
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (6): 1899-1908.doi: 10.12305/j.issn.1001-506X.2025.06.18
隋东, 崔晓冰, 周泽凯
收稿日期:2024-01-17
出版日期:2025-06-25
发布日期:2025-07-09
通讯作者:
崔晓冰
作者简介:隋东(1971—), 男, 副教授, 硕士研究生导师, 博士, 主要研究方向为空域规划与安全性分析基金资助:Dong SUI, Xiaobing CUI, Zekai ZHOU
Received:2024-01-17
Online:2025-06-25
Published:2025-07-09
Contact:
Xiaobing CUI
摘要:
空中交通流量的持续增长导致航路拥堵和空域资源紧张。为缓解空中管制员的工作压力, 提高空域的使用效率, 基于自由航路空域的背景, 提出无冲突轨迹规划的方法。建立一个多目标混合整数线性规划模型, 该模型的核心是生成飞行高度剖面满足离域协议高度, 并为冲突航空器找到最近、最优的中间改航点。将空域离散化为菱形, 以固定航向调整幅度并提高模型计算速度, 使用分层序列法求解多目标问题。以真实的空域结构和高于当前运行态势的交通流量, 生成具有连续交通流的场景样本。实验结果表明, 94.625%的样本可以在120 s内得到无冲突轨迹, 所提无冲突轨迹规划方法对于未来自由航路空域发展具有重要意义。
中图分类号:
