
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (2): 684-693.doi: 10.12305/j.issn.1001-506X.2026.02.28
李淑凤, 韩璐羽
收稿日期:2024-12-12
修回日期:2025-04-14
出版日期:2025-06-11
发布日期:2025-06-11
通讯作者:
李淑凤
作者简介:韩璐羽(2001—),女,硕士研究生,主要研究方向为面向民机维护的无人机编队技术
基金资助:Shufeng LI, Luyu HAN
Received:2024-12-12
Revised:2025-04-14
Online:2025-06-11
Published:2025-06-11
Contact:
Shufeng LI
摘要:
为了确保飞机飞行安全并及时发现潜在缺陷,飞机表面巡检变得尤为重要。传统人工巡检人力成本高、效率低下,无人机自动化巡检可以极大降低检测成本、提高检测效率。本文提出一种面向飞机表面巡检任务的多无人机覆盖路径规划方案,目的是优化覆盖率并提高巡检效率。结合采用自组织映射(self-organizing map,Som)神经网络和K-means算法,对飞机三维点云模型进行区域划分,在淘金优化(gold rush optimizer, GRO)算法基础上加入路径转弯惩罚项和协同约束,规划无人机群覆盖路径。考虑无人机群能源消耗的情况下,缩短路径长度和完成时间。仿真结果表明,所提方案在覆盖率方面达到99.98%,时间比单机缩短74.6%。
中图分类号:
