Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (8): 2232-2243.doi: 10.12305/j.issn.1001-506X.2021.08.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle
Caihong YUE1, Shengjing TANG1, Jie GUO1,*, Xiao WANG2, Haoqiang ZHANG3
- 1. School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
2. Tactical Weapons Division, China Academy of Launch Vehicle Technology, Beijing 100076, China
3. China North Industries Corporation, Beijing 100053, China
-
Received:2020-12-09Online:2021-07-23Published:2021-08-05 -
Contact:Jie GUO
CLC Number:
Cite this article
Caihong YUE, Shengjing TANG, Jie GUO, Xiao WANG, Haoqiang ZHANG. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle[J]. Systems Engineering and Electronics, 2021, 43(8): 2232-2243.
share this article
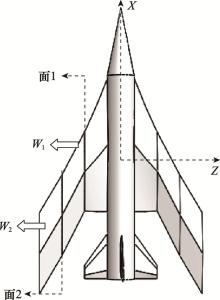
Fig.1
Morphing vehicle configuration"
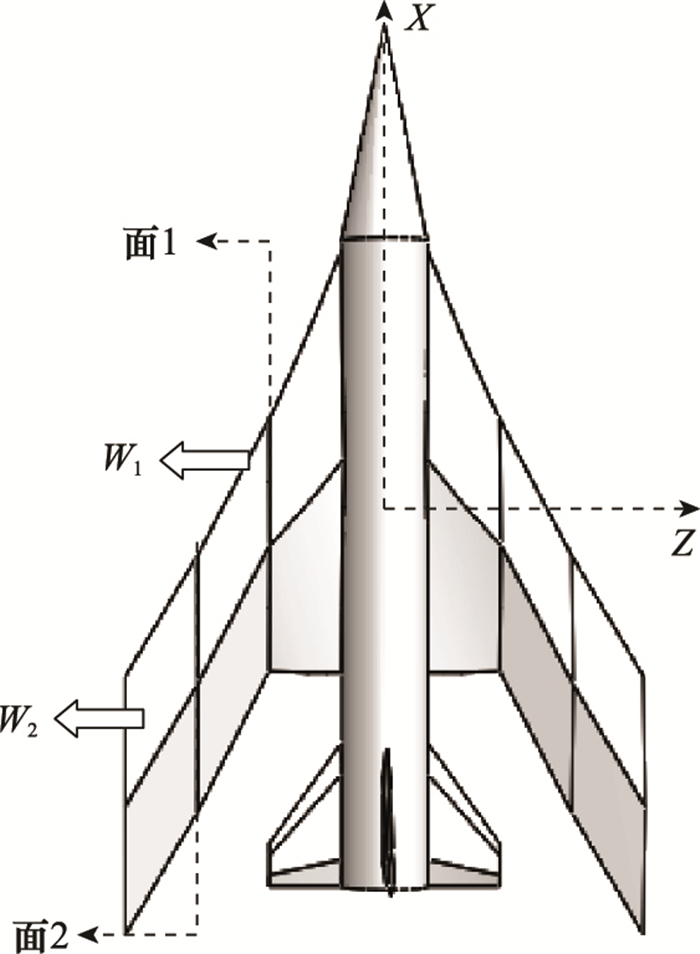
Table 1
Aerodynamic coefficients fitting result"
| 升力系数 | 原外形 | 变形1 | 变形2 | 阻力系数 | 原外形 | 变形1 | 变形2 | |
| p0 | 0.121 | 0.213 5 | 0.190 3 | q0 | 0.037 72 | 0.065 33 | 0.090 67 | |
| p1 | -0.017 4 | -0.035 6 | -0.034 7 | q1 | 0.005 36 | 0.001 05 | -0.002 6 | |
| p2 | 0.403 2 | 1.25 | 2.243 | q2 | -0.679 1 | -0.642 1 | -0.674 7 | |
| p3 | 0.000 58 | 0.001 33 | 0.001 35 | q3 | -0.000 3 | -0.000 2 | -0.000 1 | |
| p4 | 0.005 9 | -0.012 2 | -0.035 | q4 | 0.009 98 | 0.003 22 | 0.001 92 | |
| p5 | 6.137 | 5.128 | 4.998 | q5 | 4.398 | 4.972 | 5.834 | |
| RS系数 | 0.988 9 | 0.990 9 | 0.985 2 | RS系数 | 0.944 6 | 0.986 3 | 0.993 2 |
Table 2
Endpoint constraint"
| 参数 | 初始 | 终端 |
| 高度h/km | 60 | 30 |
| 经度λ/(°) | 0 | 自由 |
| 纬度ϕ/(°) | 0 | 自由 |
| 速度V/(m·s-1) | 6 000 | 2 000 |
| 航迹角θ/(°) | 0 | 自由 |
| 航向角ψ/(°) | 90 | 自由 |
Table 3
Optimization convergence 16:36:56"
| 目标函数 | 配点数目 | NLP计算方法 | 耗时/s |
| 最大纬度 | 10 | 本文方法 | 24.31 |
| 有限差分法 | 739.02 | ||
| 20 | 本文方法 | 23.44 | |
| 有限差分法 | 2 031.21 | ||
| 最大速度 | 10 | 本文方法 | 38.40 |
| 有限差分法 | 1 199.03 | ||
| 20 | 本文方法 | 37.39 | |
| 有限差分法 | 2 810.08 | ||
| 最小飞行时间 | 10 | 本文方法 | 12.80 |
| 有限差分法 | 446.76 | ||
| 20 | 本文方法 | 33.89 | |
| 有限差分法 | 2 711.35 |
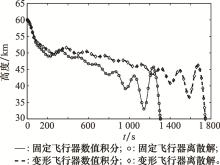
Fig.2
Altitude variation curves of the maximum lateral range"

