
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (4): 1300-1310.doi: 10.12305/j.issn.1001-506X.2025.04.26
奔粤阳, 黄原, 黄鸿殿, 李倩
收稿日期:2024-03-29
出版日期:2025-04-25
发布日期:2025-05-28
通讯作者:
李倩
作者简介:奔粤阳 (1981—), 男, 教授, 博士, 主要研究方向为导航、制导与控制基金资助:Yueyang BEN, Yuan HUANG, Hongdian HUANG, Qian LI
Received:2024-03-29
Online:2025-04-25
Published:2025-05-28
Contact:
Qian LI
摘要:
针对室内复杂应用场景下行人定位精度低的问题, 提出一种基于惯性导航系统/超宽带(inertial navigation system/ultra-wide band, INS/UWB)紧组合定位方法。以脚部运动的一个步态周期为基本搜索单元, 通过行人脚部运动分析, 利用z轴角速度信息实现行人复合运动下的精确零速检测, 进一步利用零速校正(zero velocity update, ZUPT)抑制惯性解算累积误差。同时, 考虑UWB测距精度受非视距(non-line-of-sight, NLOS)影响问题, 利用反向传播神经网络自适应学习方法建立NLOS误差模型并据此对UWB测距误差进行补偿。实验结果表明, 在室内复杂应用场景下,所提INS/UWB紧组合算法定位误差为0.19 m, 相比未进行ZUPT和NLOS误差补偿的INS/UWB紧组合定位方法,定位精度提高84.6%。
中图分类号:
奔粤阳, 黄原, 黄鸿殿, 李倩. 基于INS/UWB紧组合的行人室内定位方法[J]. 系统工程与电子技术, 2025, 47(4): 1300-1310.
Yueyang BEN, Yuan HUANG, Hongdian HUANG, Qian LI. Pedestrian indoor positioning method based on INS/UWB tight integration[J]. Systems Engineering and Electronics, 2025, 47(4): 1300-1310.
