Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (11): 3632-3639.doi: 10.12305/j.issn.1001-506X.2023.11.31
• Guidance, Navigation and Control • Previous Articles Next Articles
Integrated navigation trajectory prediction method based on deep Gaussian process for multiple unknown environments
Luning YANG, Zhenghua LIU, Nuan WEN
- School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
-
Received:2022-07-07Online:2023-10-25Published:2023-10-31 -
Contact:Zhenghua LIU
CLC Number:
Cite this article
Luning YANG, Zhenghua LIU, Nuan WEN. Integrated navigation trajectory prediction method based on deep Gaussian process for multiple unknown environments[J]. Systems Engineering and Electronics, 2023, 45(11): 3632-3639.
share this article
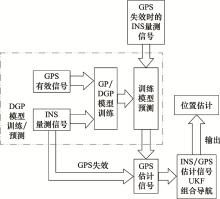
Fig.1
GP/DGP-UKF integrated navigation framework flow chart"
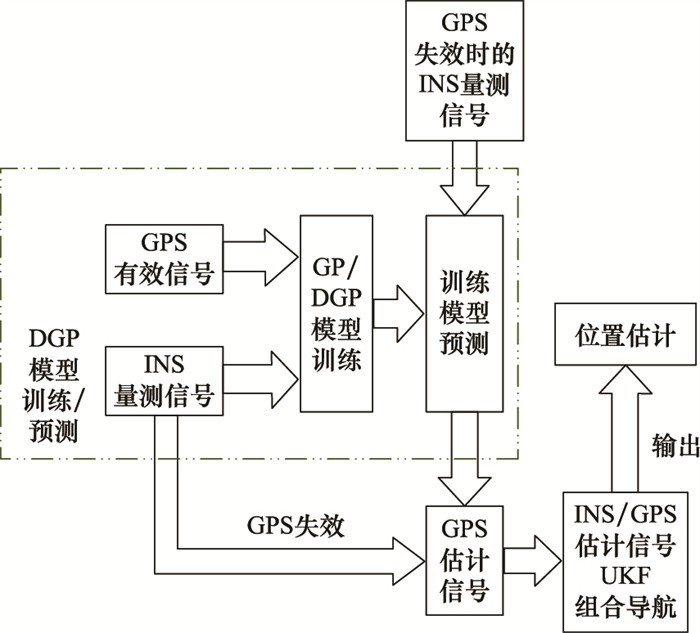
Table 1
Three models and model parameters"
| 模型参数 | LSTM | GP | DGP |
| 均值函数 | - | Constant_mean | Constant_mean |
| 核函数 | - | RBFKernel | RBFKernel |
| 优化器 | Adam | Adam | Adam |
| 学习率 | 0.1 | 0.1 | 0.1 |
| 诱导点数目 | - | - | 5 |
| 网络层数 | 2 | - | 2 |
| 隐藏层神经元数目 | 32 | - | - |
