
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (12): 4166-4173.doi: 10.12305/j.issn.1001-506X.2025.12.28
• 制导、导航与控制 • 上一篇
冯建鑫, 李昊阳, 巩建雄, 龚柏春
收稿日期:2024-07-17
修回日期:2024-11-01
出版日期:2025-01-02
发布日期:2025-01-02
通讯作者:
冯建鑫
作者简介:李昊阳(1995—),男,硕士研究生,主要研究方向为复合轴控制基金资助:Jianxin FENG, Haoyang LI, Jianxiong GONG, Baichun GONG
Received:2024-07-17
Revised:2024-11-01
Online:2025-01-02
Published:2025-01-02
Contact:
Jianxin FENG
摘要:
针对超声电机强非线性和时变性,提出一种基于改进鲸鱼优化算法(whale optimization algorithm, WOA)的自抗扰控制(active disturbance rejection control, ADRC)方法。首先,将改进线性ADRC与Smith预估器结合,设计三阶ADRC器。然后,采用WOA对控制器参数进行优化,并对传统WOA进行改进。将tent混沌映射应用于种群初始化并引入K-means++聚类算法实现种群分类,对不同类别种群采用相应收敛因子,同时设计非线性惯性权重,进一步提高算法的优化效果。最后,在考虑摩擦的情况下用粒子群优化算法、蜻蜓算法、改进前后的WOA分别优化所设计的控制器,并通过仿真验证了所提方法的有效性。
中图分类号:
冯建鑫, 李昊阳, 巩建雄, 龚柏春. 基于改进鲸鱼优化算法的超声电机自抗扰控制[J]. 系统工程与电子技术, 2025, 47(12): 4166-4173.
