
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (2): 580-590.doi: 10.12305/j.issn.1001-506X.2025.02.24
• 制导、导航与控制 • 上一篇
郭博1, 铁鸣1,*, 范文慧2, 李传旭1
收稿日期:2024-01-08
出版日期:2025-02-25
发布日期:2025-03-18
通讯作者:
铁鸣
作者简介:郭博 (1999—), 男, 硕士研究生, 主要研究方向为飞行器制导与控制、飞行器智能决策规划与仿真Bo GUO1, Ming TIE1,*, Wenhui FAN2, Chuanxu LI1
Received:2024-01-08
Online:2025-02-25
Published:2025-03-18
Contact:
Ming TIE
摘要:
针对多个高升阻比飞行器在飞行中间段的时间协同问题, 提出一种基于滑模控制的高升阻比飞行器协同制导方法, 建立多个高升阻比飞行器协同飞行力学模型, 设计规划飞行器在中间段制导过程中的飞行程序与针对飞行器侧向机动的滑模控制策略。通过设计标称轨迹, 对控制参数进行优化, 进而生成各个飞行器不同初始条件所需的侧向过载并通过侧向过载得到所需的倾侧角指令, 以实现对飞行器飞行时间的控制, 从而使多飞行器能够同时到达目标点上方设定范围; 考虑飞行器始末条件和状态约束, 使飞行器能够满足协同任务需求。利用李雅普诺夫稳定性判据证明系统的稳定性以及滑模面非奇异性, 仿真结果表明, 该协同制导策略具备一定抗干扰性, 能够满足异地非同步发射的多个飞行器协同制导需求。
中图分类号:
郭博, 铁鸣, 范文慧, 李传旭. 基于滑模控制的高升阻比飞行器协同制导方法[J]. 系统工程与电子技术, 2025, 47(2): 580-590.
Bo GUO, Ming TIE, Wenhui FAN, Chuanxu LI. Cooperative guidance method of high lift-to-drag ratio aircraft based on sliding mode control[J]. Systems Engineering and Electronics, 2025, 47(2): 580-590.

图1
飞行器制导几何"

表1
3枚飞行器初始条件"
| 参数 | 飞行器1 | 飞行器2 | 飞行器3 |
| 高度/km | 36.11 | 36.21 | 36.32 |
| 速度/(m/s-1) | 4 973.60 | 4 974.80 | 4 977.50 |
| 经度/(°) | 105.45 | 101.81 | 98.67 |
| 纬度/(°) | 42.19 | 38.88 | 26.98 |
| 航迹倾角/(°) | -13.90 | -13.80 | -13.80 |
| 航向角/(°) | 118.10 | 111.60 | 97.80 |
表2
飞行器的目标点与终端约束"
| 参数 | 取值 |
| 经度/(°) | 144.75 |
| 纬度/(°) | 13.50 |
| 高度H/km | 28≤H≤32 |
| S*/km | 140 |
表3
3枚飞行器控制参数M的值"
| 飞行器编号 | M值 |
| 飞行器1 | 70.22 |
| 飞行器2 | 15.79 |
| 飞行器3 | 32.07 |
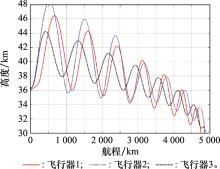
图2
3枚飞行器的航程-高度飞行剖面"


图3
3枚飞行器经纬度轨迹"


图4
3枚飞行器高度随时间变化"


图5
3枚飞行器速度度随时间变化"


图6
3枚飞行器过程约束随时间变化"


图7
3枚飞行器倾侧角随时间变化"