李淑凤, 韩璐羽. 面向飞机表面巡检的多无人机覆盖路径规划[J]. 系统工程与电子技术, 2026, 48(2): 684-693.
Shufeng LI, Luyu HAN. Multi-UAV coverage path planning for aircraft surface inspection[J]. Systems Engineering and Electronics, 2026, 48(2): 684-693.

图1
MCPP流程"

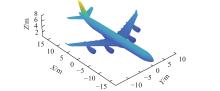
图2
A340点云模型"
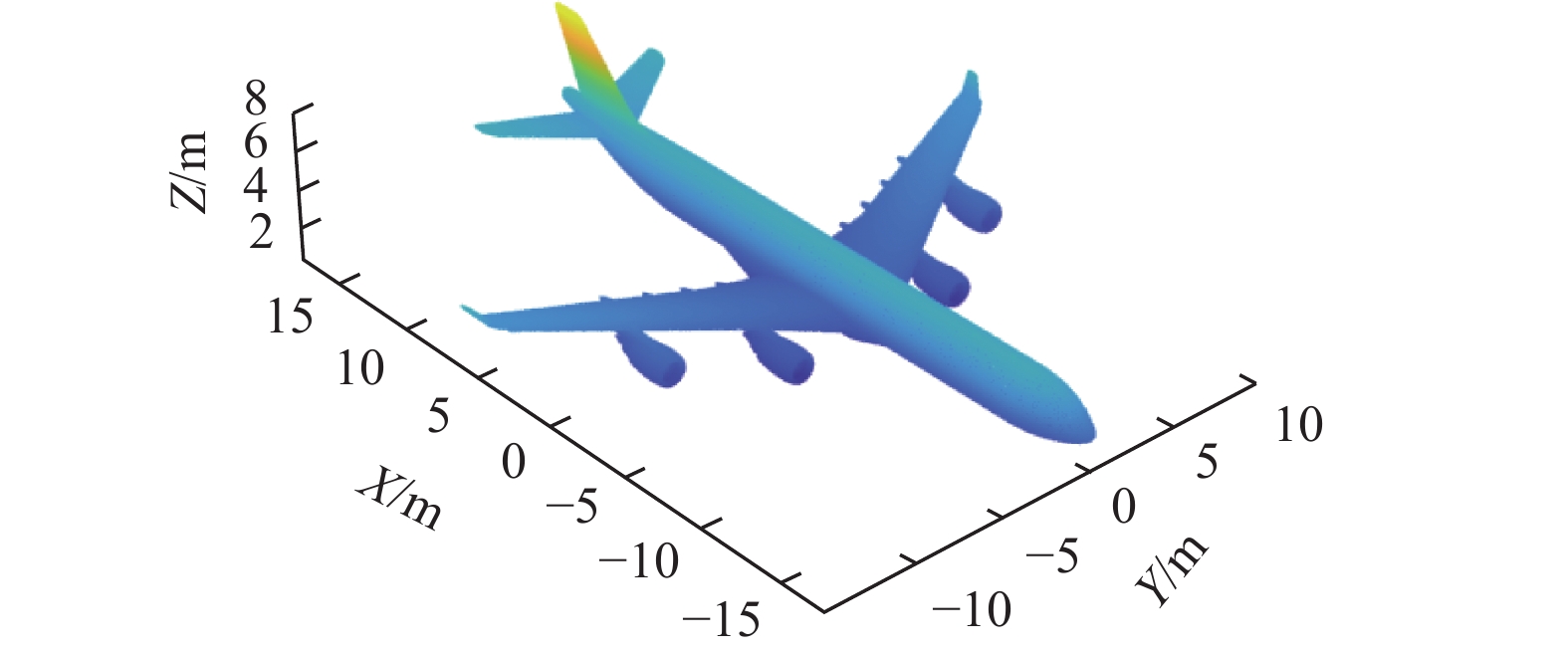
表1
传感器参数设置"
| 无人机参数 | 参数设置 |
| 探测角/(°) | 60 |
| 分辨率/px | |
| 帧率/fps | 30 |

图3
无人机覆盖范围"
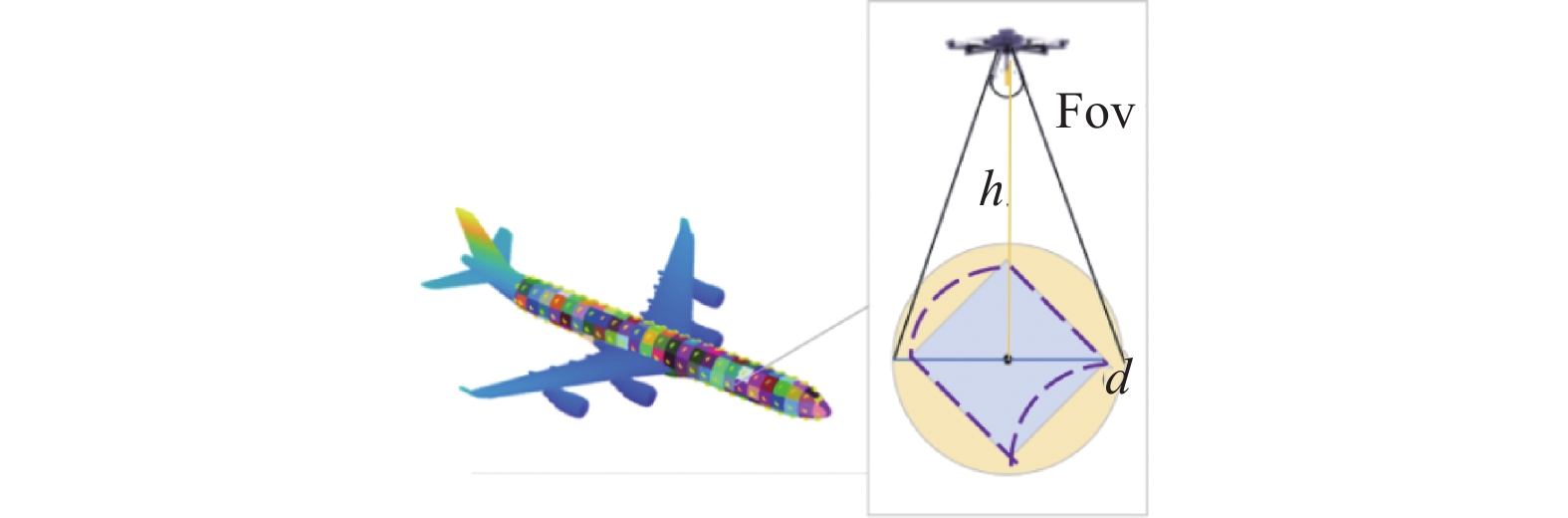

图4
A340模型划分"
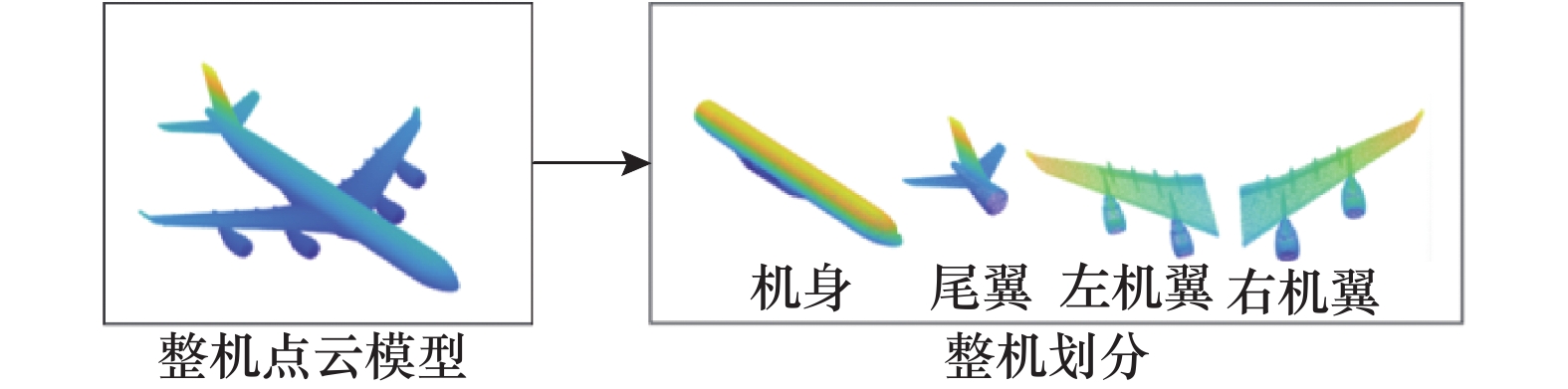
表2
飞机各区域覆盖率"
| 飞机划分区域 | 采样网格设置 | 视点数量 | 覆盖率/% |
| 机身 | 1.2 | 215 | 100.00 |
| 左机翼 | 1.2 | 59 | 96.59 |
| 右机翼 | 1.2 | 59 | 96.59 |
| 尾翼 | 1.2 | 34 | 90.21 |
表3
采样网格参数设置"
| 飞机划分区域 | 采样网格设置 | 视点数量 | 覆盖率/% |
