
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (2): 535-544.doi: 10.12305/j.issn.1001-506X.2026.02.15
• 系统工程 • 上一篇
田维野1( ), 陈于涛2,*, 谢勇1, 贺聪炜1
), 陈于涛2,*, 谢勇1, 贺聪炜1
收稿日期:2024-11-13
修回日期:2025-03-31
出版日期:2025-06-11
发布日期:2025-06-11
通讯作者:
陈于涛
E-mail:15338601299@163.com
作者简介:田维野(2000—),男,硕士研究生,主要研究方向为路径规划基金资助:
Weiye TIAN1(), Yutao CHEN2,*, Yong XIE1, Congwei HE1
Received:2024-11-13
Revised:2025-03-31
Online:2025-06-11
Published:2025-06-11
Contact:
Yutao CHEN
E-mail:15338601299@163.com
摘要:
针对复杂多层结构及局部不连通问题,提出面向多层复杂结构的立体A*路径规划算法。首先,将多层复杂结构转换为无向赋权图,并且以最小化路径的总权值为目标,建立了多层复杂结构路径规划的数学模型;随后,考虑不同层级之间的连接及层内局部不连通性,分别设计多层单向导航启发式策略和跨层双向绕行启发式策略,并基于两种启发式策略,提出一种新型的立体A*路径规划算法。最后,与传统A*算法、双向A*算法和Dijkstra算法进行了对比实验。实验结果表明,本文提出的算法能有效处理复杂多层结构路径规划及局部不连通问题,在收敛速度和解的质量方面更具优越性。
中图分类号:
田维野, 陈于涛, 谢勇, 贺聪炜. 面向多层复杂结构的立体A*路径规划算法研究[J]. 系统工程与电子技术, 2026, 48(2): 535-544.
Weiye TIAN, Yutao CHEN, Yong XIE, Congwei HE. Research on three-dimensional A* path planning algorithm for multi-floor complex structures[J]. Systems Engineering and Electronics, 2026, 48(2): 535-544.
