Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (3): 1038-1047.doi: 10.12305/j.issn.1001-506X.2024.03.30
• Guidance, Navigation and Control • Previous Articles Next Articles
Robust observer-based deep reinforcement learning for attitude stabilization of vertical takeoff and landing vehicle
Yanling LI1, Feizhou LUO2, Zhilei GE1,*
- 1. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
2. China Academy of Launch Vehicle Technology, Beijing 100076, China
-
Received:2023-02-17Online:2024-02-29Published:2024-03-08 -
Contact:Zhilei GE
CLC Number:
Cite this article
Yanling LI, Feizhou LUO, Zhilei GE. Robust observer-based deep reinforcement learning for attitude stabilization of vertical takeoff and landing vehicle[J]. Systems Engineering and Electronics, 2024, 46(3): 1038-1047.
share this article

Fig.1
Vertical takeoff and landing vehicle validation machine"


Fig.2
Vertical geographic coordinate system"


Fig.3
Attitude control block diagram of deep reinforcement learning vehicle vertical takeoff and landing based on robust observer"

Table 1
Network structure and hyperparameters of ROB-PPO algorithm"
| 名称 | 取值 |
| Actor网络结构 | 2×150×150×1 |
| Actor学习率 | 2e-4 |
| Actor更新次数 | 10 |
| Critic网络结构 | 2×150×150×1 |
| Critic学习率 | 4e-4 |
| Critic更新次数 | 10 |
| γ | 0.99 |
| λ | 0.95 |
| Batch-size | 64 |

Fig.4
Average reward for ROB-PPO training"


Fig.5
Response curve of attitude angle"
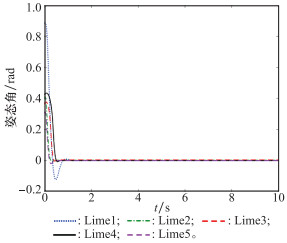

Fig.6
Response curve of attitude angle regular"


Fig.7
Comparison curve of rudder deflection angle"


Fig.8
Contrast curve of pitching attitude angle"

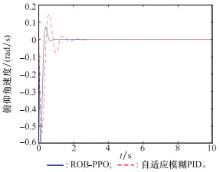
Fig.9
Pitch angle regular comparison curve"
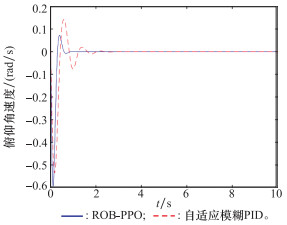

Fig.10
Comparison of elastic vibration"


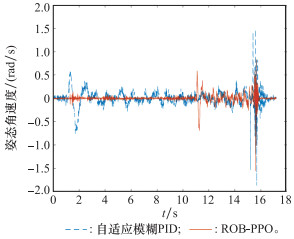
Fig.11
Comparison of rates of elastic vibration"


Fig.12
Flight process of vertical takeoff and landing vehicle"

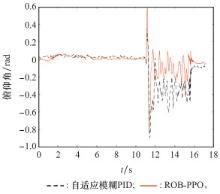
Fig.13
Comparison curve of pitch angle during flight"