Jianxin FENG, Haoyang LI, Jianxiong GONG, Baichun GONG. Ultrasonic motor ADRC based on improved whale optimization algorithm[J]. Systems Engineering and Electronics, 2025, 47(12): 4166-4173.
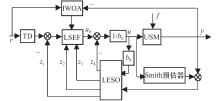
图1
控制器总体结构"
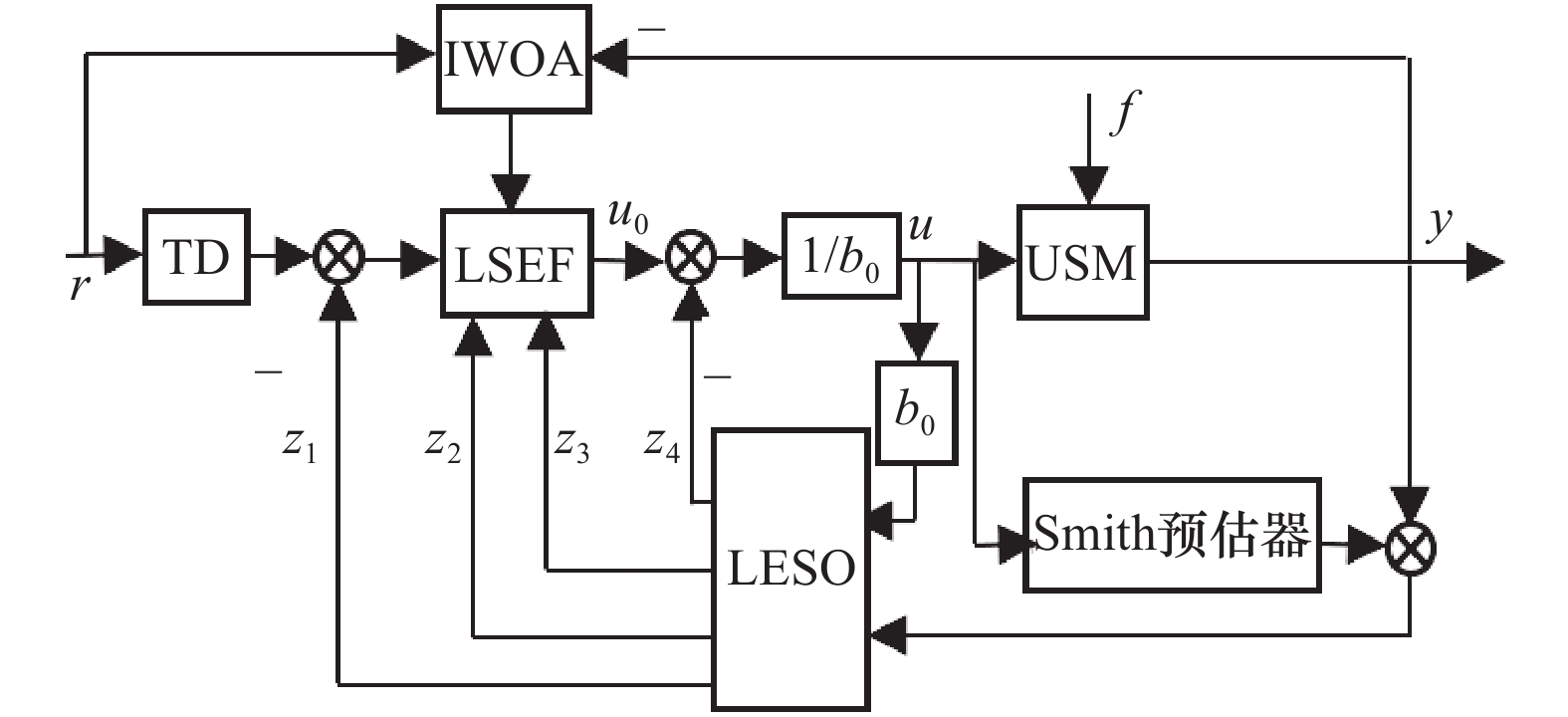
表1
标准测试函数"
| 函数 | 维数 | 取值范围 | 理论极值 |
| 30 | [−100,100] | 0 | |
| 30 | [−10,10] | 0 | |
| 30 | [−100,100] | 0 | |
| 30 | [−5.12,5.12] | 0 | |
| 30 | [−32,32] | 0 | |
| 30 | [−600,600] | 0 |
表2
标准测试函数结果"
| 函数 | 算法 | 最优值 | 平均值 | 最差值 | 标准差 |
| PSO | 3.03e-08 | 2.24e-07 | 1.05e-06 | 2.30e-07 | |
| DA | 1.99e+03 | 6.67e+03 | 1.42e+04 | 2.82e+03 | |
| WOA | 4.43e-29 | 3.37e-22 | 8.59e-21 | 1.57e-21 | |
| IWOA | 1.48e-96 | 1.14e-90 | 2.04e-89 | 3.78e-90 | |
| PSO | 2.10e-06 | 3.45e-05 | 1.89e-04 | 3.82e-05 | |
| DA | 5.854 | 31.988 | 1.14e+02 | 21.883 | |
| WOA | 4.97e-22 | 4.22e-18 | 6.59e-17 | 1.27e-17 | |