| 机身 | 1.2 | 215 | 100.00 |
| 左机翼 | 1.16 | 96 | 99.96 |
| 右机翼 | 1.16 | 96 | 99.96 |
| 尾翼 | 1.15 | 58 | 99.98 |

图5
机身法向量方向"
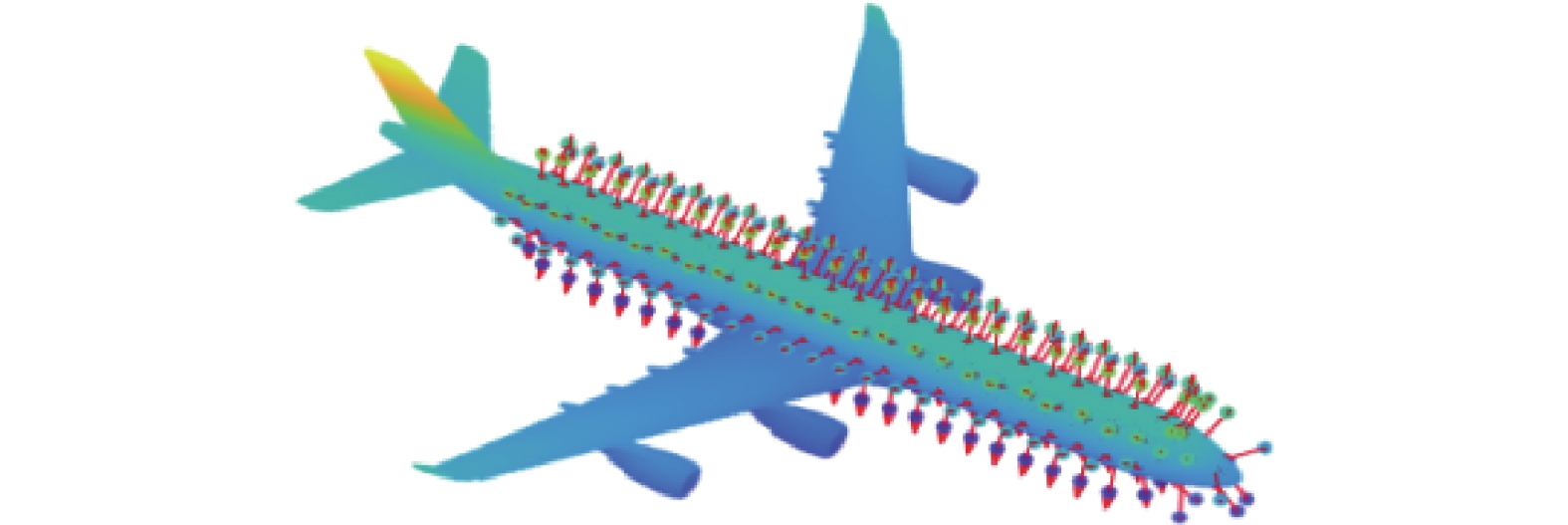

图6
覆盖视点生成"

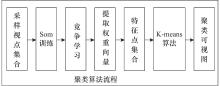
图7
聚类算法流程图"
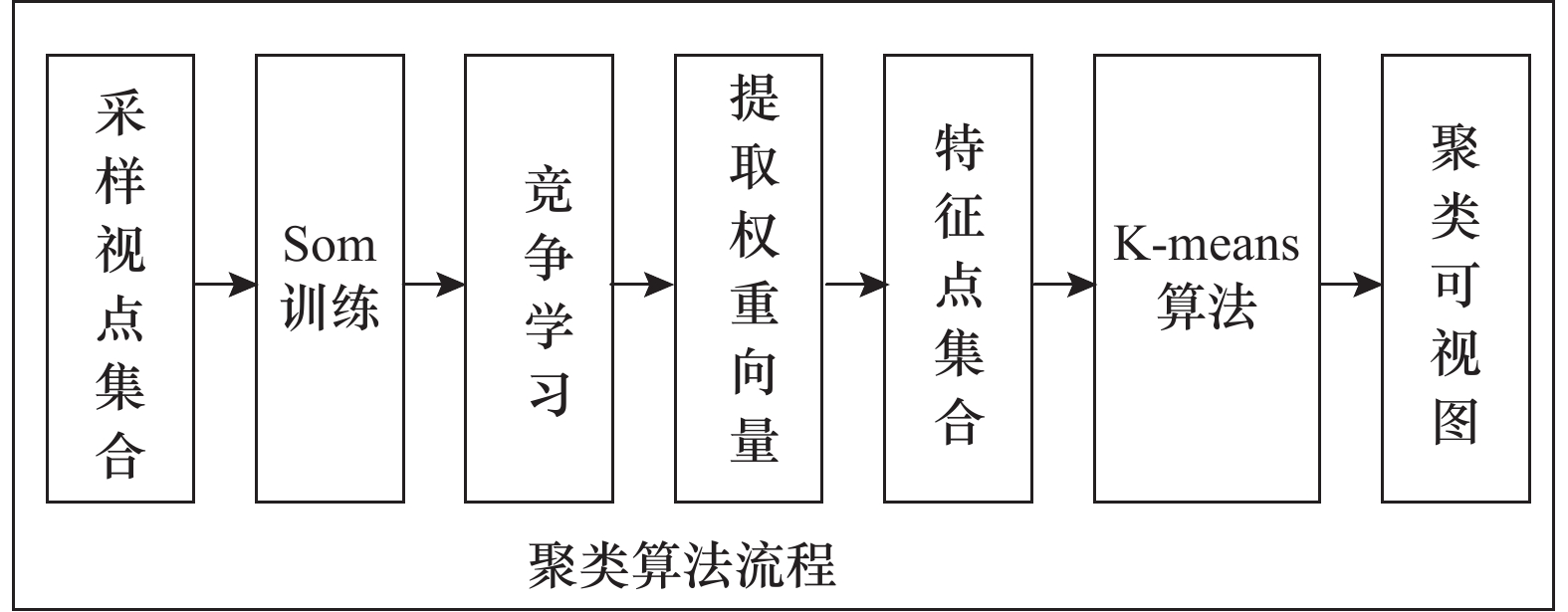
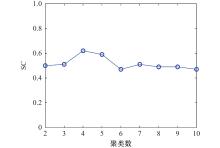
图8
聚类数与SC关系图"
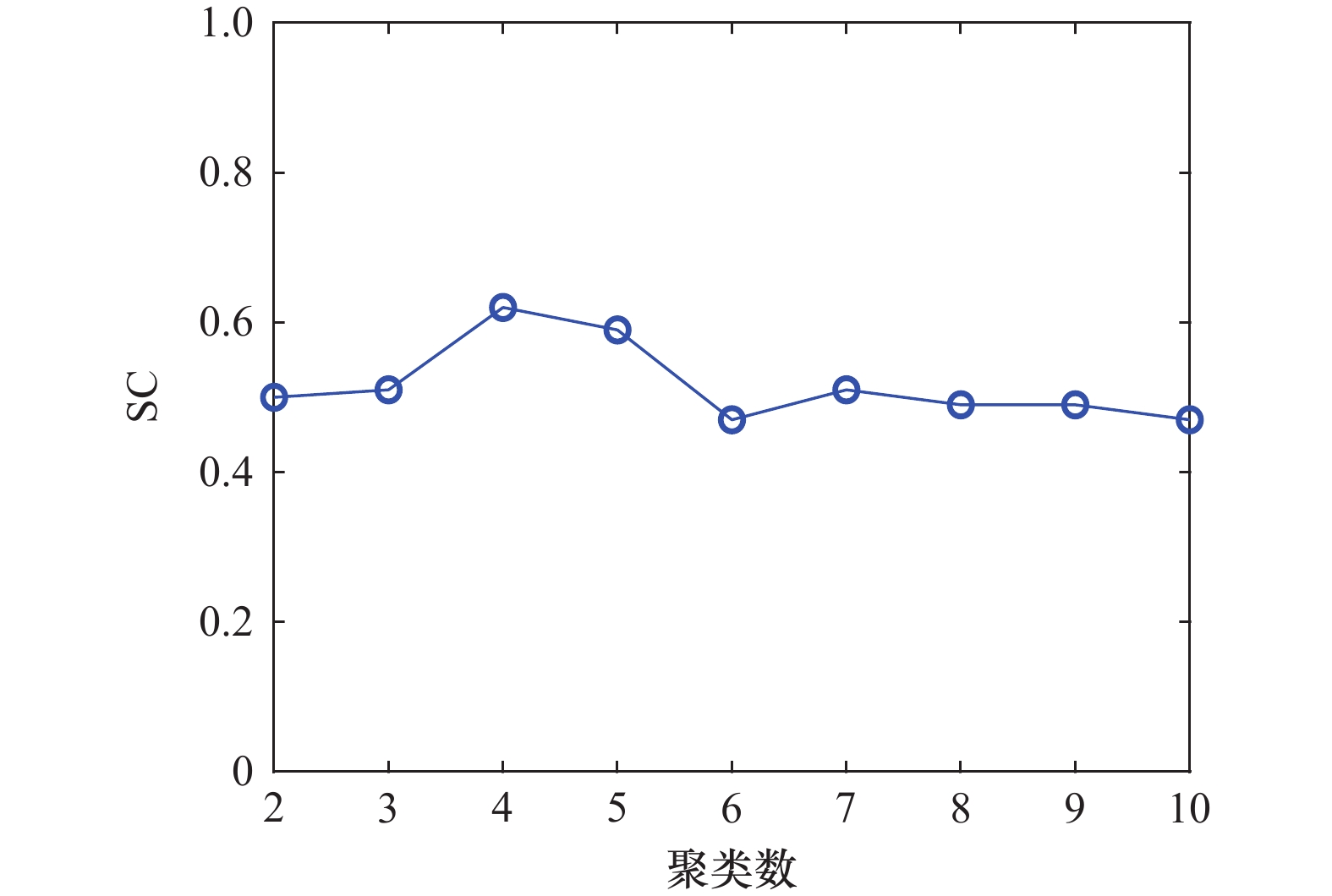

图9
聚类划分结果示意图"
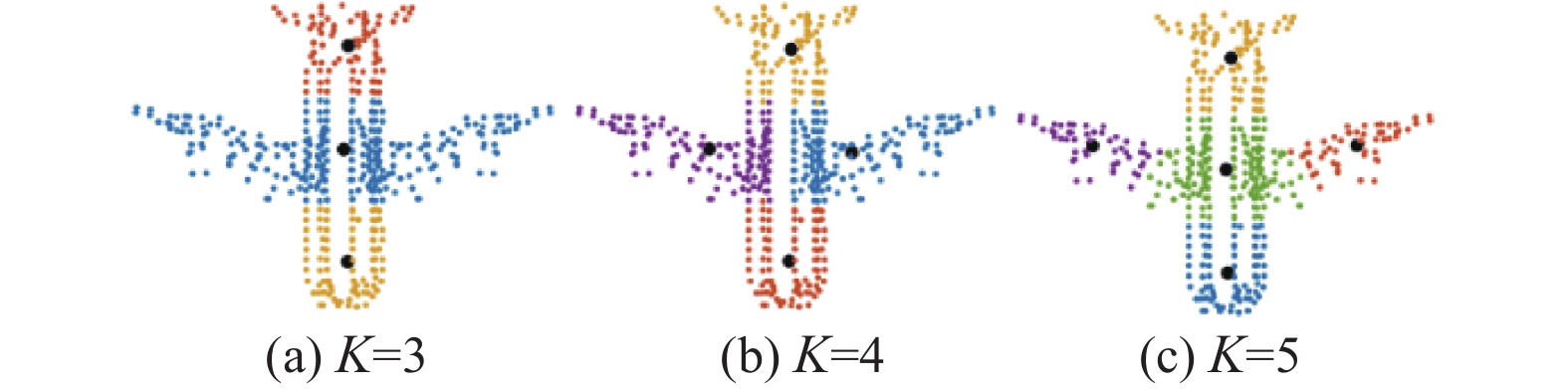

图10
右机翼初始GRO规划"


图11
右机翼改进GRO规划"
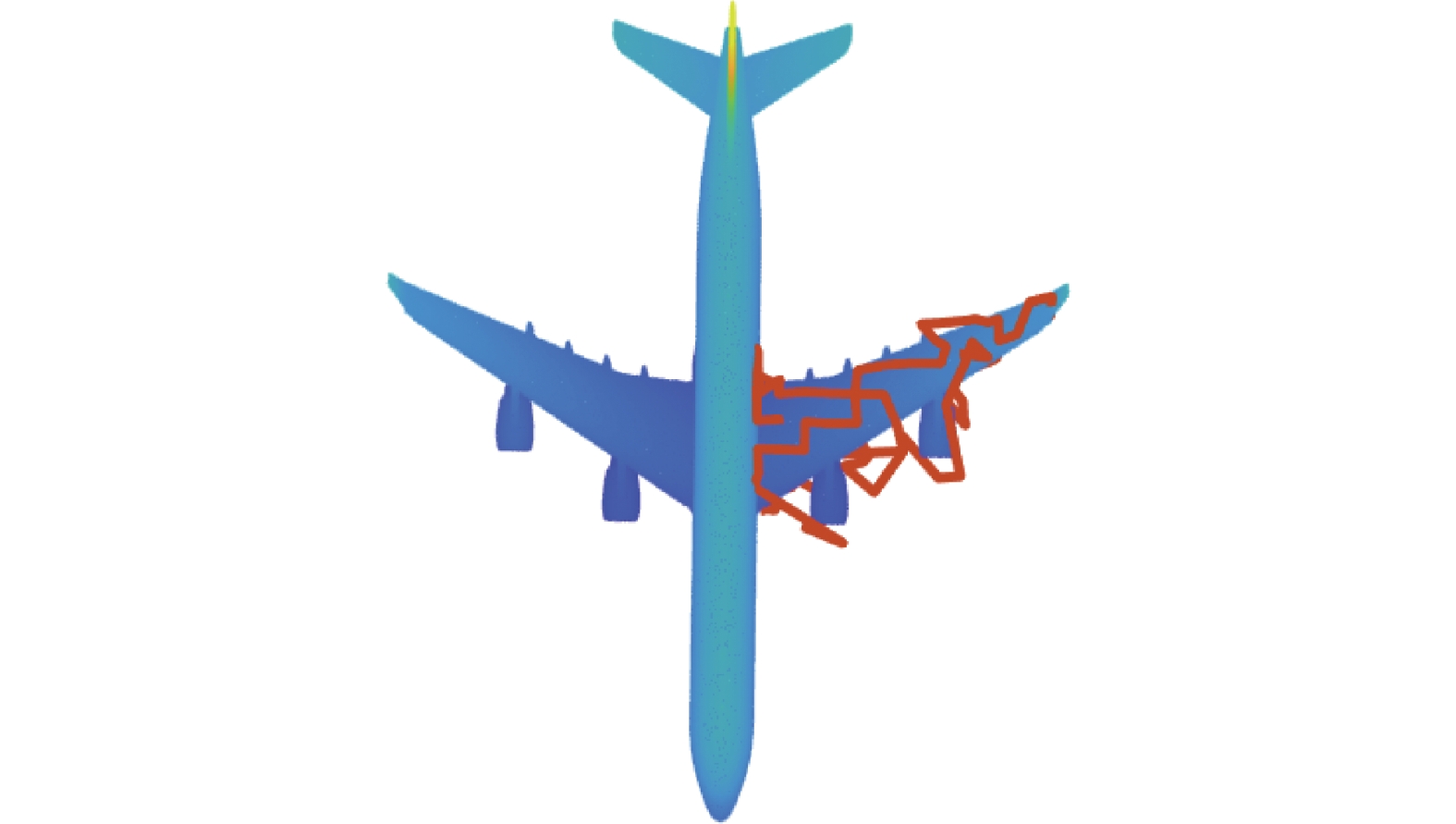

图12
整机路径规划"
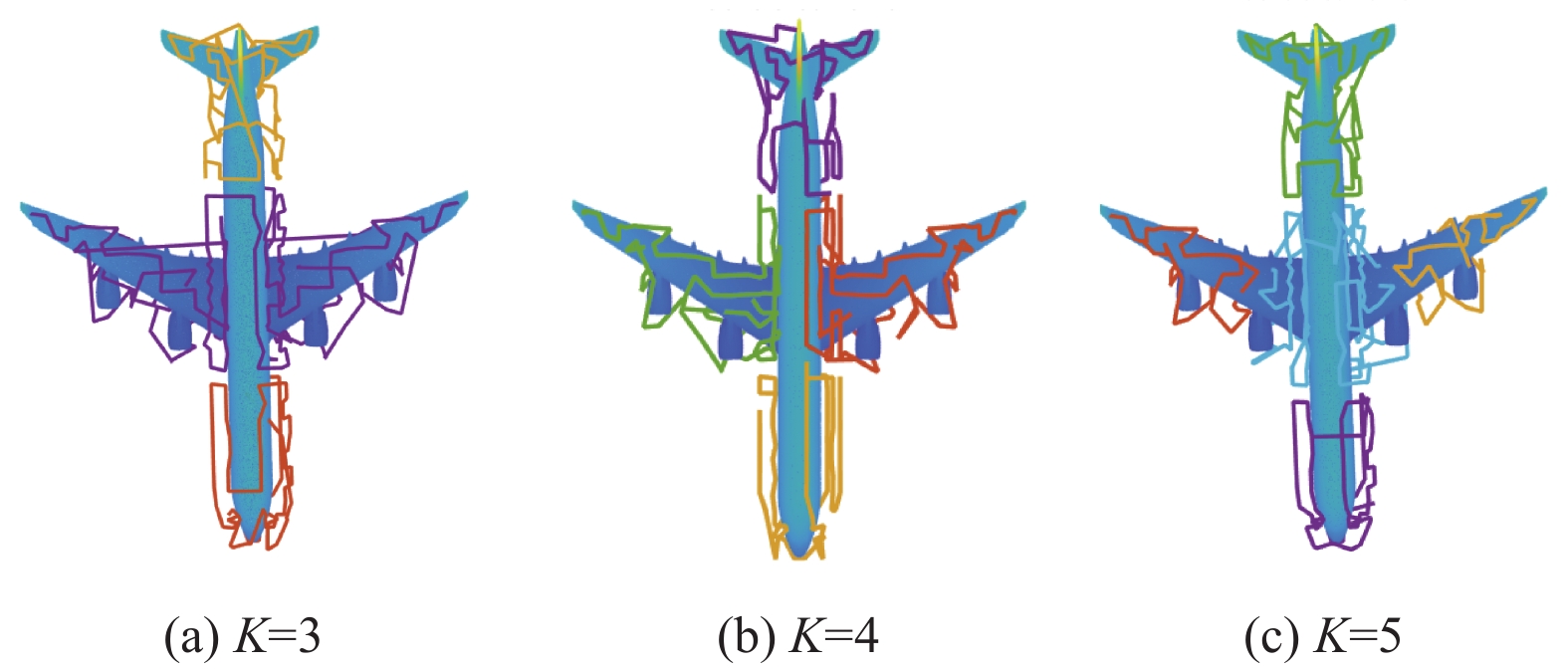
表4
不同聚类算法结果对比"
| 算法 | 路径长度 | ||
| 3簇 | 4簇 | 5簇 | |
| Som | 613.17 | 605.90 | 622.03 |
| K-means | 633.30 | 612.63 | 621.85 |
| Som-K-means | 610.67 | 593.89 | 620.66 |