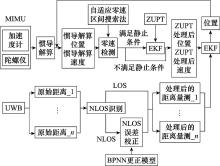
图1
INS/UWB紧组合定位算法框架"
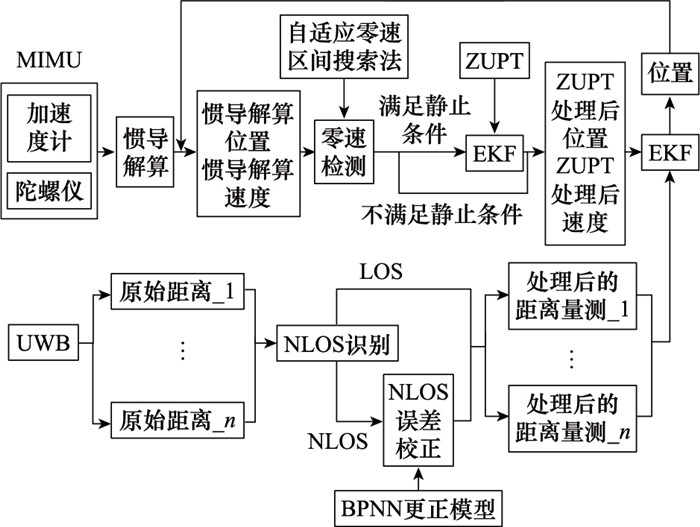
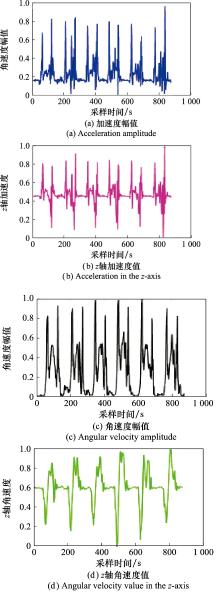
图2
脚部数据分布趋势对比"
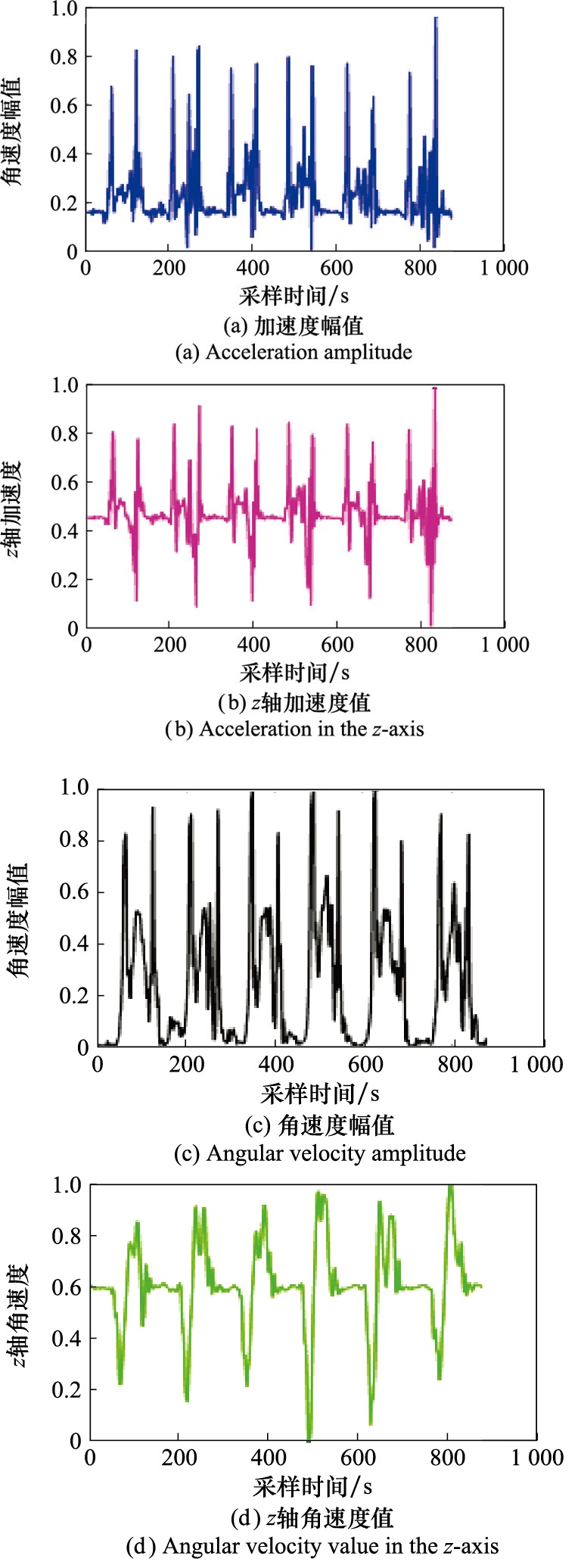
图3
基本搜索单元确定"
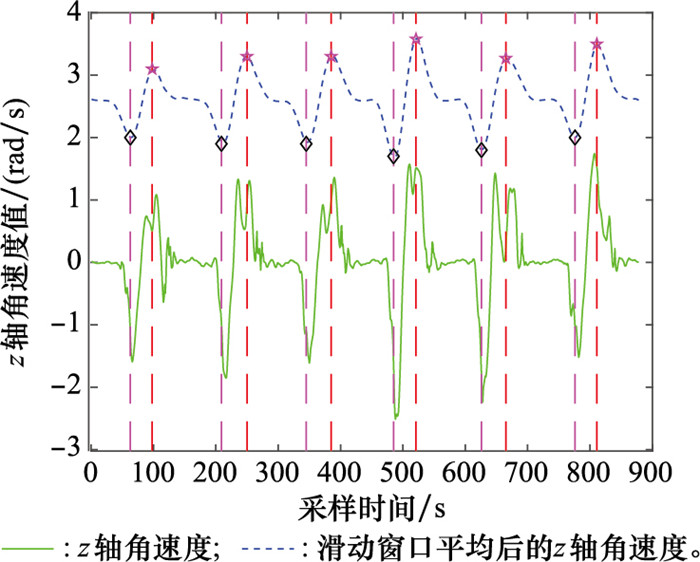
图4
零角速度区间点确定"
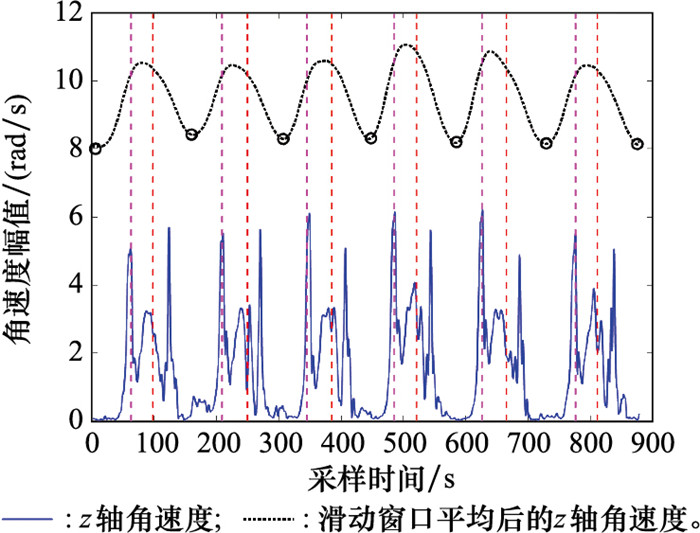
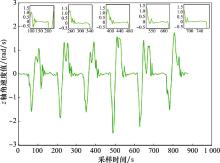
图5
零角速度区间始端搜索"
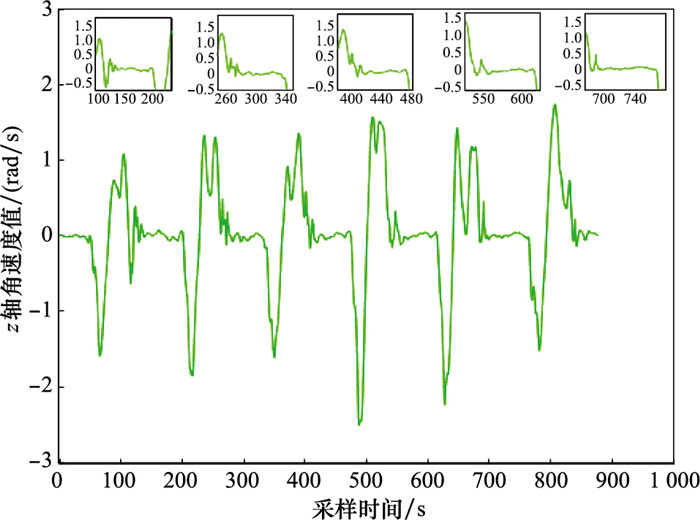
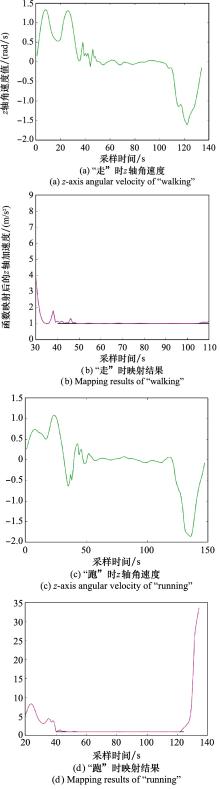
图6
“走”和“跑”情况下的z轴角速度分布"
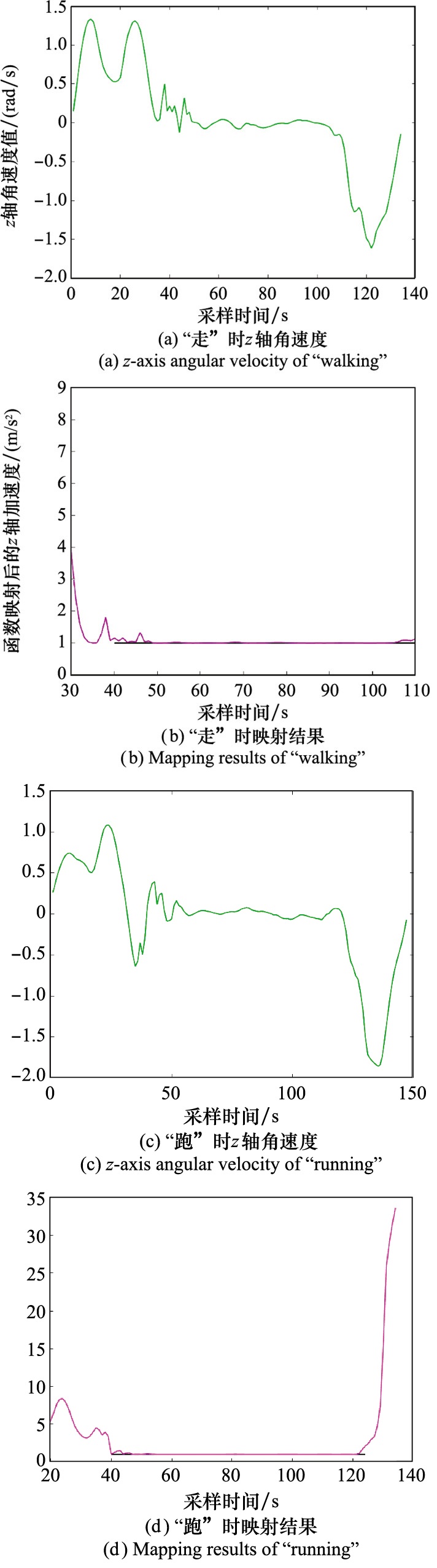
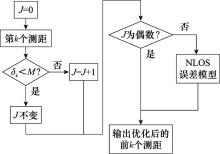
图7
UWB测距误差补偿流程"
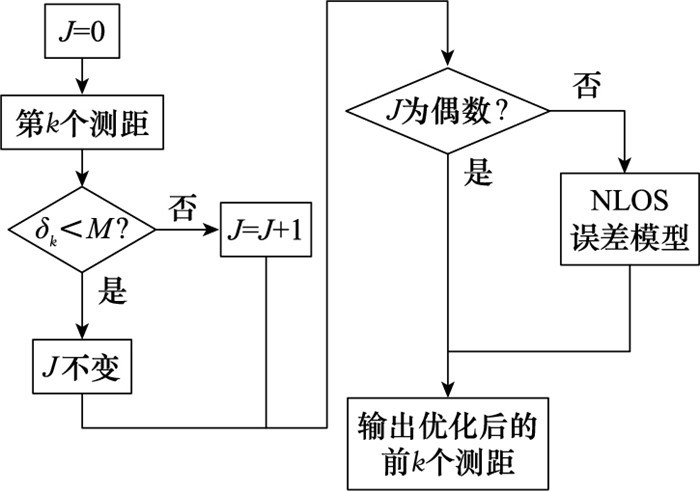

图8
BPNN测距误差模型"
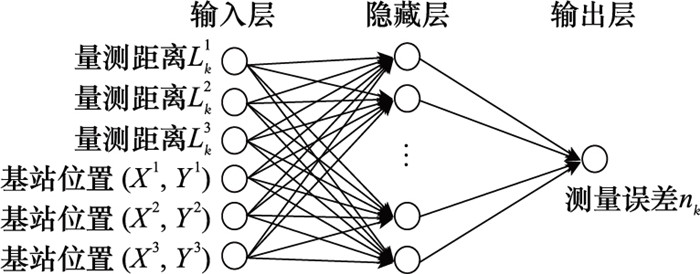

图9
实验场地"

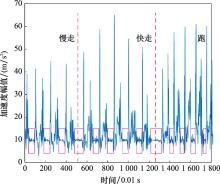
图10
自适应零速区间搜索结果(直线走位)"
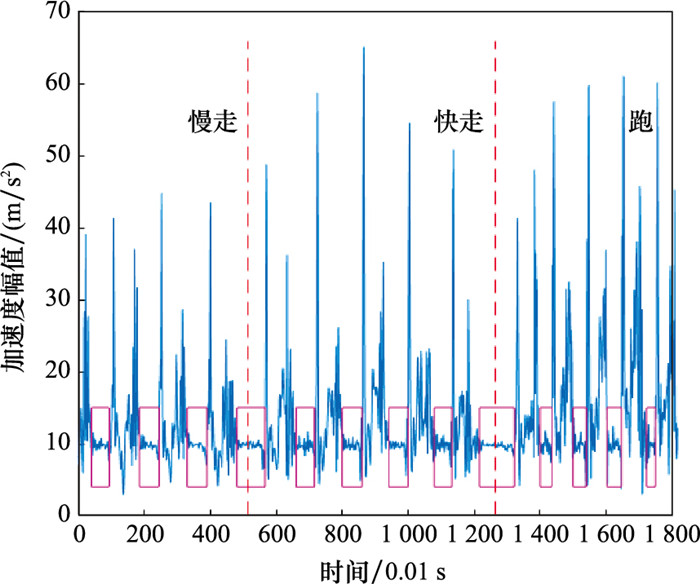

图11
室内行人轨迹(直线走位)"
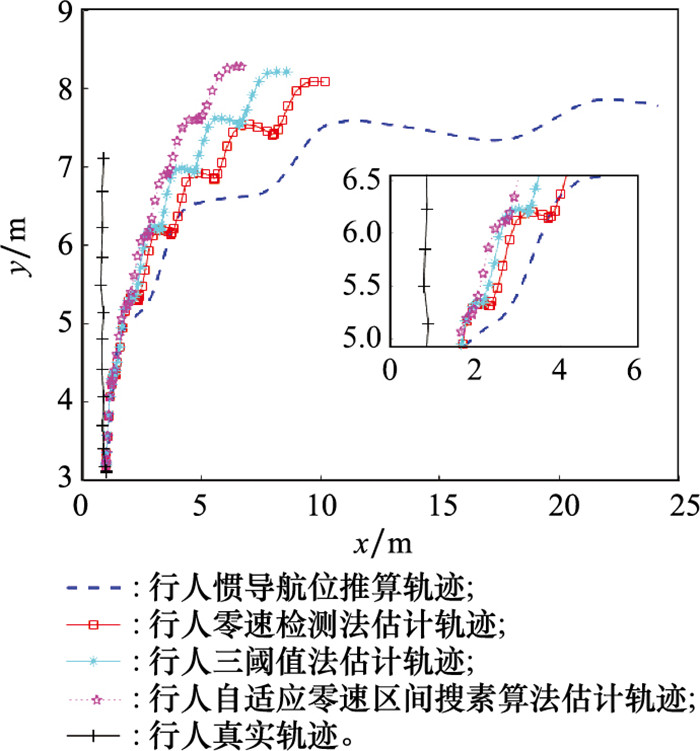
表1
零速区间搜索对比结果(直线走位)"
| 检测器 | 零速数量/帧 | 终点误差/m |
