
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (10): 3168-3178.doi: 10.12305/j.issn.1001-506X.2025.10.05
• 电子技术 • 上一篇
邵凯1,2,3,*( ), 吴广1, 梁燕1, 奚兴发1, 高琳珈1
), 吴广1, 梁燕1, 奚兴发1, 高琳珈1
收稿日期:2024-10-15
出版日期:2025-10-25
发布日期:2025-10-23
通讯作者:
邵凯
E-mail:shaokai@cqupt.edu.cn
作者简介:吴 广(2000—),男,硕士研究生,主要研究方向为深度学习、3D目标检测
Kai SHAO1,2,3,*(), Guang WU1, Yan LIANG1, Xingfa XI1, Linjia GAO1
Received:2024-10-15
Online:2025-10-25
Published:2025-10-23
Contact:
Kai SHAO
E-mail:shaokai@cqupt.edu.cn
摘要:
针对自动驾驶三维目标检测中多层次特征提取和多尺度特征上下文依赖性问题,采用点?体素的检测框架,提出一种综合多项技术的基于局部特征编解码区域卷积神经网络(local feature encode-decode region-based convolutional neural network,LFED-RCNN)。首先,在三维特征提取阶段提出结合卷积网络和Transformer编解码结构的卷积编解码主干,其中额外下采样卷积网络提取多层次三维特征,局部编解码网络建模特征间关联并融合深浅层特征,提升模型在复杂背景下对前景目标的特征获取能力。其次,设计位置编码模块对鸟瞰图视角下的二维特征进行位置编码,建立长期依赖关系,提升检测精度。所提方案LFED-RCNN在KITTI和ONCE数据集上进行验证,在KITTI数据集的困难等级下,对车、行人、骑行者三类检测对象分别可达到82.95%、57.48%、72.14%的平均准确率(mean average precision,mAP)。实验结果证明,所提方法在困难模式上表现出优异性能。
中图分类号:
邵凯, 吴广, 梁燕, 奚兴发, 高琳珈. 基于局部特征编解码的自动驾驶3D目标检测[J]. 系统工程与电子技术, 2025, 47(10): 3168-3178.
Kai SHAO, Guang WU, Yan LIANG, Xingfa XI, Linjia GAO. Local feature encode-decoding based 3D target detection of autonomous driving[J]. Systems Engineering and Electronics, 2025, 47(10): 3168-3178.