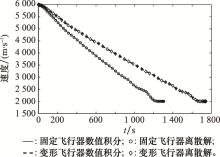
Fig.3
Velocity variation curves of the maximum lateral range"
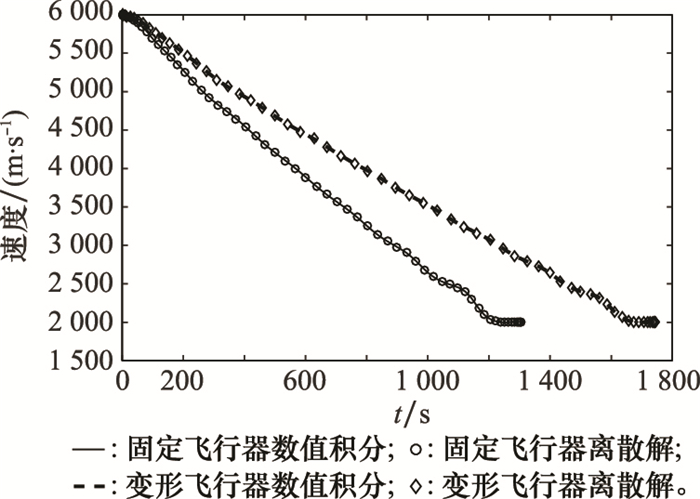
Fig.4
Ground tracks of the maximum lateral range"
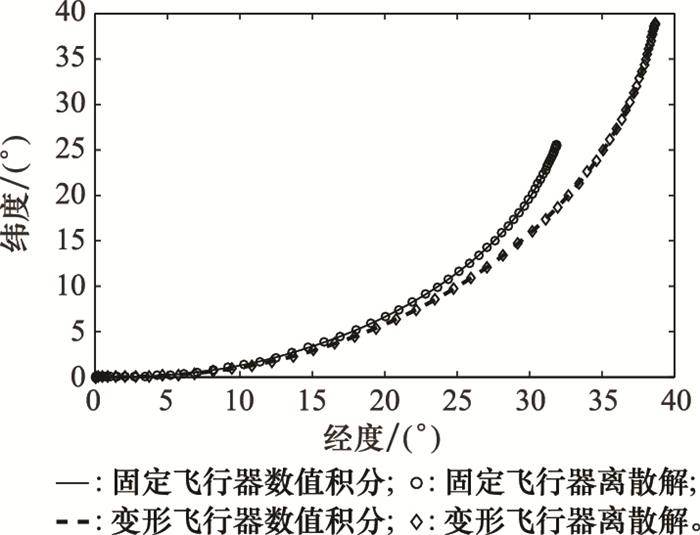