隋东, 崔晓冰, 周泽凯. 自由航路空域航空器无冲突轨迹规划[J]. 系统工程与电子技术, 2025, 47(6): 1899-1908.
Dong SUI, Xiaobing CUI, Zekai ZHOU. Conflict-free trajectory planning for aircraft in free route airspace[J]. Systems Engineering and Electronics, 2025, 47(6): 1899-1908.
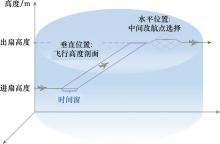
图1
无冲突轨迹规划框架"
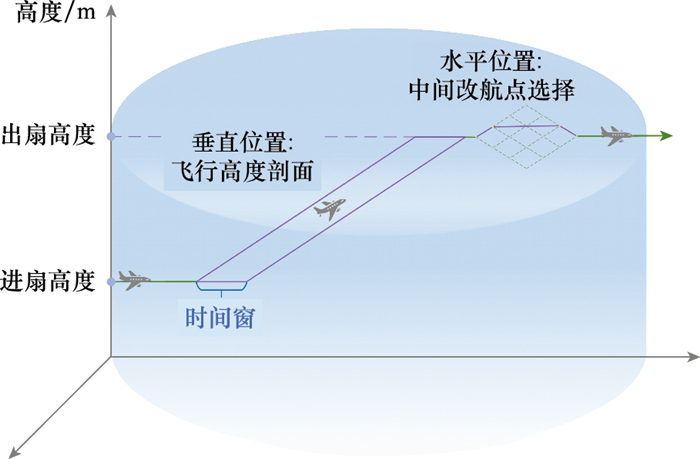
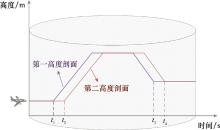
图2
航空器飞行高度剖面"
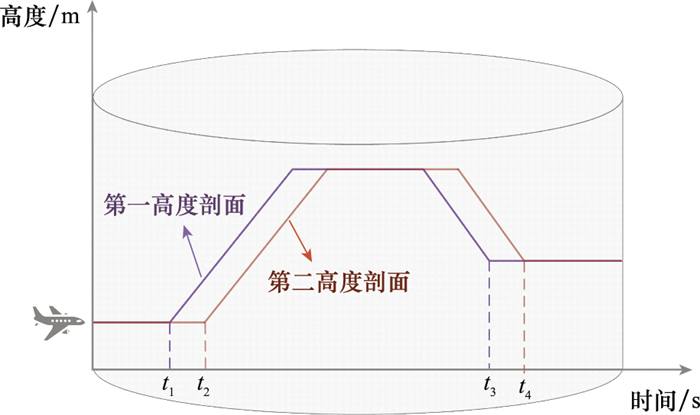
图3
空域离散化方法"

图4
基于时域控制的规划机制"
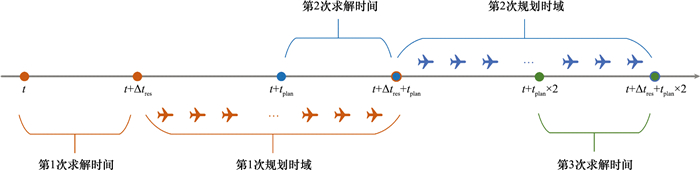
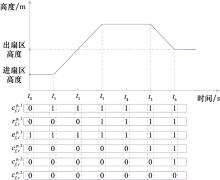
图5
以决策变量表征航空器高度剖面"
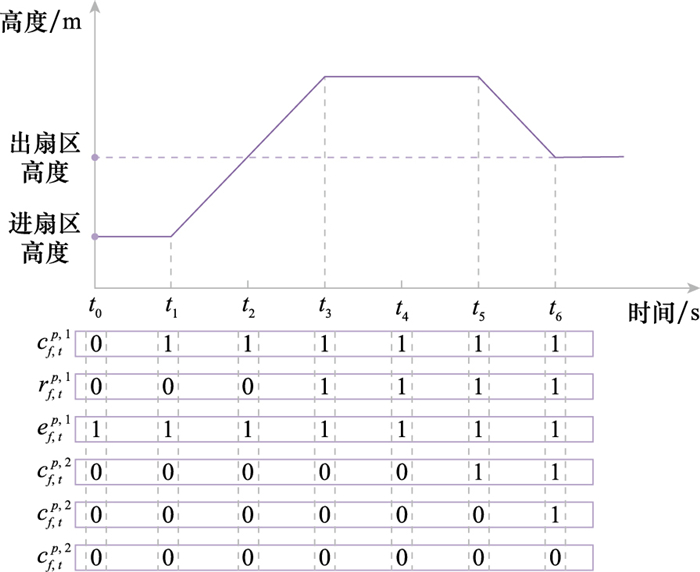
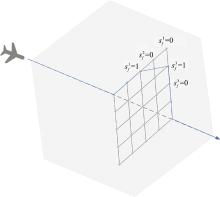
图6
以决策变量表征航空器改航点选择"
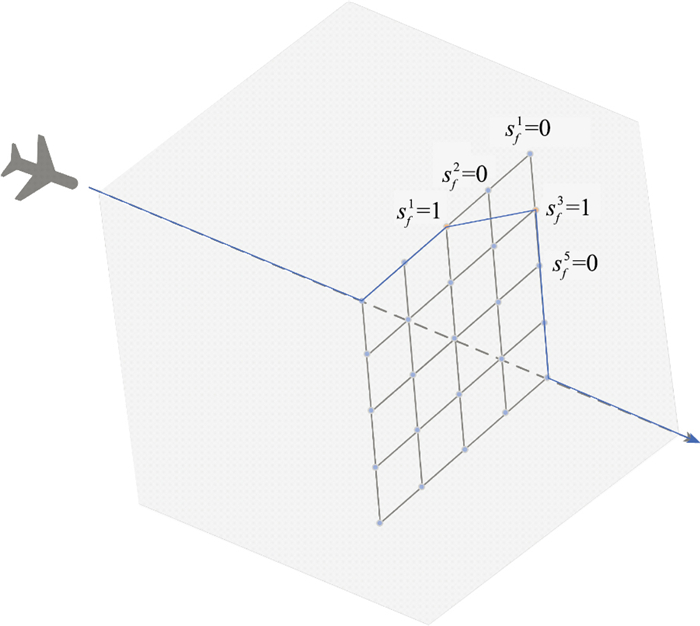