| IWOA | 1.07e-54 | 8.95e-50 | 2.54e-48 | 4.63e-49 | |
| PSO | 0.378 | 1.109 | 2.894 | 0.555 | |
| DA | 27.766 | 45.619 | 63.310 | 10.540 | |
| WOA | 2.947 | 64.288 | 89.807 | 23.532 | |
| IWOA | 8.27e-34 | 4.40e-31 | 2.71e-30 | 6.36e-31 | |
| PSO | 16.141 | 35.717 | 1.42e+02 | 22.838 | |
| DA | 1.22e+02 | 2.08e+02 | 3.14e+02 | 49.175 | |
| WOA | 0 | 16.167 | 2.51e+02 | 60.753 | |
| IWOA | 0 | 0 | 0 | 0 | |
| PSO | 6.41e-05 | 11.976 | 19.967 | 9.945 | |
| DA | 8.665 | 14.713 | 18.182 | 1.955 | |
| WOA | 1.47e-14 | 1.84e-12 | 3.66e-11 | 6.70e-12 | |
| IWOA | 4.44e-16 | 2.69e-15 | 4.00e-15 | 1.74e-15 | |
| PSO | 5.42e-08 | 0.012 | 0.042 | 0.013 | |
| DA | 18.519 | 60.228 | 1.23e+02 | 23.219 | |
| WOA | 0 | 1.48e-17 | 1.11e-16 | 3.84e-17 | |
| IWOA | 0 | 0 | 0 | 0 |
表3
LuGre模型参数"
| 2.444 | 0.599 | 0.010 | 0.477 | 0.270 | 0.005 |
表4
阶跃信号参数优化结果"
