Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (11): 3486-3495.doi: 10.12305/j.issn.1001-506X.2022.11.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Target search path planning for naval battle field based on deep reinforcement learning
Qingqing YANG, Yingying GAO*, Yu GUO, Boyuan XIA, Kewei YANG
- College of Systems Engineering, National University of Defense Technology, Changsha 410073, China
-
Received:2021-09-01Online:2022-10-26Published:2022-10-29 -
Contact:Yingying GAO
CLC Number:
Cite this article
Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495.
share this article
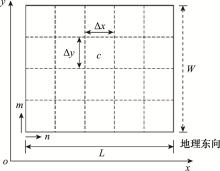
Fig.1
Search map formal description schematic"

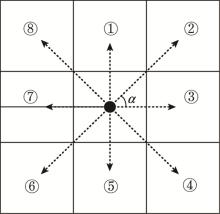
Fig.2
Action space"
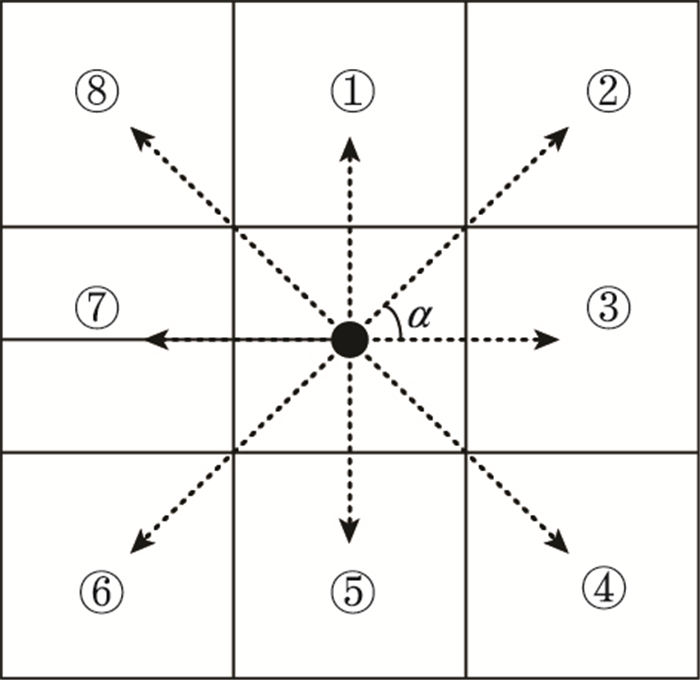
Table 1
State vector normalized description"
| 要素 | 数据类似 | 转化方法 | 转化后长度 |
| 区域大小 | 数值 | 独热编码 | 2 |
| 区域当前POC矩阵 | 数值 | 独热编码 | Lx×Ly |
| 区域各栅格是否被搜索过 | 布尔型 | 独热编码 | Lx×Ly |
| 当前动作 | 枚举 | 定量化映射 | 1 |
| 初始位置 | 数值 | 独热编码 | 2 |

Fig.3
Schematic diagram of dueling network structure"

Fig.4
Distributional network structure diagram"


Fig.5
Deep reinforcement learning algorithm framework for target search planning in naval battle field"
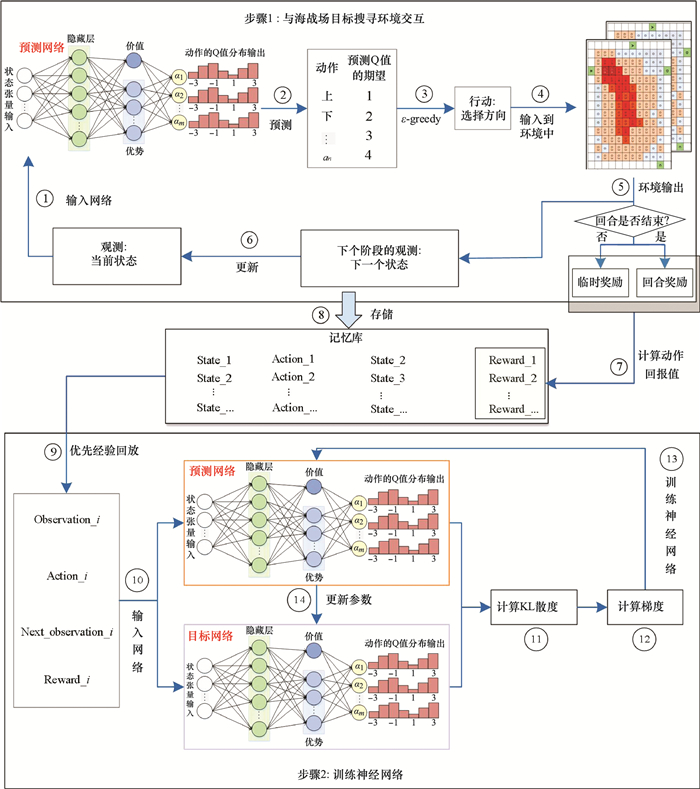