Fig.5
Heating rates curves"
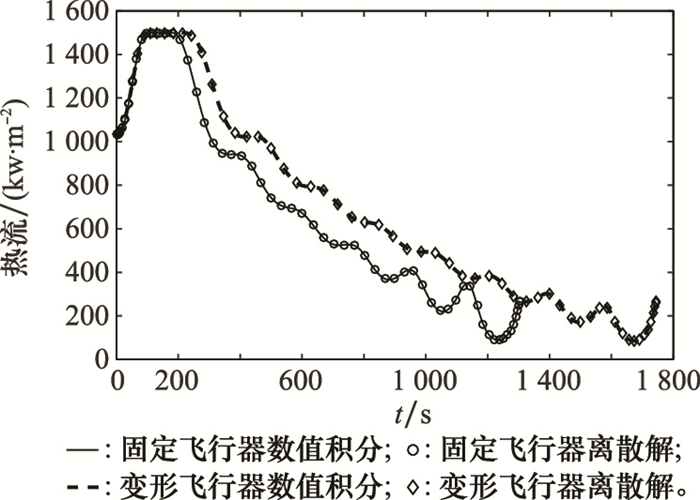
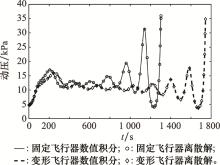
Fig.6
Dynamic pressures curves"
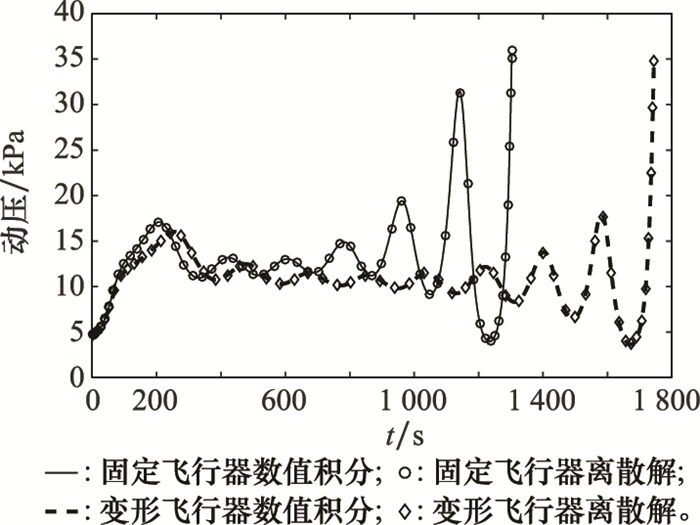

Fig.7
Overloads curves"

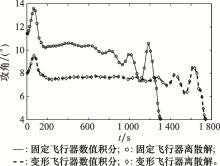
Fig.8
Attack angle curves of the maximum lateral range"

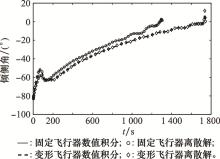
Fig.9
Bank angle curves"
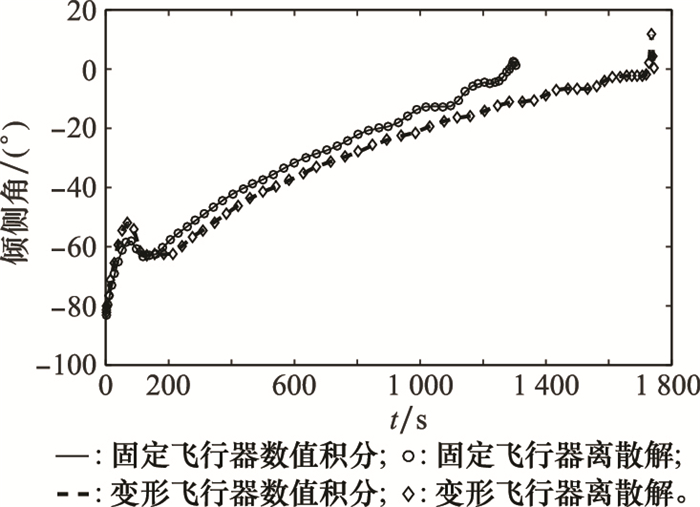
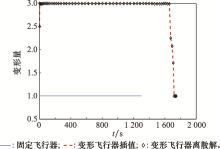
Fig.10
Deformation curves"

Table 4
Optimization results"
| 飞行器类型 | 经度/(°) | 纬度/(°) | 航程/km |
| 变形飞行器 | 38.66 | 38.94 | 5 855.6 |
| 固定外形飞行器 | 31.87 | 25.58 | 4 453.1 |
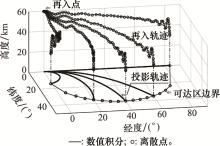
Fig.11
Examples of trajectories at the boundary of morphing vehicle's left-half landing footprint"

