Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (8): 2474-2482.doi: 10.12305/j.issn.1001-506X.2022.08.11
• Sensors and Signal Processing • Previous Articles Next Articles
GMPHD based on measurement conversion sequential filtering for maneuvering target tracking
Zilin HOU, Ting CHENG*, Han PENG
- School of Information and Communication Engineering, University of Electronic Science and Technology of China, Chengdu 611731, China
-
Received:2021-05-28Online:2022-08-01Published:2022-08-24 -
Contact:Ting CHENG
CLC Number:
Cite this article
Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking[J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482.
share this article

Fig.1
Diagram of DUCM-SQ-MM-GMPHD algorithm"
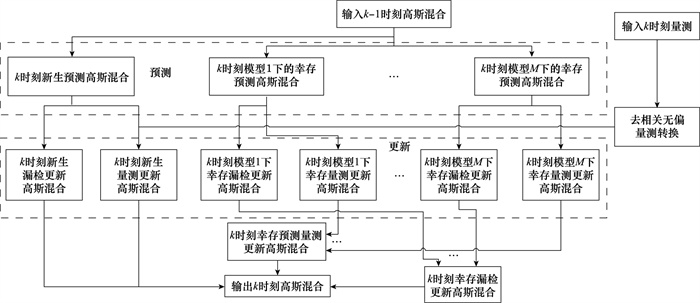
Table 1
Target motion scene"
| 目标 | 出现时刻/s | 出现位置/m | 消失时刻/s | 机动 |
| 1 | 1 | [50, 200] | 100 | 1~100 s匀速 |
| 2 | 31 | [100, 250] | 70 | 31~40 s匀速, 41~60 s匀速左转弯, 61~70 s匀速 |
| 3 | 11 | [150, 350] | 90 | 11~30 s匀速, 31~60 s匀速右转弯, 61~90 s匀速 |
| 4 | 21 | [300, 250] | 80 | 21~80 s匀速左转弯 |
Fig.2