| 无 | 0 | 23.970 |
| 三阈值法 | 438 | 7.863 |
| 零速检测法 | 589 | 9.642 |
| 自适应零速区间搜索算法 | 657 | 4.851 |
图12
室内行人轨迹(方形走位)"
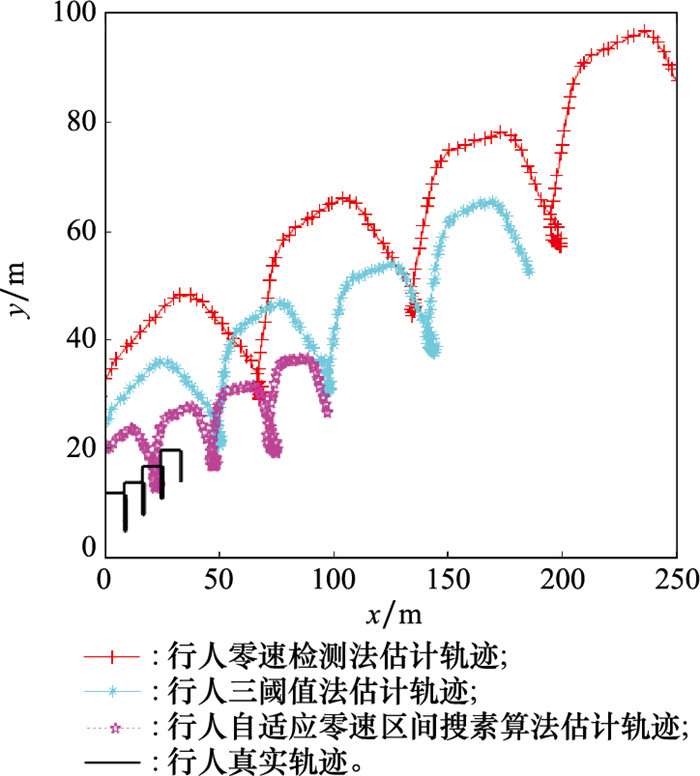
表2
零速区间搜索对比结果(方形走位)"
| 检测器 | 零速数量/帧 | 终点误差/m |
| 无 | 0 | 48 575 |
| 三阈值法 | 9 936 | 270.412 |
| 零速检测法 | 6 892 | 192.108 |
| 自适应零速区间搜索算法 | 14 860 | 100.606 |
表3
自适应零速区间搜索匹配度(直线走位)"
| 检测器 | 相同零速数量/帧 | 匹配度/% |
| 三阈值法 | 400 | 91.324 |
| 零速检测法 | 559 | 94.907 |
表4
自适应零速区间搜索匹配度(方形走位)"
| 检测器 | 相同零速数量/帧 | 匹配度/% |
| 三阈值法 | 9 936 | 90.58 |
| 零速检测法 | 6 892 | 94.31 |
表5
测试样本点的数据统计表"
| 样本 | 点位测量数据 | BPNN预测 | ||||
| 真实距离/m | 测量距离/m | 更正前绝对误差/m | 更正后测量距离/m | 更正后绝对误差/m | ||
| A1 | 4.30 | 4.53 | 0.23 | 4.29 | 0.01 | |
| A2 | 5.30 | 5.52 | 0.22 | 5.28 | 0.02 | |
| A3 | 4.89 | 5.21 | 0.32 | 4.90 | 0.01 | |
| A4 | 3.50 | 3.68 | 0.18 | 3.53 | 0.03 | |
| A5 | 2.03 | 2.39 | 0.36 | 2.01 | 0.02 | |
| A6 | 2.11 | 2.50 | 0.39 | 2.12 | 0.01 | |
| A7 | 1.92 | 2.10 | 0.18 | 1.94 | 0.02 | |
| A8 | 4.05 | 4.28 | 0.23 | 4.08 | 0.03 | |