图8
3枚飞行器攻角随时间变化"
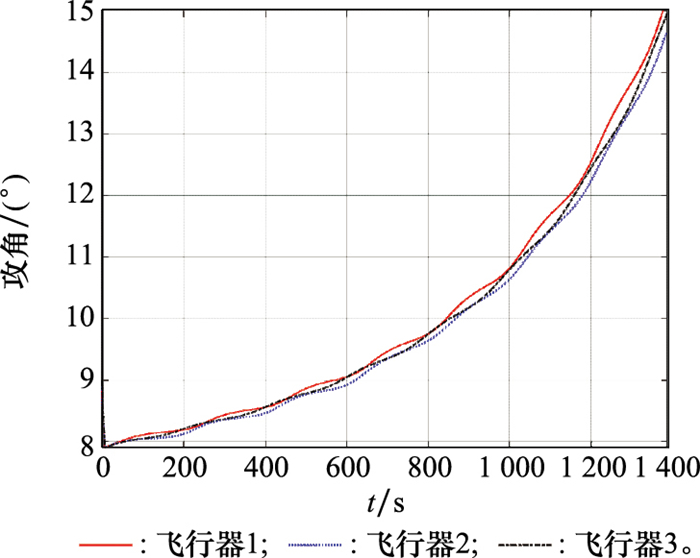
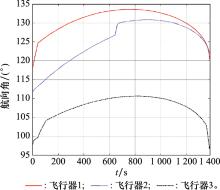
图9
3枚飞行器航向角随时间变化"
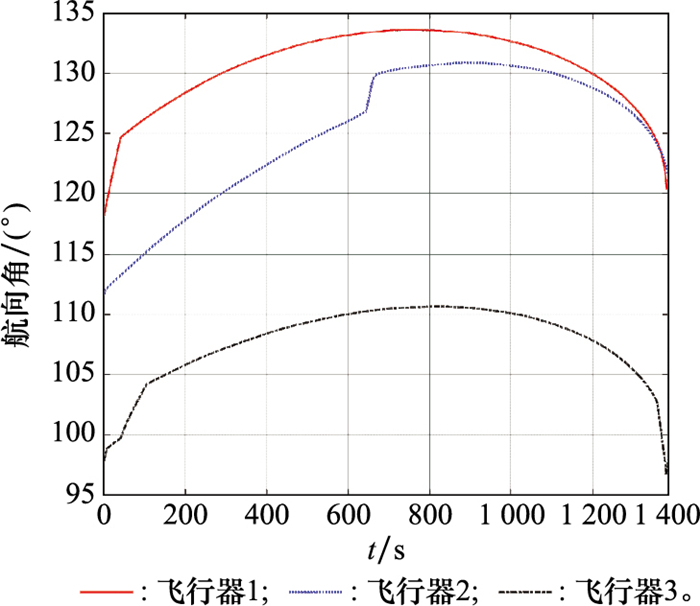

图10
3枚飞行器前置角随时间变化"

表4
3枚飞行器终端状态"
| 参数 | 飞行器1 | 飞行器2 | 飞行器3 |
| 飞行时间/s | 1 385.500 0 | 1 385.400 0 | 1 387.000 0 |
| 终点经度/(°) | 143.646 7 | 143.649 0 | 143.473 4 |
| 终点纬度/(°) | 14.159 2 | 14.162 2 | 13.709 9 |
| S*/km | 139.880 0 | 139.840 0 | 139.900 0 |
| 到达时间偏差/s | 0.5 | 0.5 | 1.0 |

图11
3枚飞行器航程-高度飞行剖面(对比方法)"

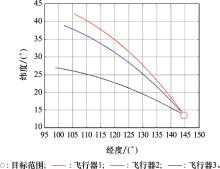
图12
3枚飞行器经纬度轨迹(对比方法)"


图13
3枚飞行器过程约束随时间变化(对比方法)"


图14
3枚飞行器攻角随时间变化(对比方法)"


图15
3枚飞行器倾侧角随时间变化"


图16
3枚飞行器弹道倾角随时间变化"


图17
PID控制的3枚飞行器航程-高度剖面"