Target track and measurement distribution"
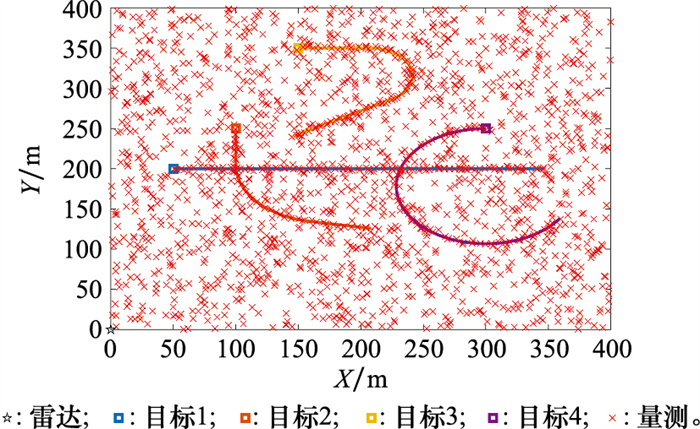
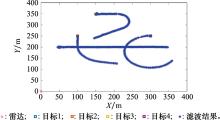
Fig.3
Tracking result of DUCM-SQ-MM-GMPHD"
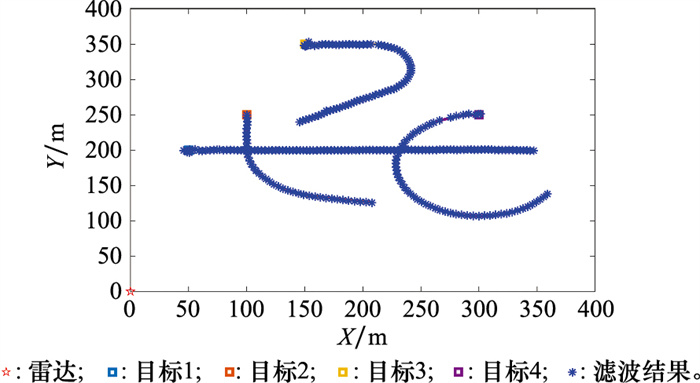
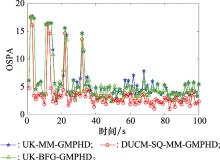
Fig.4
Statistical averaged OSP A distance"
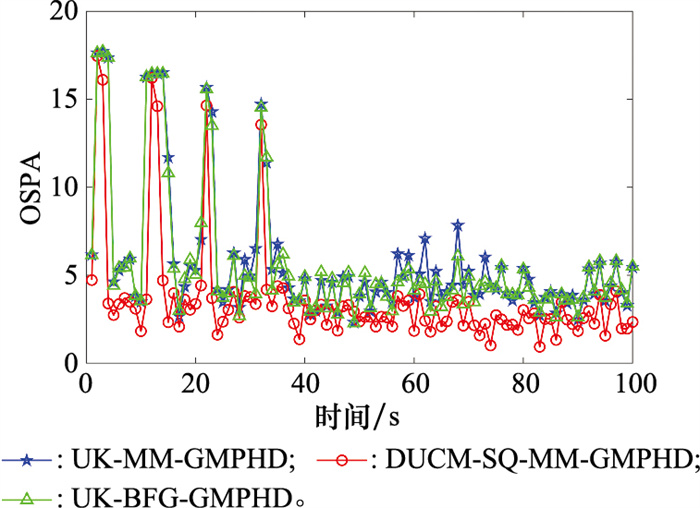
Fig.5
Statistical averaged number estimation of targets"
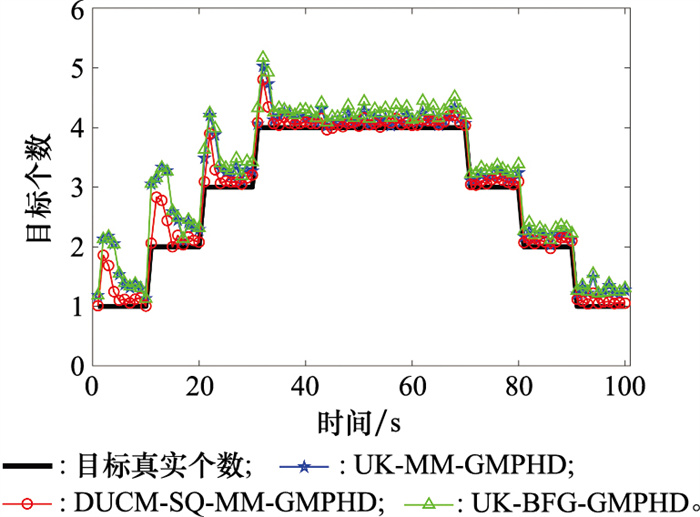
Fig.6
Statistical averaged algorithm running time"
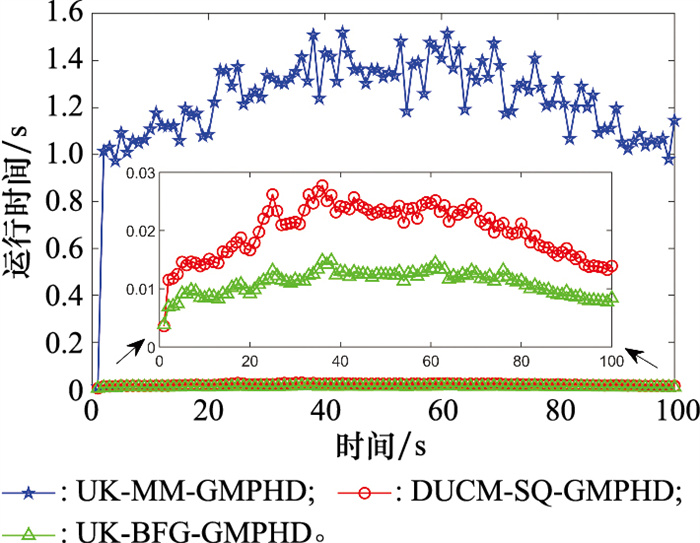
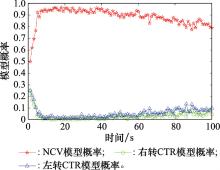
Fig.7
Statistical averaged probability of models of Target 1"
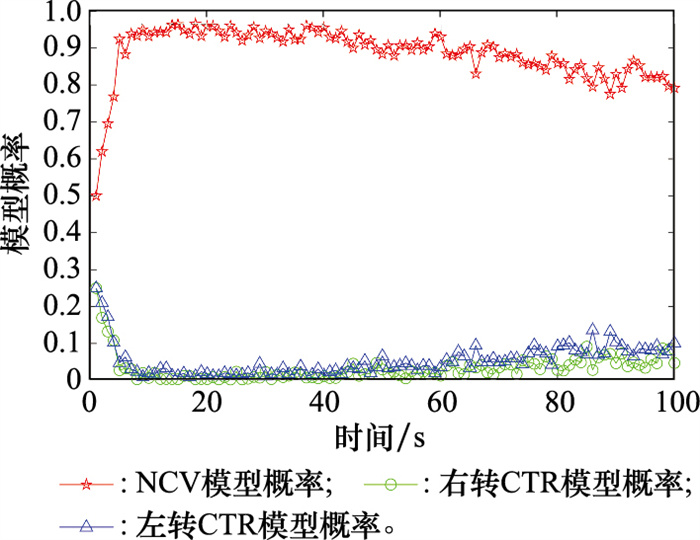
Fig.8
Statistical averaged probability of models of Target 2"
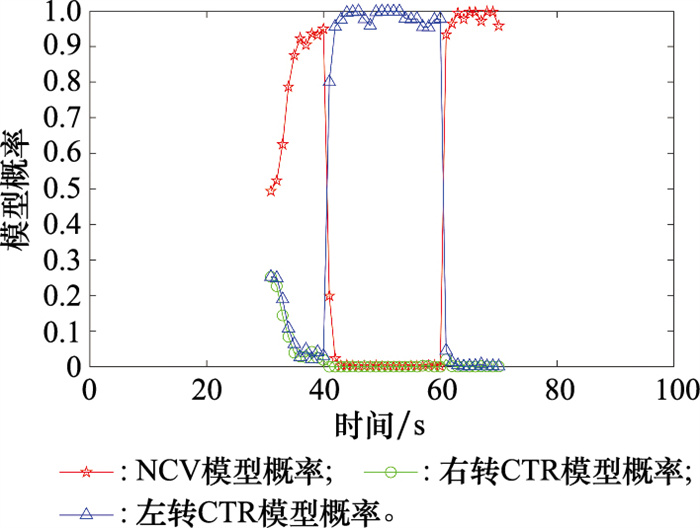
Fig.9
Statistical averaged probability of models of Target 3"
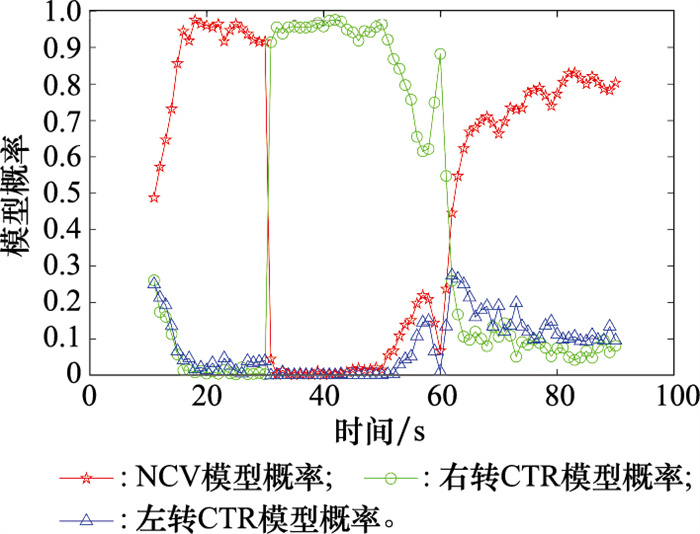
Fig.10
Statistical averaged probability of models of Target 4"
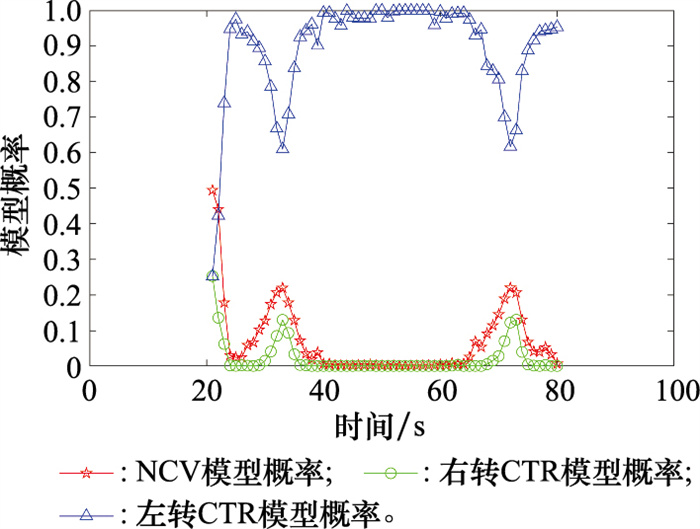
Table 2
OSPA improvement of DUCM-SQ-MM-GMPHD in comparison with UK-MM-GMPHD and UK-BFG-GMPHD under different parameters"