Fig.14
Comparison curve of pitch angle regular during flight"
| 1 |
ZHOU Y M , ZHAO H R , LIU Y L . An evaluative review of the VTOL technologies for unmanned and manned aerial vehicles[J]. Computer Communications, 2020, 149, 356- 369.
doi: 10.1016/j.comcom.2019.10.016 |
| 2 | LIU H , LIU Y , WANG Y , et al. Recovery control strategy of reusable launch vehicle based on dynamic model[J]. Journal of Aerospace Engineering, 2019, 32 (5): 04019035. |
| 3 | HUDSON G C. History of the phoenix VTOL SSTO and recent developments in single-stage launch systems[C]//Proc. of the 4th International Space Conference of Pacific-basin Societies, 1991: 329-351. |
| 4 | COX K L. Design development of the Apollo lunar module[C]//Proc. of the NASA Washington 4th Inter-Center Control Systems Conference, 1978. |
| 5 |
FREEMAN D C , TALAY T A , AUSTIN R E . Reusable launch vehicle technology program[J]. Acta Astronautica, 1997, 41 (11): 777- 790.
doi: 10.1016/S0094-5765(97)00197-5 |
| 6 | NARUO Y, TOKUDOME S I, ISHⅡ M, et al. Design and operational aspect of LOX/LH2 propulsion system of reusable vehicle testing (RVT)[C]//Proc. of the AIAA/NAL-NASDA-ISAS 10th International Space Planes and Hypersonic Systems and Technologies Conference, 2001: 20-23. |
| 7 | DREYER L. Latest developments on SpaceX's Falcon 1 and Falcon 9 launch vehicles and Dragon spacecraft[C]//Proc. of the IEEE Aerospace Conference, 2009. |
| 8 | SAGLIANO M, TSUKAMOTO T, HEIDEIDECKER A, et al. Robust control for reusable rockets via structured H∞ synthesis[C]//Proc. of the 11th International ESA Conference on GNC Systems, 2021. |
| 9 |
SIMLICIO P , MARCOS A , BENNANI S . Reusable launchers: development of a coupled flight mechanics, guidance and control benchmark[J]. Journal of Spacecraft and Rockets, 2020, 57 (1): 74- 89.
doi: 10.2514/1.A34429 |
| 10 | WU X , XIAO B , QU Y . Modeling and sliding mode-based attitude tracking control of a quadrotor UAV with time-varying mass[J]. ISA Transactions, 2019, 126, 436- 443. |
| 11 |
ALTAN A , HACIOGLU R . Model predictive control of three-axis gimbal system mounted on UAV for real-time target tracking under external disturbances[J]. Mechanical Systems and Signal Processing, 2020, 138, 106548.
doi: 10.1016/j.ymssp.2019.106548 |
| 12 | LIU D Y , LIU H , ZHANG J S , et al. Adaptive attitude controller design for tail-sitter unmanned aerial vehicles[J]. Journal of Vibration and Control, 2021, 27 (1/2): 185- 196. |
| 13 | KUANTAMA E , VESSELENYI T , DZITAC S , et al. PID and fuzzy-PID control model for quadcopter attitude with disturbance parameter[J]. International Journal of Computers Communications & Control, 2017, 12 (4): 519- 532. |
| 14 | WANG L , ZHANG J . Adaptive fuzzy PID control of a vertical takeoff and landing aircraft[J]. ISA Transactions, 2021, 117, 308- 318. |
| 15 | SANTOSO F , GARRATT M A , ANAVATTI S G . Hybrid PD-fuzzy and PD controllers for trajectory tracking of a quadrotor unmanned aerial vehicle: autopilot designs and real-time flight tests[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2021, 51 (3): 1817- 1829. |
| 16 | LI X , LI Y . Adaptive fuzzy PID control for flexible aircraft[J]. Aerospace Science and Technology, 2021, 117, 106467. |
| 17 |
GE Z L , LI Y L , MA S X . Attitude stabilization of rocket elastic vibration based on robust observer[J]. Aerospace, 2022, 9 (12): 765.
doi: 10.3390/aerospace9120765 |
| 18 |
贾振宇, 刘子龙. 一种通过强化学习的四旋翼姿态控制算法[J]. 小型微型计算机系统, 2021, 42 (10): 2074- 2078.
doi: 10.3969/j.issn.1000-1220.2021.10.010 |
|
JIA Z Y , LIU Z L . A quadcopter attitude control algorithm via reinforcement learning[J]. Journal of Small Microcomputer Systems, 2021, 42 (10): 2074- 2078.
doi: 10.3969/j.issn.1000-1220.2021.10.010 |
|
| 19 | SANTOSO F , GARRATT M A , ANAVATTI S G . State-of-the-art intelligent flight control systems in unmanned aerial vehicles[J]. IEEE Trans.on Automation Science and Engineering, 2017, 15 (2): 613- 627. |
| 20 | YECHIEL O , GUTERMAN H . A survey of adaptive control[J]. International Robotics & Automation Journal, 2017, 3 (2): 290- 292. |
| 21 | WASLANDER S L, HOFFMANN G M, JANG J S, et al. Multi-agent quadrotor tested control design: integral sliding mode vs. reinforcement learning[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2005: 3712-3717. |
| 22 |
WAN K F , LI B , GAO X G , et al. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments[J]. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1490- 1508.
doi: 10.23919/JSEE.2021.000126 |
| 23 |
MALDONADO-RAMIREZ A , RIOS-CABRERA R , LOPEZ-JUAREZ I . A visual path-following learning approach for industrial robots using DRL[J]. Robotics and Computer-Integrated Manufacturing, 2021, 71, 102130.
doi: 10.1016/j.rcim.2021.102130 |
| 24 |