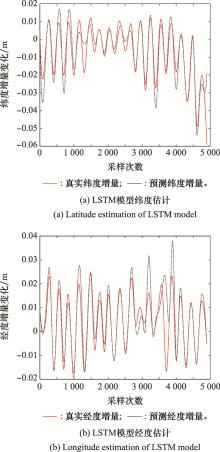
Fig.2
LSTM model test effect drawing"
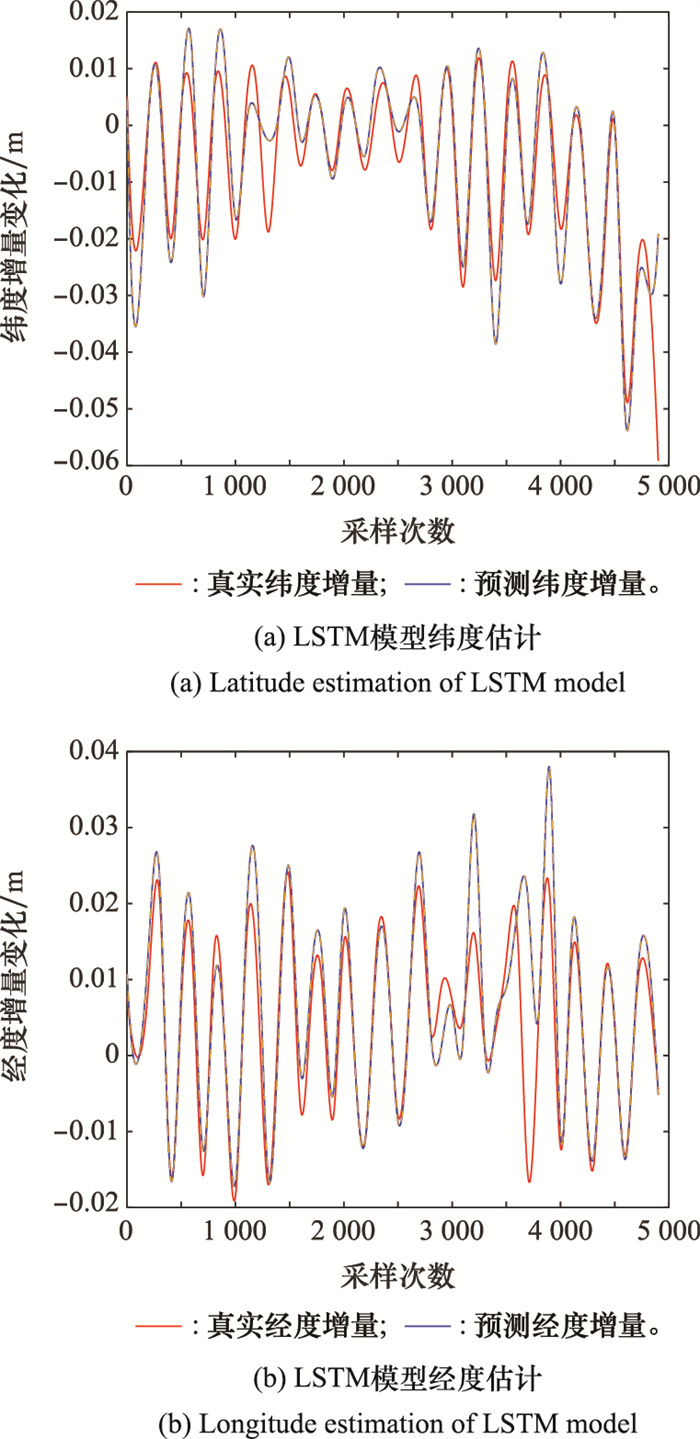
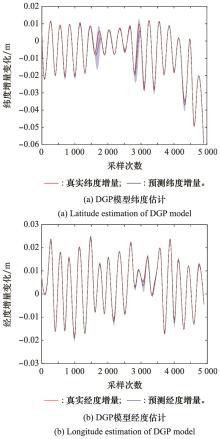
Fig.3
GP model test effect drawing"
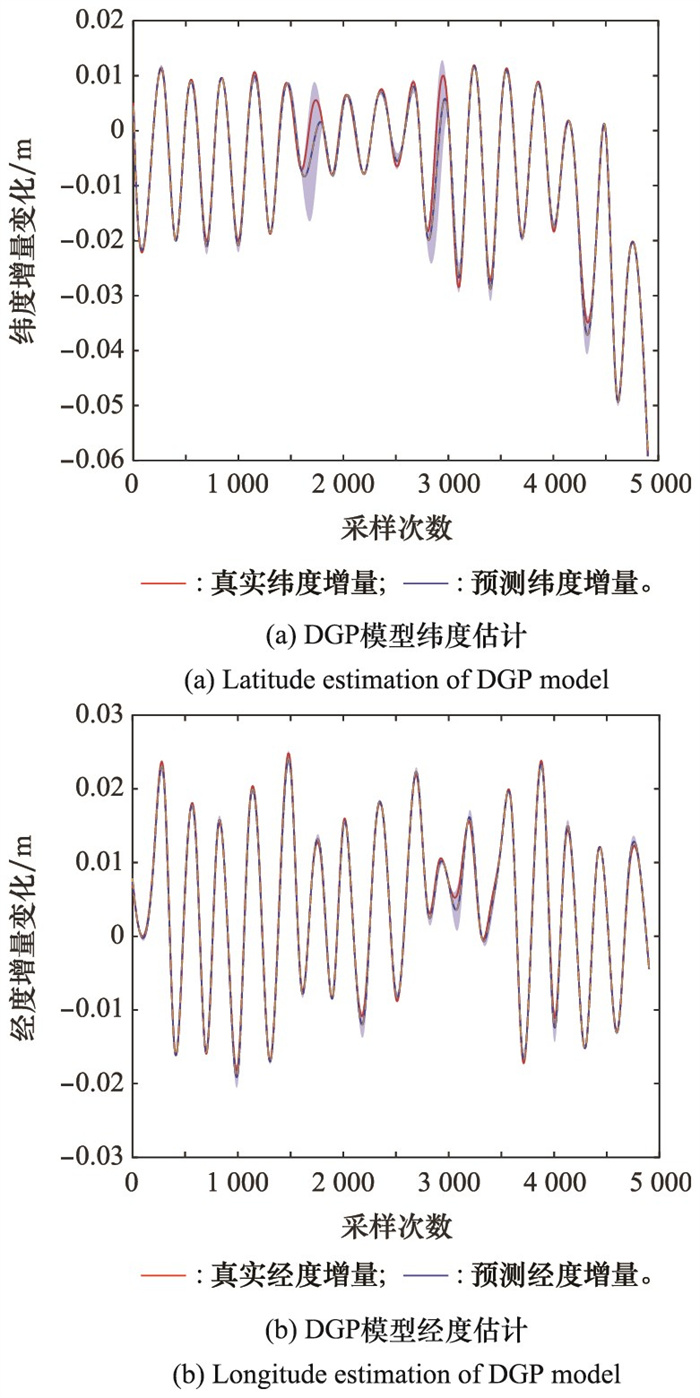
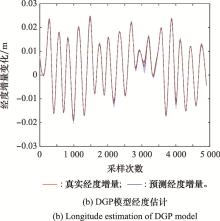
Fig.4
DGP model test effect drawing"
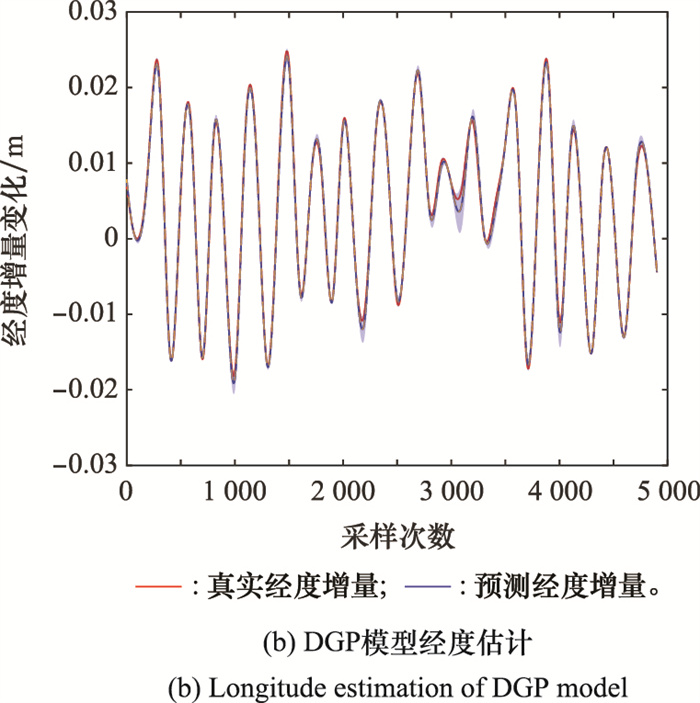
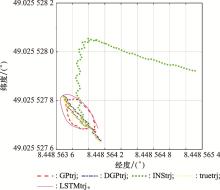
Fig.5
Three models predict and real trajectories"
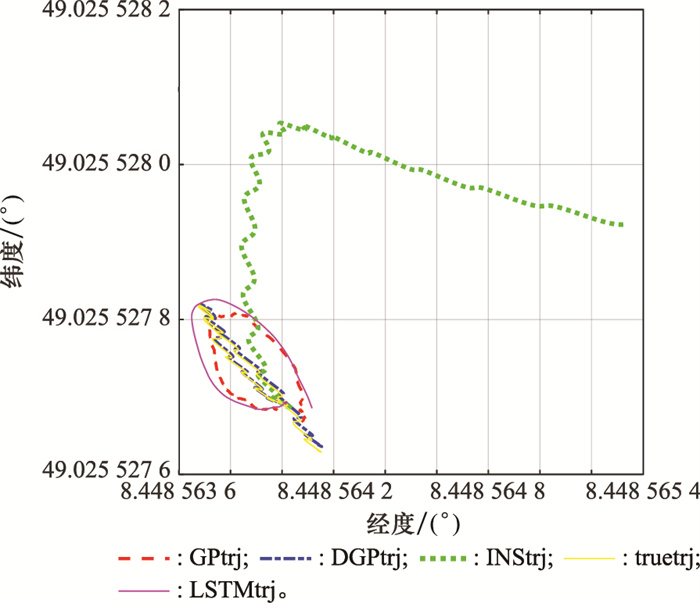

Fig.6
Three models predict error north and east direction"
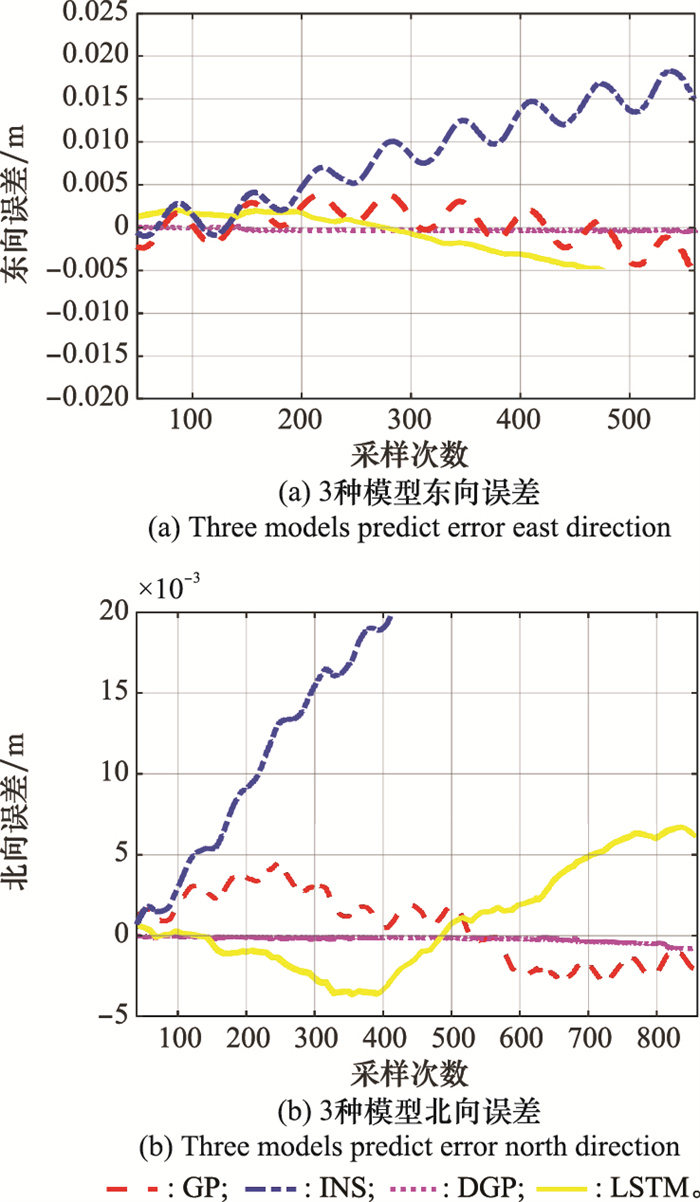
Table 2
Error comparison of LSTM-UKF/GP-UKF/DGP-UKF three model"
| 参数 | LSTM-UKF | GP-UKF | DGP-UKF |
| 100 s东向误差/m | 0.049 | 0.046 | 0.040 |
| 200 s东向误差/m | 0.298 | 0.278 | 0.148 |
| 500 s东向误差/m | 26.669 | 22.585 | 15.915 |
| 100 s北向误差/m | 0.048 | 0.047 | 0.038 |
| 200 s北向误差/m | 0.288 | 0.274 | 0.138 |
| 500 s北向误差/m | 26.529 | 22.337 | 15.868 |
| 1 |
GAO B B , HU G G , GAO S S , et al. Multi-sensor optimal data fusion for INS/GNSS/CNS integration based on unscented Kalman filter[J]. International Journal of Control, Automation and Systems, 2018, 16, 129- 140.