图1
LFED-RCNN网络结构图"
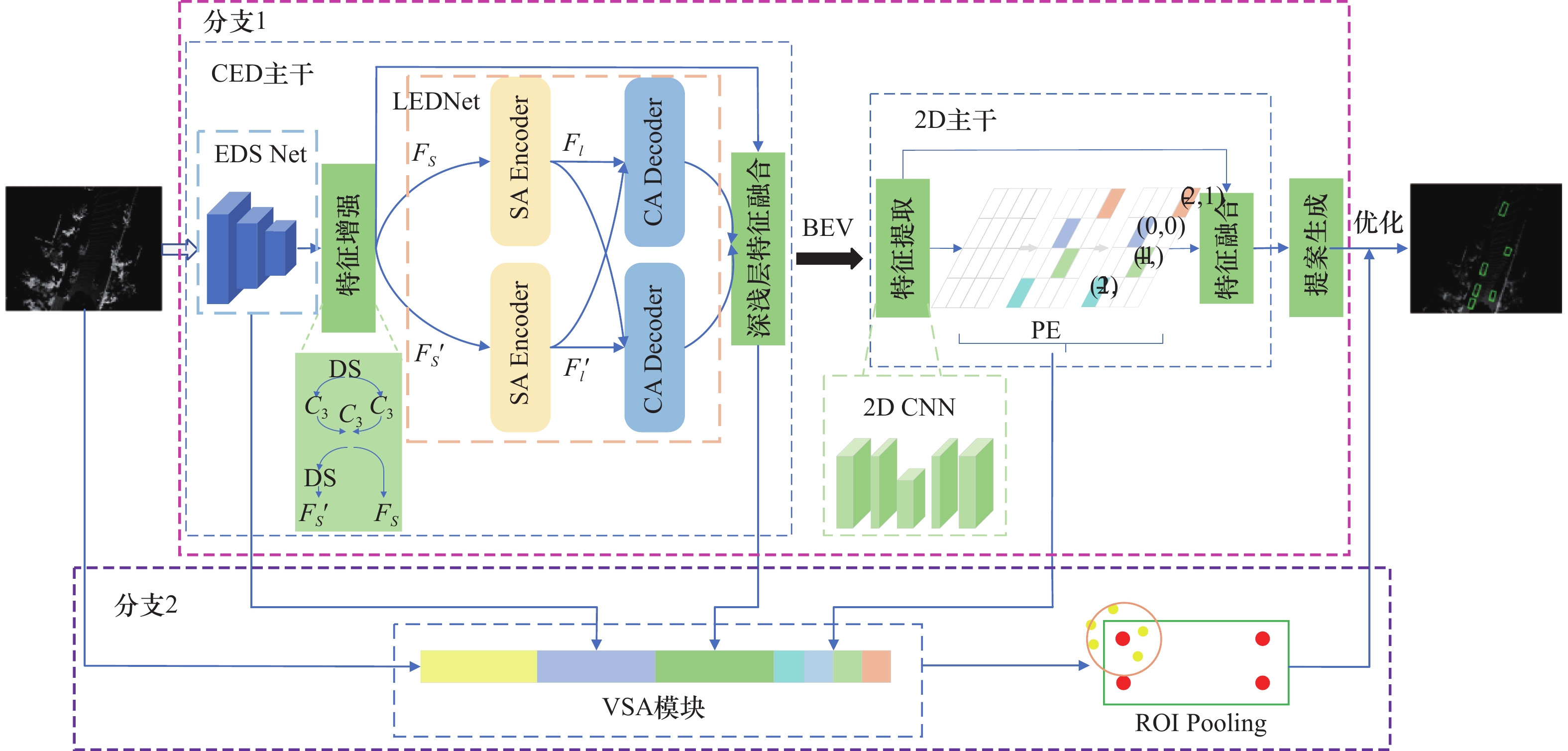
图2
EDSNet结构"
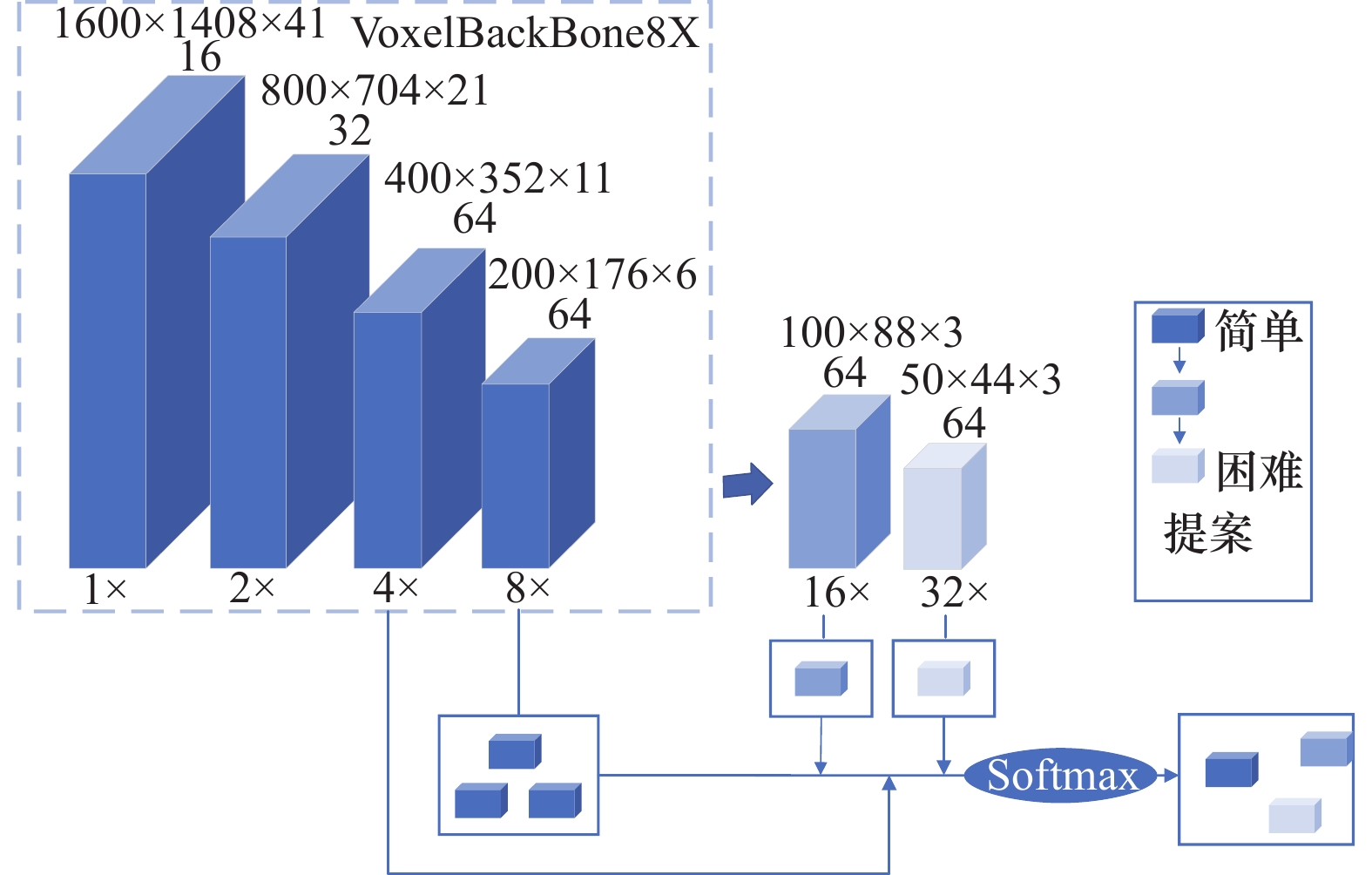
图3
SA Encoder结构"
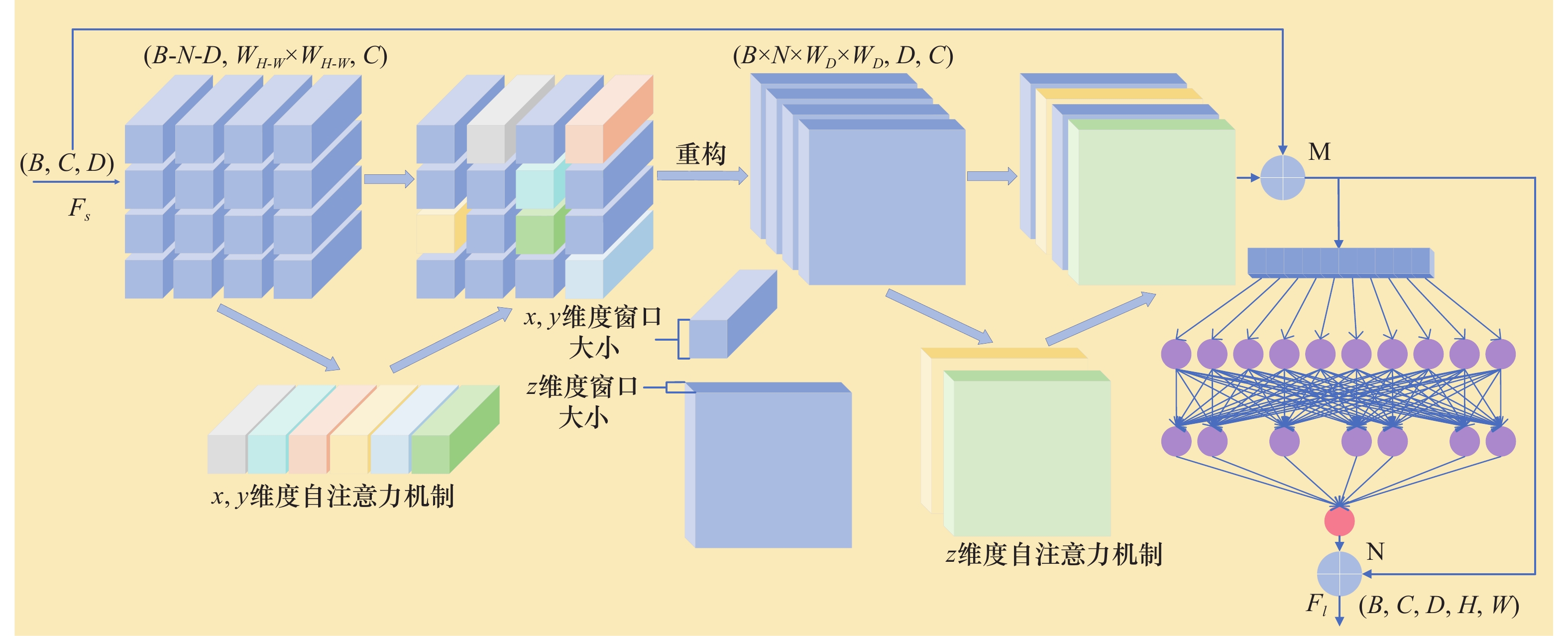
图4
CA Decoder结构"
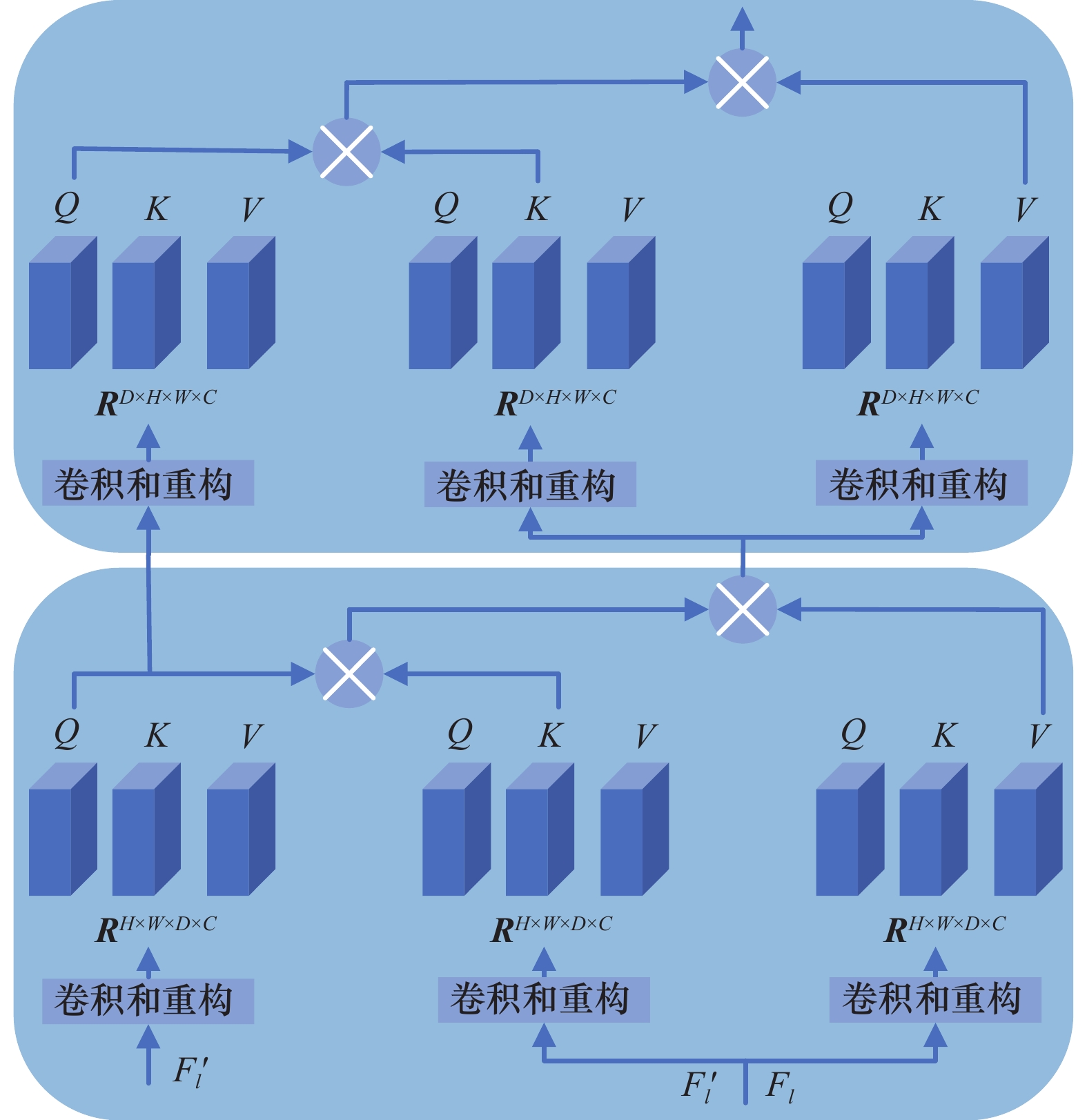
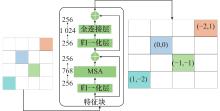
图5
PE模块"
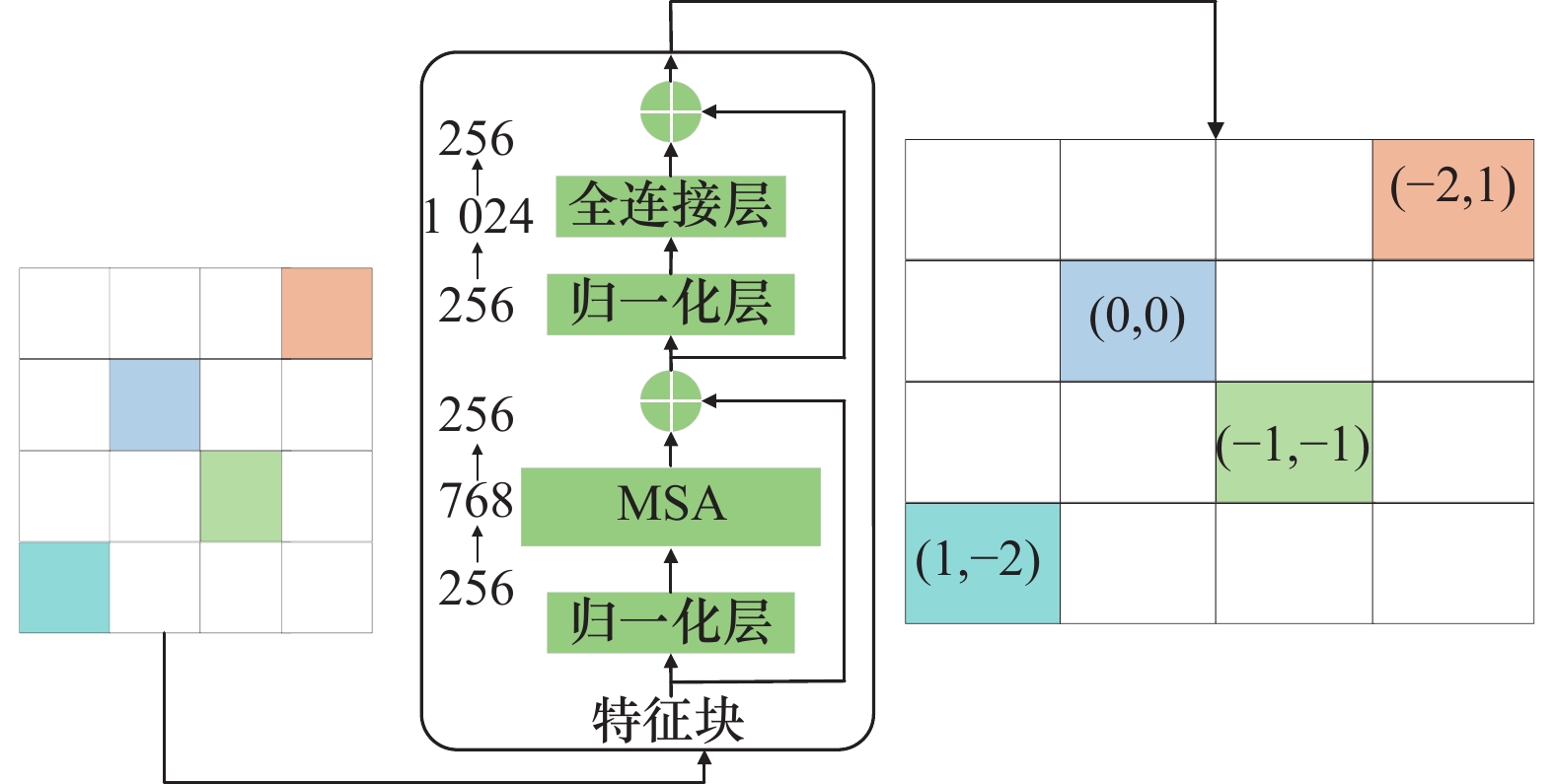
表1
KITTI数据集上各算法对比实验结果"
| 方法 | 阶段 | 车mAP(IoU=0.7) | 行人mAP(IoU=0.5) | 骑行者mAP(IoU=0.5) | ||||||||
| 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | ||||
| MFANet[ | Ⅱ | 91.00 | 82.65 | 81.80 | 64.19 | 57.00 | 51.25 | 93.88 | 74.68 | 70.29 | ||
| SPNet-P[ | Ⅰ | 88.71 | 78.67 | 77.29 | 61.07 | 56.46 | 51.19 | 82.10 | 68.03 | 63.00 | ||
| Voxel-RCNN[ | Ⅱ | 92.38 | 85.29 | 82.86 | — | — | — | — | — | — | ||
| VoTr-SSD[ | Ⅰ | 87.86 | 78.27 | 76.93 | — | — | — | — | — | — | ||
| PointRCNN[ | Ⅰ | 89.43 | 80.50 | 78.15 | — | — | — | — | — | — | ||
| IA-SSD[ | Ⅰ | 89.05 | 79.59 | 77.84 | 60.62 | 54.74 | 50.39 | 84.07 | 68.11 | 65.14 | ||
| CAT-Det[ | Ⅰ | 90.12 | 81.46 | 79.15 | 61.57 | 58.82 | 53.11 | 85.92 | 71.03 | 66.33 | ||
| PFSC[ | Ⅰ | 92.06 | 84.68 | 82.61 | 63.34 | 57.86 | 53.32 | 92.04 | 74.68 | 69.92 | ||
