Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (7): 2302-2310.doi: 10.12305/j.issn.1001-506X.2022.07.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Cooperative target tracking of UAVs based on aided beacon
Haoran SHI*, Faxing LU, Jiangxin QI, Guang YANG
- College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China
-
Received:2021-06-01Online:2022-06-22Published:2022-06-28 -
Contact:Haoran SHI
CLC Number:
Cite this article
Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon[J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310.
share this article
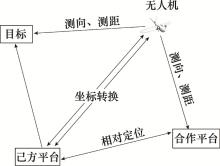
Fig.1
Concept figure of attitude correction by the unmanned aerial vehicle based on aided beacon"
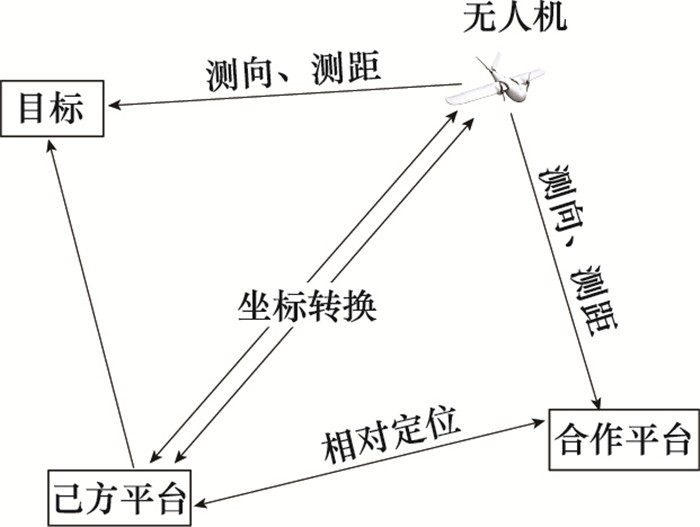
Fig.2
Structure diagram of cooperative tracking algorithm by two unmanned aerial vehicles"
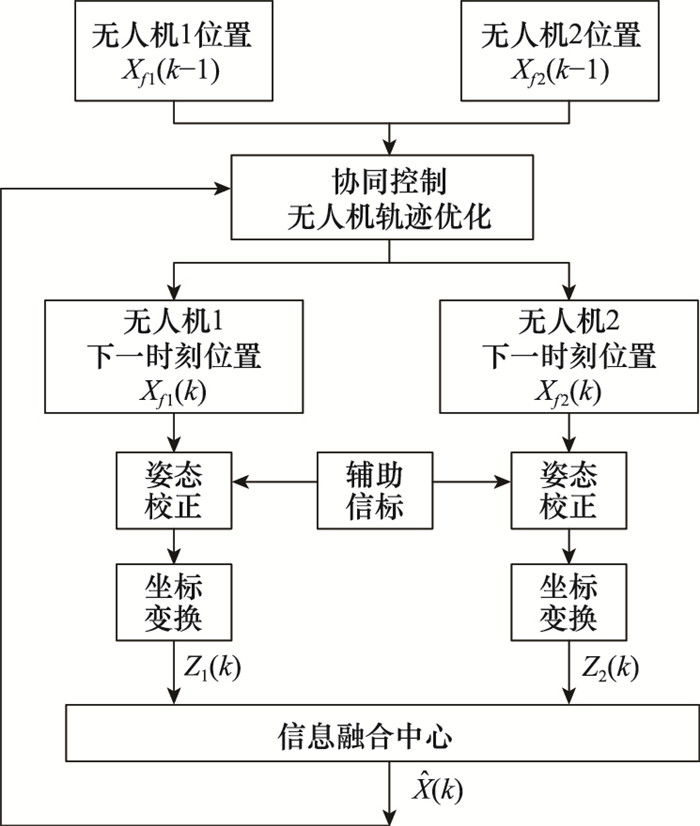
Fig.3
RMSE of target position through observation by the single unmanned aerial vehicle"
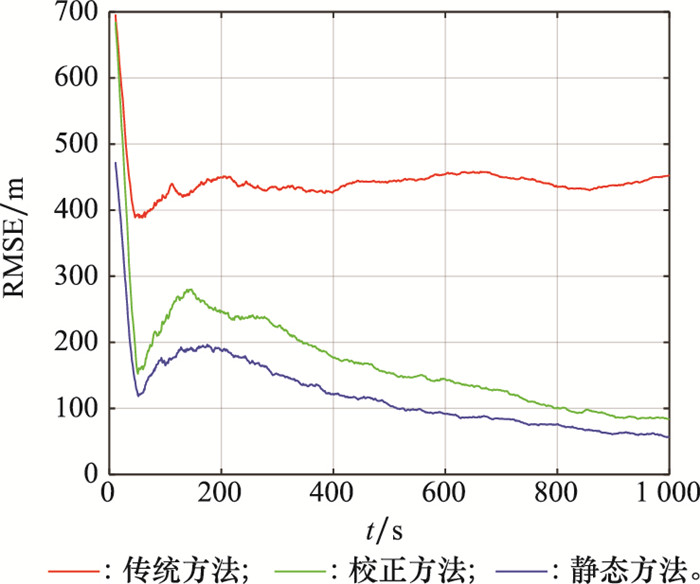