PENG Y F , TAN G Z , SI H W , et al. DRL-GAT-SA: deep reinforcement learning for autonomous driving planning based on graph attention networks and simplex architecture[J]. Journal of Systems Architecture, 2022, 126, 102505.
doi: 10.1016/j.sysarc.2022.102505 |
| 25 |
裴培, 何绍溟, 王江, 等. 一种深度强化学习制导控制一体化算法[J]. 宇航学报, 2021, 42 (10): 1293- 1304.
doi: 10.3873/j.issn.1000-1328.2021.10.010 |
|
PEI P , HE S M , WANG J , et al. Integrated guidance and control algorithm based on deep reinforcement learning[J]. Journal of Astronautics, 2021, 42 (10): 1293- 1304.
doi: 10.3873/j.issn.1000-1328.2021.10.010 |
|
| 26 | 章胜, 周攀, 何扬, 等. 基于深度强化学习的空战机动决策试验研究[J]. 航空学报, 2023, 44 (10): 122- 135. |
| ZHANG S , ZHOU P , HE Y , et al. Experimental study on air combat maneuver decision-making based on deep reinforcement learning[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (10): 122- 135. | |
| 27 |
PI C H , HU K C , CHENG S , et al. Low-level autonomous control and tracking of quadrotor using reinforcement learning[J]. Control Engineering Practice, 2020, 95, 104222.
doi: 10.1016/j.conengprac.2019.104222 |
| 28 | 徐世东. 挠性航天器振动抑制及姿态模糊控制方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| XU S D. Research on vibration suppression and attitude fuzzy control method of flexible spacecraft[D]. Harbin: Harbin Institute of Technology, 2018. | |
| 29 | 李学峰, 王青, 王辉, 等. 运载火箭飞行控制系统设计与验证[M]. 北京: 国防工业出版社, 2014: 23- 25. |
| LI X F , WANG Q , WANG H , et al. Design and verification of flight control system for launch vehicles[M]. Beijing: National Defense Industry Press, 2014: 23- 25. | |
| 30 | SCHULMAN J, WOLSKI F, DHARIWAL P, et al. Proximal policy optimization algorithms[EB/OL]. [2023-02-10]. https://arxiv.org/pdf/1707.06347.pdf. |
| 31 | RAMÓN I. VERDÉS K , YURY O , et al. Aguilar, robust observer design with prescribed settling-time bound and finite varying gains[J]. European Journal of Control, 2022, 100667. |
| 32 |
CRUZ-ZAVALA E , MORENO J A . Levant's arbitrary-order exact differentiator: a Lyapunov approach[J]. IEEE Trans.on Automatic Control, 2019, 64 (7): 3034- 3039.
doi: 10.1109/TAC.2018.2874721 |
| 33 | ZHANG Z B , LI X H , AN J P , et al. Model-free attitude control of spacecraft based on PID-guide TD3 algorithm[J]. International Journal of Aerospace Engineering, 2020, 8874619. |
| 34 | 付宇鹏, 邓向阳, 何明, 等. 基于强化学习的固定翼飞机姿态控制方法研究[J]. 控制与决策, 2023, 38 (9): 2505- 2510. |
| FU Y P , DENG X Y , HE M , et al. Research on attitude control of fixed-wing aircraft based on reinforcement learning[J]. Control and Decision, 2023, 38 (9): 2505- 2510. |
| [1] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [2] | Yuyu ZHAO, Chao SUO, Yuxiao WANG. Differential flatness-based tracking control method for hypersonic vehicle [J]. Systems Engineering and Electronics, 2024, 46(3): 1084-1092. |
| [3] | Fengguo WU, Wei TAO, Hui LI, Jianwei ZHANG, Chengchen ZHENG. UAV intelligent avoidance decisions based on deep reinforcement learning algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1702-1711. |
| [4] | Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN [J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460. |
| [5] | Siqi TANG, Zhisong PAN, Guyu HU, Yang WU, Yunbo LI. Application of deep reinforcement learning in space information network——status quo and prospects [J]. Systems Engineering and Electronics, 2023, 45(3): 886-901. |
| [6] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [7] | Lingyu MENG, Bingli GUO, Wen YANG, Xinwei ZHANG, Zuoqing ZHAO, Shanguo HUANG. Network routing optimization approach based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(7): 2311-2318. |
| [8] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [9] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| [10] | Yang XU, Mingren HAN, Jiang SHAO, Delin LUO. Attitude antagonistic consensus control of satellite swarm system based on MRPs [J]. Systems Engineering and Electronics, 2021, 43(7): 1904-1911. |
| [11] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [12] | Wen MA, Hui LI, Zhuang WANG, Zhiyong HUANG, Zhaoxin WU, Xiliang CHEN. Close air combat maneuver decision based on deep stochastic game [J]. Systems Engineering and Electronics, 2021, 43(2): 443-451. |
| [13] | Ang GAO, Qisheng GUO, Zhiming DONG, Shaoqing YANG. Research on efficiency evaluation method of multi unmanned ground vehicle system based on EAS+MADRL [J]. Systems Engineering and Electronics, 2021, 43(12): 3643-3651. |
| [14] | Kun ZHANG, Ke LI, Haotian SHI, Zhenchong ZHANG, Zekun LIU. Autonomous guidance maneuver control and decision-making algorithm [J]. Systems Engineering and Electronics, 2020, 42(7): 1567-1574. |
| [15] | Zongxing LI, Rui ZHANG. Missile adaptive attitude control based on Riccati equation [J]. Systems Engineering and Electronics, 2020, 42(6): 1358-1365. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||