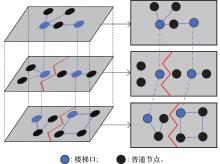
图1
多层局部不连通结构及其转换示意图"
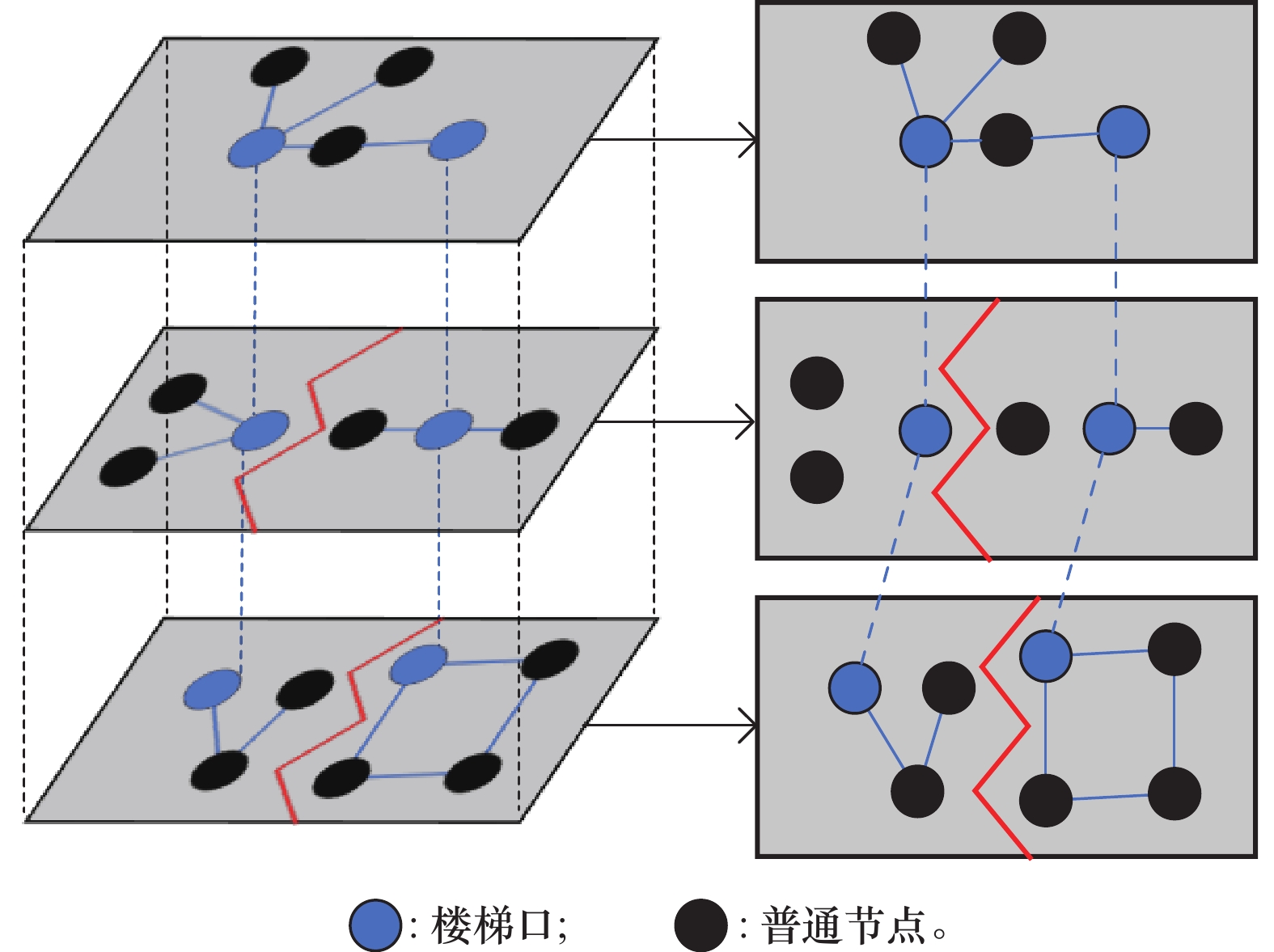
图2
TDA*算法总体流程"

图3
局部不连通情况示意图"
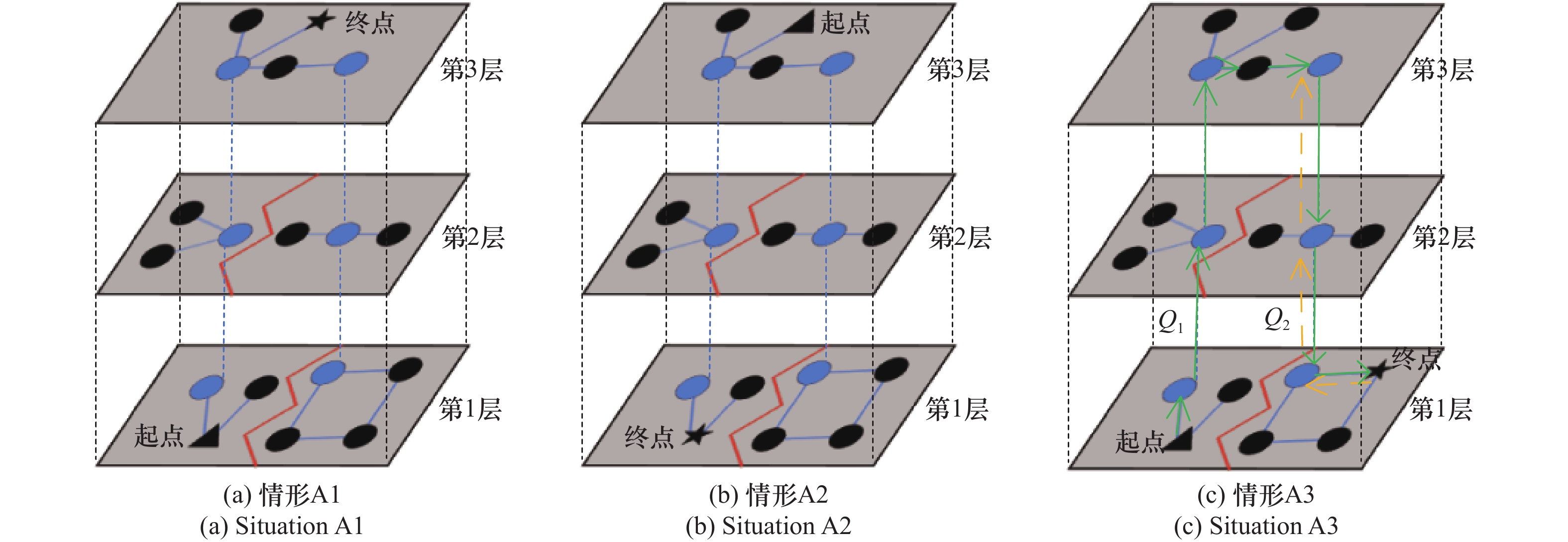

图4
局部不连通的情形及处理"
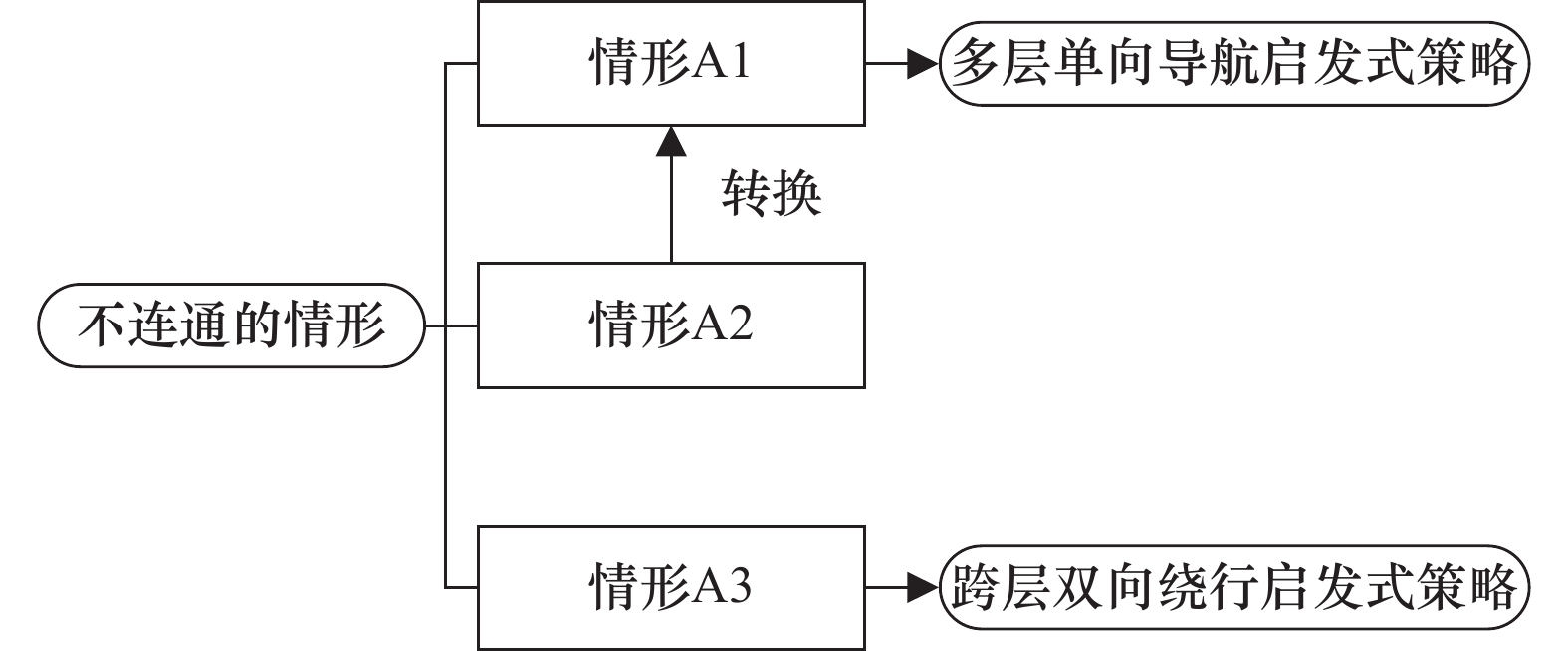
图5
算例无向赋权图示"
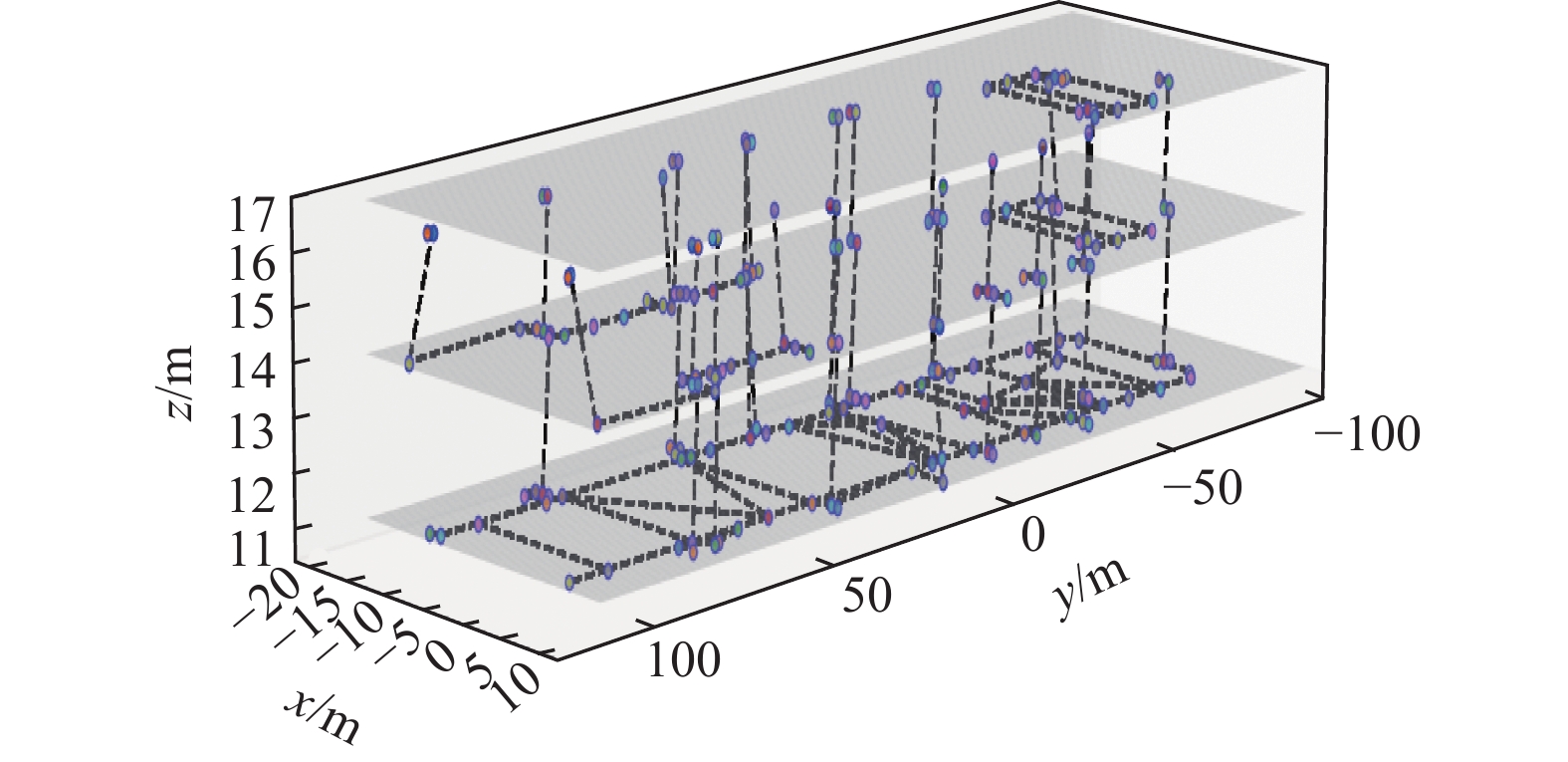
表1
实验参数"
| 模型 | 节点数 | 楼层数 | 楼梯数 | 算例 | 起点楼层 | 终点楼层 |
| 小规模 | 97 | 2 | 14 | A | 1(连通层) | 1(连通层) |
| B | 1(连通层) | 2(不连通层) | ||||
| C | 2(不连通层) | 2(不连通层) | ||||
| 中规模 | 191 | 3 | 37 | D | 1(连通层) | 1(连通层) |
| E | 1(连通层) | 3(不连通层) | ||||
| F | 3(不连通层) | 3(不连通层) | ||||
| 大规模 | 547 | 9 | 87 | G | 1(连通层) | 1(连通层) |
| H | 1(连通层) | 9(不连通层) | ||||
| I | 9(不连通层) | 9(不连通层) |
表2
TDA*、TA*、BA*和D算法的实验结果对比"
| 节点规模 | 算例 | 求解路径长度/m | 平均计算时间/ms | 改进率/% | ||||||||||
| 小 | A | 174 | 174 | 174 | 174 | 11.4 | 14 | 13.6 | 41 | 18.6 | 16.2 | 72.2 | ||
| B | 197.03 | 197.03 | 197.03 | 197.03 | 14.6 | 24.9 | 15.4 | 51.6 | 41.4 | 5.2 | 71.7 | |||
| C | 173.23 | 173.23 | 173.23 | 173.23 | 16.4 | 30.1 | 21.7 | 50.8 | 45.5 | 24.4 | 67.7 | |||