Fig.4
RMSE of target position under different filter algorithms"
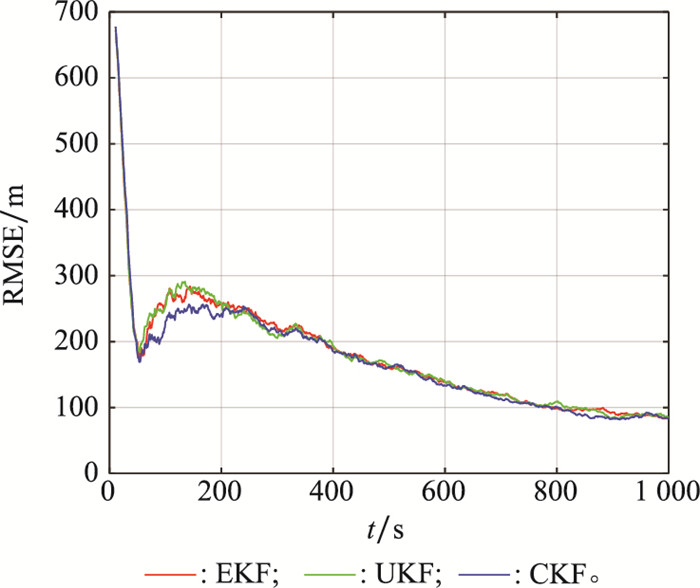
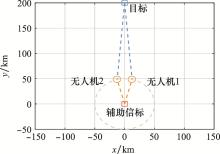
Fig.5
Space situation diagram of target positioning by two unmanned aerial vehicles"
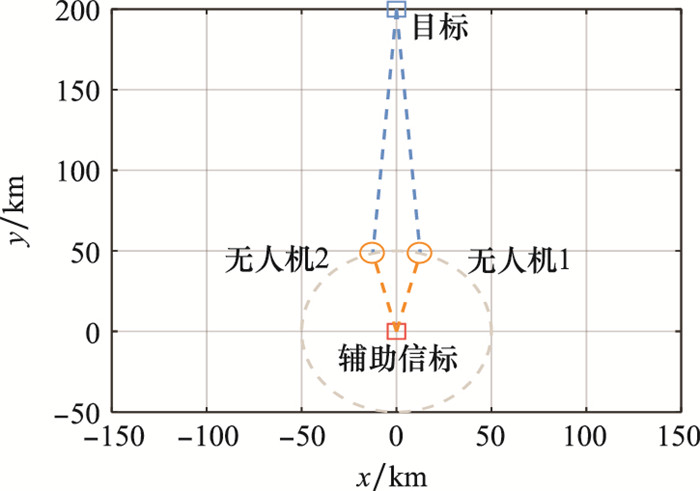
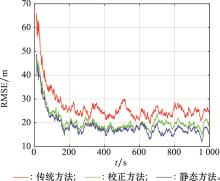
Fig.6
RMSE of target position through observation by twounmanned aerial vehicles"
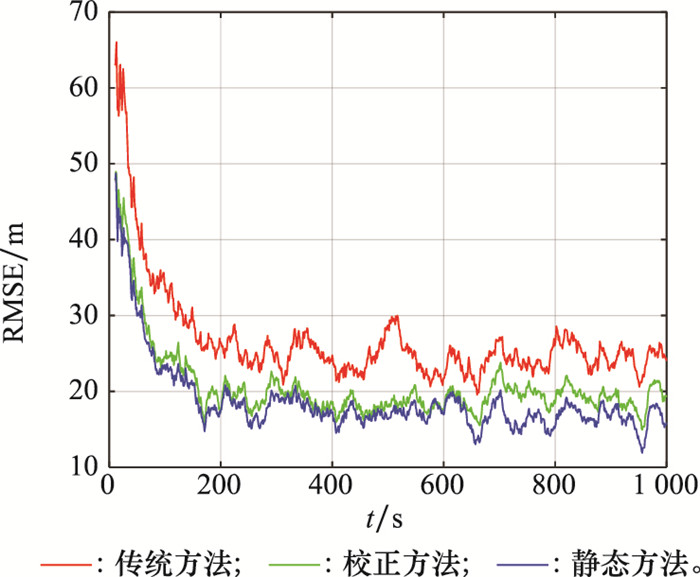
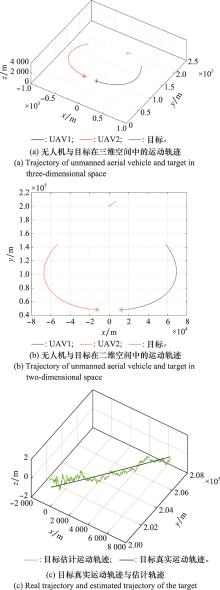
Fig.7