图18
PID控制的3枚飞行器过程约束随时间变化"
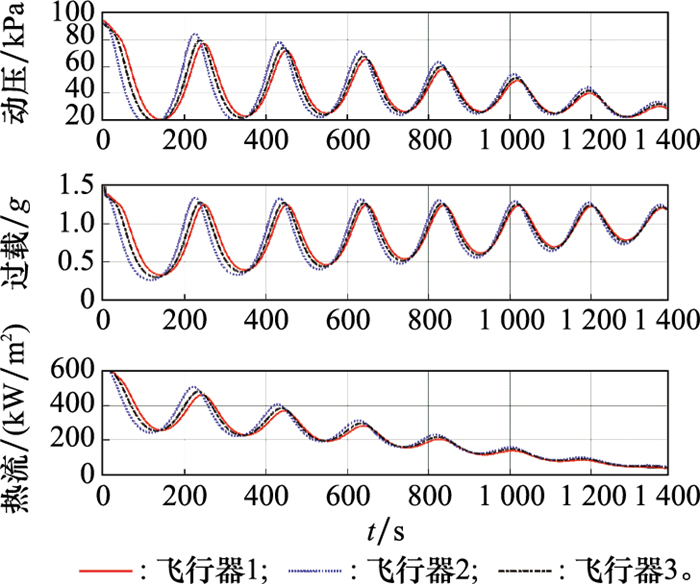

图19
PID控制的3枚飞行器倾侧角随时间变化"
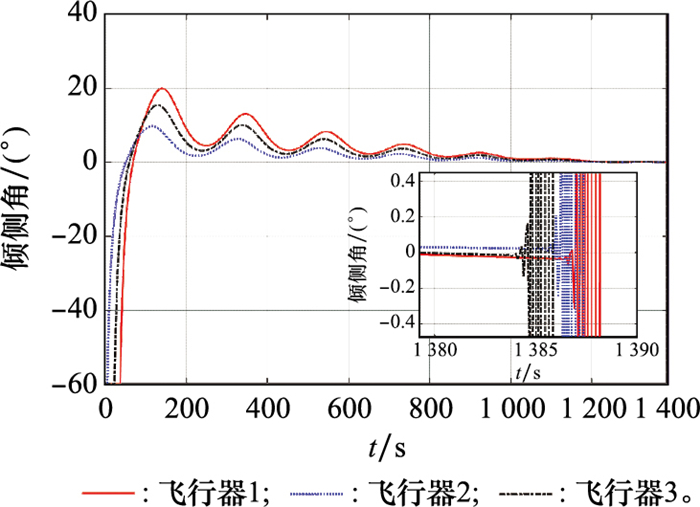
表5
初始偏差和外界扰动"
| 偏差因素 | 取值 |
| 初始经度/(°) | 0.01 |
| 初始纬度/(°) | 0.01 |
| 阻力系数/% | 3 |
| 升力系数/% | 1 |
| 大气密度/% | 1 |
| 飞行器质量/kg | 2 |

图20
扰动条件下飞行器3的高度随时间变化"


图21
飞行器到达时间偏差概率密度分布"

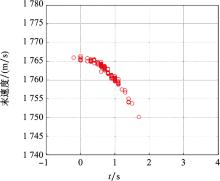
图22
飞行器到达时间偏差对应的末速度"