| 滤波改变参数 | UK-MM-GMPHD/% | UK-BFG-GMPHD/% |
| λ=0.5×10-4/m2 | 36.99 | 36.71 |
| λ=2×10-4/m2 | 40.36 | 38.88 |
| Pd=0.79 | 64.61 | 38.24 |
| Pd=0.89 | 55.47 | 41.15 |
| Ps=0.79 | 39.86 | 38.45 |
| Ps0.89 | 42.08 | 36.29 |
| 1 | MUSICKI D, SCALA B, EVANS R J. Multi-target tracking in clutter without measurement assignment[C]//Proc. of the IEEE Conference on Decision and Control, 2005. |
| 2 | BAR-SHALOM Y , FORTMAN T E . Tracking and data association[M]. Amsterdam: Elsvier Science, 1988. |
| 3 |
KIRUBARAJAN T , BAR-SHALOM Y . Probabilistic data association techniques for target tracking in clutter[J]. Proceedings of the IEEE, 2004, 92 (3): 536- 557.
doi: 10.1109/JPROC.2003.823149 |
| 4 | BAR-SHALOM Y , DAUM F , HUANG J . The probabilistic data association filter[J]. IEEE Control Systems, 2010, 29 (6): 82- 100. |
| 5 | BLOM H, BLOEM E A. Combining IMM and JPDA for tracking multiple maneuvering targets in clutter[C]//Proc. of the 5th IEEE International Conference on Information Fusion, 2002. |