Fig.6
POC predictive heat map of search area"
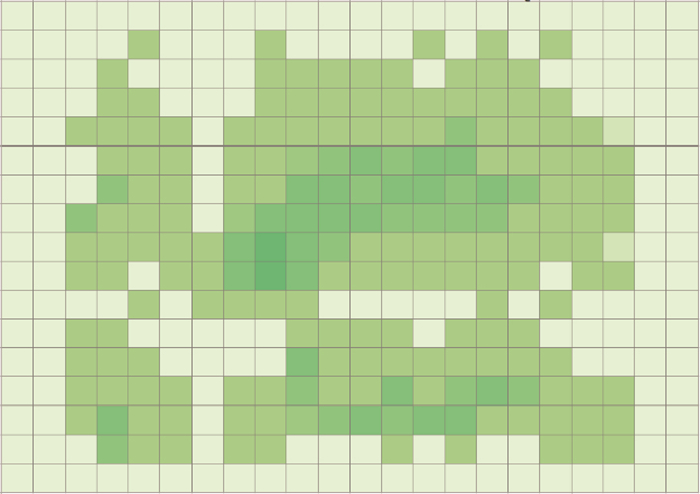
Fig.7
The initial POC matrix predicted in search and rescue scenario"
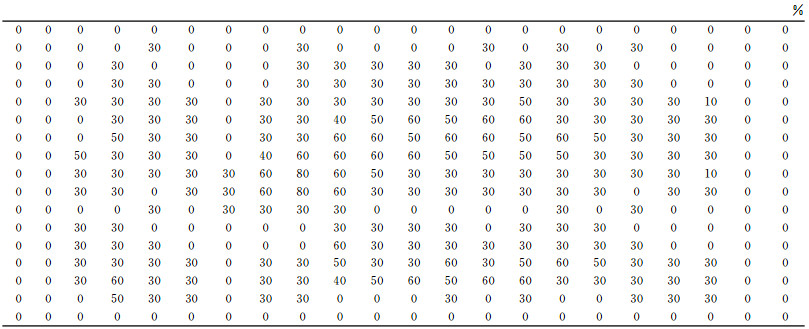
Fig.8
Normalized POC matrix"

Table 2
Experimental parameters setting"
| 参数名称 | 参数大小 | 参数名称 | 参数大小 | |
| 隐含层个数 | 1 | 累计回报折扣因子 | 0.5 | |
| 隐含层神经元个数 | 1 500 | ε-greedy探索率 | 0.9 | |
| 输出层神经元个数 | 8 | 目标网络更新间隔步数 | 300 | |
| 神经元激活函数 | ReLU | 经验池容量 | 104 | |
| 神经网络学习率 | 0.001 | 经验块最小容量 | 200 | |
| 动作划分个数 | 8 | 模型训练次数 | 105 |
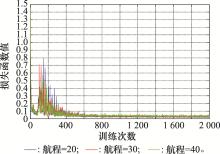
Fig.9
Loss value curve under different voyage"

