Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (12): 3658-3666.doi: 10.12305/j.issn.1001-506X.2021.12.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Improved adaptive IMM algorithm for space maneuvering target tracking
Juqi YIN, Zhen YANG*, Yazhong LUO, Jianyong ZHOU
- College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China
-
Received:2021-01-05Online:2021-11-24Published:2021-11-30 -
Contact:Zhen YANG
CLC Number:
Cite this article
Juqi YIN, Zhen YANG, Yazhong LUO, Jianyong ZHOU. Improved adaptive IMM algorithm for space maneuvering target tracking[J]. Systems Engineering and Electronics, 2021, 43(12): 3658-3666.
share this article
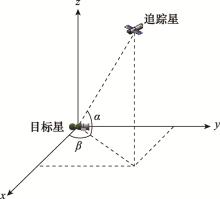
Fig.1
Observation coordinate system"
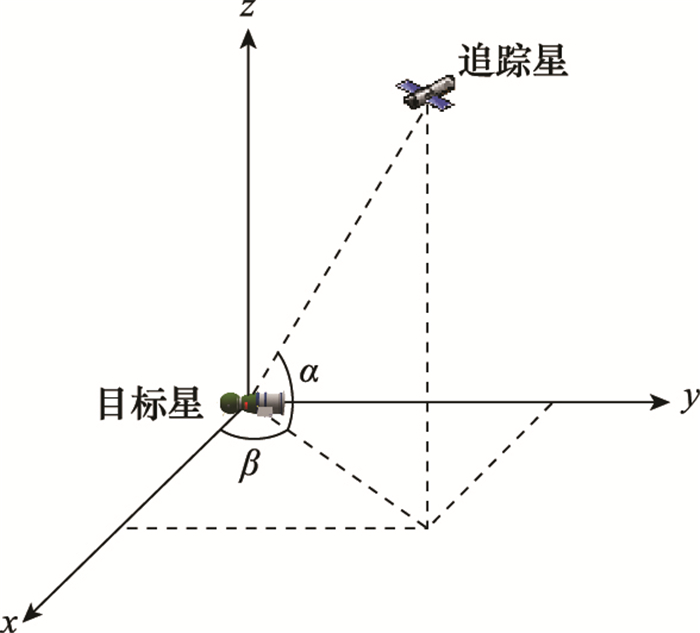
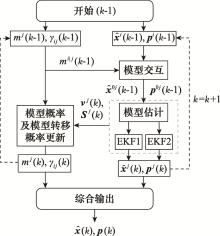
Fig.2
Diagram of adaptive correction algorithm for model transition probability"
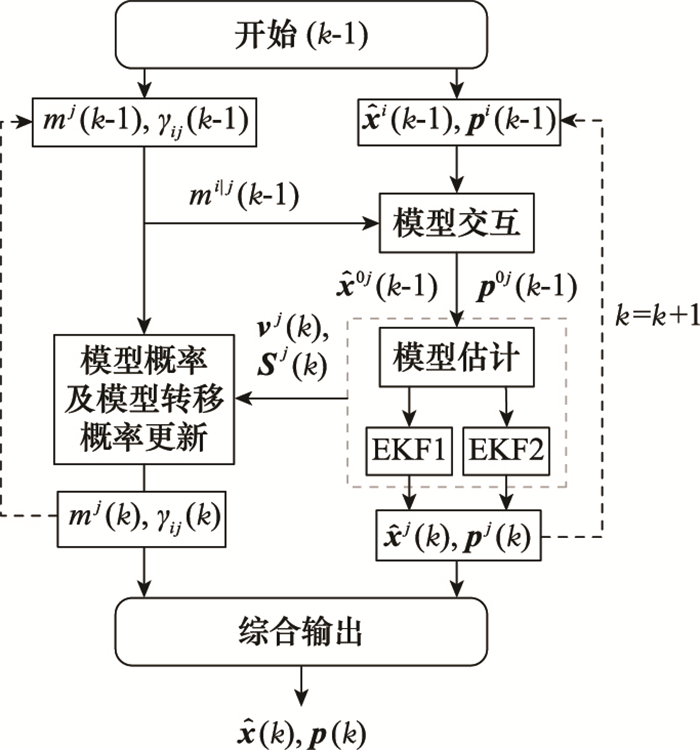

Fig.3