表1
仿真实验参数设置"
| 输入参数 | 输入参数含义 | 取值 |
| Δhmax/m | 航空器每次调高时的最大调高幅度 | 600 |
| tINT/s | 离散化连续时域的时间间隔 | 30 |
| tC∈Z+/s | 相邻两次调高所间隔时间的下限 | 120 |
| tP∈Z+/s | 飞行高度剖面的调高时间窗宽度下限 | 60或120 |
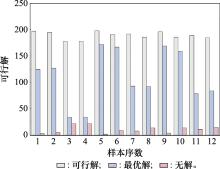
图7
样本求解结果"
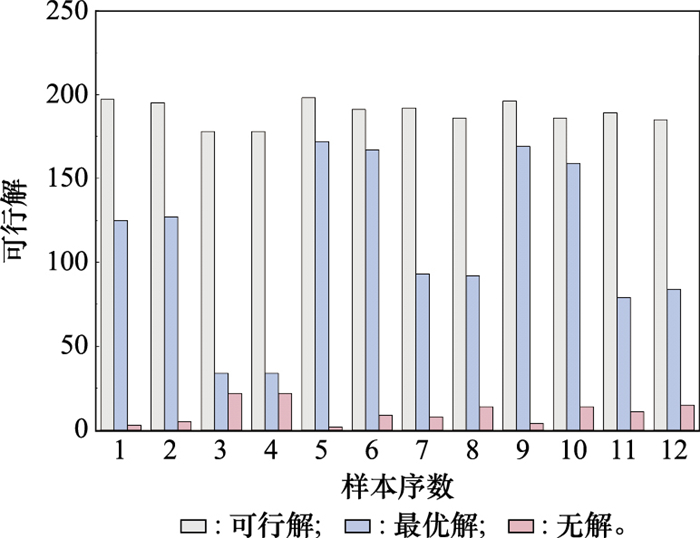
图8
求解时间分布"
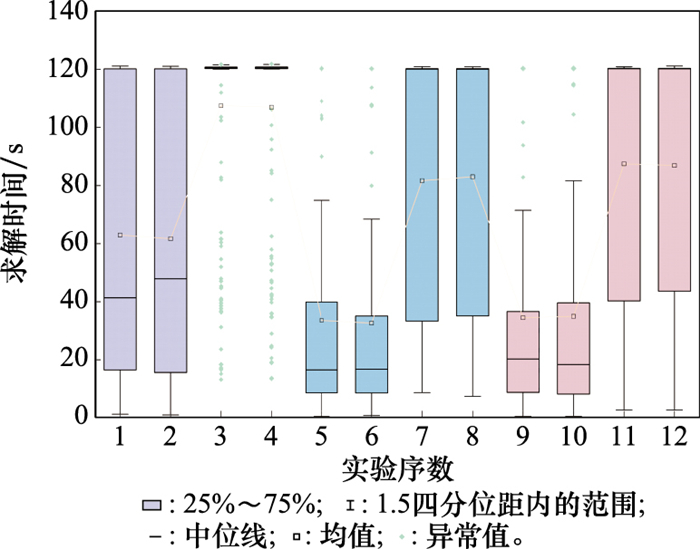
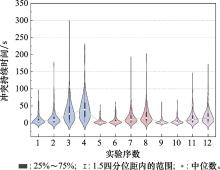
图9
冲突持续时间分布"
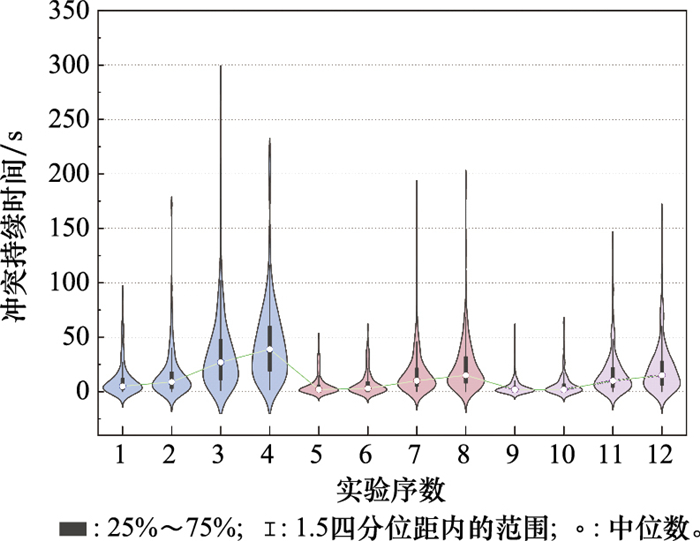
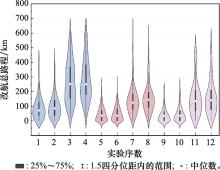
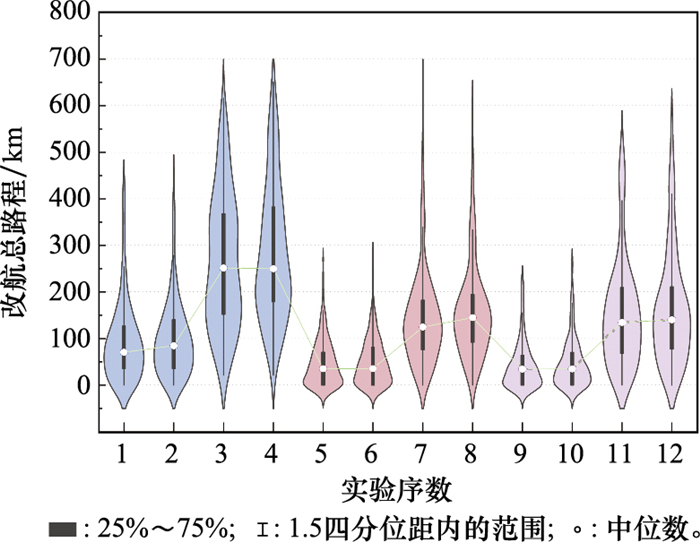
图10
改航总路程分布"
| 1 |
BOLIC T , RAVENHILL P . SESAR: The past, present, and future of European air traffic management research[J]. Engineering, 2021, 7 (4): 448- 451.