| 中 | D | 196 | 196 | 196 | 196 | 13.1 | 28.2 | 44.3 | 172.4 | 53.5 | 70.4 | 92.4 | ||
| E | 211.16 | 211.16 | 211.16 | 211.16 | 20.7 | 63.1 | 31.1 | 174.2 | 67.2 | 33.4 | 88.1 | |||
| F | 256.91 | 237.17 | 237.17 | 237.17 | 25.4 | 64.6 | 30.6 | 183.5 | 60.7 | 17.0 | 86.2 | |||
| 大 | G | 68 | 68 | 68 | 68 | 10.3 | 18.1 | 13.8 | 43.1 | 25.4 | 99.3 | |||
| H | 105.49 | 105.49 | 105.49 | 105.49 | 65 | 86.5 | 72 | 24.9 | 9.7 | 95.4 | ||||
| I | 108.21 | 108.21 | 108.21 | 108.21 | 38.8 | 82.7 | 63.4 | 53.1 | 38.8 | 97.4 | ||||
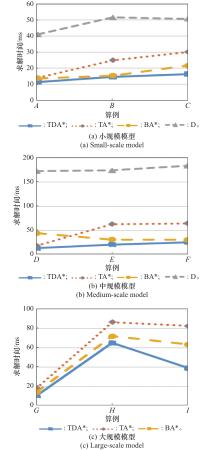
图6
算法运算时间对比"
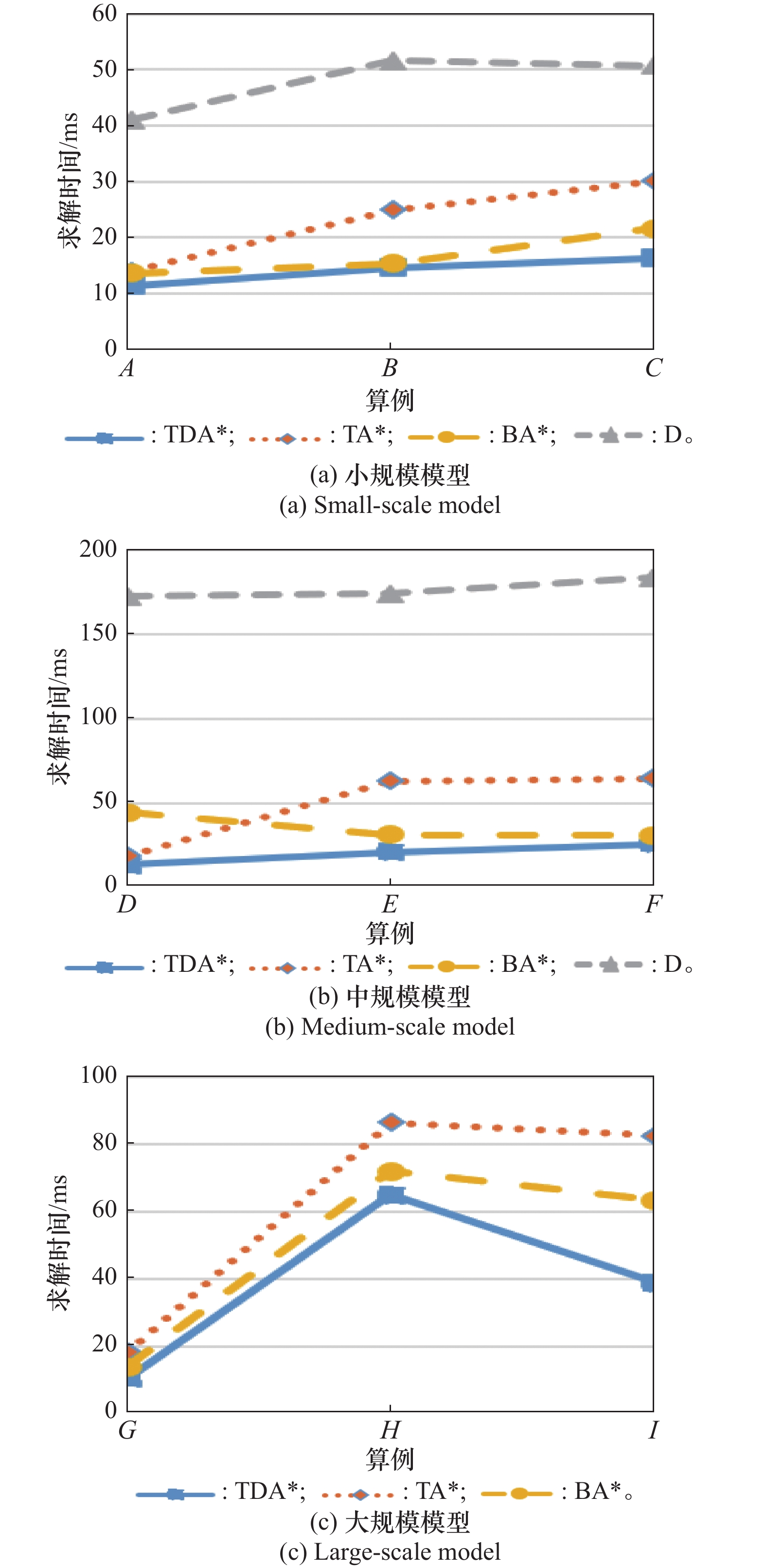
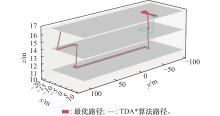
图7
TDA*算法路径和最优路径可视化对比"
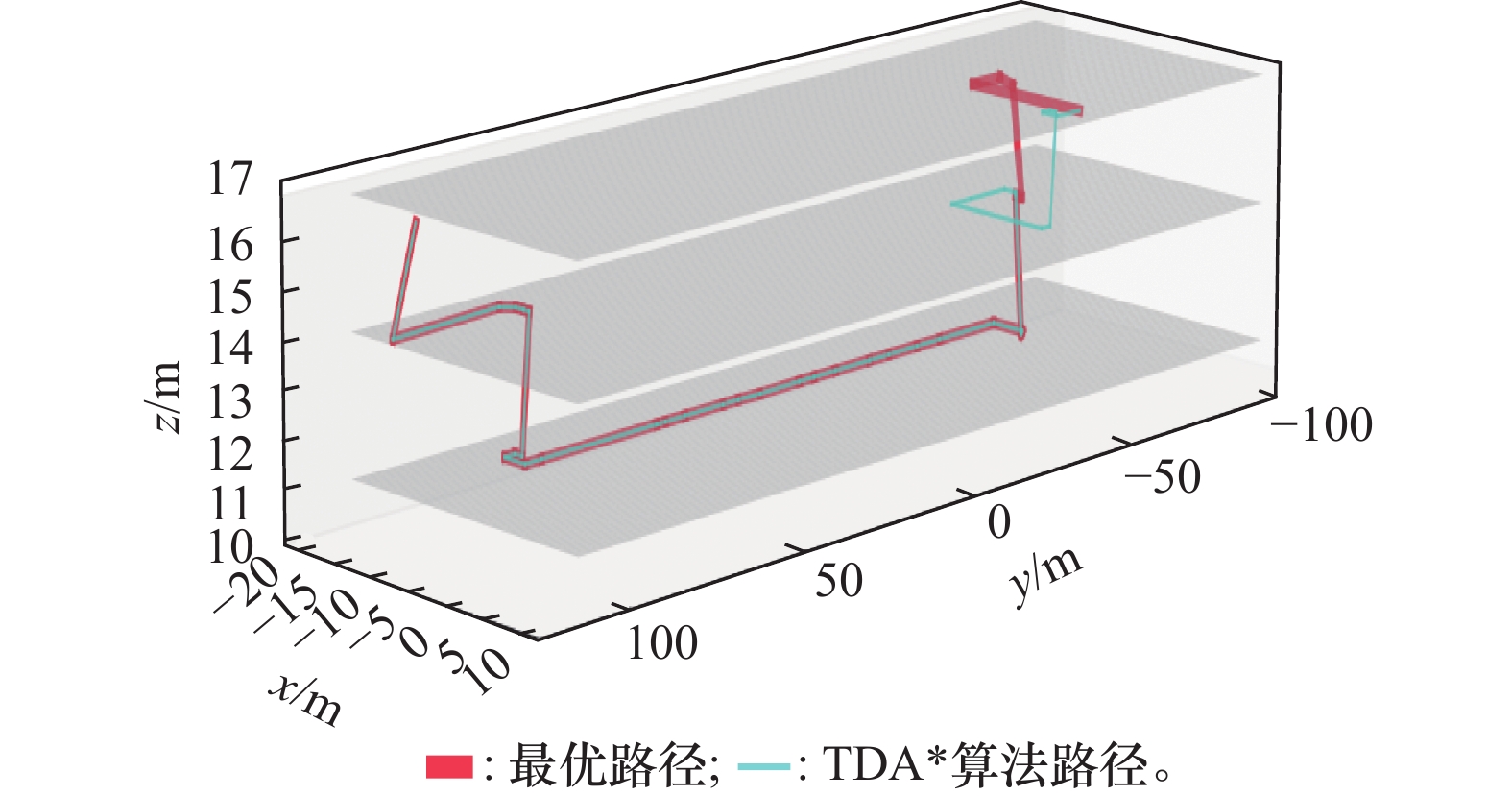
表3
中规模模型下算法实时性测试结果"
| 算法 | 平均路径长度/m | 成功率/% | ||
| TDA* | 80.46 | 53.3 | 93.3 | |
| TA* | 80.20 | 33.3 | 73.3 | |
| BA* | 80.20 | 40 | 66.7 | |
表4
大规模模型下算法实时性测试结果"
| 算法 | 平均路径长度/m | 成功率/% | ||
| TDA* | 89.21 | 60 | 93.3 | |
| TA* | 82.03 | 40 | 53.3 | |
| BA* | 82.03 | 53.3 | 60 | |
表5
IA*和TA*算法的实验结果"
| 节点规模 | 算例 | 平均求解时间/ms | 改进率/% | ||