Simulation scenario"
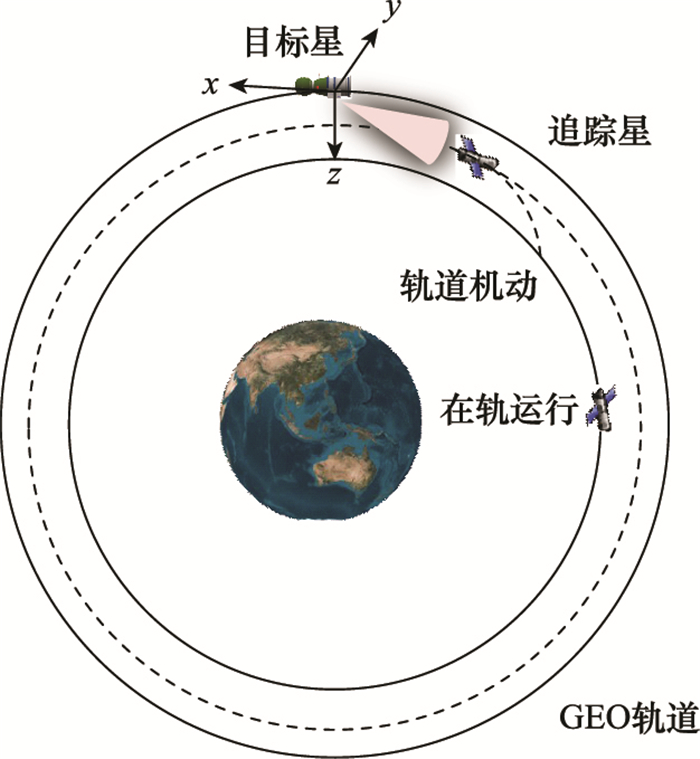
Table 1
Initial orbit elements of target satellite"
| 半长轴/km | 偏心率 | 轨道倾角/(°) | 升交点赤经/(°) | 近地点角距/(°) | 真近点角/(°) |
| 42 165.14 | 0.100 2 | 1.37 | 359.12 | -113.12 | 184.52 |
Fig.4
Change of model likelihood function before transforming"
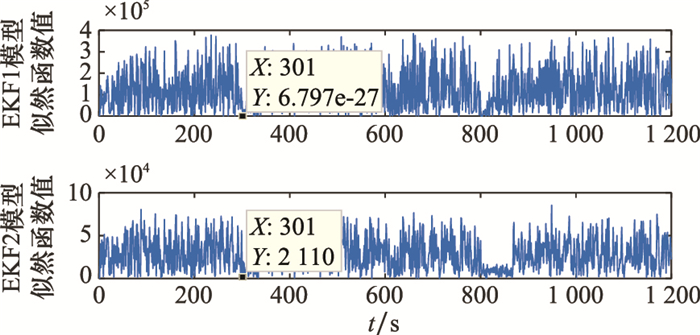
Fig.5
Change of model likelihood function after transforming"
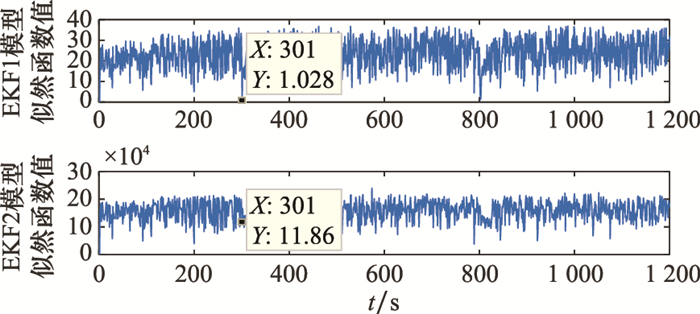
Table 2
Impact of different η on the tracking performance of IMM-EKF method"
| η取值 | 位置平均误差/m | 速度平均误差/(m/s) | 机动后开始及收敛时刻/s |
| 0.010 | 23.522 | 2.446 | 304; 801 |
| 0.050 | 16.189 | 1.014 | 304; 804 |
| 0.100 | 12.551 | 0.586 | 304; 804 |
| 0.125 | 12.444 | 0.519 | 305; 807 |
| 0.200 | 11.586 | 0.482 | 306; 810 |
| 0.300 | — | — | — |
| 1.000 | — | — | — |
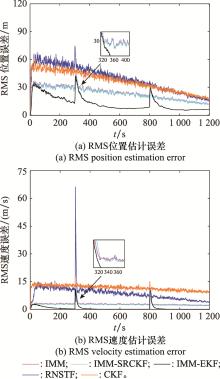
Fig.6
Comparative analysis of RMS error without considering rate measurement"
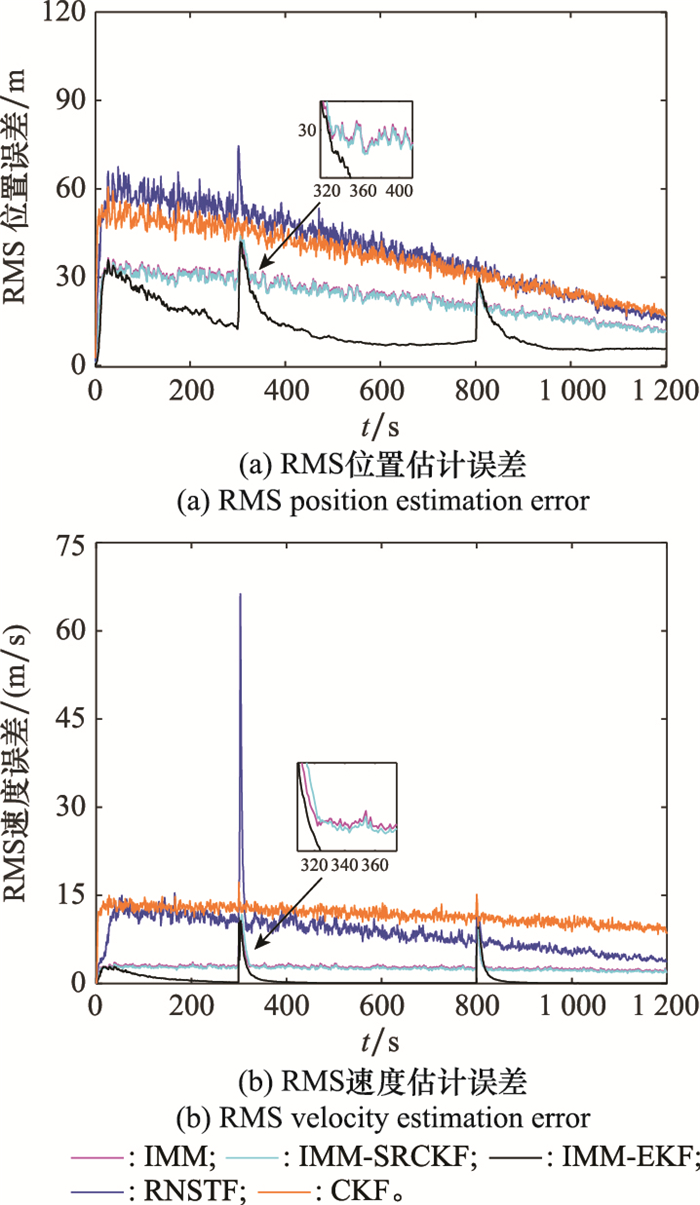