doi: 10.1007/s12555-016-0801-4 |
| 2 |
LI X , CHEN W , CHAN C Y , et al. Multi-sensor fusion metho-dology for enhanced land vehicle positioning[J]. Information Fusion, 2019, 46, 51- 62.
doi: 10.1016/j.inffus.2018.04.006 |
| 3 |
HAVYARIMAN V , HANYURWIMFURA D , NSENGIYUMVA P , et al. A novel hybrid approach based-SRG model for vehicle position prediction in multi-GPS outage conditions[J]. Information Fusion, 2018, 41, 1- 8.
doi: 10.1016/j.inffus.2017.07.002 |
| 4 |
孟阳, 高社生, 王维. 基于高斯过程回归的平方根UPF算法[J]. 系统工程与电子技术, 2015, 37 (12): 2817- 2822.
doi: 10.3969/j.issn.1001-506X.2015.12.23 |
|
MENG Y , GAO S S , WANG W . Square root UPF algorithm based on Gaussian process regression[J]. Systems Engineering and Electronics, 2015, 37 (12): 2817- 2822.
doi: 10.3969/j.issn.1001-506X.2015.12.23 |
|
| 5 | COSTANZI R , FANELLI F , MELI E , et al. UKF-based navigation system for AUVs: online experimental validation[J]. IEEE Journal of Oceanic Engineering, 2018, 44 (3): 633- 641. |
| 6 | CUTARJAR K, BONILLA E V, MICHIARDI P, et al. Random feature expansions for deep Gaussian processes[C]//Proc. of the International Conference on Machine Learning, 2017: 884-893. |
| 7 |
LI Y , LU X Y , WANG J , et al. Pedestrian trajectory prediction combining probabilistic reasoning and sequence learning[J]. IEEE Trans.on Intelligent Vehicles, 2020, 5 (3): 461- 474.
doi: 10.1109/TIV.2020.2966117 |
| 8 |
HABIBI G , HOW J P . Human trajectory prediction using similarity-based multi-model fusion[J]. IEEE Robotics and Automation Letters, 2021, 6 (2): 715- 722.
doi: 10.1109/LRA.2020.3048652 |
| 9 | 翟翠红, 汪建均, 冯泽彪. 基于高斯过程模型的多响应稳健参数设计[J]. 系统工程与电子技术, 2021, 43 (12): 3683- 3693. |
| ZHAI C H , WANG J J , FENG Z B . Multi-response robust parameter design based on Gaussian Process model[J]. Systems Engineering and Electronics, 2021, 6 (2): 715- 722. | |
| 10 |
LIU Y , FAN X , LYU C , et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mechanical Systems and Signal Processing, 2018, 100, 605- 616.
doi: 10.1016/j.ymssp.2017.07.051 |
| 11 |
GEIGER A , LENZ P , STILLER C , et al. Vision meets robo-tics: the kitti dataset[J]. The International Journal of Robotics Research, 2013, 32 (11): 1231- 1237.
doi: 10.1177/0278364913491297 |
| 12 |
YUE X Z , LI H W . A hybrid intelligent algorithm DGP-MLP for GNSS/INS integration during GNSS outages[J]. Journal of Navigation, 2019, 72 (2): 375- 388.
doi: 10.1017/S0373463318000760 |
| 13 |
ZHANG Y . A fusion methodology to bridge GPS outages for INS/GPS integrated navigation system[J]. IEEE Access, 2019, 7, 61296- 61306.
