxiv.org/abs/1412.6980. |
| 1 |
ZENG W L , CHU X , XU Z F , et al. Aircraft 4D trajectory prediction in civil aviation: a review[J]. Aerospace, 2022, 9 (2): 91- 109.
doi: 10.3390/aerospace9020091 |
| 2 |
LIU R W , LIANG M H , NIE J T , et al. Deep learning-powered vessel trajectory prediction for improving smart traffic services in maritime Internet of Things[J]. IEEE Trans.on Network Science and Engineering, 2022, 9 (5): 3080- 3094.
doi: 10.1109/TNSE.2022.3140529 |
| 3 |
LEON F , GAVRILESCU M . A review of tracking and trajectory prediction methods for autonomous driving[J]. Mathematics, 2021, 9 (6): 660- 696.
doi: 10.3390/math9060660 |
| 4 | LYMPEROPOULOS I, LYGEROS J, LECCHINI A. Model based aircraft trajectory prediction during takeoff[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2006. |
| 5 | GALLO E. Quasi static atmospheric model for aircraft trajectory prediction and flight simulation[EB/OL]. [2022-01-07]. https://arxi.org/abs/2101.10744. |
| 6 | JIANG S Y , LUO X , HE L . Research on method of trajectory prediction in aircraft flight based on aircraft performance and historical track data[J]. Mathematical Problems in Engineering, 2021, 2021, 6688213. |
| 7 | SCHULTZ C, THIPPHAVONG D, ERZBERGER H. Adaptive trajectory prediction algorithm for climbing flights[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2012. |
| 8 |
SCHUSTER W , PORRETTA M , OCHIENG W . High-accuracy four-dimensional trajectory prediction for civil aircraft[J]. The Aeronautical Journal, 2012, 116 (1175): 45- 66.
doi: 10.1017/S0001924000006618 |
| 9 | BENAVIDES J V, KANESHIGE J, SHARMA S, et al. Implementation of a trajectory prediction function for trajectory based operations[C]//Proc. of the AIAA Atmospheric Flight Mechanics Conference, 2014. |
| 10 |
LIU W , LIANG X , ZHENG M . Dynamic model informed human motion prediction based on unscented kalman filter[J]. IEEE/ASME Trans.on Mechatronics, 2022, 27 (6): 5287- 5295.
doi: 10.1109/TMECH.2022.3173167 |
| 11 | JULIER S J, UHLMANN J K. New extension of the Kalman filter to nonlinear systems[C]//Proc. of the Signal Processing, Sensor Fusion, and Target Recognition VI. International Society for Optics and Photonics, 1997. |
| 12 |
GUO G , ZHAO S J . 3D multi-object tracking with adaptive cubature Kalman filter for autonomous driving[J]. IEEE Trans.on Intelligent Vehicles, 2023, 8 (1): 512- 519.
doi: 10.1109/TIV.2022.3158419 |
| 13 | QIAO S J , HAN N , ZHU X W , et al. A dynamic trajectory prediction algorithm based on Kalman filter[J]. Acta Electonica Sinica, 2018, 46 (2): 418- 423. |
| 14 |
CHOI H C , DENG C , HWANG I . Hybrid machine learning and estimation-based flight trajectory prediction in terminal airspace[J]. IEEE Access, 2021, 9, 151186- 151197.
doi: 10.1109/ACCESS.2021.3126117 |
| 15 |
HASHEMI S M , BOTEZ R M , GRIGORIE T L . New reliabi-lity studies of data-driven aircraft trajectory prediction[J]. Aerospace, 2020, 7 (10): 145- 152.
doi: 10.3390/aerospace7100145 |
| 16 | SCHIMPF N, KNOBLOCK E J, WANG Z, et al. Flight tra-jectory prediction based on hybrid-recurrent networks[C]// Proc. of the IEEE Cognitive Communications for Aerospace Applications Workshop, 2021. |
| 17 | PANG Y T, LIU Y M. Conditional generative adversarial networks (CGAN) for aircraft trajectory prediction considering weather effects[C]//Proc. of the AIAA Scitech Forum, 2020. |
| 18 |
DALMAU R , PRATS X , VERHOEVEN R , et al. Comparison of various guidance strategies to achieve time constraints in optimal descents[J]. Journal of Guidance, Control, and Dynamics, 2019, 42 (7): 1612- 1621.
doi: 10.2514/1.G004019 |
| 19 | 吕波, 王超. 改进的扩展卡尔曼滤波在航空器4D航迹预测算法中的应用[J]. 计算机应用, 2021, 41 (S1): 277- 282. |
| LYU B , WANG C . Application of improved extended Kalman filter in 4D flight path prediction algorithm of aircraft[J]. Journal of Computer Applications, 2021, 41 (S1): 277- 282. | |
| 20 |
陈明强, 傅嘉赟. 基于无迹卡尔曼滤波的飞行航迹预测方法研究[J]. 计算机仿真, 2021, 38 (6): 27- 30.