Table 3
Comparison of tracking performance of algorithm without considering rate measurement"
| 算法类型 | 平均误差 | 最大峰值误差 | 滤波结束时刻估计误差 | |||||
| 位置/m | 速度/(m/s) | 位置/m | 速度/(m/s) | 位置/m | 速度/(m/s) | |||
| RNSTF | 39.365 | 8.601 | 74.624 | 66.294 | 15.180 | 3.661 | ||
| CKF | 36.326 | 11.679 | 60.741 | 16.995 | 16.719 | 8.469 | ||
| IMM | 23.400 | 2.787 | 42.536 | 11.561 | 11.784 | 2.037 | ||
| IMM-SRCKF | 23.005 | 2.619 | 44.814 | 11.540 | 11.661 | 1.903 | ||
| IMM-EKF | 11.946 | 0.571 | 39.962 | 11.247 | 5.704 | 0.049 | ||

Fig.7
Change of model probability of IMM-EKF"
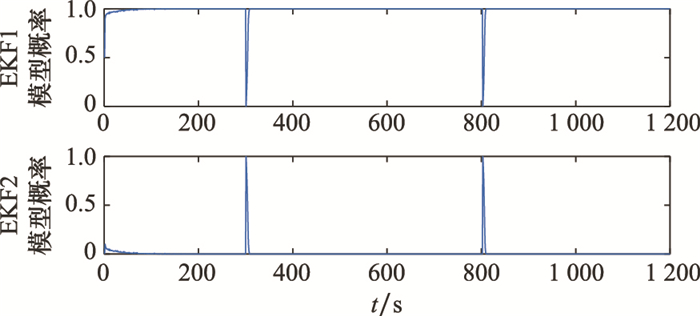

Fig.8
Comparative analysis of multi-model RMS error considering rate measurement"
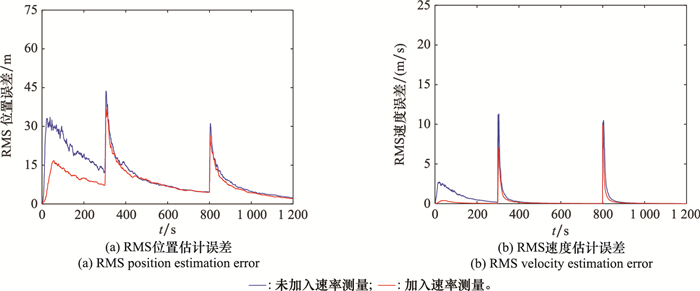
Table 4
Impact of rate measurement on tracking performance of IMM-EKF method"
| 算法类型 | 平均误差 | 最大峰值误差 | 滤波结束时刻估计误差 | |||||
| 位置/m | 速度/(m/s) | 位置/m | 速度/(m/s) | 位置/m | 速度/(m/s) | |||
| 未加入速率测量 | 11.946 | 0.571 | 39.962 | 11.247 | 2.843 | 0.015 | ||
| 加入速率测量 | 8.641 | 0.228 | 37.055 | 9.930 | 2.112 | 0.010 | ||
| 1 | SpaceX Official Website. Starlink mission[EB/OL]. [2021-01-03]. https://www.spacex.com/updates/starlink-mission-01-20-2021/index.html. |
| 2 | HENRI Y. The OneWeb satellite system[EB/OL]. [2021-01-03]. https://doi.org/10.1007/978-3-030-20707-6_07-1. |
| 3 | LAL B, BALAKRISHNAN A, CALDWE-LL B M, et al. Global trends in space situational awareness (SSA) and space traffic management (STM)[EB/OL]. [2021-01-03]. https://www.ida.org/idamedia/Corporate/Files/Publications/STPIPubs/2018/D-9074.pdf, 2018. |
| 4 | U.S. Department of Defense. National security space strategy unclassified summary[R]. Arlington: Department of Defense, 2011. |
| 5 |
VERSPIEREN Q . The united states department of defense space situational awareness sharing program: origins, development and drive towards transparency[J]. Journal of Space Safety Engineering, 2021, 8 (1): 86- 92.