doi: 10.1016/j.eng.2020.08.023 |
| 2 | FANTULIN B A , BILJANA J , TOMISLAV R , et al. Free route airspace for efficient air traffic management[J]. Engineering Power, 2020, 15 (2): 10- 17. |
| 3 | 商谢睿. 自由航路空域中的飞行冲突解脱方法研究[D]. 天津: 中国民航大学, 2023. |
| SHANG X R. Research on flight conflict resolution methods in free route airspace[D]. Tianjin: Civil Aviation University of China, 2023. | |
| 4 | 魏路欢. 基于自由航路区的飞行参数智能优化方法研究[D]. 天津: 中国民航大学, 2022. |
| WEI L H. Research on intelligent optimization method of flight parameters based on free route airspace[D]. Tianjin: Civil Avi-ation University of China, 2022. | |
| 5 |
GENCOGLU Y , BASPINAR B . Free routing in high-complexity airspace: impact assessment for environment and aviation stakeholders[J]. Journal of Aerospace Information Systems, 2023, 20 (10): 627- 635.
doi: 10.2514/1.I011203 |
| 6 |
GERDES I , TEMME A , SCHULTZ M . From free-route air traffic to an adapted dynamic mainflow system[J]. Transportation Research Part C: Emerging Technologies, 2020, 115, 102633.
doi: 10.1016/j.trc.2020.102633 |
| 7 |
ZHONG J Y , GOH S K , WOO C J , et al. Impact of spatial orientation ability on air traffic conflict detection in a simulated free route airspace environment[J]. Frontiers in Human Neuroscience, 2022, 16, 739866.
doi: 10.3389/fnhum.2022.739866 |
| 8 | MAJKA A, PASICH A. Cross-border free route airspace concept and its impact on flight efficiency improvement[C]//Proc. of the IOP Conference Series: Materials Science and Engineering, 2022, 1226: 012022. |
| 9 | GAXIOLA C A N , BARRADO C , ROYO P , et al. Assessment of the north European free route airspace deployment[J]. Journal of Air Transport Management, 2018, 73, 113- 119. |
| 10 | DZUBUR D, CAUSEVIC S, MUHIC S, et al. Software simulation for the airspace reconfiguration project in Europe and its impact on Bosnia and Herzegovina airspace[C]//Proc. of the 22nd International Symposium Infoteh-Jahorina (INFOTEH), 2023. |
| 11 | TOMINAGA K, CHAN A K W, SULTANA J, et al. Operational feasibility assessment of the free route airspace concept in the ASEAN region[C]//Proc. of the 26th Air Transportation Research Society Worlel Conference, 2023. |
| 12 |
XU M , HU M H , ZHOU Y , et al. Multi-aircraft cooperative strategic trajectory-planning method considering wind forecast uncertainty[J]. Sustainability, 2022, 14 (17): 10811.
doi: 10.3390/su141710811 |
| 13 |
PEREZ-CASTAN J A , RODRIGUEZ-SANZ A , PEREZ SANZ L , et al. Probabilistic strategic conflict-management for 4D trajectories in free-route airspace[J]. Entropy, 2020, 22 (2): 159.