| A9 | 3.46 | 3.70 | 0.26 | 3.47 | 0.01 | |
| A10 | 2.59 | 2.86 | 0.27 | 2.62 | 0.03 | |
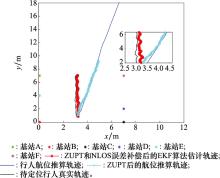
图13
室内复杂场景行人轨迹"
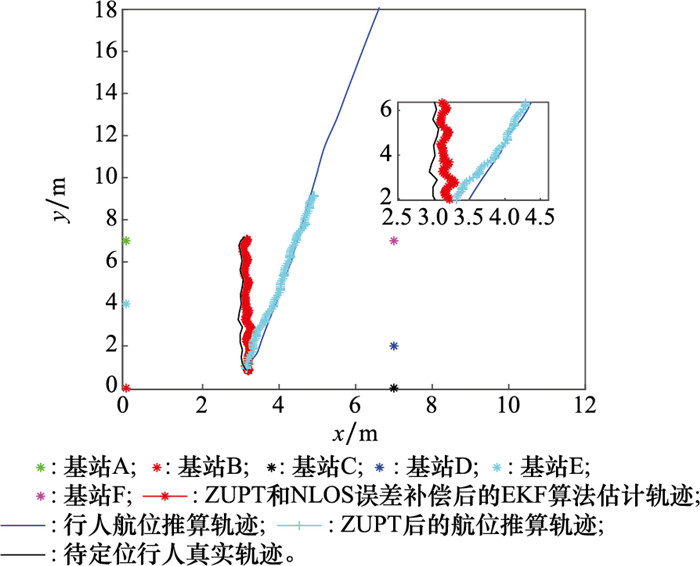
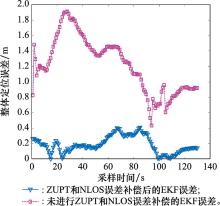
图14
行人定位误差"
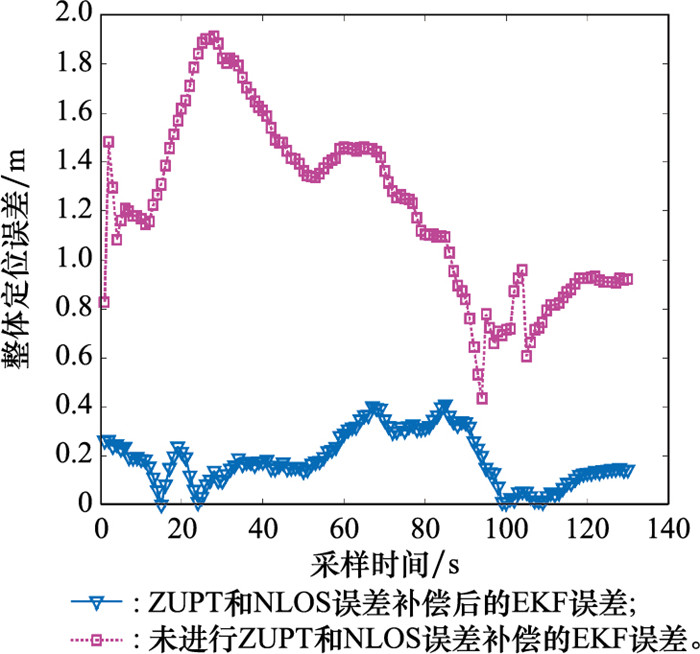
图15
行人定位误差累积分布函数图"
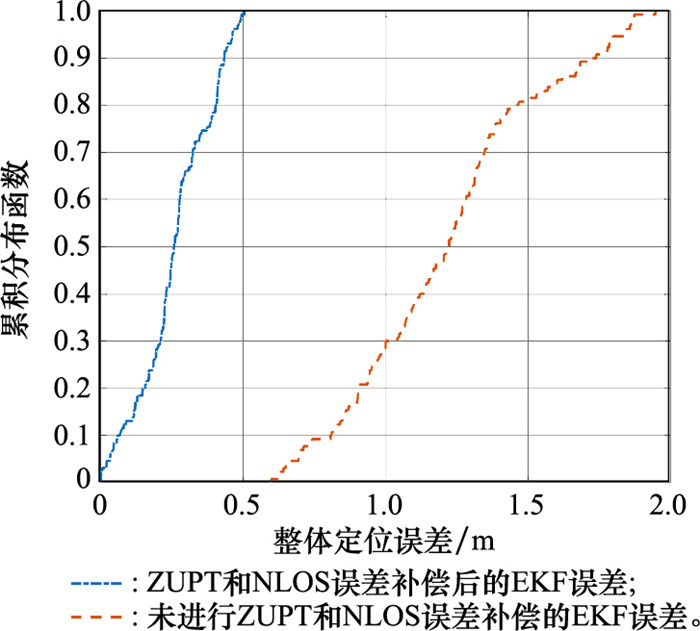
表6
不同算法的运行时间"
| 定位算法 | 运行时间/s |
| 行人航位推算 | 0.779 |
| 基于ZUPT的行人航位推算 | 0.978 |
| ZUPT和NLOS误差补偿后的EKF | 6.115 |
| 1 | ASHRAF I , HUR S , PARK Y . Smartphone sensor based indoor positioning: current status, opportunities, and future cha-llenges[J]. Electronics, 2024, 9 (6): 891. |
| 2 | YU Q. Indoor location methods of fire personnel based on GPS and sensor network[C]//Proc. of the 4th International Conference on Informatics Engineering & Information Science, 2022, 12161: 357-363. |
| 3 | MIAO C W , CHEN G Z , YAN C L , et al. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm[J]. Computers & Industrial Engineering, 2021, 15, 107230. |