doi: 10.1016/j.jsse.2020.10.001 |
| 6 | 李皓皓, 张进, 罗亚中. 基于机动目标滤波估计的航天器主动规避策略[J]. 力学学报, 2020, 52 (6): 1560- 1568. |
| LI H H , ZHANG J , LUO Y Z . Spacecraft evasion strategy using active maneuvers based on maneuvering-target acceleration estimation[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52 (6): 1560- 1568. | |
| 7 | 张洪波. 航天器轨道力学理论与方法[M]. 北京: 国防工业出版社, 2015. |
| ZHANG H B . Theories and methods of spacecraft orbital mechanics[M]. Beijing: National Defense Industry Press, 2015. | |
| 8 |
FITZGERALD R . Divergence of the Kalman filter[J]. IEEE Trans.on Automatic Control, 1971, 16 (6): 736- 747.
doi: 10.1109/TAC.1971.1099836 |
| 9 |
周东华, 席裕庚, 张钟俊. 非线性系统带次优渐消因子的扩展卡尔曼滤波[J]. 控制与决策, 1990, 5 (5): 1- 6.
doi: 10.3321/j.issn:1001-0920.1990.05.002 |
|
ZHOU D H , XI Y G , ZHANG Z J . Suboptimal fading extended Kalman filtering for nonlinear systems[J]. Control and Decision, 1990, 5 (5): 1- 6.
doi: 10.3321/j.issn:1001-0920.1990.05.002 |
|
| 10 |
JIANG Y Z , MA P B , BAOYIN H X . Residual-normalized strong tracking filter for tracking a noncoopertive maneuvering spacecraft[J]. Journal of Guidance, Control, and Dynamics, 2019, 42 (10): 2304- 2309.
doi: 10.2514/1.G004347 |
| 11 |
BLOM H A P , BAR-SHALOM Y . The interacting multiple model algorithm for systems with Markovian switching coefficients[J]. IEEE Trans.on Automatic Control, 1988, 33 (8): 780- 783.
doi: 10.1109/9.1299 |
| 12 |
LI X R , JILKOV V P . Survey of maneuvering target tracking, Part V: multiple-model methods[J]. IEEE Trans.on Aerospace and Electronic Systems, 2005, 41 (4): 1255- 1321.
doi: 10.1109/TAES.2005.1561886 |
| 13 |
LIU H , WU W . Interacting multiple model (IMM) fifth-degree spherical simplex-radial cubature Kalman filter for maneuvering target tracking[J]. Sensors, 2017, 17 (6): 1374.
doi: 10.3390/s17061374 |
| 14 |
GAO B B , GAO S S , ZHONG Y M , et al. Interacting multiple model estimation-based adaptive robust unscented Kalman filter[J]. International Journal of Control, Automation and Systems, 2017, 15 (5): 2013- 2025.
doi: 10.1007/s12555-016-0589-2 |
| 15 |
QIU J , XING Z R , ZHU C S , et al. Centralized fusion based on interacting multiple model and adaptive Kalman filter for target tracking in underwater acoustic sensor networks[J]. IEEE Access, 2019, 7, 25948- 25958.
doi: 10.1109/ACCESS.2019.2899012 |
| 16 |
YOUN W , MYUNG H . Robust interacting multiple model with modeling uncertainties for maneuvering target tracking[J]. IEEE Access, 2019, 7, 65427- 65443.
doi: 10.1109/ACCESS.2019.2915506 |
| 17 |
HAN B , HUANG H Q , LEI L , et al. An improved IMM algorithm based on STSRCKF for maneuvering target tracking[J]. IEEE Access, 2019, 7, 57795- 57804.