| 6 | FORTMANN T , BAR-SHALOM Y , SCHEFFE M . Sonar tracking of multiple targets using joint probabilistic data association[J]. IEEE Journal of Oceanic Engineering, 2003, 8 (3): 173- 184. |
| 7 | MAHLER R . Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Trans.on Aerospace & Electronic Systems, 2004, 39 (4): 1152- 1178. |
| 8 | VO B N, MA W K. A closed-form solution for the probability hypothesis density filter[C]//Proc. of the IEEE 8th International Conference on Information Fusion, 2005. |
| 9 |
VO B N , SINGH S , DOUCET A . Sequential Monte Carlo methods for multi-target filtering with random finite sets[J]. IEEE Trans.on Aerospace and Electronic Systems, 2005, 41 (4): 1224- 1245.
doi: 10.1109/TAES.2005.1561884 |
| 10 |
VO B N , MA W K . The Gaussian mixture probability hypothesis density filter[J]. IEEE Trans.on Signal Processing, 2006, 54 (11): 4091- 4104.
doi: 10.1109/TSP.2006.881190 |
| 11 | KOLAWOLE M O. Estimation and tracking[M]//Radar Systems, Peak Detection and Tracking, 2002: 287. |
| 12 |
JULIER S J . Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92 (3): 401- 422.