表5
改进 GRO 与传统算法路径指标对比"
| 算法 | 4架无人机总路径 长度/m | 急转弯数量/次 |
| GRO | 866.71 | 189 |
| ACO | 202 | |
| SA | 851.11 | 186 |
| 改进GRO | 593.89 | 142 |

图13
路径规划可视图"
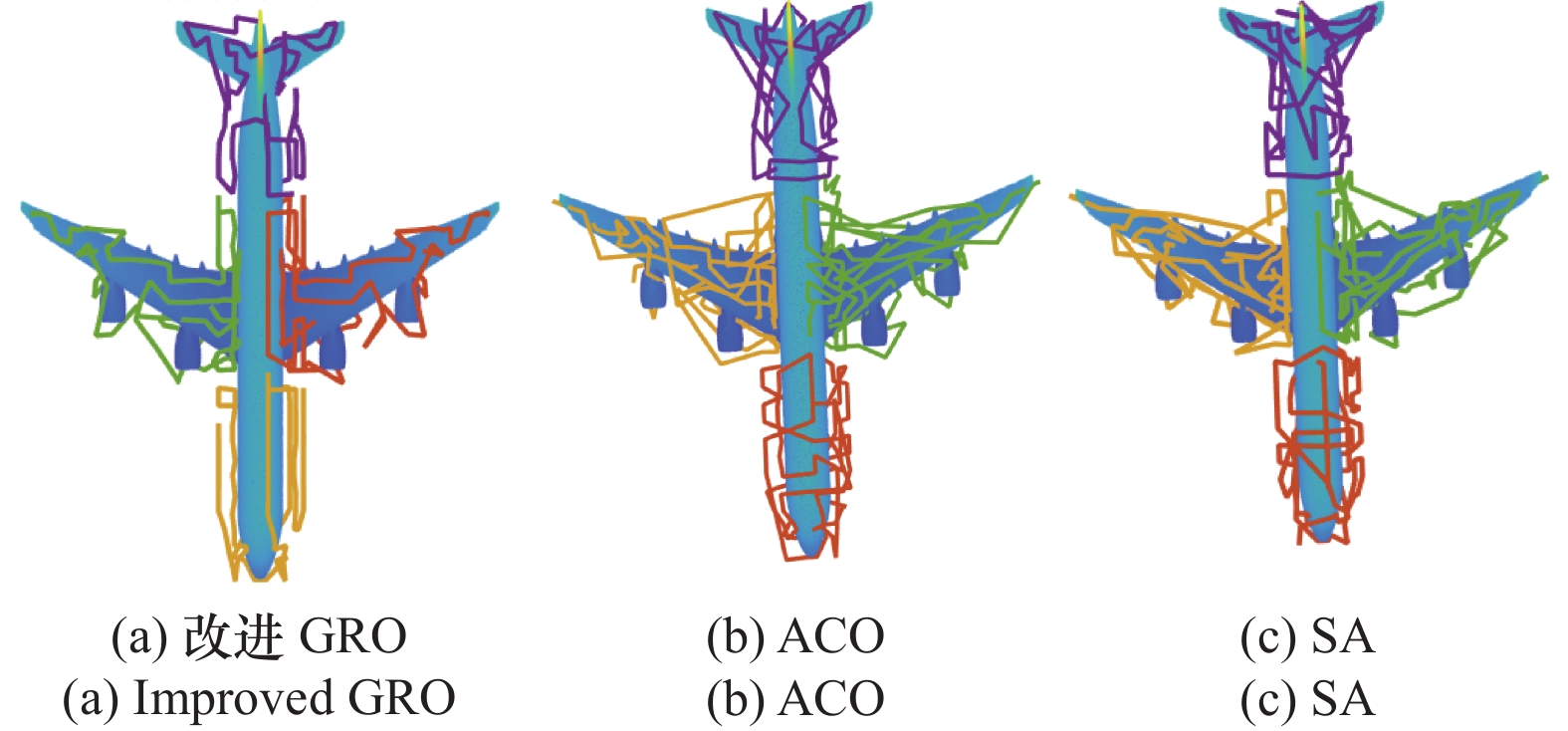
表6
无人机路径长度分配"
| 4架无人机分配 | 路径长度/ m | 时间容差/ min | 完成时间/ min | 能量消耗/ (J/m) |
| 第1架 | 161.08 | 0.4 | 5.37 | 80.54 |
| 第2架 | 163.57 | 0.5 | 5.45 | 81.78 |
| 第3架 | 136.50 | 0.4 | 4.55 | 68.25 |
| 第4架 | 132.74 | 0.5 | 4.42 | 66.37 |
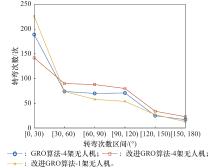
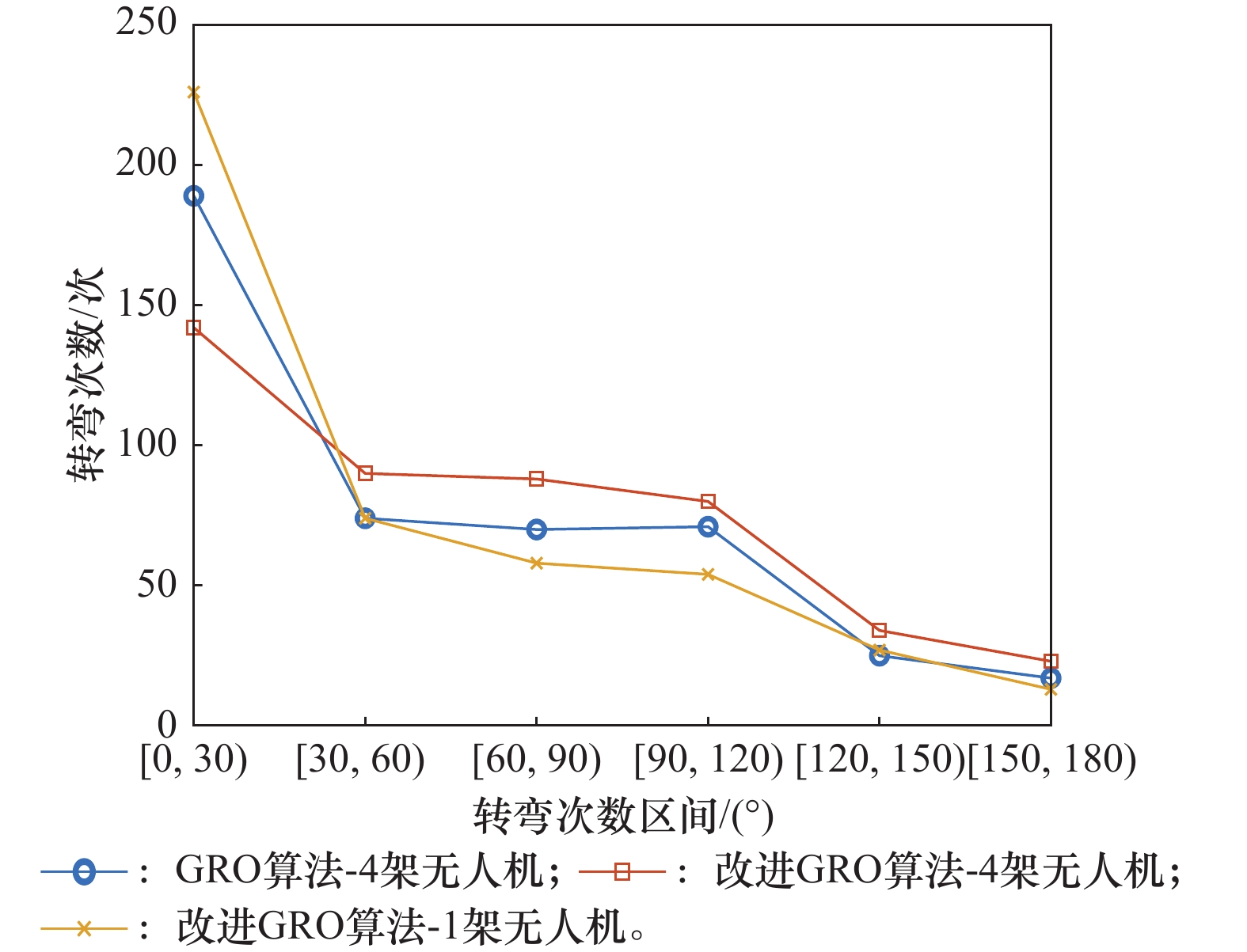
图14
转弯次数统计"
| 1 | LIU Y P, DONG J X, LI Y D, et al. A UAV-based aircraft surface defect inspection system via external constraints and deep learning[J]. IEEE Trans. on Instrumentation and Measurement, 2022, 71, 5019315. |