| 1 |
DING Y B , YUE X K , CHEN G S , et al. Review of control and guidance technology on hypersonic vehicle[J]. Chinese Journal of Aeronautics, 2022, 35 (7): 1- 18.
doi: 10.1016/j.cja.2021.10.037 |
| 2 | WU T C , WANG H L , LIU Y H , et al. Learning-based interfered fluid avoidance guidance for hypersonic reentry vehicles with multiple constraints[J]. ISA Transactions, 2023, 139 (8): 291- 307. |
| 3 |
JIA X , WU S T , WEN Y M , et al. A distributed decision method for missiles autonomous formation based on potential game[J]. Journal of Systems Engineering and Electronics, 2019, 30 (4): 738- 748.
doi: 10.21629/JSEE.2019.04.11 |
| 4 | LIANG Z X , REN Z , LI Q D . Evolved atmospheric entry corridor with safety factor[J]. Acta Astronautica, 2018, 143 (2): 82- 91. |
| 5 | ZHANG D , LIU L , WANG Y J . On-line reentry guidance algorithm with both path and no-fly zone constraints[J]. Acta Astronautica, 2015, 117 (12): 243- 253. |
| 6 | YOU H , CHANG X L , ZHAO J F , et al. Three-dimensional impact-angle-constrained cooperative guidance strategy against maneuvering target[J]. ISA Transactions, 2023, 138 (7): 262- 280. |
| 7 |
ZHAO J , ZHOU R , DONG Z N . Three-dimensional cooperative guidance laws against stationary and maneuvering targets[J]. Chinese Journal of Aeronautics, 2015, 28 (4): 1104- 1120.
doi: 10.1016/j.cja.2015.06.003 |
| 8 | SONG J H , SONG S M , XU S L . Three-dimensional cooperative guidance law for multiple missiles with finite-time convergence[J]. Aerospace Science and Technology, 2017, 67 (8): 193- 205. |
| 9 | WANG X H , LU X . Three-dimensional impact angle constrai-ned distributed guidance law design for cooperative attacks[J]. ISA Transactions, 2018, 73 (2): 79- 90. |
| 10 |
LI J F , ZHOU J X , YAO J F , et al. Experimental observations of communication in blackout, topological waveguiding and Dirac zero-index property in plasma sheath[J]. Nanophotonics, 2023, 12 (10): 1847- 1856.
doi: 10.1515/nanoph-2022-0800 |
| 11 |
LEE J I , JEON I S , TAHK M J . Guidance law to control impact time and angle[J]. IEEE Trans.on Aerospace and Electronic Systems, 2007, 43 (1): 301- 310.
doi: 10.1109/TAES.2007.357135 |
| 12 |
KIM T H , LEE C H , JEON I S , et al. Augmented polynomial guidance with impact time and angle constraints[J]. IEEE Trans.on Aerospace and Electronic Systems, 2013, 49 (4): 2806- 2817.
doi: 10.1109/TAES.2013.6621856 |
| 13 |
JEON I S , LEE J I , TAHK M J . Impact-time-control guidance law for anti-ship missiles[J]. IEEE Trans.on Control Systems Technology, 2006, 14 (2): 260- 266.
doi: 10.1109/TCST.2005.863655 |
| 14 | GUO Y H , LI X , ZHANG H J , et al. Entry guidance with terminal time control based on quasi-equilibrium glide condition[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 56 (2): 887- 896. |
| 15 | LI Z H , HE B , WANG M H , et al. Time-coordination entry guidance for multi-hypersonic vehicles[J]. Aerospace Science and Technology, 2019, 89 (6): 123- 135. |
| 16 | 王肖, 郭杰, 唐胜景, 等. 基于解析剖面的时间协同再入制导[J]. 航空学报, 2019, 40 (3): 239- 250. |
| WANG X , GUO J , TANG S J , et al. Time-cooperative entry guidance based on analytical profile[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (3): 239- 250. | |
| 17 | 周宏宇, 王小刚, 单永志, 等. 基于改进粒子群算法的飞行器协同轨迹规划[J]. 自动化学报, 2022, 48 (11): 2670- 2676. |
| ZHOU H Y , WANG X G , SHAN Y Z , et al. Synergistic path planning for multiple vehicles based on an improved particle swarm optimization method[J]. Acta Automatica Sinica, 2022, 48 (11): 2670- 2676. | |
| 18 | YOU H , CHANG X L , ZHAO J F , et al. Three-dimensional impact-angle-constrained fixed-time cooperative guidance algorithm with adjustable impact time[J]. Aerospace Science and Technology, 2023, 141, 108574. |
| 19 | ZHANG W J , FU S N , LI W , et al. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 168- 184. |