doi: 10.1109/JPROC.2003.823141 |
| 13 | BORDONARO S V , WILLETT P , BAR-SHALOM Y . Tracking with converted position and Doppler measurements[J]. Proceedings of SPIE, 2011, |
| 14 | MO L B , SONG X Q , ZHOU Y Y , et al. Unbiased converted measurements for tracking[J]. IEEE Trans.on Aerospace & Electronic Systems, 1998, 34 (3): 1023- 1027. |
| 15 | DUAN Z S , HAN C Z , LI X R . Comments on unbiased converted measurements for tracking[J]. IEEE Trans.on Aerospace & Electronic Systems, 2004, 40 (4): 1374. |
| 16 |
BORDONARO S , WILLETT P , BAR-SHALOM Y . Decorrelated unbiased converted measurement Kalman filter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2014, 50 (2): 1431- 1444.
doi: 10.1109/TAES.2014.120563 |
| 17 | NOUSHIN A J, NELSON K D. Radar data processing[P]. U. S: USO8681038B1, 2014. |
| 18 |
王建国, 龙腾, 何佩琨. 一种在Kalman滤波中引入径向速度测量的新方法[J]. 信号处理, 2002, 18 (5): 414- 416.414-416, 409
doi: 10.3969/j.issn.1003-0530.2002.05.006 |
|
WANG J G , LONG T , HE P K . A new method of incorporating radial velocity measurement into Kalman filter[J]. Signal Processing, 2002, 18 (5): 414- 416.414-416, 409
doi: 10.3969/j.issn.1003-0530.2002.05.006 |
|
| 19 |
段战胜, 韩崇昭. 极坐标系中带多普勒量测的雷达目标跟踪[J]. 系统仿真学报, 2004, 16 (12): 2860- 2863.
doi: 10.3969/j.issn.1004-731X.2004.12.064 |
|
DUAN Z S , HAN C Z . Radar target tracking with Doppler measurements in polar coordinates[J]. Acta Simulata Systematica Sinica, 2004, 16 (12): 2860- 2863.
doi: 10.3969/j.issn.1004-731X.2004.12.064 |
|
| 20 | 彭瀚, 程婷. 基于预测信息的量测转换序贯滤波目标跟踪[J]. 系统工程与电子技术, 2019, 41 (3): 90- 95. |
| PENG H , CHENG T . Sequential filtering for target tracking based on the prediction position conditioned measurement conversion[J]. Systems Engineering and Electronics, 2019, 41 (3): 90- 95. | |
| 21 | LI X R , JILKOV V P . Survey of maneuvering target tracking. part V. multiple-model methods[J]. IEEE Trans.on Aerospace & Electronic Systems, 2005, 41 (4): 1255- 1321. |
| 22 | BAR-SHALOM Y , CHANG K C . Tracking a maneuvering target using input estimation versus the interacting multiple model algorithm[J]. IEEE Trans.on Aerospace & Electronic Systems, 1989, 25 (2): 296- 300. |
| 23 |
HERNANDEZ M , RISTIC B , FARINA A , et al. Performance measure for Markovian switching systems using best-fitting Gaussian distributions[J]. IEEE Trans.on Aerospace and Electronic Systems, 2008, 44 (2): 724- 747.
doi: 10.1109/TAES.2008.4560217 |
| 24 | PUNITHAKUMAR K , KIRUBARAJAN T , SINHA A . Multiple-model probability hypothesis density filter for tracking maneuvering targets[J]. IEEE Trans.on Aerospace & Electronic Systems, 20008, 44 (1): 87- 98. |
| 25 | PASHA S A , VO B N , TUAN H D , et al. A Gaussian mixture PHD filter for jump markov system models[J]. IEEE Trans.on Aerospace & Electronic Systems, 2009, 45 (3): 919- 936. |
| 26 | MELZI M, OULDALI A, MESSAOUDI Z. Multiple target tracking and classification using the unscented probability hypothesis density filter[C]//Proc. of the International Workshop on Systems, Signal Processing and their Applications, 2011: 21-24. |
| 27 |
LI W L , JIA Y M . Gaussian mixture PHD filter for jump Markov models based on best-fitting Gaussian approximation[J]. Signal Processing, 2011, 91 (4): 1036- 1042.