| 2 |
ZHANG Y D, WANG W, GUO Z H, et al. Research on oriented surface defect detection in the aircraft skin-coating process based on an attention detector[J]. IET Image Process, 2024, 18 (5): 1213- 1228.
doi: 10.1049/ipr2.13020 |
| 3 |
DIDIER A R, CRISTIAN L T. Inspection of aircrafts and airports using UAS: a review[J]. Results in Engineering, 2024, 22, 102330- 102343.
doi: 10.1016/j.rineng.2024.102330 |
| 4 |
AVDELIDIS N P, TSOURDOS A. LAFIOSCA P, et al. Defects recognition algorithm development from visual UAV inspections[J]. Sensors, 2022, 22 (13): 4682- 4694.
doi: 10.3390/s22134682 |
| 5 |
FEVGAS G, LAGKAS T, ARGYRIOU V, et al. Coverage path planning methods focusing on energy efficient and cooperative strategies for unmanned aerial vehicles[J]. Sensors, 2022, 22 (3): 1235- 1254.
doi: 10.3390/s22031235 |
| 6 |
TAN C S, MOHD-MOKHTAR R, ARSHAD M R. A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms[J]. IEEE Access, 2021, 9, 119310- 119342.
doi: 10.1109/ACCESS.2021.3108177 |
| 7 |
EMILE G, PASQUALE F, DARIUSZ C. Coverage path planning with targeted viewpoint sampling for robotic free-form surface inspection[J]. Robotics and Computer-Integrated, 2020, 61, 101843.
doi: 10.1016/j.rcim.2019.101843 |
| 8 |
KRISHAN K, NEERAJ K. Region coverage-aware path planning for unmanned aerial vehicles: a systematic review[J]. Physical Communication, 2023, 59, 102073- 102094.