doi: 10.1109/ACCESS.2019.2911025 |
| 14 |
YOON Y , KIM C , LEE J , et al. Interaction-aware probabilistic trajectory prediction of cut-in vehicles using Gaussian process for proactive control of autonomous vehicles[J]. IEEE Access, 2021, 9, 63440- 63455.
doi: 10.1109/ACCESS.2021.3075677 |
| 15 |
MU X K , HE B , ZHANG X , et al. End-to-end navigation for autonomous underwater vehicle with hybrid recurrent neural networks[J]. Ocean Engineering, 2019, 194, 106602.
doi: 10.1016/j.oceaneng.2019.106602 |
| 16 | FU M Y , ZHANG T , SONG W J , et al. Trajectory prediction-based local spatio-temporal navigation map for autonomous driving in dynamic highway environments[J]. IEEE Trans.on Intelligent Transportation Systems, 2021, 23 (7): 6418- 6429. |
| 17 | LIU K L , TANG X P , TEODORESCU R , et al. Future ageing trajectory prediction for lithium-ion battery considering the knee point effect[J]. IEEE Trans.on Energy Conversion, 2021, 37 (2): 1282- 1291. |
| 18 |
CHEN Z M , GUO D Y , LIN Y . A deep Gaussian process-based flight trajectory prediction approach and its application on conflict detection[J]. Algorithms, 2020, 13 (11): 293.
doi: 10.3390/a13110293 |
| 19 | BROOKS J , BAROOAH P . Consumer-aware distributed demand-side contingency service in the power grid[J]. IEEE Trans.on Control of Network Systems, 2017, 5 (4): 1987- 1997. |
| 20 | 郑天宇. 基于循环神经网络的临近空间高超声速目标航迹估计与预报[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| ZHENG T Y. Near-space hypersonic target track estimation and prediction based on recurrent neural network[D]. Harbin: Harbin Institute of Technology University, 2020. | |
| 21 |
CHEN H M , CHENG X H , WANG H P , et al. Dealing with observation outages within navigation data using Gaussian process regression[J]. The Journal of Navigation, 2014, 67 (4): 603- 615.
doi: 10.1017/S0373463314000010 |
| 22 | 孙浩. 考虑交通车辆运动不确定性的轨迹规划方法研究[D]. 长春: 吉林大学, 2017. |
| SUN H. Research on trajectory planning method considering the uncertainty of vehicle movement[D]. Changchun: Jilin University, 2017. | |
| 23 | LYU Z H , LI Y X , FENG H L , et al. Deep learning for secu-rity in digital twins of cooperative intelligent transportation systems[J]. IEEE Trans.on Intelligent Transportation Systems, 2021, 23 (9): 16666- 16675. |
| 24 | WANG J M , FLEETl D J , HERTZMANN A . Gaussian process dynamical models for human motion[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2007, 30 (2): 283- 298. |
| 25 |
ZHOU R Y , CHEN H , CHEN H R , et al. Research on traffic situation analysis for urban road network through spatiotemporal data mining: a case study of Xi'an, China[J]. IEEE Access, 2021, 9, 75553- 75567.
doi: 10.1109/ACCESS.2021.3082188 |
| 26 | CAO D , ZHAO J B , HU W H , et al. Robust deep Gaussian process-based probabilistic electrical load forecasting against anomalous events[J]. IEEE Trans.on Industrial Informatics, 2021, 18 (2): 1142- 1153. |
| 27 |
KIM Y , CHO J , CHO K , et al. Glass-interposer electromagnetic bandgap structure with defected ground plane for broadband suppression of power/ground noise coupling[J]. IEEE Trans.on Components, Packaging and Manufacturing Technology, 2017, 7 (9): 1493- 1505.