| 参数 | WOA | DA | IWOA | PSO |
| 3 028.663 | 2 054.116 | 8 175.719 | 9 910.667 | |
| 1 262 280 | 1 200 767 | 922 164.9 | 663 146.6 | |
| 317.715 | 393.607 | 294.318 | 400 | |
| 100.837 | 144.513 | 300.293 | 171.269 | |
| 283.867 | 295.213 | 302.659 | 205.391 | |
| 1 419.399 | 671.389 | 401.082 | ||
| 0.003 | 0.002 85 | 0.002 317 | 0.001 554 | |
| 最小适应度值 | 0.000 228 | 0.000 256 | 0.000 146 | 0.000 178 |
图2
跟踪阶跃信号适应度值收敛曲线"
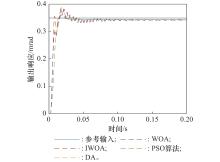
图3
阶跃响应对比"
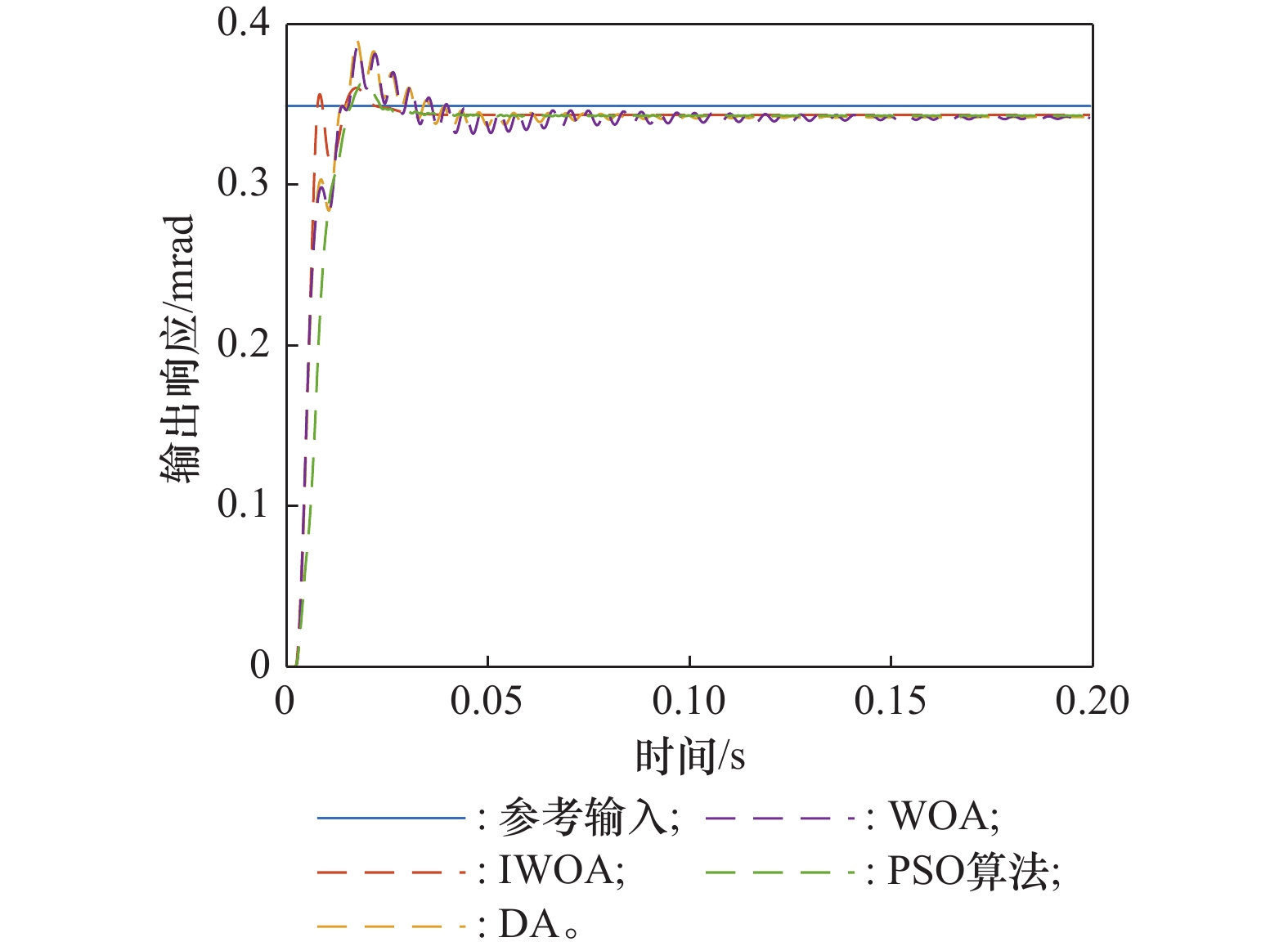
表5
正弦信号参数优化结果"
| 参数 | WOA | DA | IWOA | PSO |
| 5 440.736 | 17 365.56 | 18 637.47 | 18 907.12 | |
| 1 186 601 | 2 000 000 | 1 923 256 | 1 361 394 | |
| 124.408 | 122.927 | 146.170 | 71.383 | |
| 272.092 | 57.556 | 50 | 71.383 | |
| 247.850 | 256.410 | 50 | 72.712 | |
| 5 647.49 | 8 136.524 | 10 000 | 8 934.579 | |