| 4 |
HUANG J H , JUNGINGER S , LIU H , et al. Indoor positioning systems of mobile robots: a review[J]. Robotics, 2023, 12 (2): 47.
doi: 10.3390/robotics12020047 |
| 5 |
SESYUK A , IOANNOU S , RASPOPOULOS M . A survey of 3D indoor localization systems and technologies[J]. Sensors, 2022, 22 (23): 9380.
doi: 10.3390/s22239380 |
| 6 | TEYMOURI M S, BHATTACHARYA S. Landmark-based distributed topological mapping and navigation in GPS-denied urban environments using teams of low-cost robots[EB/OL]. [2024-03-01]. https://link.springer.com/article/10.1007/s10458-024-09635-y. |
| 7 |
YAN J , YANG C , FAN W Y , et al. GNSS/UWB integrated positioning with robust Helmert variance component estimation[J]. Advances in Space Research, 2024, 73 (5): 2532- 2547.
doi: 10.1016/j.asr.2023.12.020 |
| 8 | CHIANG K W , CHANG H W , LI Y H , et al. Assessment for INS/GNSS/odometer/barometer integration in loosely-coupled and tightly-coupled scheme in a GNSS-degraded environment[J]. IEEE Sensors Journal, 2019, 20 (6): 3057- 3069. |
| 9 |
ZHOU P , WANG H , GRAVINA R , et al. WIO-EKF: extended Kalman filtering-based Wi-Fi and inertial odometry fusion method for indoor localization[J]. IEEE Internet of Things Journal, 2024, 11 (13): 23592- 23603.
doi: 10.1109/JIOT.2024.3386889 |
| 10 |
JURDI R , CHEN H , ZHU Y M , et al. WhereArtThou: a WiFi-RTT-based indoor positioning system[J]. IEEE Access, 2024, 12, 41084- 41101.
doi: 10.1109/ACCESS.2024.3377237 |
| 11 |
NIU J W , WANG B W , SHU L , et al. ZIL: an energy-efficient indoor localization system using ZigBee radio to detect WiFi fingerprints[J]. IEEE Journal on Selected Areas in Communications, 2015, 33 (7): 1431- 1442.
doi: 10.1109/JSAC.2015.2430171 |
| 12 |
GUO G Y , CHEN R Z , YAN K , et al. Multi-channel and multi-RSS based BLE range estimation for indoor tracking of commercial smartphones[J]. IEEE Sensors Journal, 2023, 23 (24): 30728- 30738.