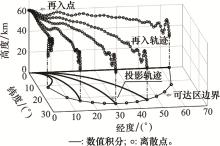
Fig.12
Examples of trajectories at the boundary of fixed shape vehicle's left-half landing footprint"
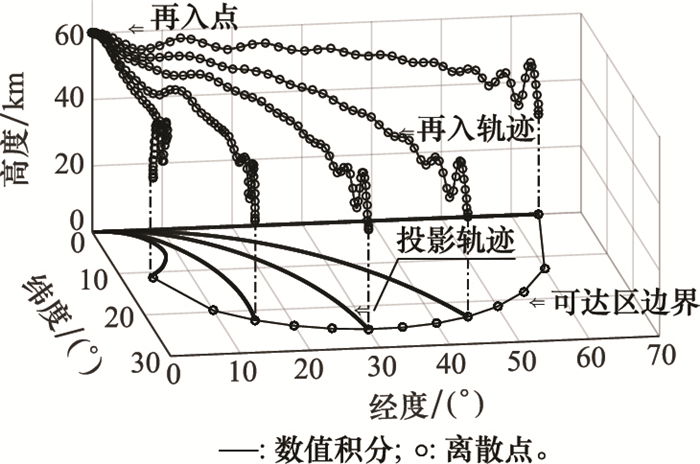
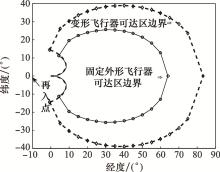
Fig.13
Boundary of two vehicles' landing footprint"
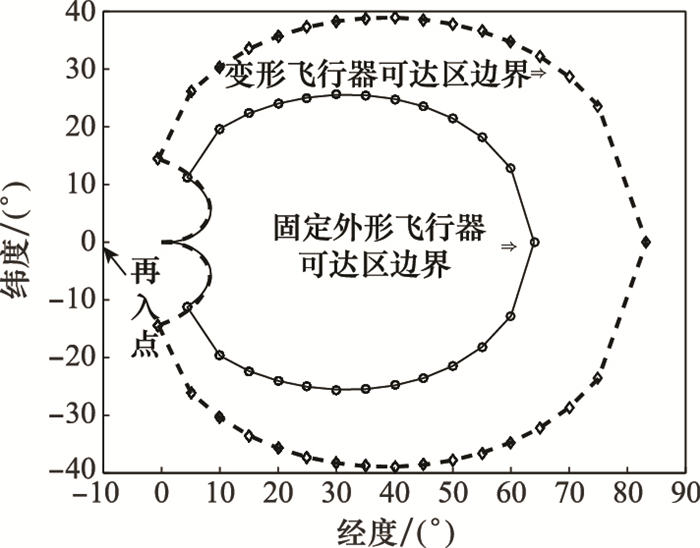

Fig.14
Altitude curves of the maximum terminal speed"
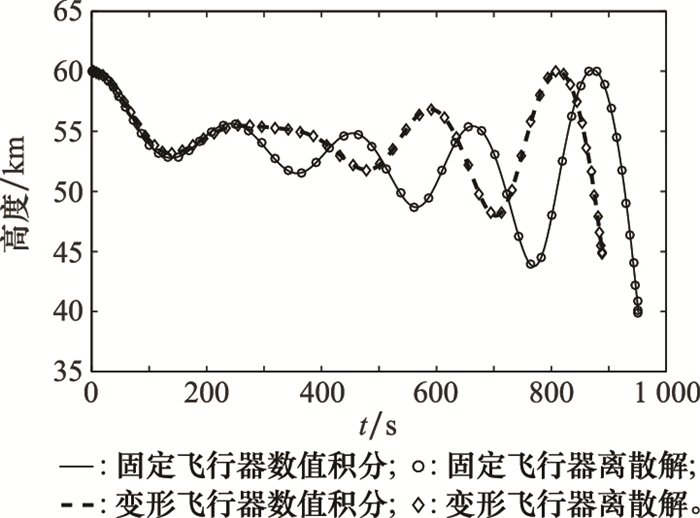
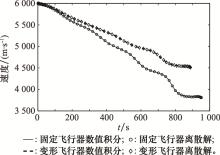
Fig.15
Velocity curves of the maximum terminal speed"

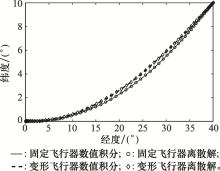
Fig.16
Ground tracks of the maximum terminal speed"


Fig.17
Attack angle curves of the maximum terminal speed"

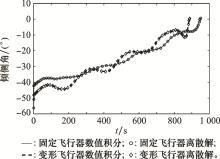
Fig.18
Bank angle curves of the maximum terminal speed"
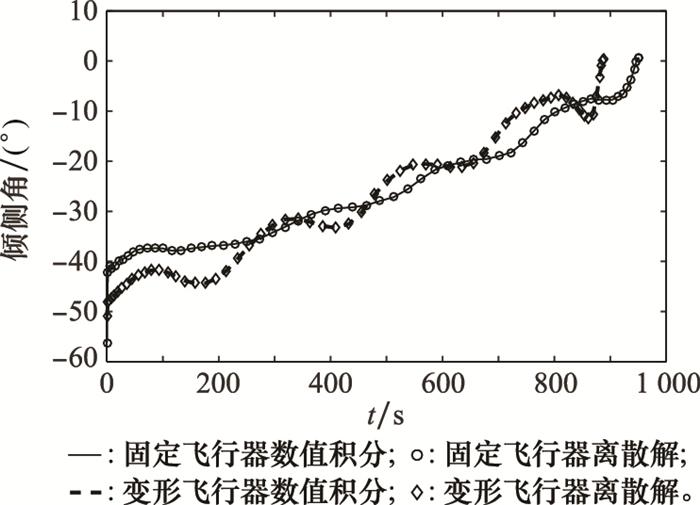