| 0.000 778 | 0.000 541 | 0.000 11 | 0.000 18 | |
| 最小适应度值 | 1.488 | 0.934 | 0.196 | 0.349 |
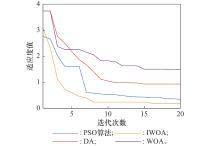
图4
跟踪正弦信号适应度值收敛曲线"
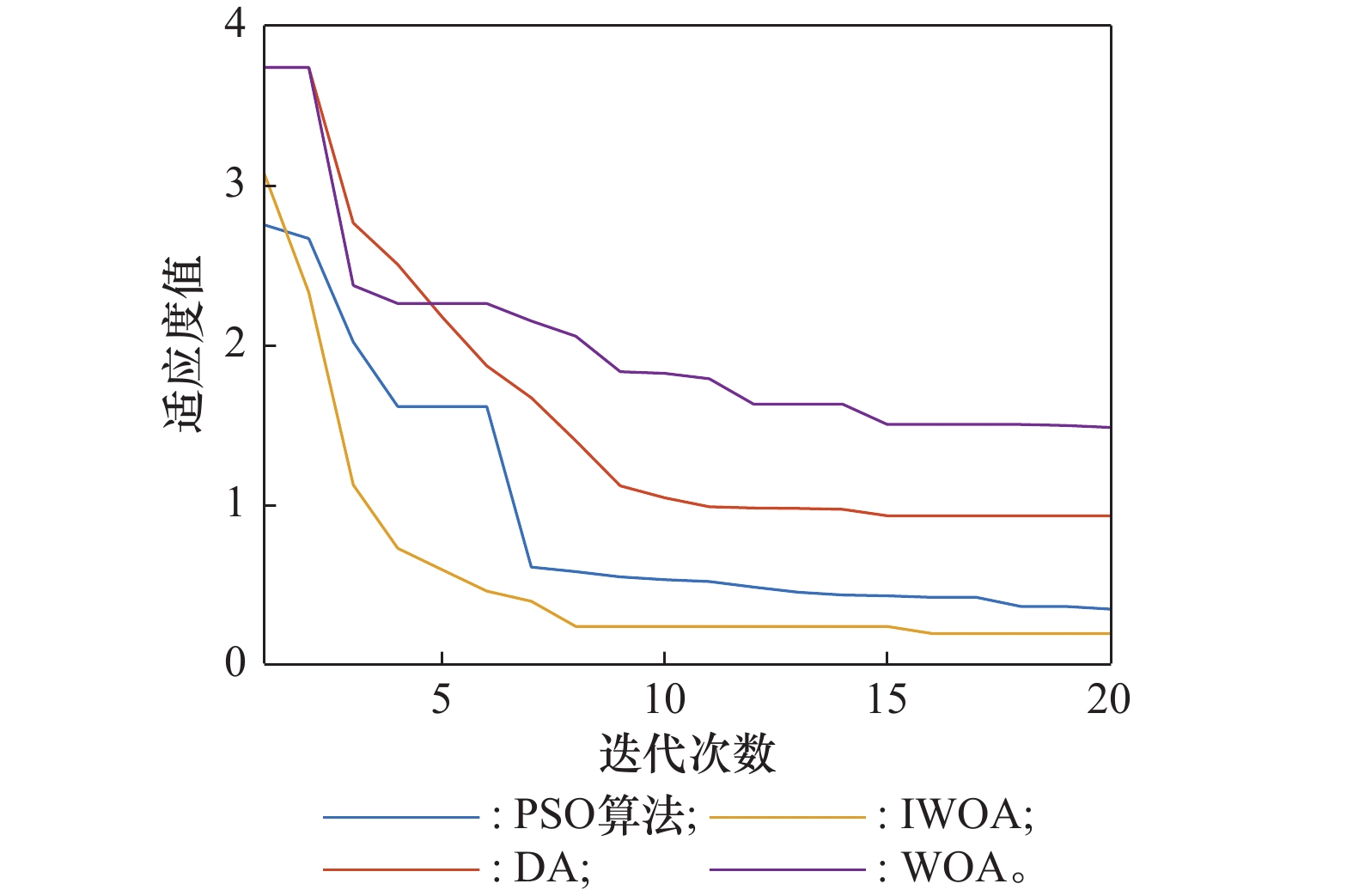

图5
跟踪正弦信号位置误差对比"
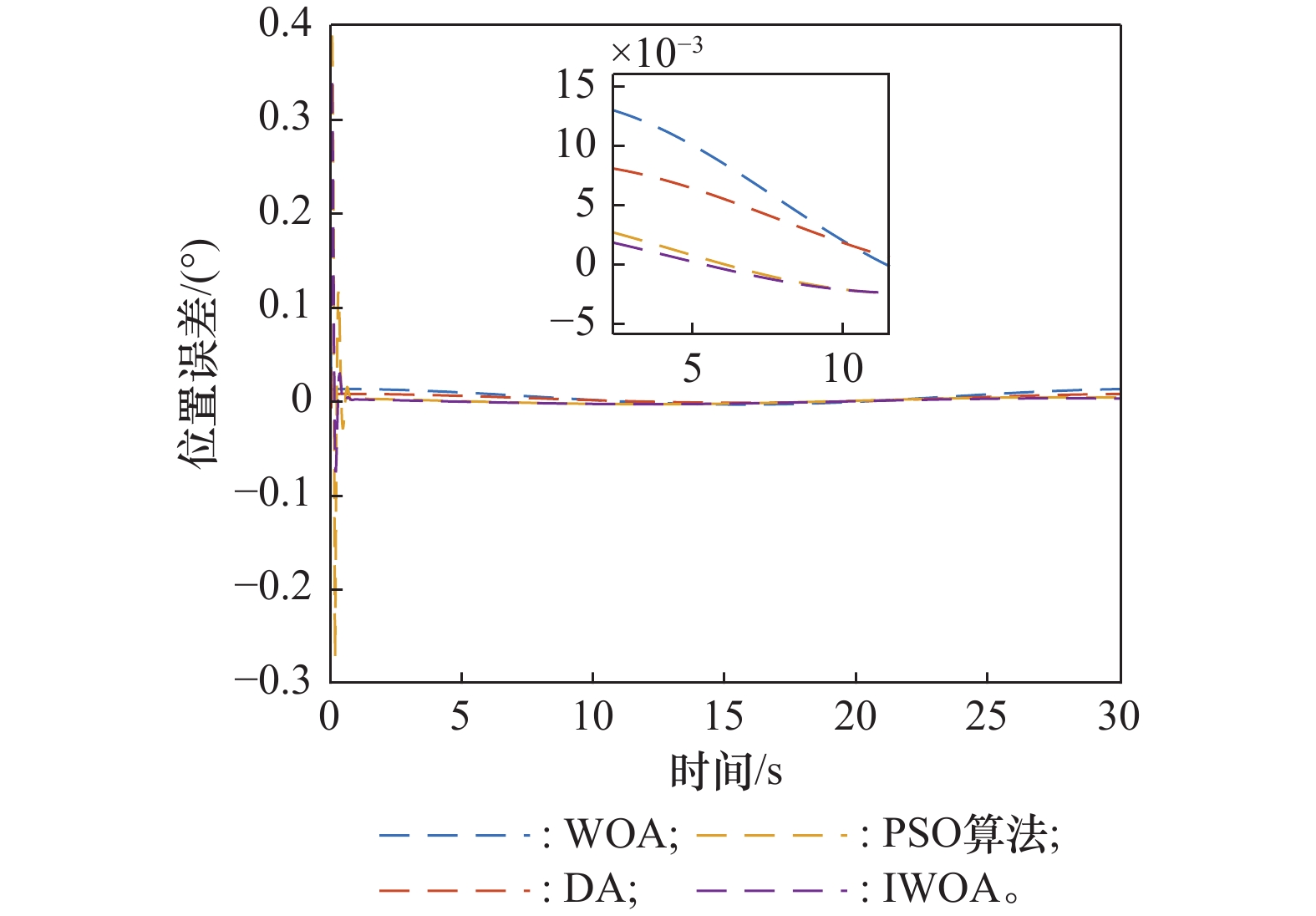
表6
斜坡信号参数优化结果"
| 参数 | WOA | DA | IWOA | PSO |
| 4 326.858 | 1 915.435 | 3 962.961 | 1 968.237 | |
| 1 887 034 | 2 000 000 | 1 958 052 | 1 904 391 | |
| 356.406 | 245.044 | 279.786 | 394.016 | |
| 112.821 | 370.728 | 127.205 | 50 | |
| 301.659 | 147.956 | 223.953 | 378.960 | |
| 737.748 | 2 978.886 | 2 967.428 | 2 116.098 | |
| 0.000 186 | 0.000 02 | 0.000 016 | 0.000 089 | |
| 最小适应度值 | 0.000 128 | 0.000 044 | 0.000 037 | 0.000 062 |
图6
跟踪斜坡信号适应度值收敛曲线"
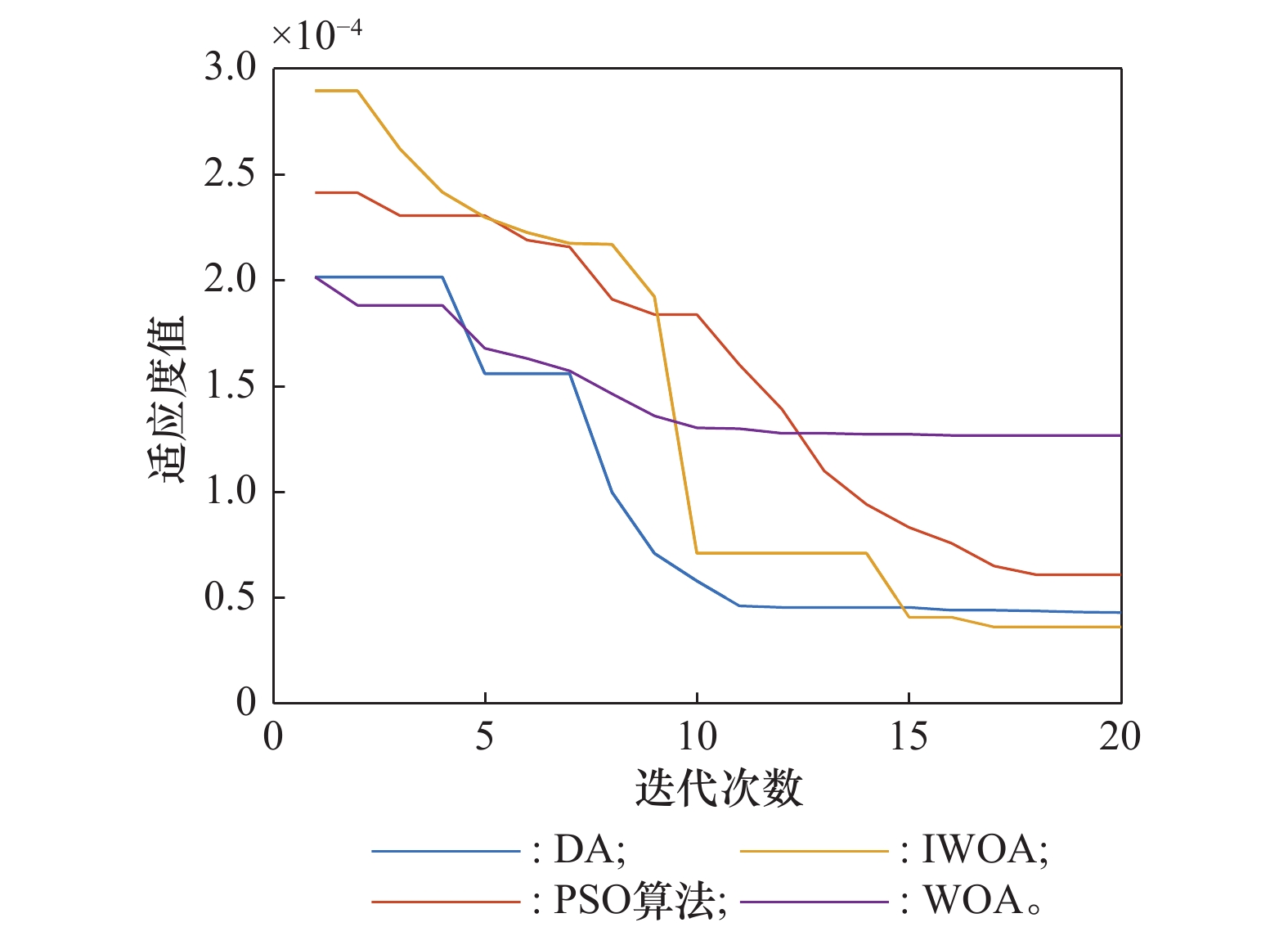

图7
跟踪斜坡信号位置误差对比"
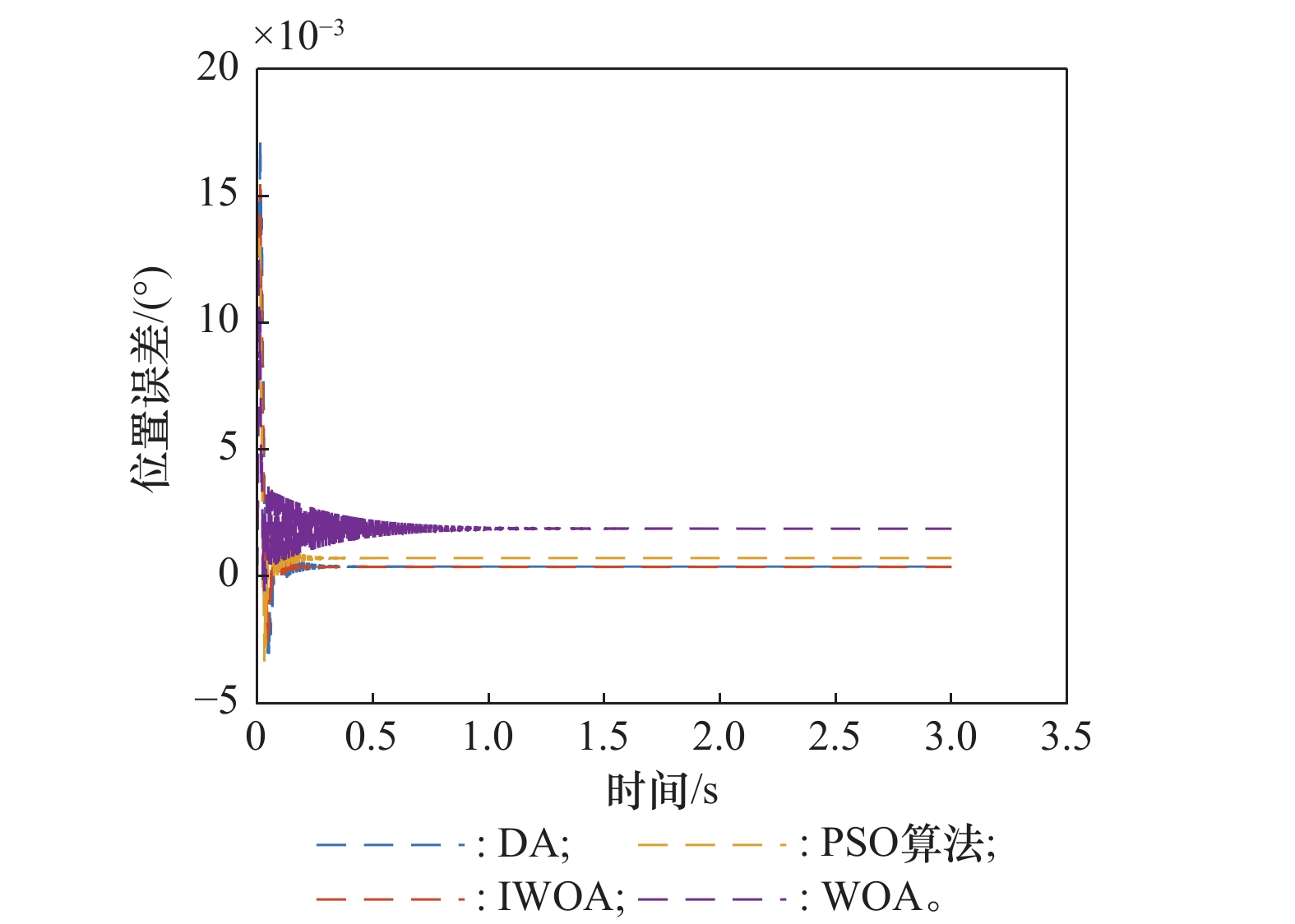
图8
跟踪斜坡信号稳态误差傅里叶曲线"
| 1 | STORCK H, LITTMANN W, WALLASCHEK J, et al. The effect of friction reduction in presence of ultrasonic vibrations and its relevance to travelling wave ultrasonic motors[J]. Ultrasonics, 2002, 40 (1/8): 379- 383. |
| 2 | OLOFSSON J, LINDBERG F, JOHANSSON S, et al. On the role of tribofilm formation on the alumina drive components of an ultrasonic motor[J]. Wear, 2009, 267 (5/8): 1295- 1300. |
| 3 | ZHANG Y H, FU Y H, HUA X J, et al. Wear debris of friction materials for linear standing-wave ultrasonic motors: theory and experiments[J]. Wear, 2020, 448-449: 203216. |
| 4 | LI X N, WEN Z Y, JIA B T, et al. A review of application and development trends in ultrasonic motors[J]. ES Materials & Manufacturing, 2020, 12, 3- 16. |
| 5 |
XU D M, ZHANG B J, YU S M, et al. Review on single-phase driven ultrasonic motors[J]. Journal of Intelligent Material Systems and Structures, 2023, 34 (5): 525- 535.