doi: 10.1109/JSEN.2023.3328711 |
| 13 | XU S H , CHEN R Z , GUO G Y , et al. Bluetooth, floor-plan, and microelectromechanical systems-assisted wide-area audio indoor localization system: apply to smartphones[J]. IEEE Trans.on Industrial Electronics, 2021, 69 (11): 11744- 11754. |
| 14 |
FAN Q G , SUN B W , AN S , et al. Performance enhancement of MEMS-based INS/UWB integration for indoor navigation applications[J]. IEEE Sensors Journal, 2017, 17 (10): 3116- 3130.
doi: 10.1109/JSEN.2017.2689802 |
| 15 |
LI M G , ZHU H , YOU S Z , et al. UWB-based localization system aided with inertial sensor for underground coal mine applications[J]. IEEE Sensors Journal, 2020, 20 (12): 6652- 6669.
doi: 10.1109/JSEN.2020.2976097 |
| 16 |
DE-COCK C , TANGHE E , JOSEPH W , et al. Robust IMU-based mitigation of human body shadowing in UWB indoor positioning[J]. Sensors, 2023, 23 (19): 8289.
doi: 10.3390/s23198289 |
| 17 | LIU A, LIN S W, WANG J G, et al. A method for non-line of sight identification and delay correction for UWB indoor positioning[C]//Proc. of the IEEE 17th Conference on Industrial Electronics and Applications, 2022: 9-14. |
| 18 | 李倩, 蒋正华, 孙炎, 等. 基于因子图的INS/UWB室内行人紧组合定位技术[J]. 仪器仪表学报, 2022, 43 (5): 32- 45. |
| LI Q , JIANG Z H , SUN Y , et al. INS/UWB tight integrated localization technology for pedestrian indoor based on factor graph[J]. Chinese Journal of Scientific Instrument, 2022, 43 (5): 32- 45. | |
| 19 | NAHEEM K , KIM M S . A robust indoor pedestrian localization approach against human body shadowing for UWB-enabled smartphones[J]. IEEE Trans.on Instrumentation and Mea-surement, 2024, 73, 9505013. |
| 20 |
ZHANG H , WANG Q , LI Z H , et al. Research on high precision positioning method for pedestrians in indoor complex environments based on UWB/IMU[J]. Remote Sensing, 2023, 15 (14): 3555.
doi: 10.3390/rs15143555 |
| 21 | ZHU J , KIA S S . Decentralized cooperative localization with LOS and NLOS UWB inter-agent ranging[J]. IEEE Sensors Journal, 2021, 22 (6): 5447- 5456. |
| 22 |
LI Z , DENG Z H , MENG Z D , et al. Coriolis-based heading estimation for pedestrian inertial localization based on MEMS MIMU[J]. IEEE Internet of Things Journal, 2024, 11 (16): 27509- 27517.
doi: 10.1109/JIOT.2024.3398431 |
| 23 | GUO H M, URADZINSKI M. The usability of MTI IMU sensor data in PDR indoor positioning[C]//Proc. of the IEEE 25th International Conference on Integrated Navigation Systems, 2018. |
| 24 |
ELSANHOURY M , MAKELA P , KOLJONEN J , et al. Precision positioning for smart logistics using ultra-wideband technology-based indoor navigation: a review[J]. IEEE Access, 2022, 10, 44413- 44445.
doi: 10.1109/ACCESS.2022.3169267 |
| 25 |
NAHEEM K , KIM M S . A low-cost foot-placed UWB and IMU fusion-based indoor pedestrian tracking system for IoT applications[J]. Sensors, 2022, 22 (21): 8160.
doi: 10.3390/s22218160 |
| 26 |
文张建, 赵立业, 沈翔. GRU-DNN改进的行人导航零速检测方法[J]. 导航定位学报, 2022, 10 (5): 97- 104.
doi: 10.3969/j.issn.2095-4999.2022.05.014 |
|
WEN Z J , ZHAO L Y , SHEN X . An improved zero-velocity detection method of pedestrian navigation based on GRU-DNN[J]. Journal of Navigation and Positioning, 2022, 10 (5): 97- 104.
doi: 10.3969/j.issn.2095-4999.2022.05.014 |
|
| 27 | 陈泽, 潘献飞, 陈昶昊, 等. 一种用于足绑式行人惯性导航的区间搜索零速检测器[J]. 中国惯性技术学报, 2020, 28 (6): 709- 715. |
| CHEN Z , PAN X F , CHEN C H . A zero-velocity detector based on interval search for foot-mounted pedestrian inertial navigation[J]. Journal of Chinese Inertial Technology, 2020, 28 (6): 709- 715. | |
| 28 |
杨海, 李威, 张禾, 等. 复杂坏境下基于SINS/UWB的容错组合定位技术研究[J]. 仪器仪表学报, 2017, 38 (9): 2177- 2185.
doi: 10.3969/j.issn.0254-3087.2017.09.011 |
|
YANG H , LI W , ZHANG H , et al. Fault tolerant integrated positioning system based on SINS/UWB in complex environment[J]. Chinese Journal of Scientific Instrument, 2017, 38 (9): 2177- 2185.
doi: 10.3969/j.issn.0254-3087.2017.09.011 |
|
| 29 |
YUAN S W , ZHANG Y B , SHI Y T , et al. A novel ESKF based ZUPT using midpoint integration approach for indoor pedestrian navigation[J]. IEEE Sensors Journal, 2024, 24 (7): 10920- 10932.