| 小 | A | 9.1 | 12.6 | 27.8 | |
| 中 | D | 12.9 | 26.1 | 50.6 | |
| 大 | G | 12.2 | 22.3 | 45.3 | |
表6
HA*和TA*算法的实验结果"
| 节点规模 | 算例 | 求解路径长度/m | 平均计算时间/ms | 改进率/% | ||||
| 小 | A | 174 | 174 | 12.1 | 13.8 | 12.3 | ||
| B | 197.03 | 197.03 | 19.9 | 24.3 | 18.1 | |||
| C | 173.23 | 173.23 | 24.3 | 30.9 | 21.4 | |||
| 中 | D | 196 | 196 | 20.1 | 28.9 | 30.4 | ||
| E | 211.16 | 211.16 | 33.4 | 60.9 | 45.2 | |||
| F | 256.91 | 237.17 | 36.5 | 62.5 | 41.6 | |||
| 大 | G | 196 | 196 | 22.9 | 23.3 | 1.7 | ||
| H | 105.49 | 105.49 | 69.6 | 86.3 | 19.4 | |||
| I | 108.21 | 108.21 | 40.8 | 79.3 | 48.5 | |||
| 1 | HAMIEH A, DENEUX D, TAHON C. BiMov: BIM-based indoor path planning[C]// Proc. of the International Joint Conference on Mechanics, Design Engineering & Advanced Manufacturing, 2017: 889−899. |
| 2 |
TANG G, TANG C, CLARAMUNT C, et al. Geometric A-star algorithm: an improved a-star algorithm for AGV path planning in a port environment[J]. IEEE Access, 2021, 9, 59196- 59210.
doi: 10.1109/ACCESS.2021.3070054 |
| 3 |