Trajectory of unmanned aerial vehicle and target"
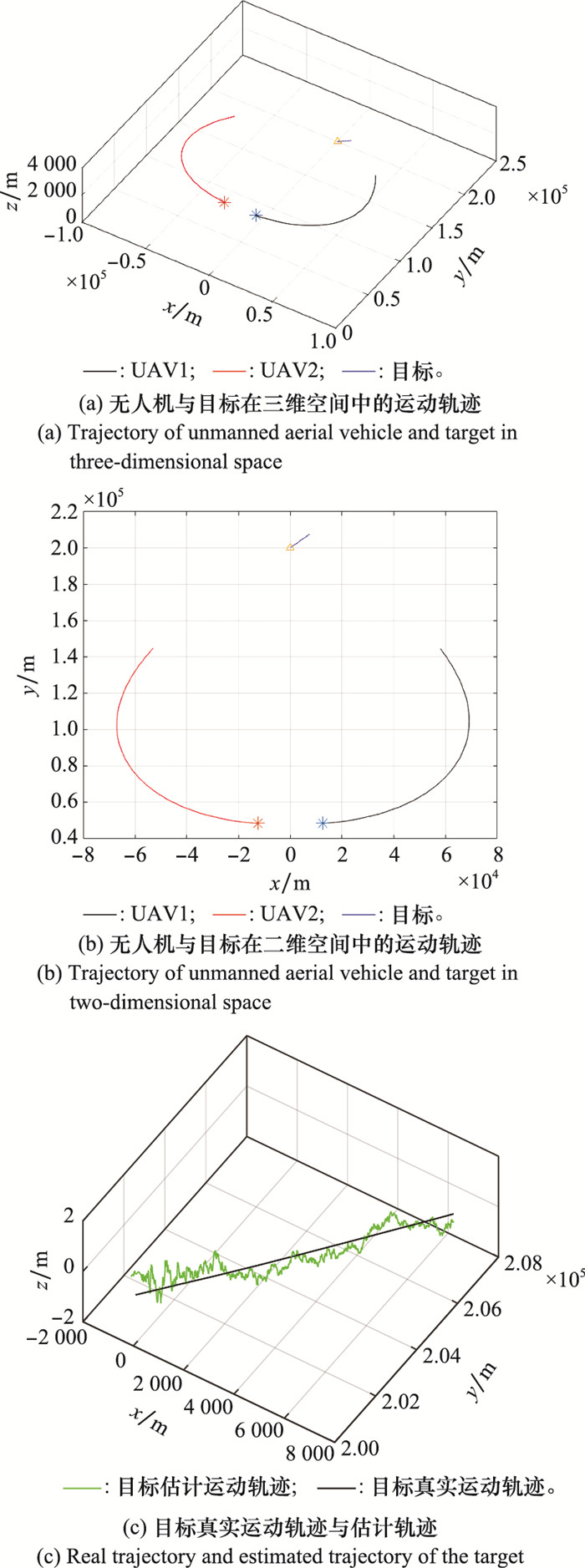

Fig.8
Distance and line of sight between unmanned aerial vehicle and target"
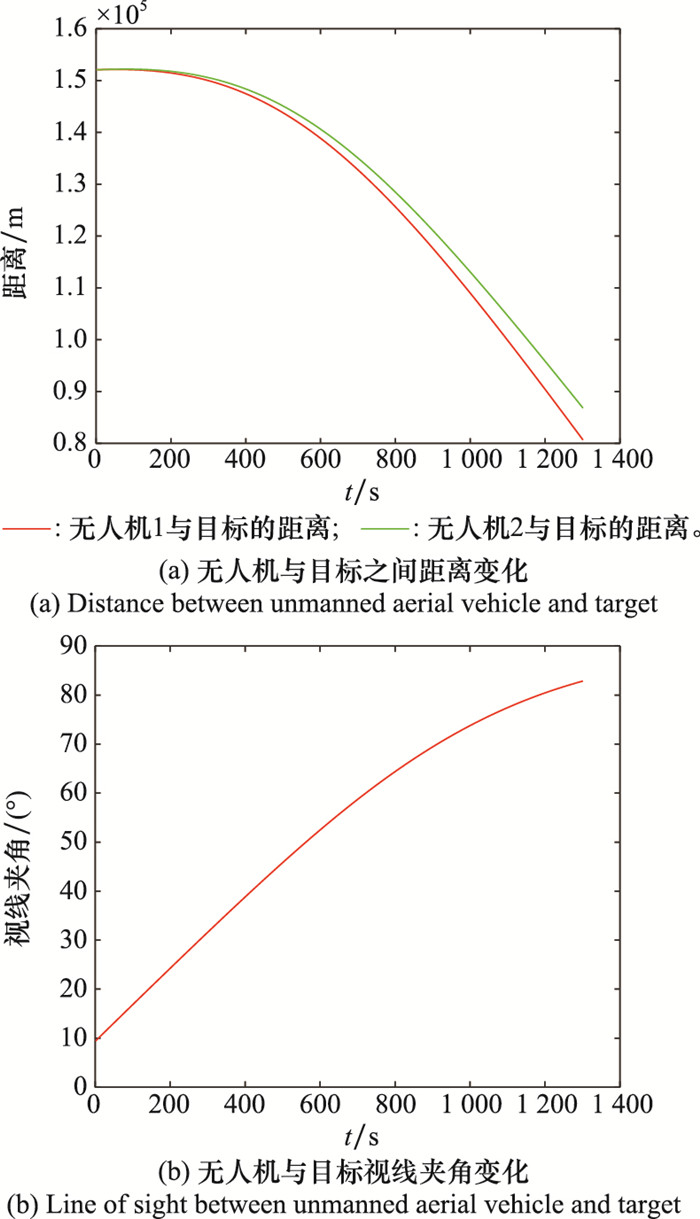
Fig.9
RMSE of target position when two unmanned aerial vehicles cooperate to observe"
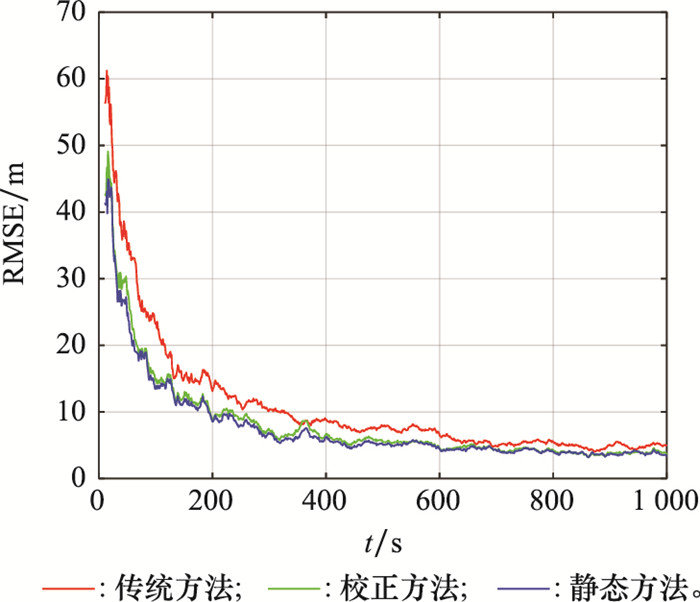
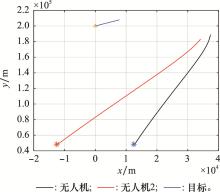
Fig.10
Unmanned aerial vehicle trajectories planned by Lyapunov guidance vector fields method"
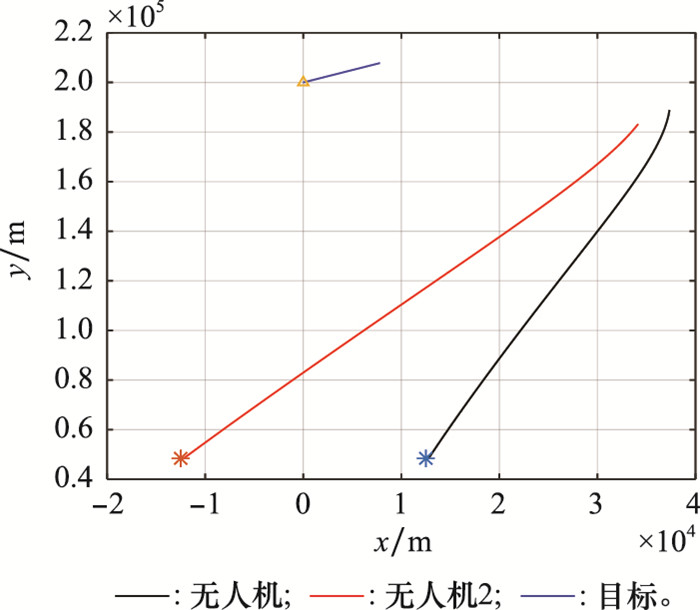