doi: 10.1109/ACCESS.2019.2912983 |
| 18 |
ELTOUKHY M , AHMAD M O , SWAMY M N S . An adaptive turn rate estimation for tracking a maneuvering target[J]. IEEE Access, 2020, 8, 94176- 94189.
doi: 10.1109/ACCESS.2020.2995672 |
| 19 | LEE S, HWANG I. Interacting multiple model estimation for spacecraft maneuver detection and characterization[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2015: 1333. |
| 20 |
GOFF G M , BLACK J T , BECK J A . Tracking maneuvering spacecraft with filter-through approaches using interacting multiple models[J]. Acta Astronautica, 2015, 114, 152- 163.
doi: 10.1016/j.actaastro.2015.05.009 |
| 21 |
GOFF G M , BLACK J T , BECK J A . Orbit estimation of a continuously thrusting spacecraft using variable dimension filters[J]. Journal of Guidance, Control, and Dynamics, 2015, 38 (12): 2407- 2420.
doi: 10.2514/1.G001091 |
| 22 |
XIONG K , WEI C L , LIU L D . Robust multiple model adaptive estimation for spacecraft autonomous navigation[J]. Aero-space Science and Technology, 2015, 42, 249- 258.
doi: 10.1016/j.ast.2015.01.021 |
| 23 | HUANG J S, ZHANG H B, WU S, et al. An interacting-multiple-model method for tracking a hypersonic glide target[C]//Proc. of the IEEE Chinese Control and Decision Conference, 2020: 1702-1707. |
| 24 | LIANG Y , CHENG Y M , JIA Y G , et al. Analysis on the performance and properties of interacting multiple models algorithm[J]. Control Theory and Applications, 2001, 18 (4): 487- 492. |
| 25 |
LEE S , LEE J , HWANG I . Maneuvering spacecraft tracking via state-dependent adaptive estimation[J]. Journal of Gui-dance, Control, and Dynamics, 2016, 39 (9): 2034- 2043.
doi: 10.2514/1.G001567 |
| 26 |
臧荣春, 崔平远. 马尔可夫参数自适应IFIMM算法研究[J]. 电子学报, 2006, 34 (3): 521- 524.
doi: 10.3321/j.issn:0372-2112.2006.03.031 |
|
ZANG R C , CUI P Y . Research on adaptive Markov parameter IFIMM algorithm[J]. Acta Electronica Sinica, 2006, 34 (3): 521- 524.
doi: 10.3321/j.issn:0372-2112.2006.03.031 |
|
| 27 | 封普文, 黄长强, 曹林平, 等. 马尔可夫矩阵修正IMM跟踪算法[J]. 系统工程与电子技术, 2013, 35 (11): 2269- 2274. |
| FENG P W , HUANG C Q , CAO L P , et al. Research on adaptive Markov matrix IMM tracking algorithm[J]. Systems Engineering and Electronics, 2013, 35 (11): 2269- 2274. | |
| 28 |
戴定成, 姚敏立, 蔡宗平, 等. 改进的马尔可夫参数自适应IMM算法[J]. 电子学报, 2017, 45 (5): 1198- 1205.
doi: 10.3969/j.issn.0372-2112.2017.05.024 |
|
DAI D C , YAO M L , CAI Z P , et al. Improved adaptive Markov IMM algorithm[J]. Acta Electronica Sinica, 2017, 45 (5): 1198- 1205.
doi: 10.3969/j.issn.0372-2112.2017.05.024 |
|
| 29 | 郭志, 董春云, 蔡远利, 等. 时变转移概率IMM-SRCKF机动目标跟踪算法[J]. 系统工程与电子技术, 2015, 37 (1): 24- 30. |
| GUO Z , DONG C Y , CAI Y L , et al. Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking[J]. Systems Engineering and Electronics, 2015, 37 (1): 24- 30. | |
| 30 |
许登荣, 程水英, 包守亮. 自适应转移概率交互式多模型跟踪算法[J]. 电子学报, 2017, 45 (9): 2113- 2120.