doi: 10.1016/j.phycom.2023.102073 |
| 9 |
SUI H G, ZHANG H, GOU G H, et al. Multi-UAV cooperative and continuous path planning for high-resolution 3D scene reconstruction[J]. Drones, 2023, 7 (9): 544- 569.
doi: 10.3390/drones7090544 |
| 10 | ZHOU Y, XIONG Y H. Multi-UAV coverage path planning method based on improved particle swarm optimization[C]// Proc. of the China Automation Congress, 2024: 2364−2369. |
| 11 |
CHEN J C, LING F Y, ZHANG Y, et al. Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system[J]. Swarm and Evolutionary Computation, 2022, 69, 101005.
doi: 10.1016/j.swevo.2021.101005 |
| 12 |
FU Z J, MAO Y H, HE D J, et al. Secure multi-UAV collaborative task allocation[J]. IEEE Access, 2019, 7, 35579- 35587.
doi: 10.1109/ACCESS.2019.2902221 |
| 13 | ZHAO W Z, LIU Y H, LI Y Z, et al. Multi-robot coverage path planning for dimensional inspection of large free-form surfaces based on hierarchical optimization[J]. The International Journal of Advanced Manufacturing Technology, 2023, 127 (11): 5471- 5486. |
| 14 |
HU H W, FU Z F, LIU Z. Research on collaborative inspection key technologies for multi-UAVs and multi-nests[J]. AIP Advances, 2024, 14 (6): 065208.
doi: 10.1063/5.0212773 |
| 15 |
NI J J, GU Y, TANG G Y, et al. Cooperative coverage path planning for multi-mobile robots based on improved K-means clustering and deep reinforcement learning[J]. Electronics, 2024, 13 (5): 944- 960.
doi: 10.3390/electronics13050944 |
| 16 |
YUAN Y D, YANG P, JIANG H B, et al. A multi-robot task allocation method based on the synergy of the K-means++ algorithm and the particle swarm algorithm[J]. Biomimetics, 2024, 9 (11): 694- 713.
doi: 10.3390/biomimetics9110694 |
| 17 | 罗志远, 丰硕, 刘小峰, 等. 一种基于分步遗传算法的多无人清洁车区域覆盖路径规划方法[J]. 电子测量与仪器学报, 2020, 34 (8): 43- 50. |
| LUO Z Y, FENG S, LIU X F, et al. A multi-unmanned cleaning vehicle area coverage path planning method based on stepwise genetic algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2020, 34 (8): 43- 50. | |
| 18 | 於世振. 面向目标跟踪的无人机集群任务分配与路径规划方法研究[D]. 沈阳: 沈阳工业大学, 2023. |
| YU S Z. Research on task allocation and path planning methods for UAV swarm targeting tracking[D]. Shenyang: Shenyang University of Technology, 2023. | |
| 19 |
ZHAO B C, HUO M Y, ZHENG L, et al. Clustering-based hyper-heuristic algorithm for multi-region coverage path planning of heterogeneous UAVs[J]. Neurocomputing, 2024, 610, 128528.
doi: 10.1016/j.neucom.2024.128528 |
| 20 |
JAEHAN I, BYUNG-YOON L. Multi-agent inspection path planning with large-scale vehicle routing problem[J]. Journal of Aerospace Information Systems, 2023, 20 (7): 378- 386.
doi: 10.2514/1.I011202 |
| 21 | 罗刚, 秦小林. 多无人机编队分组覆盖路径规划算法[J]. 计算机应用, 2022, 42 (S02): 148- 154. |
| LUO G, QIN X L. Multi-UAV formation grouping coverage path planning algorithm[J]. Journal of Computer Applications, 2022, 42 (S02): 148- 154. | |
| 22 |
赵玉花, 石永康, 万晓燕. 基于粒子群优化的多无人机区域覆盖航迹规划[J]. 农机化研究, 2024, 46 (6): 63- 67.
doi: 10.3969/j.issn.1003-188X.2024.06.009 |
|
ZHAO Y H, SHI Y K, WAN X Y. Multi-UAV region coverage trajectory planning based on particle swarm optimization[J]. Journal of Agricultural Mechanization Research, 2024, 46 (6): 63- 67.
doi: 10.3969/j.issn.1003-188X.2024.06.009 |
|
| 23 |
VOLKAN P, PERIHAN P. An efficient path planning approach for autonomous multi-UAV system in target coverage problems[J]. Aircraft Engineering and Aerospace Technology, 2024, 96 (5): 690- 706.
doi: 10.1108/AEAT-10-2023-0258 |
| 24 |
HU W J, YAO Y, LIU S M, et al. Multi-UAV coverage path planning: a distributed online cooperation method[J]. IEEE Trans. on Vehicular Technology, 2023, 72 (9): 11727- 11740.
doi: 10.1109/TVT.2023.3266817 |
| 25 |
阮姗娜, 陈俊风, 顾菁, 等. 一种基于邻域搜索机制的旅行商问题求解[J]. 微处理机, 2015, 36 (6): 44- 46.
doi: 10.3969/j.issn.1002-2279.2015.06.012 |
|
RUAN S N, CHEN J F, GU J, et al. A solution to the traveling salesman problem based on neighborhood search mechanism[J]. Microprocessors, 2015, 36 (6): 44- 46.
doi: 10.3969/j.issn.1002-2279.2015.06.012 |
|
| 26 |
XIE J, CARRILLO L R G, JIN L. Path planning for UAV to cover multiple separated convex polygonal regions[J]. IEEE Access, 2020, 8, 51770- 51785.
doi: 10.1109/ACCESS.2020.2980203 |
| 27 |
SHI Y, ZHANG Y Y. The neural network methods for solving traveling salesman problem[J]. Procedia Computer Science, 2022, 199, 681- 686.
doi: 10.1016/j.procs.2022.01.084 |
| 28 | PATRICK S, ROBERT C. Aircraft Inspection by multirotor UAV using coverage path planning[C]// Proc. of the International Conference on Unmanned Aircraft Systems, 2021: 575−581. |
| 29 |
WANG Q, TAN Y, MEI Z Y. Computational methods of acquisition and processing of 3D point cloud data for construction applications[J]. Archives of Computational Methods in Engineering, 2020, 27, 479- 499.
doi: 10.1007/s11831-019-09320-4 |
| 30 |
SHAO Y H, XU X L. Three-dimensional multi-UAV trajectory design for cooperative video inspection and uploading[J]. IEEE Trans. on Vehicular Technology, 2023, 72 (10): 13547- 13558.
doi: 10.1109/TVT.2023.3277482 |
| 31 |
KOTYRBA M, VOLNA E, JARUSEK R, et al. The use of conventional clustering methods combined with SOM to increase the efficiency[J]. Neural Computing and Applications, 2021, 33, 16519- 16531.