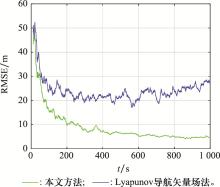
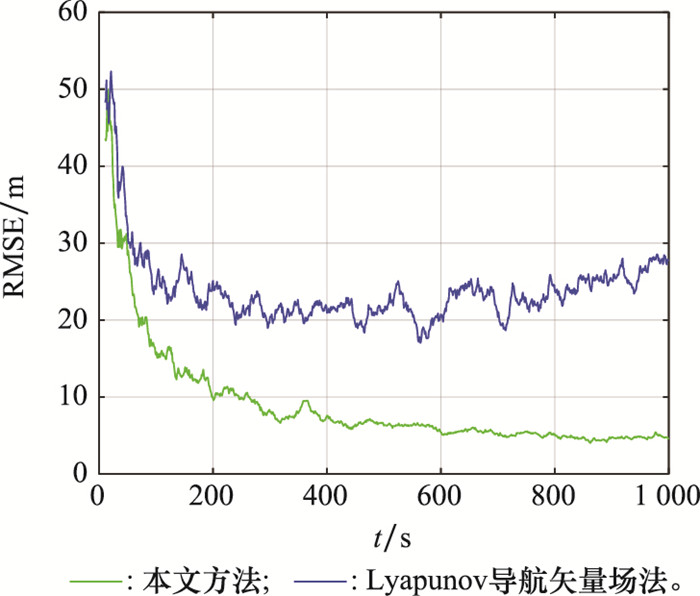
Fig.11
RMSE of through the proposed method and Lyapunov guidance vector fields method"
| 1 | 邵慧. 无人机高精度目标定位技术研究[D]. 南京: 南京航空航天大学, 2014. |
| SHAO H. Research on high precision target localization techno-logy in UAV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014. | |
| 2 |
LI J , WEI X G , ZHANG G J . An extended Kalman filter-based attitude tracking algorithm for star sensors[J]. Sensors, 2017, 17 (8): 1921.