doi: 10.1016/j.sigpro.2010.08.004 |
| 28 | DUAN Z, HAN C, LI X R. Sequential nonlinear tracking filter with range-rate measurements in spherical coordinates[C]//Proc. of the 7th International Conference on Information Fusion, 2004: 599-605. |
| 29 | BAR-SHALOM Y , KIRUBARAJAN T , LI X R . Estimation with applications to tracking and navigation[M]. New York: Wiley, 2001. |
| 30 | SCHUHMACHER D, BA T V, BA N V. On performance evaluation of multi-object filters[C]//Proc. of the 11th International Conference on Information Fusion, 2008. |
| [1] | Xinmin TANG, Pengcheng ZHENG. IMM aircraft short-term track extrapolation based on geodetic coordinate system [J]. Systems Engineering and Electronics, 2022, 44(7): 2293-2301. |
| [2] | Shuai WANG, Jianjun XIANG, Fang PENG, Shujuan TANG. Target tracking algorithm based on a new steepest descent method [J]. Systems Engineering and Electronics, 2022, 44(5): 1512-1519. |
| [3] | Junbiao ZHANG, Jiajun XIONG, Xuhui LAN, Fan LI, Wenjian LIU, Qiushi XI. 3D tracking algorithm of hypersonic gliding target based on adaptive filtering [J]. Systems Engineering and Electronics, 2022, 44(2): 628-636. |
| [4] | Huaisheng XIN, Penghan SONG, Chen CAO. Multiple model based generalized labeled multi-Bernoulli filter [J]. Systems Engineering and Electronics, 2022, 44(12): 3603-3613. |
| [5] | Yu LU, Haibin WANG. Maneuvering target tracking algorithm for airborne passive coherent localization system [J]. Systems Engineering and Electronics, 2021, 43(4): 875-882. |
| [6] | Juqi YIN, Zhen YANG, Yazhong LUO, Jianyong ZHOU. Improved adaptive IMM algorithm for space maneuvering target tracking [J]. Systems Engineering and Electronics, 2021, 43(12): 3658-3666. |
| [7] | Xing CHEN, Zhanwu LI, An XU, Xiaodong HU. VSMM algorithm based on target maneuver pattern recognition [J]. Systems Engineering and Electronics, 2020, 42(5): 999-1006. |
| [8] | LIU Dai, ZHAO Yongbo, ZHOU Yongwei, CHEN Mingzhe, LI Wei. Maneuvering target tracking algorithm aided by a high resolution range profile [J]. Systems Engineering and Electronics, 2019, 41(9): 1967-1972. |
| [9] | TANG Weiqiang, LONG Wenkun, SUN Lijuan, HUANG Xiaoli. Multiple model adaptive control of nonlinear systems based on clustering method and neural network [J]. Systems Engineering and Electronics, 2019, 41(9): 2100-2106. |
| [10] | ZHANG Haowei, XIE Junwei, GE Jiaang, ZONG Binfeng, LU Wenlong. Strong tracking squareroot cubature Kalman filter overadaptive current statistical model [J]. Systems Engineering and Electronics, 2019, 41(6): 1186-1194. |
| [11] | PENG Han, CHENG Ting. Sequential filtering for target tracking based on the prediction position conditioned measurement conversion [J]. Systems Engineering and Electronics, 2019, 41(3): 549-554. |
| [12] | LI Bo, LI Qingying, GAO Xiaoguang, ZHANG Chunyan. Radar radiation control under multiple sensor synergy based on ordinal optimization [J]. Systems Engineering and Electronics, 2018, 40(7): 1465-1471. |
| [13] | XU Bo, LIU Dezheng, ZHANG Xun. Multiple AUV cooperative navigation algorithm of robust filter based on interacting model [J]. Systems Engineering and Electronics, 2017, 39(9): 2087-2093. |
| [14] |
SUN Yang, ZHENG Nae, LI Yuxiang, REN Xiukun.
Distributed MIMO radar resource allocation approach for target tracking [J]. Systems Engineering and Electronics, 2017, 39(8): 1744-1750. |
| [15] | QIN Lei, ZHOU Di, LI Junlong. Tracking filter for nonballistic near space targets based on MVSIMM algorithm [J]. Systems Engineering and Electronics, 2017, 39(7): 1582-1589. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||