| 20 | ZHAO F J , YOU H . New three-dimensional secondorder sliding mode guidance law with impact-angle constraints[J]. The Aeronautical Journal, 2020, 124 (1273): 368- 384. |
| 21 | 盛永智, 甘佳豪, 张成新. 弹道可调的落角约束分数阶滑模制导律设计[J]. 航空学报, 2023, 44 (7): 182- 195. |
| SHENG Y Z , GAN J H , ZHANG C X . Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (7): 182- 195. | |
| 22 | LI W , WEN Q Q , HE L , et al. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles[J]. Journal of Systems Engineering and Electro-nics, 2021, 32 (2): 447- 459. |
| 23 | LYU T , LI C J , GUO Y N , et al. Three-dimensional finite-time cooperative guidance for multiple missiles without radial velocity measurements[J]. Chinese Journal of Aeronautics, 2019, 32 (5): 1294- 1304. |
| 24 | 王雨辰, 王伟, 林时尧, 等. 考虑攻击时间及空间角度约束的三维自适应滑模协同制导律设计[J]. 兵工学报, 2023, 44 (9): 2778- 2790. |
| WANG Y C , WANG W , LIN S Y , et al. Three-dimensional adaptive sliding mode cooperative guidance law with impact time and angle constraints[J]. Acta Armamentarii, 2023, 44 (9): 2778- 2790. | |
| 25 | BAO C Y , WANG P , TANG G J . Integrated method of gui-dance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34 (5): 535- 553. |
| 26 | SHENG Y Z , ZHANG Z , XIA L . Fractional-order sliding mode control based guidance law with impact angle constraint[J]. Nonlinear Dynamics, 2021, 106 (1): 425- 444. |
| 27 | 姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41 (S1): 171- 183. |
| JIANG P , GUO D , HAN L , et al. Trajectory optimization for cooperative reentry of multiple hypersonic glide vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 171- 183. | |
| 28 | LIANG Z X , LV C , ZHU S . Lateral entry guidance with terminal time constraint[J]. IEEE Trans.on Aerospace and Electronic System, 2023, 59 (3): 2544- 2553. |
| 29 | JEON I S , LEE J I , TAHK M J . Homing guidance law for cooperative attack of multiple missiles[J]. Journal of Guidance, Control, and Dynamics, 2010, 33 (1): 275- 280. |
| 30 | CHO D , KIM H J , TAHK M J . Nonsingular sliding mode guidance for impact time control[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (1): 61- 68. |
| 31 | 徐慧, 蔡光斌, 崔亚龙, 等. 高超声速滑翔飞行器再入轨迹优化[J]. 哈尔滨工业大学学报, 2023, 55 (4): 44- 55. |
| XU H , CAI G B , CUI Y L , et al. Reentry trajectory optimization method of hypersonic glide vehicle[J]. Journal of Harbin Institute of Technology, 2023, 55 (4): 44- 55. |
| [1] | 刘学浩, 刘文学, 杨超三, 祝文晶, 宋玉, 李金海. 基于GPR模型的用户量预测优化方法[J]. 系统工程与电子技术, 2024, 46(8): 2721-2729. |
| [2] | 张文稳, 张成, 郑晨明, 程润北, 陈天乐. 基于载机视觉信息的改进视线制导律设计[J]. 系统工程与电子技术, 2024, 46(8): 2779-2788. |
| [3] | 严平, 李超畅. 尾翼控制小型超空泡航行体运动稳定性分析[J]. 系统工程与电子技术, 2024, 46(7): 2456-2464. |
| [4] | 赵新运, 于剑桥. 新型迅捷弹箭多源力组合控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1734-1744. |
| [5] | 卜瑞宇, 王彪, 李宏成, 唐超颖, 朱日楠. 地形跟随中航迹跟踪模型预测控制方案设计[J]. 系统工程与电子技术, 2024, 46(4): 1383-1392. |
| [6] | 郑秋实, 许伟春, 赵明翰, 李乃星, 包旭馨. 可旋转翼式弹道修正组件滚转控制技术研究[J]. 系统工程与电子技术, 2024, 46(4): 1412-1421. |
| [7] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [8] | 孙谷昊, 蔡中泽, 曾庆双. 多智能体编队加权中心点固定时间分布式跟踪控制[J]. 系统工程与电子技术, 2024, 46(12): 4165-4172. |
| [9] | 张亮, 刘思, 赵康伟, 胡存明. 运载火箭自适应增广控制参数设计及稳定性裕度分析[J]. 系统工程与电子技术, 2024, 46(1): 271-279. |
| [10] | 郑多, 韩煜, 鲁天宇, 初治辰. 考虑避碰与任务分配的多飞行器协同制导技术[J]. 系统工程与电子技术, 2023, 45(9): 2873-2883. |
| [11] | 姜雨石, 陈旸, 高路, 蔡李根, 吕吉星. 重型运载火箭预设时间自适应控制[J]. 系统工程与电子技术, 2023, 45(8): 2570-2577. |
| [12] | 游骏, 张科, 韩治国, 蔡天星, 张程. 带视线角约束的三维超螺旋滑模协同制导律[J]. 系统工程与电子技术, 2023, 45(7): 2138-2149. |
| [13] | 陈旭, 肖瑶, 杨凌宇, 张晶. 基于简化模型的天线罩寄生回路稳定性分析[J]. 系统工程与电子技术, 2023, 45(6): 1784-1796. |
| [14] | 陆浩然, 郑伟, 常晓华. 基于鲁棒精确微分器的分数阶滑模制导律设计[J]. 系统工程与电子技术, 2023, 45(1): 175-183. |
| [15] | 罗世彬, 李晓栋, 王忠森, 徐骋. 并联式运载器上升段广义超螺旋有限时间控制[J]. 系统工程与电子技术, 2022, 44(5): 1626-1635. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||