doi: 10.3390/s17081921 |
| 3 | GARCIA R V , KUGA H K , ZANARDI M C . Unscented Kalman filter for spacecraft attitude estimation using modified Rodrigues parameters and real data[J]. Computational & Applied Mathematics, 2016, 35 (3): 835- 846. |
| 4 | 蔡安江, 刘凯峰, 郭师虹, 等. 基于四元数衍生无迹卡尔曼滤波的二段式多旋翼无人机姿态估计算法[J]. 控制理论与应用, 2020, 37 (2): 365- 373. |
| CAI A J , LIU K F , GUO S H , et al. Quaternion derivative unscented Kalman filter-based two-step attitude estimation algorithm for multi-rotor unmanned aerial vehicle[J]. Control Theory & Applications, 2020, 37 (2): 365- 373. | |
| 5 | HE S M , SHIN H S , TSOURDOS A . Trajectory optimization for multitarget tracking using joint probabilistic data association filter[J]. Journal of Guidance, Control, and Dynamics, 2019, 43 (1): 170- 178. |
| 6 |
ZHANG S , GUO Y , LU Z , et al. Cooperative detection based on the adaptive interacting multiple model-information filtering algorithm[J]. Aerospace Science and Technology, 2019, 93, 105310.
doi: 10.1016/j.ast.2019.105310 |
| 7 | ULUSKAN S . Noncausal trajectory optimization for real-time range-only target localization by multiple UAVs[J]. Aerospace Science and Technology, 2020, 99 (3): 105558. |
| 8 |
BISHOP A N , FIDAN B , ANDERSON B , et al. Optimality analysis of sensor-target localization geometries[J]. Automatica, 2010, 46 (3): 479- 492.
doi: 10.1016/j.automatica.2009.12.003 |
| 9 |
SONIA M , FRANCESCO B . Optimal sensor placement and motion coordination for target tracking[J]. Automatica, 2006, 42 (4): 661- 668.
doi: 10.1016/j.automatica.2005.12.018 |
| 10 | 王林. 多无人机协同目标跟踪问题建模与优化技术研究[D]. 长沙: 国防科学技术大学, 2011. |
| WANG L. Modeling and optimization for multi-UAVs coope-rative target tracking[D]. Changsha: National University of Defense Technology, 2011. | |
| 11 |
ZHAO S Y , CHEN B M , LEE T H . Optimal sensor placement for target localization and tracking in 2D and 3D[J]. International Journal of Control, 2013, 86 (10): 1687- 1704.
doi: 10.1080/00207179.2013.792606 |
| 12 | 孙海波, 周锐, 邹丽, 等. 通信和测量受限条件下异构多UAV分布式协同目标跟踪方法[J]. 航空学报, 2011, 32 (2): 299- 310. |
| SUN H B , ZHOU R , ZOU L , et al. Distributed cooperation target tracking for heterogeneous multi-UAV under communication and measurement constrains[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32 (2): 299- 310. | |
| 13 |
DI B , ZHOU R , DUAN H B . Potential field based receding horizon motion planning for centrality-aware multiple UAV cooperative surveillance[J]. Aerospace Science and Technology, 2015, 46, 386- 397.
doi: 10.1016/j.ast.2015.08.006 |
| 14 |
YAO P , WANG H L , JI H X . Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2016, 55, 131- 143.
doi: 10.1016/j.ast.2016.05.016 |
| 15 |
KIM S , OH H , TSOURDOS A . Nonlinear model predictive coordinated standoff tracking of a moving ground vehicle[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (2): 557- 566.
doi: 10.2514/1.56254 |
| 16 |
SONG Z X , LI H X , CHEN C L , et al. Coordinated standoff tracking of moving targets using differential geometry[J]. Journal of Zhejiang University-Science C, 2014, 15 (4): 284- 292.