| PV-RCNN[ | Ⅱ | 92.22 | 84.66 | 82.55 | 65.37 | 59.34 | 55.31 | 92.08 | 72.43 | 67.79 | ||
| M3DETR[ | Ⅱ | 89.28 | 84.16 | 79.05 | — | — | — | — | — | — | ||
| PV-RCNN++[ | Ⅱ | 91.06 | 84.07 | 81.64 | 64.50 | 58.48 | 52.60 | 92.61 | 72.71 | 68.04 | ||
| MFT-SSD[ | Ⅱ | 89.35 | 84.46 | 78.55 | — | — | — | — | — | — | ||
| LFED-RCNN | Ⅱ | 92.22 | 85.36 | 82.95 | 70.00 | 62.73 | 57.48 | 93.94 | 73.56 | 72.14 | ||
表2
与部分主流方法在ONCE数据集上的对比"
| 方法 | 车mAP(IoU=0.7) | 行人mAP(IoU=0.5) | 骑行者mAP(IoU=0.5) | |||||||||||
| 整体 | 0~30 m | 30~50 m | 50 m~∞ | 整体 | 0~30 m | 30~50 m | 50 m~∞ | 整体 | 0~30 m | 30~50 m | 50 m~∞ | |||
| PointRCNN[ | 52.09 | 74.75 | 40.89 | 16.81 | 4.28 | 6.17 | 2.40 | 0.91 | 29.84 | 46.03 | 20.94 | 5.46 | ||
| PointPillars[ | 68.57 | 80.86 | 62.07 | 47.04 | 17.63 | 19.74 | 15.15 | 10.23 | 46.81 | 58.33 | 40.32 | 25.86 | ||
| PV-RCNN[ | 77.77 | 89.39 | 72.55 | 58.64 | 23.50 | 25.61 | 22.84 | 17.27 | 59.37 | 71.66 | 52.58 | 36.17 | ||
| SECOND[ | 71.19 | 84.04 | 63.02 | 47.25 | 26.44 | 29.33 | 24.05 | 18.05 | 58.04 | 69.96 | 52.43 | 34.61 | ||
| CenterPoints[ | 66.79 | 80.10 | 59.55 | 43.39 | 49.90 | 56.24 | 42.61 | 26.27 | 63.45 | 74.28 | 57.94 | 41.48 | ||