Fig.19
Deformation curves of the maximum terminal speed"
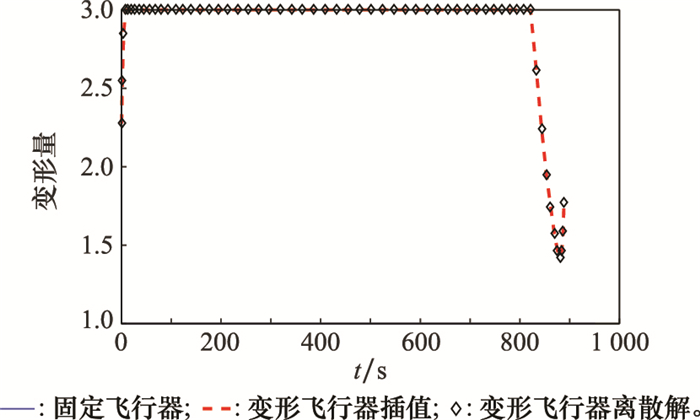
Fig.20
Altitude curves of the minimum flight time"
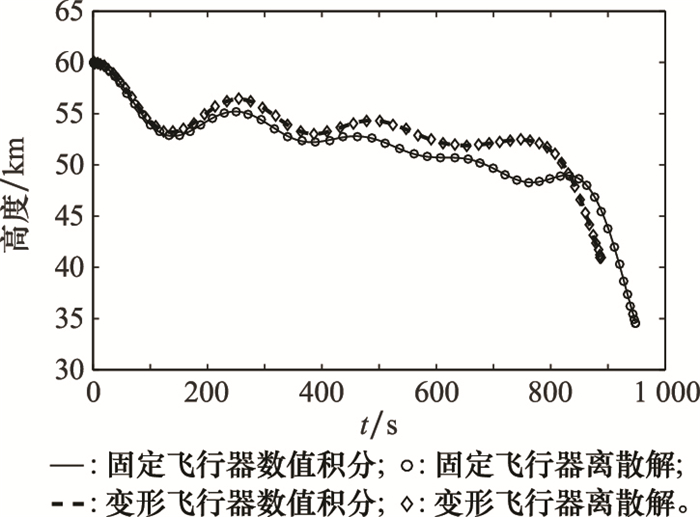

Fig.21
Velocity curves of the minimum flight time"
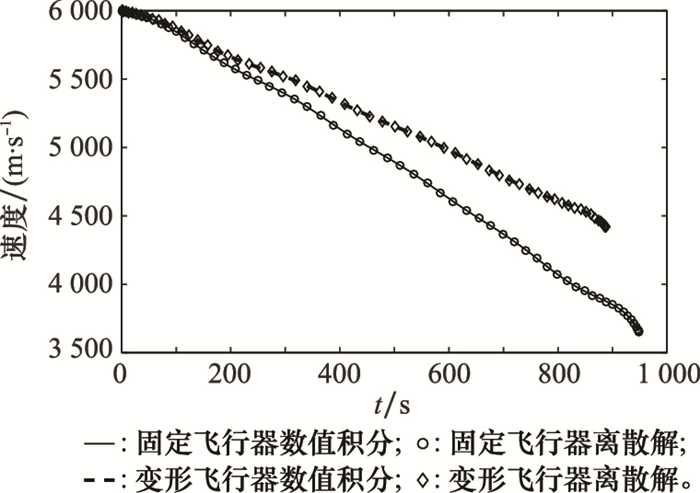
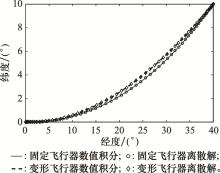
Fig.22
Ground tracks of the minimum flight time"
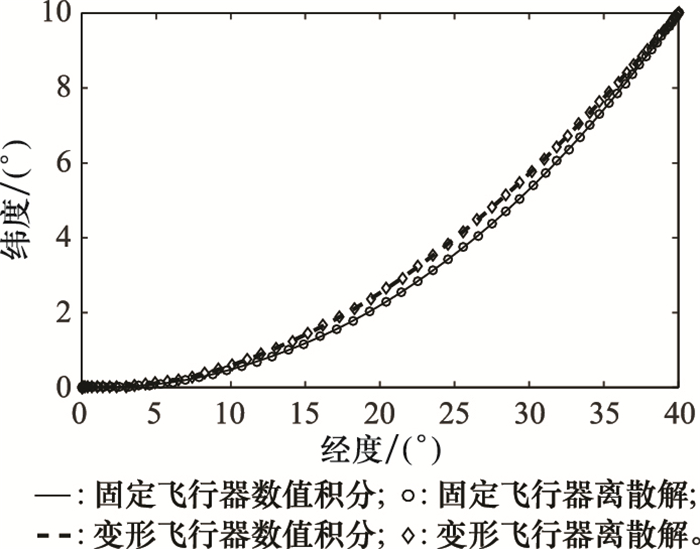
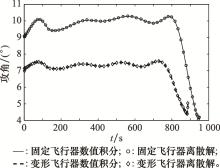
Fig.23
Attack angle curves of the minimum flight time"
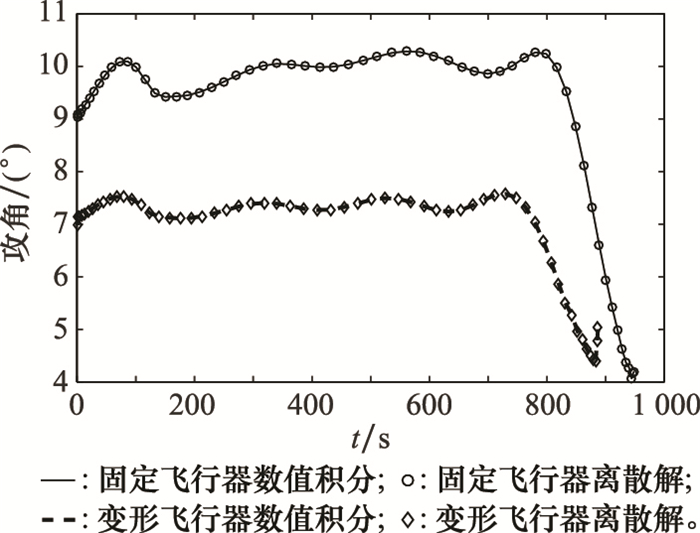