doi: 10.1631/jzus.C1300287 |
| 17 |
KOKOLAKIS N , KOUSSOULAS N T . Robust standoff target tracking with finite-time phase separation under unknown wind[J]. Journal of Guidance, Control, and Dynamics, 2021, 44 (6): 1183- 1198.
doi: 10.2514/1.G005517 |
| 18 |
OUSINGSAWAT J , CAMPBELL M E . Optimal cooperative reconnaissance using multiple vehicles[J]. Journal of Gui-dance, Control, and Dynamics, 2007, 30 (1): 122- 132.
doi: 10.2514/1.19147 |
| 19 |
孙顺, 熊伟, 刘瑜, 等. 基于TDOA的多机协同闭环最优控制方法[J]. 电光与控制, 2019, 26 (3): 1- 7.
doi: 10.3969/j.issn.1671-637X.2019.03.001 |
|
SUN S , XIONG W , LIU Y , et al. A TDOA based closed-loop optimal control method for multiple UAVs[J]. Electronics Optics & Control, 2019, 26 (3): 1- 7.
doi: 10.3969/j.issn.1671-637X.2019.03.001 |
|
| 20 | 朱惠民, 贾正荣, 王航宇, 等. 针对不同视场辅助信标的无人机目标定位方法[J]. 国防科技大学学报, 2019, 41 (3): 125- 136. |
| ZHU H M , JIA Z R , WANG H Y , et al. Target location method of unmanned aerial vehicle direct at aided beacon in different field of view[J]. Journal of National University of Defense Technology, 2019, 41 (3): 125- 136. | |
| 21 | 刘重, 高晓光, 符小卫. 基于通信与观测联合优化的多无人机协同目标跟踪控制[J]. 控制与决策, 2018, 33 (10): 1747- 1756. |
| LIU C , GAO X G , FU X W . Co-optimization of communication and observation for multiple UAVs in cooperative target tracking[J]. Control and Decision, 2018, 33 (10): 1747- 1756. | |
| 22 |
HUNG N T , CRASTA N , MORENO S D , et al. Range-based target localization and pursuit with autonomous vehicles: an approach using posterior CRLB and model predictive control[J]. Robotics and Autonomous Systems, 2020, 132, 103608.
doi: 10.1016/j.robot.2020.103608 |
| 23 |
XU S . Optimal sensor placement for target localization using hybrid RSS, AOA and TOA measurements[J]. IEEE Communications Letters, 2020, 24 (9): 1966- 1970.
doi: 10.1109/LCOMM.2020.2996259 |
| 24 |
SHI H R , LU F X , WANG H Y , et al. Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space[J]. Journal of Systems Engineering and Electronics, 2020, 31 (5): 996- 1008.
doi: 10.23919/JSEE.2020.000074 |
| 25 |
钟春梅, 赵振宇, 孙海波, 等. 多无人机协同目标跟踪闭环最优控制方法[J]. 探测与控制学报, 2012, 34 (3): 13- 18.
doi: 10.3969/j.issn.1008-1194.2012.03.003 |
|
ZHONG C M , ZHAO Z Y , SUN H B , et al. A closed-loop optimal control for multiple unmanned aerial vehicles cooperative target tracking[J]. Journal of Detection & Control, 2012, 34 (3): 13- 18.
doi: 10.3969/j.issn.1008-1194.2012.03.003 |
|
| 26 |
IENKARAN A , SIMON H . Cubature Kalman filters[J]. IEEE Trans.on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 27 | 丁家琳, 肖建, 张勇. 基于CKF的分布式滤波算法及其在目标跟踪中的应用[J]. 控制与决策, 2015, 30 (2): 296- 302. |
| DING J L , XIAO J , ZHANG Y . Distributed algorithm-based CKF and its applications to target tracking[J]. Control and Decision, 2015, 30 (2): 296- 302. | |
| 28 | SANTOSL J , ORIVE R , ACOSTA D , et al. The cubature Kalman filter revisited[J]. Automatica, 2021, 127 (6): 109541. |
| 29 | WANG D , HUANG D , XU C , et al. A closed-form method for simultaneous target localization and UAV trajectory optimization[J]. Applied Sciences, 2021, 11 (1): 114. |
| 30 |
LAWRENCE D A , FREW E , PISANO W . Lyapunov vector fields for autonomous UAV flight control[J]. Journal of Gui-dance, Control, and Dynamics, 2008, 31 (5): 1220- 1229.