| PointPainting[ | 66.17 | 80.31 | 59.80 | 42.26 | 44.84 | 52.63 | 36.63 | 22.47 | 62.34 | 73.55 | 57.20 | 40.39 | ||
| LFED-RCNN | 80.23 | 90.00 | 76.53 | 62.58 | 33.49 | 37.82 | 31.20 | 21.43 | 63.58 | 74.74 | 58.91 | 41.70 | ||
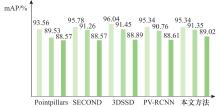
图6
BEV视角下检测性能对比"
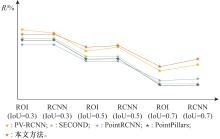
图7
不同条件下的R对比"
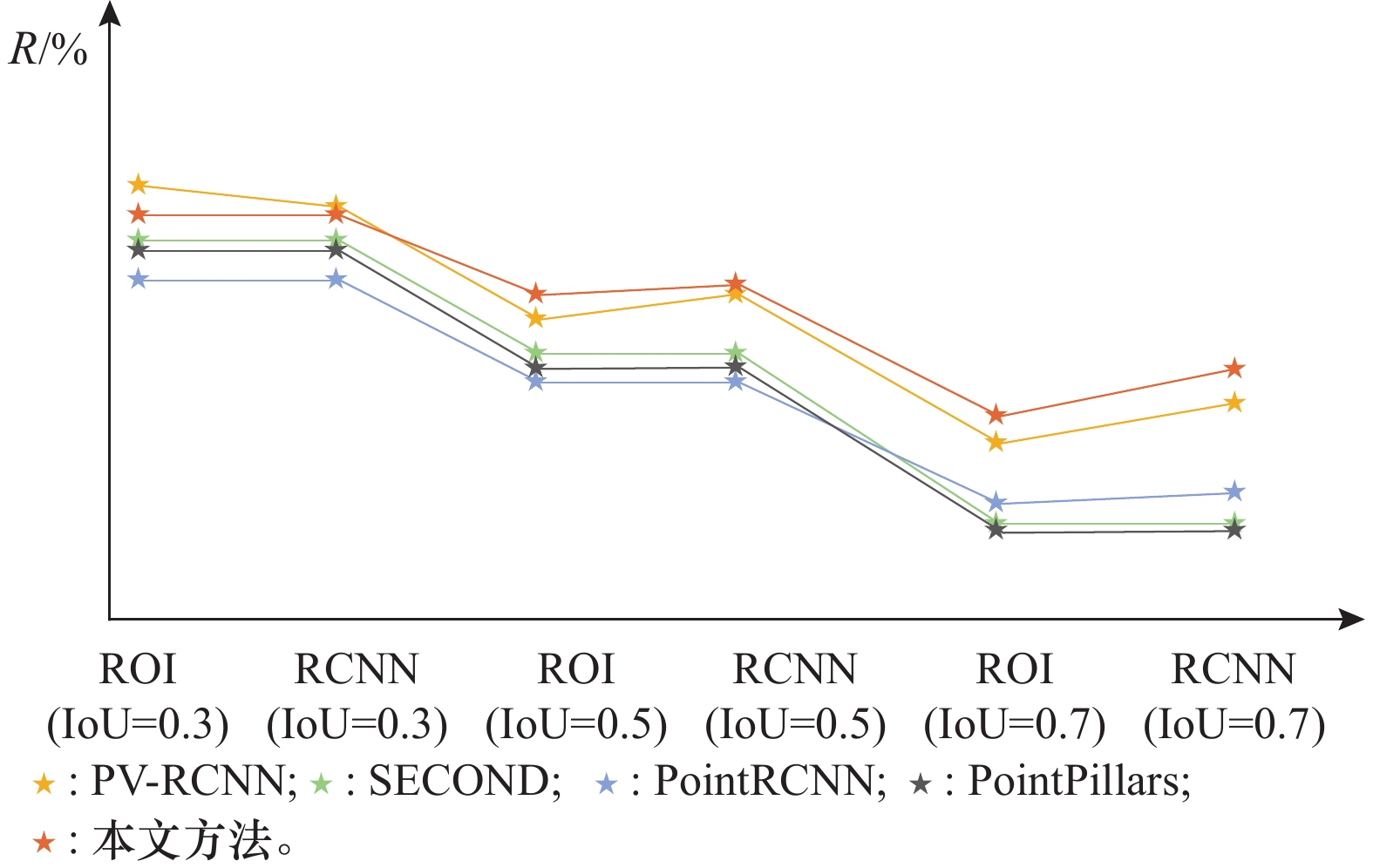
表3
不同算法运算推理时延比较"
| 方法 | PointRCNN[ | PointPillars[ | SECOND[ | PV-RCNN[ | Voxel-RCNN[ | LFED-RCNN |
| 时间 | 92.7 | 57.4 | 224.1 | 353.9 | 245.8 | 391.9 |
表4
KITTI数据集中下采样层数对性能的影响"
| 下采样层 | 下采样倍数 | mAP/% | 车mAP (IoU=0.7)/% | 行人mAP (IoU=0.5)/% | 骑行者mAP (IoU=0.5)/% |
| D4 | {1,2,4,8} | 72.14 | 84.66 | 59.34 | 72.43 |
| D5 | {1,2,4,8,16} | 72.35 | 84.71 | 59.66 | 72.68 |
| D6 | {1,2,4,8,16,32} | 72.44 | 84.87 | 59.86 | 72.61 |
表5
KITTI数据集下的消融实验"
| 下采样网络 | LEDNet | PE模块 | 车mAP(IoU=0.7) | 行人mAP(IoU=0.5) | 骑行者mAP(IoU=0.5) |
| × | × | × | 84.66 | 59.34 | 72.43 |
| √ | × | × | 84.87 | 59.86 | 72.61 |
| √ | × | √ | 84.92 | 61.03 | 72.69 |
| √ | √ | × | 85.10 | 62.12 | 72.81 |
| √ | √ | √ | 85.36 | 62.73 | 73.56 |

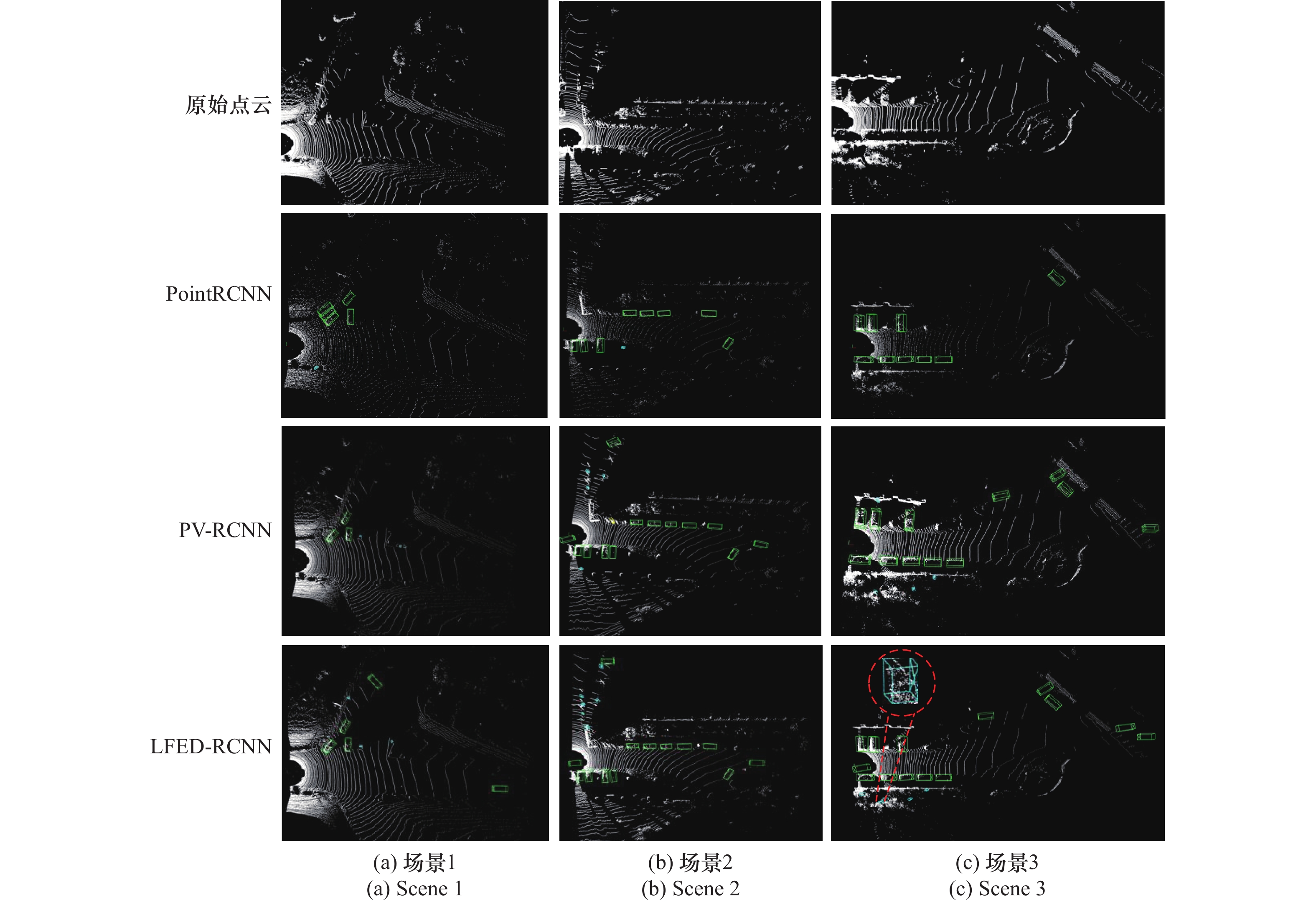
图8
可视化结果"