doi: 10.1177/1045389X221121911 |
| 6 |
LIU Z, FU Q W, YANG P, et al. Design and performance evaluation of a miniature I-shaped linear ultrasonic motor with two vibrators[J]. Ultraso-nics, 2023, 131, 106965.
doi: 10.1016/j.ultras.2023.106965 |
| 7 |
WANG G Q, SONG J F, ZHAO G, et al. Improving output performance of ultrasonic motor by coating MoS2 on the stator[J]. Tribology International, 2023, 186, 108608.
doi: 10.1016/j.triboint.2023.108608 |
| 8 |
MUSTAFA A, SASAMURA T, MORITA T. Robust speed control of ultrasonic motors based on deep reinforcement learning of a Lyapunov function[J]. IEEE Access, 2022, 10, 46895- 46910.
doi: 10.1109/ACCESS.2022.3170995 |
| 9 |
GARRIDO R, LUNA L. Robust ultra-precision motion control of linear ultrasonic motors: a combined ADRC-Luenberger observer approach[J]. Control Engineering Practice, 2021, 111, 104812.
doi: 10.1016/j.conengprac.2021.104812 |
| 10 | MING M, LIANG W Y, FENG Z, et al. PID-type sliding mode-based adaptive motion control of a 2-DOF piezoelectric ultrasonicmotor driven stage[J]. Mechatronics, 2021, 76: 102543. |
| 11 |
SONG L, SHI J Z. Adaptive PI control of ultrasonic motor using iterative learning methods[J]. ISA Transactions, 2023, 139, 499- 509.
doi: 10.1016/j.isatra.2023.03.032 |
| 12 | KEBBAB F Z, JABRI D, BELKHIAT D E C, et al. Frequency speed control of rotary travelling wave ultrasonic motor using fuzzy controller[J]. Engineering, Technology & Applied Science Research, 2018, 8(4): 3276−3281. |
| 13 | SHI J Z, HUANG W W, ZHOU Y. T–S fuzzy control of travelling-wave ultrasonic motor[J]. Journal of Control, Automation and Electrical Systems, 2020, 31 (2): 319- 328. |
| 14 | MUSTAFA A, SASAMURA T, MORITA T. Sensorless speed control of ultrasonic motors using deep reinforcement learning[J]. IEEE Sensors Journal, 2023, 24(3): 4023−4035. |
| 15 |
JIANG Y, WANG F, SASAMURA T, et al. Dynamic characteristics and deep reinforcement learning of proportional-integral-differential controller for quadruped stator-based ultrasonic linear motor[J]. Japanese Journal of Applied Physics, 2024, 63 (4): 04SP38.
doi: 10.35848/1347-4065/ad2f18 |
| 16 |
韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13 (1): 19- 23.
doi: 10.3321/j.issn:1001-0920.1998.01.005 |
|
HAN J Q. Active disturbance rejection controller and its applications[J]. Control and Decision, 1998, 13 (1): 19- 23.
doi: 10.3321/j.issn:1001-0920.1998.01.005 |
|
| 17 |
HAN J Q. From PID to active disturbancerejection control[J]. IEEE Trans. On Dustrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 18 |
ZHANG D Y, YAO X L, WU Q H, et al. ADR-C based control for a class of input time delay systems[J]. Journal of Systems Engineering and Electronics, 2017, 28 (6): 1210- 1220.
doi: 10.21629/JSEE.2017.06.19 |
| 19 | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//Proc. of the American Control Conference, 2003: 4989−4996. |
| 20 | GAO Z Q. Active disturbance rejection control: a paradigm shift in feedback control system design[C]//Proc. of the American Control Confe-rence, 2006: 2399−2405. |
| 21 | 王鑫. 线性自抗扰控制器参数整定及其应用研究[D]. 合肥: 安徽大学, 2022. |
| WANG X. Parameter tuning and application of linear active disturbance rejection controller[D]. Hefei: Anhui University, 2022. | |
| 22 | 李广强, 董文超, 朱大庆, 等. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45 (7): 2170- 2182. |
| LI G Q, DONG W C, ZHU D Q, et al. 3D path planning for AUV based on improved whale optimization algorithm[J]. Systems Engineering and Electronics, 2023, 45 (7): 2170- 2182. | |
| 23 |
NADIMI-SHAHRAKI M, ZAMANI H, ASGHARI V Z, et al. A systematic review of the whale optimization algorithm: theoretical foundation, improvements, and hybridizations[J]. Archives of Computational Methods in Engineering, 2023, 30 (7): 4113- 4159.