XU S H, GU Y, LI X Y, et al. Indoor emergency path planning based on the Q-learning optimization algorithm[J]. ISPRS International Journal of Geo-Information, 2022, 11 (1): 66.
doi: 10.3390/ijgi11010066 |
| 4 |
LIU Z H, ZOU R H. Dynamic evacuation path planning for subway station fire based on IACO[J]. Journal of Building Engineering, 2024, 86, 108828.
doi: 10.1016/j.jobe.2024.108828 |
| 5 | PENG W D, ZHANG Y F, GUO W. Research on indoor UAV 3D path planning based on optimal ant colony-artificial potential field method[C]// Proc. of the International Conference on Mechanical Design, 2023: 795−813. |
| 6 | ZHANG M L, HAO P. 2D and 3D path planning for mobile robots based on improved SSA algorithm[J]. International Journal of Intelligent Robotics and Applications, 2024, 9, 176- 188. |
| 7 |
LIU L X, WANG X, YANG X, et al. Path planning techniques for mobile robots: review and prospect[J]. Expert Systems with Applications, 2023, 227, 120254.
doi: 10.1016/j.eswa.2023.120254 |
| 8 |
ALEKSANDROV M, CHENG C, RAJABIFARD A, et al. Modelling and finding optimal evacuation strategy for tall buildings[J]. Safety Science, 2019, 115, 247- 255.
doi: 10.1016/j.ssci.2019.02.017 |
| 9 |
GHASEMI P, KHALILI-DAMGHANI K, HAFEZALKOTOB A, et al. Uncertain multi-objective multi-commodity multi-period multi-vehicle location-allocation model for earthquake evacuation planning[J]. Applied Mathematics and Computation, 2019, 350, 105- 132.
doi: 10.1016/j.amc.2018.12.061 |
| 10 |
LI Y J, WEI W, GAO Y, et al. PQ-RRT*: an improved path planning algorithm for mobile robots[J]. Expert Systems with Applications, 2020, 152, 113425.
doi: 10.1016/j.eswa.2020.113425 |
| 11 |
YANG X X, ZHANG R, LI Y X, et al. Passenger evacuation path planning in subway station under multiple fires based on multiobjective robust optimization[J]. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (11): 21915- 21931.
doi: 10.1109/TITS.2022.3190291 |
| 12 |
SRINIKETH K, LE A V, MOHAN R E, et al. Robot-aided human evacuation optimal path planning for fire drill in buildings[J]. Journal of Building Engineering, 2023, 72, 106512.