| 1 | ZHOU Y S, HE Y, ZHU H Z, et al. Monocular 3D object detection: an extrinsic parameter free approach[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 7556−7566. |
| 2 | DUAN K W, BAI S, XIE L X, et al. Centernet: keypoint triplets for object detection[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2019: 6569−6578. |
| 3 | LIAN Q, LI P L, CHEN X Z. MonoJSG: joint semantic and geometric cost volume for monocular 3D object detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 1070−1079. |
| 4 | SHI S S, WANG X G, LI H S. PointRCNN: 3D object proposal generation and detection from point cloud[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 770−779. |
| 5 | LANG A H, VORA S, CAESAR H, et al. Pointpillars: fast encoders for object detection from point clouds[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 12697−12705. |
| 6 | SHI S S, GUO C Y, JIANG L, et al. PV-RCNN: point-voxel feature set abstraction for 3D object detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 10529−10538. |
| 7 | QI C R, SU H, MO K C, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 652−660. |
| 8 | NABATI R, QI H R. Centerfusion: center-based radar and camera fusion for 3D object detection[C]//Proc. of the IEEE/CVF Winter Conference on Application of Computer Vision, 2021: 1527−1536. |
| 9 | LI Y W, YU A W, MENG T J, et al. Deepfusion: lidar-camera deep fusion for multi-modal 3D object detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 17182−17191. |
| 10 | BAI X Y, HU Z Y, ZHU X G, et al. Transfusion: robust lidar-camera fusion for 3D object detection with transformers[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 1090−1099. |
| 11 | ZHANG Y F, HU Q Y, XU G Q, et al. Not all points are equal: learning highly efficient point-based detectors for 3D lidar point clouds[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 18953−18962. |
| 12 | SU Z, LIANG X H, YANG S, et al. PFSC: pyramid R-CNN for point-voxels with focal sparse convolutional networks for 3D object detection[C]//Proc. of the 2024 IEEE International Conference on Mechatronics and Automation, 2024: 1843−1848. |
| 13 | ZHANG Y A, CHEN J X, HUANG D. Cat-det: contrastively augmented transformer for multi-modal 3D object detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 908−917. |
| 14 |
李娇娇, 孙红岩, 董雨, 等. 基于深度学习的3维点云处理综述[J]. 计算机研究与发展, 2022, 59 (5): 1160- 1179.