doi: 10.1007/s00521-021-06251-9 |
| 32 | JIANG N, LIU T. An improved speech segmentation and clustering algorithm based on SOM and K-means[J]. Mathematical Problems in Engineering, 2020, 2020 (1): 3608286. |
| 33 |
LAI H, HUANG T, LU B, et al. Silhouette coefficient-based weighting k-means algorithm[J]. Neural Computing and Applications, 2025, 37, 3061- 3075.
doi: 10.1007/s00521-024-10706-0 |
| 34 |
LI K, YAN X X, HAN Y, et al. Many-objective optimization based path planning of multiple UAVs in oilfield inspection[J]. Applied Intelligence, 2022, 52, 12668- 12683.
doi: 10.1007/s10489-021-02977-0 |
| 35 |
高庆吉, 谈政, 管若乔. 基于DEPSO算法的多无人机绕检机队规模优化方法[J]. 计算机应用与软件, 2022, 39 (4): 39- 45.
doi: 10.3969/j.issn.1000-386x.2022.04.007 |
|
GAO Q J, TAN Z, GUAN R Q. Optimization of multi-UAV inspection fleet size based on DEPSO algorithm[J]. Computer Applications and Software, 2022, 39 (4): 39- 45.
doi: 10.3969/j.issn.1000-386x.2022.04.007 |
|
| 36 | ZOLFI K. Gold rush optimizer: a new population-based metaheuristic algorithm[J]. Operations Research and Decisions, 2023, 33 (1): 113- 150. |
| 37 |
WANG J Q. Intelligent path planning of mobile robot based on genetic algorithm[J]. Journal of Physics: Conference Series, 2023, 2547 (1): 012001- 012009.
doi: 10.1088/1742-6596/2547/1/012001 |
| 38 | BAI Z Z, ZHOU H Y, WEI J H, et al. An exploration-enhanced hybrid algorithm based on regularity evolution for multi-objective multi-UAV 3-D path planning[J]. Complex & Intelligent Systems, 2025, 11 (5): 225- 245. |
| 39 |
FU Y W, YANG S, LIU B, et al. Multi-UAV cooperative trajectory planning based on the modified cheetah optimization algorithm[J]. Entropy, 2023, 25 (9): 1277- 1300.
doi: 10.3390/e25091277 |
| 40 |
LIU X X, SU Y Z, WU Y, et al. Multi-conflict-based optimal algorithm for multi-UAV cooperative path planning[J]. Drones, 2023, 7 (3): 217- 241.
doi: 10.3390/drones7030217 |
| 41 | 吴军, 石改琴, 卢帅员, 等. 采用无人机视觉的飞机蒙皮损伤智能检测方法[J]. 中国测试, 2021, 47 (11): 119- 126. |
| WU J, SHI G Q, LU S Y, et al. Intelligent detection method for aircraft skin damage using UAV vision[J]. China Testing, 2021, 47 (11): 119- 126. | |
| 42 |
ZHANG J, DU X, DONG Q C, et al. Distributed collaborative complete coverage path planning based on hybrid strategy[J]. Journal of Systems Engineering and Electronics, 2024, 35 (2): 463- 472.
doi: 10.23919/JSEE.2023.000118 |
| 43 | 来磊, 邹鲲, 吴德伟, 等. 交互策略改进MOFA进化的多UAV协同航迹规划[J]. 系统工程与电子技术, 2021, 43 (8): 2282- 2289. |
| LAI L, ZOU K, WU D W, et al. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy[J]. Systems Engineering and Electronics, 2021, 43 (8): 2282- 2289. |
| [1] | 杨鹏程, 杨清清, 高盈盈, 杨志伟, 杨克巍, 艾波. 基于强化学习的海上移动目标搜索路径规划[J]. 系统工程与电子技术, 2026, 48(2): 515-523. |
| [2] | 田维野, 陈于涛, 谢勇, 贺聪炜. 面向多层复杂结构的立体A*路径规划算法研究[J]. 系统工程与电子技术, 2026, 48(2): 535-544. |
| [3] | 魏建林, 林彦超, 唐慧龙, 张旺, 王伟. 基于改进MCTS的多无人机多任务联合决策[J]. 系统工程与电子技术, 2026, 48(2): 556-568. |
| [4] | 晏彪, 吴晓莉, 张蓝, 刘潇, 方泽茜, 韩炜毅, 李琦桉. 有人/无人机协同指挥员的事件相关电位特征[J]. 系统工程与电子技术, 2026, 48(2): 578-587. |
| [5] | 张森, 庞岩, 周福亮. 基于改进Informed-RRT*算法的无人机三维路径规划[J]. 系统工程与电子技术, 2026, 48(2): 660-668. |
| [6] | 乔毅涛, 李爽. 空地异构无人系统固定时间事件触发编队包含控制[J]. 系统工程与电子技术, 2026, 48(2): 669-683. |
| [7] | 杨许鑫, 季薇. 无人机辅助的安全MEC系统中的能耗优化策略[J]. 系统工程与电子技术, 2026, 48(2): 719-726. |
| [8] | 林志康, 刘甲磊, 马佳智, 施龙飞, 徐进宝. 利用分布式辐射源闪烁诱偏的抗反辐射方法[J]. 系统工程与电子技术, 2026, 48(1): 1-11. |
| [9] | 陆则宇, 王瑶, 吴蔚楠, 孙亦鸣, 龚春林. 三维动态环境下的无人机集群双层航迹规划[J]. 系统工程与电子技术, 2026, 48(1): 132-143. |
| [10] | 洪芳宇, 叶青, 张利宁, 伍国华. 面向区域搜索的车载多无人机协同任务规划方法[J]. 系统工程与电子技术, 2026, 48(1): 144-156. |
| [11] | 徐奇琛, 张朝辉, 李靖. 面向未知拒止环境的分布式自适应多无人机协同航迹规划[J]. 系统工程与电子技术, 2026, 48(1): 172-184. |
| [12] | 李正杰, 刘光远, 张浩为, 刘斌, 齐铖. 面向射频隐身的多无人机协同区域覆盖航迹优化方法[J]. 系统工程与电子技术, 2026, 48(1): 301-311. |
| [13] | 闻雯, 时晨光, 周建江. 多元威胁环境下无人机集群隐身航迹规划算法[J]. 系统工程与电子技术, 2025, 47(9): 2971-2984. |
| [14] | 魏潇龙, 吴亚荣, 姚登凯, 赵顾颢. 基于深度强化学习的无人机空战机动分层决策算法[J]. 系统工程与电子技术, 2025, 47(9): 2993-3003. |
| [15] | 张国庆, 徐轶晖, 李纪强, 张显库, 邱斌. 基于异步搜寻制导的机/船协同事件触发控制[J]. 系统工程与电子技术, 2025, 47(9): 3058-3065. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||