Fig.24
Bank angle curves of the minimum flight time"
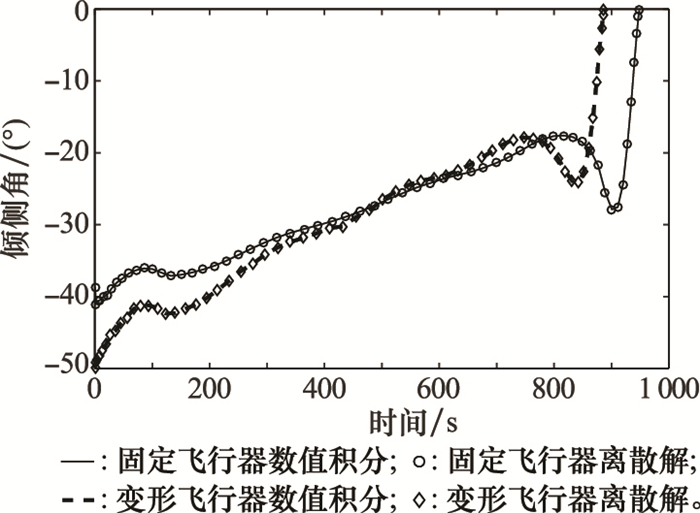
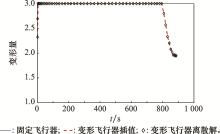
Fig.25
Deformation curves of the minimum flight time"