doi: 10.7544/issn1000-1239.20210131 |
|
LI J J, SUN H Y, DONG Y, et al. Review of 3D point cloud processing based on deep learning[J]. Journal of Computer Research and Development, 2022, 59 (5): 1160- 1179.
doi: 10.7544/issn1000-1239.20210131 |
|
| 15 | SHI Y S, ZHANG X K, DENG Y L, et al. Multilevel feature aggregation network with efficient voxel-to-keypoint encoding for 3D object detection on point clouds[C]//Proc. of the Chinese Control Conference, 2024: 7866−7872. |
| 16 | HU Y H, DING Z Z, GE R Z, et al. AFDetV2: rethinking the necessity of the second stage for object detection from point clouds[C] //Proc. of the AAAI Conference on Artificial Intelligence, 2022, 36(1): 969−979. |
| 17 | JU B, ZOU Z K, YE X Q, et al. Paint and distill: boosting 3D object detection with semantic passing network[C]//Proc. of the 30th ACM International Conference on Multimedia, 2022: 5639−5648. |
| 18 | WU H, WEN C L, LI W, et al. Transformation-equivariant 3D object detection for autonomous driving[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2023, 37(3): 2795−2802. |
| 19 | CHEN X S, SHI S S, ZHU B J, et al. MPPNet: multi-frame feature intertwining with proxy points for 3D temporal object detection[C] //Proc. of the European Conference on Computer Vision, 2022: 680−697. |
| 20 |
YAN Y, MAO Y X, LI B. Second: sparsely embedded convolutional detection[J]. Sensors, 2018, 18 (10): 3337.
doi: 10.3390/s18103337 |
| 21 | 陆军, 李杨, 鲁林超. 远距离和遮挡下三维目标检测算法研究[J]. 智能系统学报, 2024, 19 (2): 259- 266. |
| LU J, LI Y, LU L C. Research on 3D target detection algorithm under long distance and occlusion[J]. CAAI Transactions on Intelligent Systems, 2024, 19 (2): 259- 266. | |
| 22 | DENG J J, SHI S S, LI P W, et al. Voxel R-CNN: towards high performance voxel-based 3D object detection[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2021, 35(2): 1201−1209. |
| 23 | YIN T W, ZHOU X Y, KRAHENBUHL P. Center-based 3D object detection and tracking[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 11784−11793. |
| 24 | SONG Z Y, ZHANG G X, XIE J, et al. Voxelnextfusion: a simple, unified and effective voxel fusion framework for multi-modal 3D object detection[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2023, 2181−2191. |
| 25 | ZHENG W, TANG W L, CHEN S J, et al. CIA-SSD: confident IoU-aware single-stage object detector from point cloud[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2021, 35(4): 3555−3562. |
| 26 | LI Y J, YANG S, ZHENG Y C, et al. Improved point-voxel region convolutional neural network: 3D object detectors for autonomous driving[J]. IEEE Trans. on Intelligent Transportation Systems, 2021, 23 (7): 9311- 9317. |
| 27 | 李宇轩, 陈壹华, 温兴, 等. 改进Point-Voxel特征提取的3D小目标检测[J]. 微电子学与计算机, 2023, 40 (2): 50- 58. |
| LI Y X, CHEN Y H, WEN X, et al. 3D small target detection using improved Point-Voxel feature extraction[J]. Microelectronics and Computers, 2023, 40 (2): 50- 58. | |
| 28 | SHI S S, WANG Z, SHI J P, et al. From points to parts: 3D object detection from point cloud with part-aware and part aggregation network[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2020, 43 (8): 2647- 2664. |
| 29 | GUAN T R, WANG J, LAN S Y, et al. M3DETR: multi-representation, multi-scale, mutual-relation 3D object detection with transformers[C]//Proc. of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2022: 772−782. |
| 30 | XIE S Y, KONG L D, ZHANG W W, et al. RoboBEV: towards robust bird’s eye view perception under corruptions[EB/OL]. [2024− 05−10]. https://arxiv.org/abs/2304.06719. |
| 31 | DONG Y P, KANG C X, ZHANG J L, et al. Benchmarking robustness of 3D object detection to common corruptions[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 1022−1032. |
| 32 | MAO J G, XUE Y J, NIU M Z, et al. Voxel transformer for 3D object detection[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 3164−3173. |
| 33 | SUN P, TAN M X, WANG W Y, et al. Swformer: sparse window transformer for 3D object detection in point clouds[C]//Proc. of the European Conference on Computer Vision, 2022: 426−442. |
| 34 | FENG X Y, DU H M, FAN H H, et al. Seformer: structure embedding transformer for 3D object detection[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2023, 37(1): 632−640. |
| 35 | WANG H Y, SHI C, SHI S S, et al. DSVT: dynamic sparse voxel transformer with rotated sets[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 13520−13529. |
| 36 | FAN L, PANG Z Q, ZHANG T Y, et al. Embracing single stride 3D object detector with sparse transformer[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 8458−8468. |
| 37 | 宋存利, 柴伟琴, 张雪松. 基于改进YOLO v5算法的道路小目标检测[J]. 系统工程与电子技术, 2024, 46 (10): 3271- 3278. |
| SONG C L, CHAI W Q, ZHANG X S. Road small target detection based on improved YOLOv5 algorithm[J]. Systems Engineering and Electronics, 2024, 46 (10): 3271- 3278. | |
| 38 | 陈晓萱, 徐书文, 胡绍海, 等. 基于卷积与自注意力的红外与可见光图像融合[J]. 系统工程与电子技术, 2024, 46 (8): 2641- 2649. |
| CHEN X X, XU S W, HU S H, et al. Infrared and visible image fusion based on convolution and self-attention[J]. Systems Engineering and Electronics, 2024, 46 (8): 2641- 2649. | |
| 39 | OUYANG D L, HE S, ZHANG G Z, et al. Efficient multi-scale attention module with cross-spatial learning[C]//Proc. of the IEEE International Conference on Acoustics, 2023. |
| 40 | LI X, HU X L, YANG J. Spatial group-wise enhance: improving semantic feature learning in convolutional networks[EB/OL]. [2024−05−10]. https://arxiv.org/abs/1905.09646. |
| 41 | HU J, SHEN L, SUN G. Squeeze-and- excitation networks[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 7132−7141. |
| 42 | 邵凯, 王明政, 王光宇. 基于Transformer的多尺度遥感语义分割网络[J]. 智能系统学报, 2024, 19 (2): 920- 929. |
| SHAO K, WANG M Z, WANG G Y. Transformer-based multiscale remote sensing semantic segmentation network[J]. CAAI Transactions on Intelligent Systems, 2024, 19 (2): 920- 929. | |
| 43 | 梁燕, 易春霞, 王光宇, 等. 基于多尺度语义编解码网络的遥感图像语义分割[J]. 电子学报, 2023, 51 (11): 3199- 3214. |
| LIANG Y, YI C X, WANG G Y, et al. Semantic segmentation of remote sensing images based on multi-scale semantic encoding and decoding network[J]. Acta Electronica Sinica, 2023, 51 (11): 3199- 3214. | |
| 44 |
梁燕, 易春霞, 王光宇. 基于编解码网络UNet3+的遥感影像建筑变化检测[J]. 计算机学报, 2023, 46 (8): 1720- 1733.