doi: 10.3969/j.issn.0372-2112.2017.09.009 |
|
XU D R , CHENG S Y , BAO S L . Interacting multiple model algorithm based on adaptive transition probability[J]. Acta Electronica Sinica, 2017, 45 (9): 2113- 2120.
doi: 10.3969/j.issn.0372-2112.2017.09.009 |
| [1] | Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking [J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482. |
| [2] | Xinmin TANG, Pengcheng ZHENG. IMM aircraft short-term track extrapolation based on geodetic coordinate system [J]. Systems Engineering and Electronics, 2022, 44(7): 2293-2301. |
| [3] | Yu LU, Haibin WANG. Maneuvering target tracking algorithm for airborne passive coherent localization system [J]. Systems Engineering and Electronics, 2021, 43(4): 875-882. |
| [4] | Xing CHEN, Zhanwu LI, An XU, Xiaodong HU. VSMM algorithm based on target maneuver pattern recognition [J]. Systems Engineering and Electronics, 2020, 42(5): 999-1006. |
| [5] | LIU Dai, ZHAO Yongbo, ZHOU Yongwei, CHEN Mingzhe, LI Wei. Maneuvering target tracking algorithm aided by a high resolution range profile [J]. Systems Engineering and Electronics, 2019, 41(9): 1967-1972. |
| [6] | ZHANG Haowei, XIE Junwei, GE Jiaang, ZONG Binfeng, LU Wenlong. Strong tracking squareroot cubature Kalman filter overadaptive current statistical model [J]. Systems Engineering and Electronics, 2019, 41(6): 1186-1194. |
| [7] | LI Bo, LI Qingying, GAO Xiaoguang, ZHANG Chunyan. Radar radiation control under multiple sensor synergy based on ordinal optimization [J]. Systems Engineering and Electronics, 2018, 40(7): 1465-1471. |
| [8] |
SUN Yang, ZHENG Nae, LI Yuxiang, REN Xiukun.
Distributed MIMO radar resource allocation approach for target tracking [J]. Systems Engineering and Electronics, 2017, 39(8): 1744-1750. |
| [9] | YANG Yong-jian, FAN Xiao-guang, WANG Sheng-da, ZHUO Zhen-fu, NAN Jian-guo, HUANG Bo-ru. Interacting multiple model algorithm based on adaptive current statistical model [J]. Systems Engineering and Electronics, 2016, 38(5): 977-. |
| [10] | GUO Zhi, DONG Chun-yun, CAI Yuan-li, YU Zhen-hua. Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking [J]. Systems Engineering and Electronics, 2015, 37(1): 24-30. |
| [11] | LI Xin-sheng, LI Gang. Smooth ADS-B data by IMMKF for 3D display of airport situation [J]. Systems Engineering and Electronics, 2015, 37(1): 206-211. |
| [12] | CAI Zongping, DAI Dingcheng, NIU Chuang. Interacting multiple model algorithm with cubature particle filter [J]. Systems Engineering and Electronics, 2014, 36(12): 2366-2370. |
| [13] | ZHOU Hang, FENG Xin-xi, WANG Rong, ZHANG Jing. Maneuvering target passive tracking based on adaptive extended H∞ filter [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 256-262. |
| [14] | LI Liangqun, XIE Weixin, ZHANG Zhichao. New adaptive α-β tracking filter algorithm based on fuzzy logic [J]. Journal of Systems Engineering and Electronics, 2013, 35(2): 244-249. |
| [15] | CHEN Liang, YANG Jun-wei, SHU Xiao-di. Model-set adaptive algorithm of variable structure multiple-model based on K-L criterion [J]. Systems Engineering and Electronics, 2013, 35(12): 2459-2466. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||