doi: 10.1109/JSEN.2024.3365979 |
| 30 |
WANG Q , FU M X , WANG J Q , et al. Free-walking: pedestrian inertial navigation based on dual foot-mounted IMU[J]. Defence Technology, 2024, 33, 573.
doi: 10.1016/j.dt.2023.03.001 |
| 31 | NILSSON J O, GUPTA A K, HANDEL P. Foot-mounted inertial navigation made easy[C]// Proc. of the IEEE International Conference on Indoor Positioning and Indoor Navigation, 2014: 24-29. |
| 32 | WANG Y, CHERNYSHOFF A, SHKEL A M. Error analysis of ZUPT-aided pedestrian inertial navigation[C]//Proc. of the IEEE International Conference on Indoor Positioning and Indoor Navigation, 2018: 206-212. |
| 33 | WANG J Y , LIU J H , XU X B , et al. A yaw correction method for pedestrian positioning using two low-cost MIMUs[J]. Mea-surement, 2023, 217, 112992. |
| 34 | 刘培原, 王坚, 盛坤鹏, 等. 非视距误差神经网络改正的超宽带定位模型研究[J]. 导航定位与授时, 2020, 7 (3): 93- 104. |
| LIU P Y , WANG J , SHENG K P , et al. Research on UWB positioning model corrected by non-line-of-sight error neural network[J]. Navigation Positioning & Timing, 2020, 7 (3): 93- 104. | |
| 35 | 李得海, 吴文坛, 马会林, 等. 室内测距型基站组网定位性能分析[J]. 武汉大学学报(信息科学版), 2025, 50 (1): 1- 10. |
| LI D H , WU W T , MA H L , et al. Positioning performance of the indoor networks of range-based reference stations[J]. Geomatics and Information Science of Wuhan University, 2025, 50 (1): 1- 10. | |
| 36 | ZHANG X D, REN M R, WANG P, et al. A new zero velocity update algorithm for the shoe-mounted personal navigation system based on IMU[C]//Proc. of the 34th Chinese Control Conference, 2015. |
| [1] | 杨德贵, 许道峰. 基于时频域特征融合的IR-UWB穿墙雷达人体行为识别方法[J]. 系统工程与电子技术, 2024, 46(3): 849-858. |
| [2] | 赵云龙, 孙骞, 简鑫, 李一兵, 于飞. 基于改进EMD-CIIT降噪算法的INS/5G组合导航方法[J]. 系统工程与电子技术, 2024, 46(12): 4203-4212. |
| [3] | 沈子涵, 赵修斌, 张闯, 张良, 刘鑫贤. 基于长短期记忆神经网络的自适应容错方法[J]. 系统工程与电子技术, 2023, 45(3): 831-838. |
| [4] | 高威, 李亚峰, 王可东. 信号级GNSS/SINS超紧组合导航仿真平台设计[J]. 系统工程与电子技术, 2023, 45(1): 184-192. |
| [5] | 陈凯柏, 高敏, 周晓东, 毕军建, 王毅. 毫米波探测器的超宽带耦合特性[J]. 系统工程与电子技术, 2022, 44(12): 3641-3651. |
| [6] | 王岩, 李奕欣, 王昊, 丁振东, 陶诗飞. 基于特征模理论的超宽带单极子天线设计[J]. 系统工程与电子技术, 2021, 43(11): 3078-3085. |
| [7] | 史策, 陈善学, 李方伟. 时间反演UWB通信系统的窄带干扰抑制[J]. 系统工程与电子技术, 2020, 42(4): 948-953. |
| [8] | 陈凯柏, 高敏, 周晓东, 程呈. 调频连续波引信超宽带电磁脉冲前门耦合效应[J]. 系统工程与电子技术, 2020, 42(3): 528-535. |
| [9] | 陈凯柏, 周晓东, 高敏, 范宇清. 毫米波引信射频前端UWB-HPM效应研究[J]. 系统工程与电子技术, 2020, 42(2): 284-291. |
| [10] | 李振亚, 竺小松, 张建华, 刘汉. 新型超宽带圆极化印刷天线[J]. 系统工程与电子技术, 2019, 41(1): 9-13. |
| [11] | 李振亚, 竺小松, 张建华. 具有双陷波特性的小型Vivaldi超宽带天线[J]. 系统工程与电子技术, 2018, 40(9): 1911-1916. |
| [12] | 蒋磊, 陈博文, 张群, 李涛. α稳定分布噪声下基于FHN模型的UWB-IR信号检测[J]. 系统工程与电子技术, 2018, 40(7): 1423-1428. |
| [13] | 廉昕, 王元钦, 侯孝民, 孟祥利. 一种脉冲超宽带测控信号及其性能分析[J]. 系统工程与电子技术, 2016, 38(9): 2179-2183. |
| [14] | 李子月, 张林, 陈善秋, 杨春宁, 马龙华. 捷联惯性/卫星超紧组合导航技术综述与展望[J]. 系统工程与电子技术, 2016, 38(4): 866-874. |
| [15] | 刘帅, 孙付平, 张伦东. 模糊度固定解PPP/INS紧组合模型[J]. 系统工程与电子技术, 2016, 38(10): 2389-2394. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||