doi: 10.11897/SP.J.1016.2023.01720 |
|
LIANG Y, YI C X, WANG G Y. Building change detection in remote sensing images based on encoding and decoding network UNet3+[J]. Journal of Computer Science, 2023, 46 (8): 1720- 1733.
doi: 10.11897/SP.J.1016.2023.01720 |
|
| 45 |
SHI S S, JIANG L, DENG J J, et al. PV-RCNN++: point-voxel feature set abstraction with local vector representation for 3D object detection[J]. International Journal of Computer Vision, 2023, 131 (2): 531- 551.
doi: 10.1007/s11263-022-01710-9 |
| 46 |
TONG G F, LI Z, PENG H, et al. Multi-source features fusion single stage 3D object detection with transformer[J]. IEEE Robotics and Automation Letters, 2023, 8 (4): 2062- 2069.
doi: 10.1109/LRA.2023.3244124 |
| 47 | YIN T W, ZHOU X Y, PHILIPP K. Center-based 3D object detection and tracking[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 11779−11788. |
| 48 | VORA S, LANG A H, HELOU B, et al. PointPainting: sequential fusion for 3D object detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 4603−4611. |
| [1] | 何肖阳, 陈小龙, 杜晓林, 苏宁远, 袁旺, 关键. 基于CBAM-Swin-Transformer迁移学习的海上微动目标分类方法[J]. 系统工程与电子技术, 2025, 47(4): 1155-1167. |
| [2] | 沈夏闰, 李若楠, 张昊田. 基于CVAE-LSTM的服务器KPI异常检测[J]. 系统工程与电子技术, 2025, 47(3): 1019-1027. |
| [3] | 陈晓萱, 徐书文, 胡绍海, 马晓乐. 基于卷积与自注意力的红外与可见光图像融合[J]. 系统工程与电子技术, 2024, 46(8): 2641-2649. |
| [4] | 王彩云, 张慧雯, 王佳宁, 吴钇达, 常韵. 基于DTCWT-VAE的弹道中段目标RCS识别[J]. 系统工程与电子技术, 2024, 46(7): 2269-2275. |
| [5] | 薛丽莎, 葛瑞星, 朱宇轩, 鲍雁飞. 基于SABEGAN的通信干扰信号生成与效能分析[J]. 系统工程与电子技术, 2024, 46(6): 2155-2163. |
| [6] | 阳鹏飞, 何羚, 王茜, 王睿笛, 张明志. 基于混合信号多域特征和Transformer的干扰识别[J]. 系统工程与电子技术, 2024, 46(6): 2138-2145. |
| [7] | 马兰, 孟诗君, 吴志军. 基于BERT与生成对抗的民航陆空通话意图挖掘[J]. 系统工程与电子技术, 2024, 46(2): 740-750. |
| [8] | 刘子昌, 白永生, 李思雨, 贾希胜. 基于小波时频图与Swin Transformer的柴油机故障诊断方法[J]. 系统工程与电子技术, 2023, 45(9): 2986-2998. |
| [9] | 丁建立, 张琪琪, 王静, 霍纬纲. 基于Transformer-VAE的ADS-B异常检测方法[J]. 系统工程与电子技术, 2023, 45(11): 3680-3689. |
| [10] | 陈毓坤, 于晖, 陆宁云. 基于半监督深度学习的雷达收发组件故障诊断[J]. 系统工程与电子技术, 2023, 45(10): 3329-3337. |
| [11] | 钱坤, 李晨瑄, 陈美杉, 郭继伟, 潘磊. 基于改进Swin Transformer的舰船目标实例分割算法[J]. 系统工程与电子技术, 2023, 45(10): 3049-3057. |
| [12] | 眭海刚, 李嘉杰, 苟国华. 基于异源影像匹配的无人机在线快速定位方法[J]. 系统工程与电子技术, 2023, 45(10): 3008-3015. |
| [13] | 曹鹏宇, 杨承志, 石礼盟, 吴宏超. 基于DAE-GAN网络的LPI雷达信号增强[J]. 系统工程与电子技术, 2021, 43(9): 2493-2500. |
| [14] | 张国令, 吴崇明, 李睿, 来杰, 向前. 基于一维堆叠池化融合卷积自编码器的HRRP目标识别方法[J]. 系统工程与电子技术, 2021, 43(12): 3533-3541. |
| [15] | 霍超颖, 闫华, 冯雪健, 殷红成, 邢笑宇, 陆金文. HRRP稀疏自编码器深层特征与散射中心特征的关联性研究[J]. 系统工程与电子技术, 2021, 43(11): 3040-3053. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||