doi: 10.1007/s11831-023-09928-7 |
| 24 |
AKRAAM M, RASHID T, ZAFAR S. An image encryption scheme proposed by modifying chaotic tent map using fuzzy numbers[J]. Multimedia Tools and Applications, 2023, 82 (11): 16861- 16879.
doi: 10.1007/s11042-022-13941-6 |
| 25 |
KOPETS E, VYACHESLAV R, OLEG V, et al. Fractal tent map with application to surrogate testing[J]. Fractal and Fractional, 2024, 8 (6): 344.
doi: 10.3390/fractalfract8060344 |
| 26 |
LI H Z, WANG J. Collaborative annealing power k-means++ clustering[J]. Knowledge- Based Systems, 2022, 255, 109593.
doi: 10.1016/j.knosys.2022.109593 |
| 27 | 高程, 都延丽, 步雨浓, 等. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46 (3): 972- 981. |
| GAO C, DU Y L, BU Y N, et al. Heterogeneous UAV swarm grouping deployment for complex multiple tasks[J]. Systems Engineering and Electronics, 2024, 46 (3): 972- 981. | |
| 28 | CHATTERJEE A, SIARRY P. Nonlinear inertia weight variation for dynamic adaptation in particle swarm optimization[J]. Computers & Operations Research, 2006, 33 (3): 859- 871. |
| 29 |
YU H, GAO Y, WANG L, et al. A hybrid particle swarm optimization algorithm enhanced with nonlinear inertial weight and gaussian mutation for job shop scheduling problems[J]. Mathematics, 2020, 8, 1355.
doi: 10.3390/math8081355 |
| 30 | 冯建鑫, 王强, 王雅雷, 等. 基于改进量子遗传算法的超声电机模糊PID控制[J]. 吉林大学学报(工学版), 2021, 51 (6): 1990- 1996. |
| FENG J X, WANG Q, WANG Y L, et al. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51 (6): 1990- 1996. |
| [1] | 蒋怡, 毛雨荷, 岳程斐, 吴云华. 面向巨星座态势感知的多约束任务规划[J]. 系统工程与电子技术, 2025, 47(9): 3047-3057. |
| [2] | 王彩云, 贾一帆, 李晓飞, 王佳宁, 吴钇达. 基于改进鲸鱼算法和BiGRU的弹道目标HRRP识别方法[J]. 系统工程与电子技术, 2025, 47(6): 1824-1832. |
| [3] | 刘祥雨, 王刚, 郭相科, 付强, 李腾达. 面向区域防空场景的杀伤链设计方法[J]. 系统工程与电子技术, 2025, 47(5): 1582-1599. |
| [4] | 郭博, 铁鸣, 范文慧, 李传旭. 基于滑模控制的高升阻比飞行器协同制导方法[J]. 系统工程与电子技术, 2025, 47(2): 580-590. |
| [5] | 邓柏海, 徐锦法. 复合式无人直升机姿态控制半物理仿真验证[J]. 系统工程与电子技术, 2025, 47(2): 608-620. |
| [6] | 蔡志豪, 邢世其, 苏薪元, 汪俊澎, 孟维泽, 王浩. 基于三元组天线的多点源空间布阵方法[J]. 系统工程与电子技术, 2025, 47(11): 3574-3585. |
| [7] | 刘学浩, 刘文学, 杨超三, 祝文晶, 宋玉, 李金海. 基于GPR模型的用户量预测优化方法[J]. 系统工程与电子技术, 2024, 46(8): 2721-2729. |
| [8] | 赵昱宇, 索超, 王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法[J]. 系统工程与电子技术, 2024, 46(3): 1084-1092. |
| [9] | 王彩云, 常韵, 李晓飞, 王佳宁, 吴钇达, 张慧雯. 基于改进MKELM的红外空间锥体目标识别[J]. 系统工程与电子技术, 2024, 46(10): 3257-3264. |
| [10] | 莫昱, 唐旭东. 基于改进自抗扰控制的电动伺服系统机械谐振抑制方法[J]. 系统工程与电子技术, 2024, 46(1): 309-317. |
| [11] | 李广强, 董文超, 朱大庆, 于越, 陈浩, 于双和. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45(7): 2170-2182. |
| [12] | 杨文奇, 卢建华, 姜旭, 王元鑫. 基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44(12): 3792-3799. |
| [13] | 冯建鑫, 王雅雷, 王强, 胥彪. 基于改进粒子群算法的快速反射镜自抗扰控制[J]. 系统工程与电子技术, 2021, 43(12): 3675-3682. |
| [14] | 韩驰, 熊伟. 基于改进灰狼算法优化SVR的航天侦察装备效能评估[J]. 系统工程与电子技术, 2021, 43(10): 2902-2910. |
| [15] | 杨立本, 魏文军, 杨剑锋, 李泰国, 王栋. 横列式双旋翼矢量飞行器的改进ADRC姿态控制算法[J]. 系统工程与电子技术, 2021, 43(10): 2976-2983. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||