doi: 10.3969/j.issn.1006-9348.2021.06.006 |
|
CHEN M Q , FU J Y . Research on flight path prediction method based on untraced Kalman filter[J]. Computer Simulation, 2021, 38 (6): 27- 30.
doi: 10.3969/j.issn.1006-9348.2021.06.006 |
|
| 21 | ZHANG X W, YU W Z. Research on the application of Kalman filter algorithm in aircraft trajectory analysis[C]//Proc. of the IEEE 7th International Conference on Intelligent Computing and Signal Processing, 2022. |
| 22 | RALAIVOLA L, D'ALCHE-BUC F. Time series filtering, smoothing and learning using the kernel Kalman filter[C]// Proc. of the IEEE International Joint Conference on Neural Networks, 2005. |
| 23 | 钱夔, 周颖, 杨柳静, 等. 基于BP神经网络的空中目标航迹预测模型[J]. 指挥信息系统与技术, 2017, 8 (3): 54- 58. |
| QIAN K , ZHOU Y , YANG L J , et al. Air target track prediction model based on BP neural network[J]. Command Information System and Technology, 2017, 8 (3): 54- 58. | |
| 24 |
吴一凡, 冉晓旻. CNN神经网络在航迹预测中的应用[J]. 电子设计工程, 2019, 27 (12): 13- 20.
doi: 10.3969/j.issn.1674-6236.2019.12.003 |
|
WU Y F , RAN X M . Application of CNN neural network in track prediction[J]. Electronic Design Engineering, 2019, 27 (12): 13- 20.
doi: 10.3969/j.issn.1674-6236.2019.12.003 |
|
| 25 | GRAVES A, MOHAMED A, HINTON G. Speech recognition with deep recurrent neural networks[C]//Proc. of the IEEE International Conference on Acoustics, Speech and Signal Processing, 2013. |
| 26 |
HOCHREITER S , SCHMIDHUBER J . Long short-term memory[J]. Neural Computation, 1997, 9 (8): 1735- 1780.
doi: 10.1162/neco.1997.9.8.1735 |
| 27 |
HOCHREITER S . Recurrent neural net learning and vanishing gradient[J]. International Journal of Uncertainity, Fuzziness and Knowledge-Based Systems, 1998, 6 (2): 107- 116.
doi: 10.1142/S0218488598000094 |
| [1] | Yikang HE, Wenhan ZHANG, Zhenhua WANG, Wen HE. Solar cell array rotation angle estimation method for satellite emergency recovery [J]. Systems Engineering and Electronics, 2023, 45(3): 797-805. |
| [2] | Botao SONG, Guangliang XU. Missile trajectory prediction method based on LSTM and 1DCNN [J]. Systems Engineering and Electronics, 2023, 45(2): 504-512. |
| [3] | Jing MU, Dongsheng YAN, Yuanli CAI, Changyuan WANG. Masreliez-Martin method based robust fractional cubature Kalman filtering algorithm and its applications [J]. Systems Engineering and Electronics, 2023, 45(1): 234-240. |
| [4] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [5] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [6] | Guang ZHAI, Yanxin WANG, Yiyong SUN. Cooperative tracking filtering technology of multi-target based on low orbit satellite constellation [J]. Systems Engineering and Electronics, 2022, 44(6): 1957-1967. |
| [7] | Ruiping JI, Chengyi ZHANG, Yan LIANG, Yuedong WANG. Trajectory prediction of boost-phase ballistic missile based on LSTM [J]. Systems Engineering and Electronics, 2022, 44(6): 1968-1976. |
| [8] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [9] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [10] | Zhaoguo HOU, Huawei WANG, Liang ZHOU, Qiang FU. Fault diagnosis of rotating machinery based on improved deep residual network [J]. Systems Engineering and Electronics, 2022, 44(6): 2051-2059. |
| [11] | Qi WANG, Zhizhong LIAO, Fei YAN. Algorithm for countering velocity gate pull-off jamming of radar seeker based on probability data association [J]. Systems Engineering and Electronics, 2022, 44(2): 448-454. |
| [12] | Yi LIU, Xiaoxiong ZHOU, Guangjun CHENG. High dynamic carrier tracking technology in frequency hopping systems [J]. Systems Engineering and Electronics, 2022, 44(2): 677-683. |
| [13] | Zhaoqiang SUN, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN. Ballistic target tracking filter design based on EKF and ballistic equations [J]. Systems Engineering and Electronics, 2022, 44(10): 3207-3212. |
| [14] | Pingan ZHANG, Wei WANG, Min GAO, Yi WANG. Research on SR-CH∞KF for projectile attitude measurement [J]. Systems Engineering and Electronics, 2022, 44(1): 262-269. |
| [15] | Heliang YUAN, Tian JIN, Jiaqing QU, Hongli LYU. Processing technology of discontinuous satellite navigation signal under rotating condition [J]. Systems Engineering and Electronics, 2021, 43(9): 2573-2580. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||