doi: 10.1016/j.jobe.2023.106512 |
| 13 |
LIU L F, ZHANG H J, XIE J P, et al. Dynamic evacuation planning on cruise ships based on an improved ant colony system (IACS)[J]. Journal of Marine Science and Engineering, 2021, 9 (2): 220.
doi: 10.3390/jmse9020220 |
| 14 |
PENG Y, LI S W, HU Z Z. A self-learning dynamic path planning method for evacuation in large public buildings based on neural networks[J]. Neurocomputing, 2019, 365, 71- 85.
doi: 10.1016/j.neucom.2019.06.099 |
| 15 |
LEE J, PARK H, KIM Y, et al. Multi-level indoor path planning and clearance-based path optimization for search and rescue operations[J]. IEEE Access, 2023, 11, 40930- 40943.
doi: 10.1109/ACCESS.2023.3269981 |
| 16 |
PALACÍN J, RUBIES E, BITRIÁ R, et al. Path planning of a mobile delivery robot operating in a multi-story building based on a predefined navigation tree[J]. Sensors, 2023, 23 (21): 8795.
doi: 10.3390/s23218795 |
| 17 |
MIRAHADI F, MCCABE B Y. EvacuSafe: a real-time model for building evacuation based on Dijkstra’s algorithm[J]. Journal of Building Engineering, 2021, 34, 101687.
doi: 10.1016/j.jobe.2020.101687 |
| 18 |
GUAN W L, HOU S, YU G J, et al. Dynamic evacuation path planning for multi-exit building fire: bi-objective model and algorithm[J]. Fire Technology, 2023, 59 (5): 2853- 2876.
doi: 10.1007/s10694-023-01448-x |
| 19 |
DOU Z, HU Y H, MEBARKI A, et al. Pre-evacuation path planning in chemicals-concentrated areas with risk assessment and individual character analysis[J]. Journal of Loss Prevention in the Process Industries, 2023, 83, 105076.
doi: 10.1016/j.jlp.2023.105076 |
| 20 |
REN Y S, ZHANG G M, ZHENG J X, et al. An integrated solution for nuclear power plant on-site optimal evacuation path planning based on atmospheric dispersion and dose model[J]. Sustainability, 2024, 16 (6): 2458.
doi: 10.3390/su16062458 |
| 21 |
张新艳, 邹亚圣. 基于改进A*算法的自动导引车无碰撞路径规划[J]. 系统工程理论与实践, 2021, 41 (1): 240- 246.
doi: 10.12011/SETP2019-1470 |
|
ZHANG X Y, ZOU Y S. Collision-free path planning for automated guided vehicles based on improved A* algorithm[J]. Systems Engineering-Theory & Practice, 2021, 41 (1): 240- 246.
doi: 10.12011/SETP2019-1470 |
|
| 22 |
张浩杰, 张玉东, 梁荣敏, 等. 改进A*算法的机器人能耗最优路径规划方法[J]. 系统工程与电子技术, 2023, 45 (2): 513- 520.
doi: 10.12305/j.issn.1001-506X.2023.02.23 |
|
ZHANG H J, ZHANG Y D, LIANG R M, et al. Energy-efficient path planning method for robots based on improved A* algorithm[J]. Systems Engineering and Electronics, 2023, 45 (2): 513- 520.
doi: 10.12305/j.issn.1001-506X.2023.02.23 |
|
| 23 |
李文刚, 汪流江, 方德翔, 等. 联合A*与动态窗口法的路径规划算法[J]. 系统工程与电子技术, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
LI W G, WANG L J, FANG D X, et al. Path planning algorithm combining A* with DWA[J]. Systems Engineering and Electronics, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
| 24 |
FU B, CHEN L, ZHOU Y T, et al. An improved A* algorithm for the industrial robot path planning with high success rate and short length[J]. Robotics and Autonomous Systems, 2018, 106, 26- 37.
doi: 10.1016/j.robot.2018.04.007 |
| 25 | BAO J S, ZHANG M Y, GE S R, et al. Underground driverless path planning of trackless rubber tyred vehicle based on improved A* and artificial potential field algorithm[J]. Journal of China Coal Society, 2022, 47 (3): 1347- 1360. |
| 26 |
WANG P Y, LIU Y L, YAO W M, et al. Improved A-star algorithm based on multivariate fusion heuristic function for autonomous driving path planning[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237 (7): 1527- 1542.
doi: 10.1177/09544070221100677 |
| 27 |
TIAN H, YANG Z H, SUN G M, et al. An improved A* path-planning algorithm for nuclear spill evacuation and radioactive source retrieval in complex terrain[J]. Nuclear Engineering and Design, 2023, 408, 112314.
doi: 10.1016/j.nucengdes.2023.112314 |
| 28 | HAN C Y, LI B Y. Mobile robot path planning based on improved A* algorithm[C]// Proc. of the IEEE 11th Joint International Information Technology and Artificial Intelligence Conference, 2023, 11: 672−676. |
| 29 | 李仲明. 室内多层环境三维导航方法研究[D]. 天津: 中国民航大学, 2020. |
| LI Z M. Research on three-dimensional navigation method for indoor multi-layer environment[D]. Tianjin: Civil Aviation University of China, 2020. | |
| 30 |
刘武平, 熊维茜. 一种基于多层导航网格的室内路径规划算法[J]. 测绘地理信息, 2020, 45 (6): 18- 21.