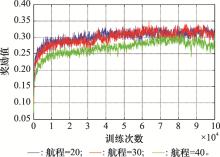
Fig.10
Bonus curves under different voyages"
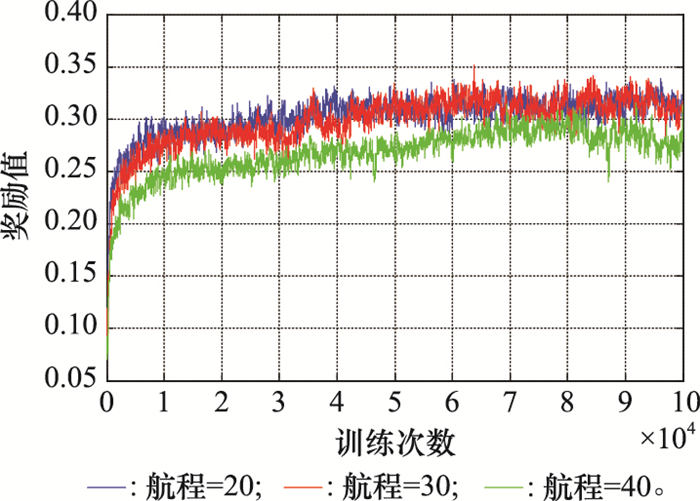
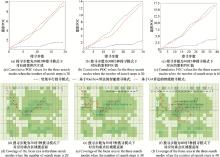
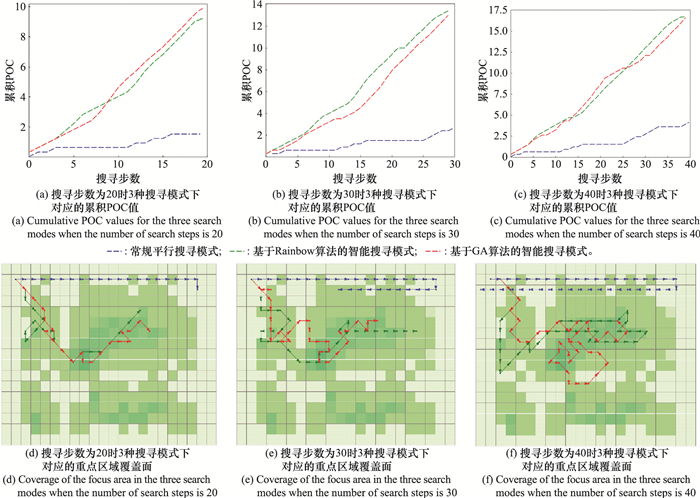
Fig.11
Test results under different voyages"
| 1 |
OTOTE D A , LI B , AI B , et al. A decision-making algorithm for maritime search and rescue plan[J]. Sustainability, 2019, 11 (7): 2084- 2099.
doi: 10.3390/su11072084 |
| 2 |
JIN Y Q , WANG N , SONG Y T , et al. Optimization model and algorithm to locate rescue bases and allocate rescue vessels in remote oceans[J]. Soft Computing, 2021, 25 (4): 3317- 3334.
doi: 10.1007/s00500-020-05378-6 |
| 3 |
GUO Y , YE Y Q , YANG Q Q , et al. A multi-objective INLP model of sustainable resource allocation for long-range maritime search and rescue[J]. Sustainability, 2019, 11 (3): 929- 953.
doi: 10.3390/su11030929 |
| 4 | RAHMES M, CHESTER D, HUNT J, et al. Optimizing cooperative cognitive search and rescue UAVs[C]//Proc. of the Autonomous Systems: Sensors, Vehicles, Security and the Internet of Everything, 2018. |
| 5 |
LIANG X Y , DU X S , WANG G L , et al. A deep reinforcement learning network for traffic light cycle control[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (2): 1243- 1253.
doi: 10.1109/TVT.2018.2890726 |
| 6 |
WANG Y D , LIU H , ZHENG W B , et al. Multi-objective workflow scheduling with deep-Q-network-based multi-agent reinforcement learning[J]. IEEE Access, 2019, 7, 39974- 39982.
doi: 10.1109/ACCESS.2019.2902846 |
| 7 |
LUONG N C , HOANG D T , GONG S , et al. Applications of deep reinforcement learning in communications and networking: a survey[J]. IEEE Communications Surveys and Tutorials, 2019, 21 (4): 3133- 3174.
doi: 10.1109/COMST.2019.2916583 |
| 8 |
MNIH V , KAVUKCUOGLU K , SILVER D , et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518 (7540): 529- 533.
doi: 10.1038/nature14236 |
| 9 | 史腾飞, 王莉, 黄子蓉. 序列多智能体强化学习算法[J]. 模式识别与人工智能, 2021, 34 (3): 206- 213. |
| SHI T F , WANG L , HUANG Z R . Sequence to sequence multi-agent reinforcement learning algorithm[J]. Pattern Recognition and Artificial Intelligence, 2021, 34 (3): 206- 213. | |
| 10 | MNIH V, KAVUKCUOGLU K, SILVER D, et al. Playing atari with deep reinforcement learning[EB/OL]. [2021-10-12]. https://arxiv.org/abs/1312.5602. |
| 11 | SCHAUL T, QUAN J, ANTONOGLOU I, et al. Prioritized experience replay[EB/OL]. [2021-10-12]. https://arxiv.org/abs/1511.05952. |
| 12 | VAN H H, GUEZ A, SILVER D. Deep reinforcement learning with double q-learning[C]//Proc. of the AAAI conference on Artificial Intelligence, 2016. |
| 13 | WANG Z Y, SCHAUL T, HESSEL M, et al. Dueling network architectures for deep reinforcement learning[C]//Proc. of the International Conference on Machine Learning, 2016: 1995-2003. |
| 14 | BELLEMARE M G, DABNEY W, MUNOS R. A distributional perspective on reinforcement learning[C]//Proc. of the International Conference on Machine Learning, 2017: 449-458. |
| 15 | FORTUNATO M, AZAR M G, PIOT B, et al. Noisy networks for exploration[EB/OL]. [2021-10-12]. https://arxiv.org/abs/1706.10295. |
| 16 | HESSEL M, MODAYIL J, VAN H H, et al. Rainbow: combining improvements in deep reinforcement learning[C]//Proc. of the National Conference on Artificial Intelligence, 2018. |
| 17 | SUTTON R S , BARTO A G . Reinforcement learning: an introduction[M]. Cambridge: Massachusetts Institute of Technology press, 1998. |
| 18 | SUTTON R S . Learning to predict by the methods of temporal differences[J]. Machine learning, 1988, 3 (1): 9- 44. |
| 19 | HAUSKNECHT M, STONE P. Deep recurrent Q-learning for partially observable MDPs[EB/OL]. [2021-10-12]. https://arxiv.org/abs/1507.06527v4. |
| 20 |
轩永波, 黄长强, 吴文超, 等. 运动目标的多无人机编队覆盖搜索决策[J]. 系统工程与电子技术, 2013, 35 (3): 539- 544.