doi: 10.3390/e22020159 |
| 14 | 韩云祥, 汤新民, 韩松臣. 基于混杂系统理论的无冲突4D航迹预测[J]. 西南交通大学学报, 2012, 47 (6): 1069- 1074. |
| HAN Y X , TANG X M , HAN S C . Conflict-free 4D trajectory prediction based on hybrid system theory[J]. Journal of Southwest Jiaotong University, 2012, 47 (6): 1069- 1074. | |
| 15 | CECEN R K , CETEK C . A two-step approach for airborne delay minimization using pretactical conflict resolution in free-route airspace[J]. Journal of Advanced Transportation, 2019, 2019 (1): 4805613. |
| 16 | 魏志强, 商谢睿. 考虑环境影响的自由航路空域无冲突飞行规划[J]. 安全与环境学报, 2023, 23 (9): 3297- 3306. |
| WEI Z Q , SHANG X R . Conflict-free flight planning in free route airspace considering the influence of the environment[J]. Journal of Safety and Environment, 2023, 23 (9): 3297- 3306. | |
| 17 | CHEN Y T , HU M H , YANG L . Autonomous planning of optimal four-dimensional trajectory for realtime enroute airspace operation with solution space visualisation[J]. Transpor-tation Research Part C: Emerging Technologies, 2022, 140, 103701. |
| 18 | 魏志强, 魏路欢. 基于排放影响的自由航路空域中飞行路线优化[J]. 安全与环境学报, 2022, 22 (4): 2140- 2146. |
| WEI Z Q , WEI L H . Flight route optimization in free route airspace based on emission impact[J]. Journal of Safety and Environment, 2022, 22 (4): 2140- 2146. | |
| 19 | ZHOU Y, WANG Y C, YANG L, et al. Autonomous and cooperative trajectory planning based on traffic complexity awareness[C]//Proc. of the Integrated Communication, Navigation and Surveillance Conference, 2022. |
| 20 | HUANG J, HU M H, YANG L, et al. Dynamic and cooperative optimization of entry and exit points for multiple sectors in free route airspace considering wind forecasts[C]//Proc. of the Integrated Communication, Navigation and Surveillance Conference, 2023. |
| 21 | 张思远, 李仙颖, 沈笑云. 基于ADSB IN的冲突预测与多机无冲突航迹规划[J]. 系统仿真学报, 2019, 31 (8): 1627- 1635. |
| ZHANG S Y , LI X Y , SHEN X Y . Conflict prediction and multi-aircraft conflict-free trajectory planning based on ADSB IN[J]. Journal of System Simulation, 2019, 31 (8): 1627- 1635. | |
| 22 | ZHOU H, HU X B. A ripple spreading algorithm for freeflight route optimization in dynamical airspace[C]//Proc. of the IEEE Symposium Series on Computational Intelligence, 2020: 281-288. |
| 23 | 魏路欢, 陈创希, 周兴, 等. 自由航路空域的出入口位置布局优化[J]. 西华大学学报(自然科学版), 2021, 40 (6): 32- 38. |
| WEI L H , CHEN C X , ZHOU X , et al. Optimization of entry and exit point layout in free route airspace[J]. Journal of Xihua University (Natural Science Edition), 2021, 40 (6): 32- 38. | |
| 24 | DRUPKA G , MAJKA A , ROGALSKI T , et al. An airspace model aplicable for automatic flight route planning inside free route airspace[J]. Advances in Mechanical and Materials Engineering, 2018, 35, 5- 18. |