| 1 | BARBARINO S , BILGEN O , AJAJ R M , et al. A review of morphing aircraft[J]. Journal of Intelligent Material Systems & Structures, 2011, 22 (9): 823- 877. |
| 2 |
KUDVA J N . Overview of the DARPA smart wing project[J]. Journal of Intelligent Material Systems and Structures, 2004, 15 (4): 261- 268.
doi: 10.1177/1045389X04042796 |
| 3 | BAO C Y, WANG P, TANG G J. Integrated method of guidance control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics. DOI: https://doi.org/10.1016/j.cja.2020.11.009. |
| 4 |
BAE J S , SEIGLER T M , INMAN D J . Aerodynamic and static aeroelastic characteristics of a variable-span morphing wing[J]. Journal of Aircraft, 2005, 42 (2): 528- 534.
doi: 10.2514/1.4397 |
| 5 |
SECANELL M , SULEMAN A , GAMBOA P . Design of a morphing airfoil using aerodynamic shape optimization[J]. AIAA Journal, 2006, 44 (7): 1550- 1562.
doi: 10.2514/1.18109 |
| 6 |
白鹏, 陈钱, 徐国武, 等. 智能可变形飞行器关键技术发展现状及展望[J]. 空气动力学学报, 2019, 37 (3): 426- 443.
doi: 10.7638/kqdlxxb-2019.0030 |
|
BAI P , CHEN Q , XU G W , et al. Development status of key technologies and exception about smart morphing aircraft[J]. Acta Aerodynamica Sinica, 2019, 37 (3): 426- 443.
doi: 10.7638/kqdlxxb-2019.0030 |
|
| 7 |
LU P . Entry guidance: a unified method[J]. Journal of Gui-dance Control and Dynamics, 2014, 37 (3): 713- 728.
doi: 10.2514/1.62605 |
| 8 |
KUMAR G N , IKRAM M , SARKAR A K , et al. Hypersonic flight vehicle trajectory optimization using pattern search algorithm[J]. Optimization and Engineering, 2018, 19 (1): 125- 161.
doi: 10.1007/s11081-017-9367-0 |
| 9 | LI G H , ZHANG H B , TANG G J . Maneuver characteristics analysis for hypersonic glide vehicles[J]. Aerospace Science and Technology, 2015, 43 (6): 321- 328. |
| 10 | SARAH N D , NESRIN S K . Survey of planetary entry guidance algorithms[J]. Progress in Aerospace Sciences, 2014, 68 (1): 22- 28. |
| 11 |
ZHAO J , ZHOU R , JIN X L . Progress in reentry trajectory planning for hypersonic vehicle[J]. Journal of Systems Engineering and Electronics, 2014, 25 (4): 627- 639.
doi: 10.1109/JSEE.2014.00073 |
| 12 | JASA J P, HWANG J T, MARTINS J. Design and trajectory optimization of a morphing wing aircraft[C]//Proc. of the AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, 2018. |
| 13 | ORLITA M, VOS R. Cruise performance optimization of the airbus A320 through flap morphing[C]//Proc. of the 17th AIAA Aviation Technology, Integration, and Operations Conference, 2017. |
| 14 | 彭悟宇, 杨涛, 王常悦, 等. 高超声速伸缩翼变形飞行器轨迹多目标优化[J]. 国防科技大学学报, 2019, 41 (1): 44- 50. |
| PENG W Y , YANG T , WANG C Y , et al. Trajectory multi-objective optimization for hypersonic telescopic wing morphing aircraft[J]. Journal of National University of Defense Techno-logy, 2019, 41 (1): 44- 50. | |
| 15 | 陈铁彪, 龚旻, 王洪波, 等. 临近空间可变形滑翔飞行器轨迹优化与性能分析[J]. 宇航学报, 2018, 39 (9): 944- 952. |
| CHEN T B , GONG M , WANG H B , et al. Trajectory optimization and performance analysis of the near space morphing glid vehicles[J]. Journal of Astronautics, 2018, 39 (9): 944- 952. | |
| 16 | 徐文萤, 江驹, 甄子洋, 等. 改进多段高斯伪谱法的近空间可变翼飞行器小翼伸缩优化研究[J]. 哈尔滨工程大学学报, 2020, 41 (7): 1043- 1051. |
| XU W Y , JIANG J , ZHEN Z Y , et al. Stretch-out and drawback optimization of the winglets of near-space morphing hypersonic aircraft based on the improved multiband Gauss pseudospectrum[J]. Journal of Harbin Engineering University, 2020, 41 (7): 1043- 1051. | |
| 17 | BETTS J T . Practical methods for optimal control and estimation using nonlinear programming[J]. Applied Mathematics Reviews, 2002, 55 (4): 61- 82. |
| 18 |
DENNIS M E , HAGER W W , RAO A V . Computational method for optimal guidance andcontrol using adaptive Gaussian quadrature collocation[J]. Journal of Guidance, Control, and Dynamics, 2019, 42 (9): 2026- 2041.
doi: 10.2514/1.G003943 |
| 19 |
DARBY C L , GARG D , RAO A V . Costate estimation using multiple-interval pseudospectral methods[J]. Journal of Space-craft Rockets, 2011, 48 (5): 856- 866.
doi: 10.2514/1.A32040 |
| 20 |
GARG D , PATTERSON M , HAGER W W , et al. A unified framework for the numerical solution of optimal control problems using pseudospectral methods[J]. Automatica, 2010, 46 (11): 1843- 1851.
doi: 10.1016/j.automatica.2010.06.048 |
| 21 |
GONG Q , FAHROO F , ROSS I M . Spectral algorithm for pseudospectral methods in optimal control[J]. Journal of Gui-dance, Control and Dynamics, 2008, 31 (3): 460- 471.
doi: 10.2514/1.32908 |
| 22 |
BENSON D A , HUNTINGTON G T , THORVALDSEN T P , et al. Direct trajectory optimization and costate estimation via an orthogonal collocation method[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (6): 1435- 1440.