doi: 10.3969/j.issn.1001-506X.2013.03.15 |
|
XUN Y B , HUANG C Q , WU W C , et al. Coverage search strategies for moving targets using multiple unmanned aerial vehicle teams[J]. Systems Engineering and Electronics, 2013, 35 (3): 539- 544.
doi: 10.3969/j.issn.1001-506X.2013.03.15 |
|
| 21 | 高盈盈. 海上搜救中无人机搜寻规划方法及应用研究[D]. 长沙: 国防科技大学, 2020. |
| GAO Y Y. Research on UAV search planning method and application in maritime search and rescue[D]. Changsha: National University of Defense Technology, 2020. | |
| 22 |
XIONG W T , GELDER P V , YANG K W . A decision support method for design and operationalization of search and rescue in maritime emergency[J]. Ocean Engineering, 2020, 207, 107399- 107415.
doi: 10.1016/j.oceaneng.2020.107399 |
| 23 |
GALLEGO A J , PERTUSA A , GIL P , et al. Detection of bodies in maritime rescue operations using unmanned aerial vehicles with multispectral cameras[J]. Journal of Field Robotics, 2019, 36 (4): 782- 796.
doi: 10.1002/rob.21849 |
| 24 | 高春庆, 寇英信, 李战武, 等. 小型无人机协同覆盖侦察路径规划[J]. 系统工程与电子技术, 2019, 41 (6): 1294- 1299. |
| GAO C Q , KOU Y X , LI Z W . Cooperative coverage path planning for small UAVs[J]. Systems Engineering and Electronics, 2019, 41 (6): 1294- 1299. | |
| 25 |
YUE W , GUAN X H , WANG L Y . A novel searching method using reinforcement learning scheme for multi-UAVs in unknown environments[J]. Applied Sciences, 2019, 9 (22): 4964- 4978.
doi: 10.3390/app9224964 |
| 26 |
CHENG Y , ZHANG W D . Concise deep reinforcement learning obstacle avoidance for underactuated unmanned marine vessels[J]. Neurocomputing, 2018, 272, 63- 73.
doi: 10.1016/j.neucom.2017.06.066 |
| 27 |
LI R P , ZHAO Z F , SUN Q , et al. Deep reinforcement learning for resource management in network slicing[J]. IEEE Access, 2018, 6, 74429- 74441.
doi: 10.1109/ACCESS.2018.2881964 |
| 28 | TAMPUU A , MATⅡSEN T , KODELJA D , et al. Multiagent cooperation and competition with deep reinforcement learning[J]. Plos One, 2017, 12 (4): e0172395. |
| [1] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [2] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [3] | Lingyu MENG, Bingli GUO, Wen YANG, Xinwei ZHANG, Zuoqing ZHAO, Shanguo HUANG. Network routing optimization approach based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(7): 2311-2318. |
| [4] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [5] | Xiaomin ZHU, Daqian LIU, Bowen FEI, Tong MEN. Cooperative search method for multiple UAVs under local communication [J]. Systems Engineering and Electronics, 2022, 44(12): 3783-3791. |
| [6] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [7] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [8] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [9] | Jinming DU, Yunhua WU, Zhiming CHEN, bing HUA, Xinyi XU, yi ZHU, Chengfei YUE. Latent area prediction and search method for marine moving targets using game theory [J]. Systems Engineering and Electronics, 2021, 43(9): 2508-2515. |
| [10] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [11] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| [12] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [13] | Wen MA, Hui LI, Zhuang WANG, Zhiyong HUANG, Zhaoxin WU, Xiliang CHEN. Close air combat maneuver decision based on deep stochastic game [J]. Systems Engineering and Electronics, 2021, 43(2): 443-451. |
| [14] | Wenming WANG, Jialu DU. Agent path planning based on regular hexagon grid JPS algorithm [J]. Systems Engineering and Electronics, 2021, 43(12): 3635-3642. |
| [15] | Ang GAO, Qisheng GUO, Zhiming DONG, Shaoqing YANG. Research on efficiency evaluation method of multi unmanned ground vehicle system based on EAS+MADRL [J]. Systems Engineering and Electronics, 2021, 43(12): 3643-3651. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||