doi: 10.2514/1.34896 |
| 31 | YAO P , WANG H L , SU Z K . Cooperative path planning with applications to target tracking and obstacle avoidance for multi-UAVs[J]. Aerospace Science and Technology, 2016, 54 (6): 10- 22. |
| [1] | Zhuling QIU, Yufei ZHA, Zhenyu LI, Yuming LI, Peng ZHANG, Chuan ZHU. Temporal regularized correlation filter tracking algorithm based on multi-model distillation [J]. Systems Engineering and Electronics, 2022, 44(8): 2448-2456. |
| [2] | Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking [J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482. |
| [3] | Shuai WANG, Jianjun XIANG, Fang PENG, Shujuan TANG. Target tracking algorithm based on a new steepest descent method [J]. Systems Engineering and Electronics, 2022, 44(5): 1512-1519. |
| [4] | Huaisheng XIN, Chen CAO. Interacting multiple model based grouping δ-generalized labeledmulti-Bernoulli algorithm [J]. Systems Engineering and Electronics, 2022, 44(4): 1128-1138. |
| [5] | Jiahao XIE, Shucai HUANG, Daozhi WEI, Zhaoyu ZHANG, Wenhao WANG. Solution for uncertain hybrid multi-sensor alliance based on PEV principle [J]. Systems Engineering and Electronics, 2022, 44(3): 819-826. |
| [6] | Tengafei ZHANG, Chunlin GONG, Hua SU, Pengfei XUE. Trajectory optimization based on heat-augmented model and analysis of thermal protection structure [J]. Systems Engineering and Electronics, 2022, 44(3): 929-938. |
| [7] | Zizhuang SONG, Jiawei YANG, Dongfang ZHANG, Shiqiang WANG, Shuo ZHANG. Real-time infrared multi-class multi-target anchor-free tracking network [J]. Systems Engineering and Electronics, 2022, 44(2): 401-409. |
| [8] | Huaisheng XIN, Penghan SONG, Chen CAO. Multiple model based generalized labeled multi-Bernoulli filter [J]. Systems Engineering and Electronics, 2022, 44(12): 3603-3613. |
| [9] | Haonan LIU, Liping SONG. Group structure update model and group target tracking algorithm based on kernel Fisher discriminant [J]. Systems Engineering and Electronics, 2022, 44(10): 3012-3019. |
| [10] | Cheng FANG, Wen LU, Jingying JI, Yumeng SONG, Feifei LIANG, Zhiwei LUO. Correlation filter-tracking algorithm based on appearance similarity update [J]. Systems Engineering and Electronics, 2022, 44(1): 117-126. |
| [11] | Caihong YUE, Shengjing TANG, Jie GUO, Xiao WANG, Haoqiang ZHANG. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle [J]. Systems Engineering and Electronics, 2021, 43(8): 2232-2243. |
| [12] | Yuexin ZHAO, Wangdong QI, Peng LIU, En YUAN, Bing XU. Quadratic constraint Kalman filter algorithm for three dimensional AoA target tracking [J]. Systems Engineering and Electronics, 2021, 43(8): 2263-2272. |
| [13] | Mingjie SUN, Lin ZHOU, Jinling GU, Peigeng LI. Infrared target tracking algorithm based on multi-domain network [J]. Systems Engineering and Electronics, 2021, 43(5): 1176-1183. |
| [14] | Yu LU, Haibin WANG. Maneuvering target tracking algorithm for airborne passive coherent localization system [J]. Systems Engineering and Electronics, 2021, 43(4): 875-882. |
| [15] | Weishi CHEN, Yifeng HUANG, Xiaolong CHEN, Xianfeng LU, Jie ZHANG. Low-altitude target classification based on model conversion frequency estimation [J]. Systems Engineering and Electronics, 2021, 43(4): 927-936. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||