doi: 10.2514/1.20478 |
| 23 | 赵吉松, 张建宏, 李爽. 高超声速滑翔飞行器再入轨迹快速、高精度优化[J]. 宇航学报, 2019, 40 (9): 1034- 1043. |
| ZHAO J S , ZHANG J H , LI S . Rapid and high-accuracy approach for hypersonic glide vehicle reentry trajectory optimization[J]. Journal of Astronautics, 2019, 40 (9): 1034- 1043. | |
| 24 |
BETTS J T , HUFFMAN W P . Exploiting sparsity in the direct transcription method for optimal control[J]. Computational Optimization & Applications, 1999, 14 (2): 179- 201.
doi: 10.1023/A%3A1008739131724 |
| 25 | PATTERSON M A , RAO A V . Exploiting sparsity in direct collocation pseudospectral methods for solving optimal control problems[J]. Journal of Spacecraft and Rockets, 2012, 49 (2): 364- 377. |
| 26 | AGAMAWI Y M, RAO A V. Exploiting sparsity in direct orthogonal collocation methods for solving multiple-phase optimal control problems[C]//Proc. of the AIAA Space Flight Mechanics Meeting, 2018. |
| 27 | 彭悟宇, 杨涛, 涂建秋, 等. 高超声速变形飞行器翼面变形模式分析[J]. 国防科技大学学报, 2018, 40 (3): 15- 21. |
| PENG W Y , YANG T , TU J Q , et al. Analysis on wing deformation modes of hypersonic morphing aircraft[J]. Journal of National University of Defense Technology, 2018, 40 (3): 15- 21. | |
| 28 | 杨博, 朱一川, 魏延明, 等. 折叠式变体飞行器轨迹优化及控制分析[J]. 中国空间科学技术, 2020, 40 (3): 64- 75. |
| YANG B , ZHU Y C , WEI Y M , et al. Trajectory optimization and control analysis of folding wing aircraft[J]. Chinese Space Science and Technology, 2020, 40 (3): 64- 75. | |
| 29 | SHEN Z , LU P . Onboard generation of three-dimensional constrained entry trajectories[J]. Journal of Guidance Control & Dynamics, 2003, 26 (1): 111- 121. |
| 30 |
赵江, 周锐. 基于粒子群优化的再入可达区计算方法研究[J]. 兵工学报, 2015, 36 (9): 1680- 1687.
doi: 10.3969/j.issn.1000-1093.2015.09.012 |
|
ZHAO J , ZHOU R . Landing footprint computation based on particle swarm optimization[J]. Acta Armamentarii, 2015, 36 (9): 1680- 1687.
doi: 10.3969/j.issn.1000-1093.2015.09.012 |
| [1] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [2] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [3] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [4] | Junbao WEI, Haiyan LI, Jing LI. Novel backstepping control for hypersonic vehicle with angle of attack constraint [J]. Systems Engineering and Electronics, 2022, 44(4): 1310-1317. |
| [5] | Tengafei ZHANG, Chunlin GONG, Hua SU, Pengfei XUE. Trajectory optimization based on heat-augmented model and analysis of thermal protection structure [J]. Systems Engineering and Electronics, 2022, 44(3): 929-938. |
| [6] | Tong AN, Peng WANG, Jianhua WANG, Guojian TANG, Yulong PAN, Haishan CHEN. Integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles [J]. Systems Engineering and Electronics, 2022, 44(3): 956-966. |
| [7] | Junbiao ZHANG, Jiajun XIONG, Xuhui LAN, Fan LI, Wenjian LIU, Qiushi XI. 3D tracking algorithm of hypersonic gliding target based on adaptive filtering [J]. Systems Engineering and Electronics, 2022, 44(2): 628-636. |
| [8] | Rongyan XI, Tianyao HUANG, Guangbin ZHANG, Lei WANG, Yimin LIU. Forward-looking imaging based on alternating descent conditional gradient [J]. Systems Engineering and Electronics, 2021, 43(9): 2439-2447. |
| [9] | Ce JI, Jinzhi WANG, Boqun LI. OFDM sparse channel estimation based on RSAMP algorithm [J]. Systems Engineering and Electronics, 2021, 43(8): 2290-2296. |
| [10] | Jianguo GUO, Yalu SU. Control system design of adaptive dynamic programming for hypersonic vehicle [J]. Systems Engineering and Electronics, 2021, 43(6): 1628-1635. |
| [11] | Xiaoqiang LI, Jianfeng CHEN, Weijie TAN, Yang WEN, Rongrong ZHANG. Gridless DOA estimation method for monostatic MIMO array based on covariance matrix reconstruction [J]. Systems Engineering and Electronics, 2020, 42(5): 969-977. |
| [12] | Yan ZHAO, Jianfeng WU, Yupeng GAO. Information fusion method of hypersonic vehicle based on multi-agent navigation [J]. Systems Engineering and Electronics, 2020, 42(2): 405-413. |
| [13] | Gaoyue WANG, Huijun ZHANG, Xian CHEN, Hao LI. Prediction method of spacecraft flight capability in atmospheric entry phase based on Gaussian process regression [J]. Systems Engineering and Electronics, 2020, 42(10): 2334-2339. |
| [14] | Yuan LUO, Jiaojiao DANG, Zuxun SONG, Baoping WANG. Achieving adaptive compressive spectrum sensing for cognitive radio [J]. Systems Engineering and Electronics, 2020, 42(1): 15-22. |
| [15] | ZHANG Yongshun, ZHU Weigang, JIA Xin, WANG Manxi. NBI detection and parameter estimation in DSSS communications based on BSBL [J]. Systems Engineering and Electronics, 2019, 41(4): 889-897. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||