doi: 10.14188/j.2095-6045.2018349 |
|
LIU W P, XIONG W Q. An indoor path planning algorithm based on multi-layer navigation grid[J]. Journal of Geomatics, 2020, 45 (6): 18- 21.
doi: 10.14188/j.2095-6045.2018349 |
|
| 31 |
ZHENG W, HUANG K P, WANG C Y, et al. Research on 3D path planning of quadrotor based on improved A* algorithm[J]. Processes, 2023, 11 (2): 334.
doi: 10.3390/pr11020334 |
| 32 |
MEYSAMI A, KELOUWANI S, CUILLIERE J C, et al. An efficient indoor large map global path planning for robot navigation[J]. Expert Systems with Applications, 2024, 248, 123388.
doi: 10.1016/j.eswa.2024.123388 |
| 33 |
WANG H W, LOU S J, JING J, et al. The EBS-A* algorithm: an improved A* algorithm for path planning[J]. PloS One, 2022, 17 (2): e0263841.
doi: 10.1371/journal.pone.0263841 |
| 34 |
WANG P, MUTAHIRA H, KIM J, et al. ABA*–adaptive bidirectional A* algorithm for aerial robot path planning[J]. IEEE Access, 2023, 11, 103521- 103529.
doi: 10.1109/ACCESS.2023.3317918 |
| 35 | CHEN H B, TAO J Y, ZHOU B Z, et al. Research on an autonomous uav search and rescue system based on the improved EGO-planner algorithm[C]// Proc. of the 5th International Conference on Computer Engineering and Application, 2024: 1170−1175. |
| 36 |
ZHANG H C, LI G. Precise indoor path planning based on hybrid model of GeoSOT and BIM[J]. ISPRS International Journal of Geo-Information, 2022, 11 (4): 243.
doi: 10.3390/ijgi11040243 |
| 37 | SONG P H, LI Y, JIA J Y. Fast path planning algorithm for 3D indoor scene roaming based on path table[C]// Proc. of the International Conference on Intelligent Computing, 2024: 118−129. |
| 38 | 杨栋. 大型公共建筑火灾应急疏散路径优化及仿真研究[D]. 沈阳: 沈阳建筑大学, 2022. |
| YANG D. Research on optimization and simulation of fire emergency evacuation path in large public buildings[D]. Shenyang: Shenyang Jianzhu University, 2022. | |
| 39 | VERMA D, MESSON D, RASTOGI M, et al. Comparative study of various approaches of Dijkstra algorithm[C]// Proc. of the International Conference on Computing, Communication, and Intelligent Systems, 2021: 328−336. |
| 40 | LI Y, ZHANG H Y, ZHU H Z, et al. IBAS: index based A-star[J]. IEEE Access, 2018, 6, 11707- 11715. |
| [1] | 杨鹏程, 杨清清, 高盈盈, 杨志伟, 杨克巍, 艾波. 基于强化学习的海上移动目标搜索路径规划[J]. 系统工程与电子技术, 2026, 48(2): 515-523. |
| [2] | 闻雯, 时晨光, 周建江. 多元威胁环境下无人机集群隐身航迹规划算法[J]. 系统工程与电子技术, 2025, 47(9): 2971-2984. |
| [3] | 羊钊, 胡锦标, 王艳, 齐洪彪. 考虑异巢起降的无人机山地巡检覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(8): 2622-2631. |
| [4] | 焉晓贞, 周新悦, 罗清华. 改进A-star算法的无人船动态路径规划[J]. 系统工程与电子技术, 2025, 47(7): 2314-2328. |
| [5] | 唐俊超, 胡春鹤. 三维地形风场环境下无人机全覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(7): 2349-2356. |
| [6] | 刘伊婕, 姜斌, 马亚杰, 李文博, 刘成瑞. 无人艇编队避碰路径规划与重规划[J]. 系统工程与电子技术, 2025, 47(6): 1964-1974. |
| [7] | 陈威, 王从庆, 曾强, 李战. 面向飞机表面视觉检查的无人机覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1206-1213. |
| [8] | 耿泽, 黄炎焱, 张寒. 基于火炮转移路径预测的无人机集群反炮兵搜索路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1222-1234. |
| [9] | 刁小龙, 范厚明, 李阳, 卞子木, 魏硕, 张冰浩. 封闭与开放场景下两级无人车协同配送路径优化[J]. 系统工程与电子技术, 2025, 47(12): 3952-3965. |
| [10] | 余文瞾, 乔靖超, 杜哲, 邢著楷, 万芯源. 基于聚类优化算法的多无人艇协同任务规划[J]. 系统工程与电子技术, 2025, 47(11): 3708-3720. |
| [11] | 夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46(9): 3070-3081. |
| [12] | 费博雯, 包卫东, 刘大千, 朱晓敏. 面向动态目标搜索与打击的空地协同自主任务分配方法[J]. 系统工程与电子技术, 2024, 46(7): 2346-2358. |
| [13] | 李杰, 谭跃进. 基于集成改进蚁群算法的作战环推荐方法[J]. 系统工程与电子技术, 2024, 46(6): 2002-2012. |
| [14] | 孙家玮, 余明晖, 杨大鹏, 汤皓泉, 卞大鹏. 基于CL-RRT与MPC的舰载机牵引系统路径规划[J]. 系统工程与电子技术, 2024, 46(5): 1745-1755. |
| [15] | 隋东, 杨振宇, 丁松滨, 周婷婷. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5): 1756-1766. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||