| 25 | WHITE D . Global grids from recursive diamond subdivisions of the surface of an octahedron or icosahedron[J]. Environmental Monitoring and Assessment, 2000, 64 (1): 93- 103. |
| 26 | 赵学胜, 王磊, 王洪彬, 等. 全球离散格网的建模方法及基本问题[J]. 地理与地理信息科学, 2012, 28 (1): 29- 34. |
| ZHAO X S , WANG L , WANG H B , et al. Modeling method and fundamental issues of global discrete grid[J]. Geography and Geoinformation Science, 2012, 28 (1): 29- 34. | |
| 27 | 马云飞. 横轴墨卡托投影与斜轴墨卡托投影变形差异——以新西兰为例[J]. 测绘与空间地理信息, 2019, 42 (7): 190- 193. |
| MA Y F . Deformation differences between transverse mercator projection and oblique mercator projection: a case study of New Zealand[J]. Geomatics & Spatial Information Technology, 2019, 42 (7): 190- 193. | |
| 28 | CCAR-93TM-R5. 民用航空空中交通管理规则[S]. 北京: 中国民用航空局, 2017. |
| CCAR-93TM-R5. Civil aviation air traffic management regula-tions[S]. Beijing: Civil Aviation Administration of China, 2017. | |
| 29 | 谭昌柏, 袁军, 周来水. 基于宽容分层序列法的飞机装配公差稳健设计技术[J]. 中国机械工程, 2012, 23 (24): 2962- 2967. |
| TAN C B , YUAN J , ZHOU L S . Aircraft assembly tolerance robust design technology based on permissive layered sequence method[J]. China Mechanical Engineering, 2012, 23 (24): 2962- 2967. | |
| 30 | Eurocontrol Experimental Centre. User manual for the base of aircraft data (BADA) revision 3.10[EB/OL]. [2024-01-17]. http://maartenuijtdehaag.com/bada310-User-manual.pdf. |
| [1] | 王彩云, 贾一帆, 李晓飞, 王佳宁, 吴钇达. 基于改进鲸鱼算法和BiGRU的弹道目标HRRP识别方法[J]. 系统工程与电子技术, 2025, 47(6): 1824-1832. |
| [2] | 符小卫, 王辛夷, 乔哲. 基于ASDDPG算法的多无人机对抗策略[J]. 系统工程与电子技术, 2025, 47(6): 1867-1879. |
| [3] | 熊威, 张栋, 任智, 杨书恒. 面向有人/无人机协同打击的智能决策方法研究[J]. 系统工程与电子技术, 2025, 47(4): 1285-1299. |
| [4] | 沈夏闰, 李若楠, 张昊田. 基于CVAE-LSTM的服务器KPI异常检测[J]. 系统工程与电子技术, 2025, 47(3): 1019-1027. |
| [5] | 高晓光, 闫栩辰, 王紫东, 刘晓寒, 冯奇. 基于评分缓存的节点序空间下BN结构学习[J]. 系统工程与电子技术, 2024, 46(12): 4091-4107. |
| [6] | 唐恒, 孙伟, 吕磊, 贺若飞, 吴建军, 孙昌浩, 孙田野. 融合动态奖励策略的无人机编队路径规划方法[J]. 系统工程与电子技术, 2024, 46(10): 3506-3518. |
| [7] | 郑雨晴, 艾小锋, 徐志明, 赵锋, 肖顺平, 杨勇. 基于GNSS的前向散射雷达网目标穿越特性研究[J]. 系统工程与电子技术, 2024, 46(8): 2600-2614. |
| [8] | 王阳阳, 高晓光, 茹鑫鑫. 高维数据局部贝叶斯网络结构学习[J]. 系统工程与电子技术, 2024, 46(8): 2676-2685. |
| [9] | 汪强龙, 高晓光, 吴必聪, 胡子剑, 万开方. 受限玻尔兹曼机及其变体研究综述[J]. 系统工程与电子技术, 2024, 46(7): 2323-2345. |
| [10] | 彭莉莎, 孙宇祥, 薛宇凡, 周献中. 融合三支多属性决策与SAC的兵棋推演智能决策技术[J]. 系统工程与电子技术, 2024, 46(7): 2310-2322. |
| [11] | 蔡一鸣, 马力, 陆恒杨, 方伟. 基于全流程并行遗传算法的贝叶斯网络结构学习[J]. 系统工程与电子技术, 2024, 46(5): 1703-1711. |
| [12] | 刘绍华, 杜康, 佘春东, 杨傲. 基于CenterNet的多教师联合知识蒸馏[J]. 系统工程与电子技术, 2024, 46(4): 1174-1184. |
| [13] | 郑丽莎, 尹东亮, 王旋. 基于改进D-S证据理论的相控阵雷达作战效能评估[J]. 系统工程与电子技术, 2024, 46(4): 1330-1336. |
| [14] | 隆雨佟, 陈爱国, 史红权, 曾黎. 基于改进差分进化算法的跨平台武器目标分配方法[J]. 系统工程与电子技术, 2024, 46(3): 953-962. |
| [15] | 栾瑞鹏, 张静, 刘立坤. 面向装备试验鉴定领域数据治理的知识图谱本体构建[J]. 系统工程与电子技术, 2024, 46(3): 1013-1020. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||