doi: 10.1109/TCPMT.2017.2730853 |
| 28 | PAN X G , ZHAN X H , DAI B , et al. Exploiting deep generative prior for versatile image restoration and manipulation[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2021, 44 (11): 7474- 7489. |
| 29 |
CHEN Z L , GUO Q , LI T S , et al. Gait prediction and variable admittance control for lower limb exoskeleton with measurement delay and extended-state-observer[J]. IEEE Trans.on Neural Networks and Learning Systems, 2022,
doi: 10.1109/TNNLS.2022.3152255 |
| 30 | MUNOZ-GONZALEZ L , LAZARO-GREDILLA M , FIGUEIRAS-VIDAL A R . Laplace approximation for divisive Gaussian processes for nonstationary regression[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2015, 38 (3): 618- 624. |
| 31 | MATHEW V , KURIAN C P , AUGUSTINE N . Optimizing daylight glare and circadian entrainment in a Daylight-Artificial Light Integrated scheme[J]. IEEE Access, 2022, 10, 38174- 38188. |
| [1] | Wenjuan REN, Zhanpeng YANG, Guangluan XU, Kun FU. Fusion calculation model of sea moving target identity confidence [J]. Systems Engineering and Electronics, 2023, 45(4): 1082-1089. |
| [2] | Ye ZHANG, Yi HOU, Kewei OUYANG, Shilin ZHOU. Survey of univariate sequence data classification methods [J]. Systems Engineering and Electronics, 2023, 45(2): 313-335. |
| [3] | Lin HUANG, Li GONG, Wei JIANG, Kangbo WANG. Remaining useful life prediction based on multi-source information fusion and HMM [J]. Systems Engineering and Electronics, 2022, 44(5): 1747-1756. |
| [4] | Haojie ZHANG, Rongmin LIANG, Yudong ZHANG. Design of simulation system for UGVs based on human-in-the-loop [J]. Systems Engineering and Electronics, 2022, 44(2): 538-545. |
| [5] | Chunling XUE, Fei CAO, Qing SUN, Jianqiang QIN, Xiaowei FENG. Sea-surface weak target detection based on multi-feature information fusion [J]. Systems Engineering and Electronics, 2022, 44(11): 3338-3345. |
| [6] | Yu ZHANG, Kai WU, Jie GUO, Zhishan GE, Baochao ZHANG. Adaptive sequential track-association algorithm based on data quality assessment [J]. Systems Engineering and Electronics, 2022, 44(11): 3477-3485. |
| [7] | Xin GUAN, Haotian YU, Xiao YI. Research on evidence independence and its influence on target recognition [J]. Systems Engineering and Electronics, 2022, 44(1): 192-198. |
| [8] | Ang GAO, Qisheng GUO, Zhiming DONG, Shaoqing YANG. Research on efficiency evaluation method of multi unmanned ground vehicle system based on EAS+MADRL [J]. Systems Engineering and Electronics, 2021, 43(12): 3643-3651. |
| [9] | Yan ZHAO, Jianfeng WU, Yupeng GAO. Information fusion method of hypersonic vehicle based on multi-agent navigation [J]. Systems Engineering and Electronics, 2020, 42(2): 405-413. |
| [10] | Jiawei LI, Jing JIANG, Chongyang LIU, Weihua WU. Maximum likelihood registration for systemic error of multiple spaceborne optical sensors [J]. Systems Engineering and Electronics, 2020, 42(1): 1-9. |
| [11] | SHAO Songshi, LIU Haitao, ZHANG Zhihua. Reliability estimation for warship spares by fusing multi-source prior information [J]. Systems Engineering and Electronics, 2019, 41(12): 2905-2910. |
| [12] | CHANG Tianqing, WANG Quandong, HAO Na, SUN Haoze, KONG Depeng. Target management and passive location based on information fusion [J]. Systems Engineering and Electronics, 2017, 39(9): 1921-1935. |
| [13] | TANG Xu, WU Qi, LI Mingyan, HUANG Dayu. Multipath fusion multi-target tracking algorithm for over-the-horizon radar [J]. Systems Engineering and Electronics, 2017, 39(7): 1493-1499. |
| [14] | SUN Lu, ZHOU Wei, JIANG Baichen, GUAN Jian. Multi-source trajectories similarity measure model with spatial and temporal constraints [J]. Systems Engineering and Electronics, 2017, 39(11): 2405-2413. |
| [15] | SU Xiao-yan, HAN Wen-hua, XU Pei-da, DENG Yong. Review of combining dependent evidence [J]. Systems Engineering and Electronics, 2016, 38(6): 1345-1351. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||