Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1287-1296.doi: 10.12305/j.issn.1001-506X.2024.04.17
• Systems Engineering • Previous Articles Next Articles
Robust fault diagnosis for space robot manipulator based on adaptive super-twisting observer
Sheng GAO1,2, Hailong ZHANG3, Wei ZHANG1,2,*, Weiguo KONG1,2
- 1. National State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
2. Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
3. Key Laboratory for Fault Diagnosis and Maintenance of Spacecraft in Orbit, Xi'an 710043, China
-
Received:2023-04-20Online:2024-03-25Published:2024-03-25 -
Contact:Wei ZHANG
CLC Number:
Cite this article
Sheng GAO, Hailong ZHANG, Wei ZHANG, Weiguo KONG. Robust fault diagnosis for space robot manipulator based on adaptive super-twisting observer[J]. Systems Engineering and Electronics, 2024, 46(4): 1287-1296.
share this article

Fig.1
Generalized schematic diagram of actuator in each joint of space robot manipulator"

Table 1
Parameter values of the observer"
| 参数类别 | 参数符号 | 取值 |
| 控制参数 | p | 0.55 |
| ε | 0.10 | |
| β0 | 1.10 | |
| α0 | 2.00 | |
| k | 2.50 | |
| γ | 8.00 | |
| 自适应参数 | ϵ | 0.01 |
| r0 | 0.10 | |
| l0 | 0.10 | |
| a | 0.86 |
Table 2
Physical parameters of the asteroid sampling space three-link robot manipulator"
| 参数 | 数值 | 参数 | 数值 | |
| m1/kg | 1.24 | l1/m | 1.0 | |
| m2/kg | 0.92 | l2/m | 1.0 | |
| m3/kg | 0.50 | l3/m | 0.4 |

Fig.2
State estimation error of adaptive super-twisting observer"


Fig.3
State estimation error of Edwards observer"
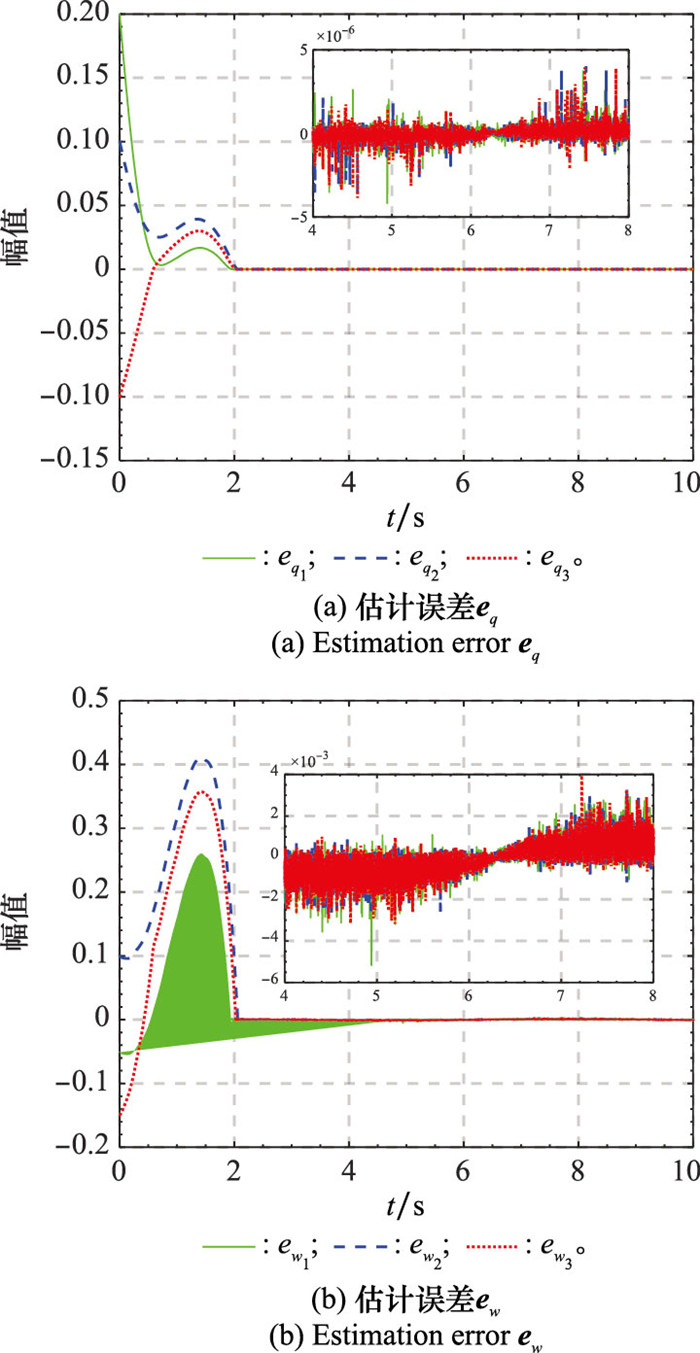
Table 3
Comparison results of observers performance"
| 参数 | 本文观测器 | Edwards观测器[ |
| eq的稳态精度/rad | 4×10-6 | 5×10-6 |
| ew的稳态精度/(rad/s) | 5×10-3 | 5×10-3 |
| 稳态时间/s | 0.22 | 2.05 |
| ew的瞬态峰值绝对值/(rad/s) | 0.99 | 0.41 |

Fig.4
Result of actuator fault diagnosis"

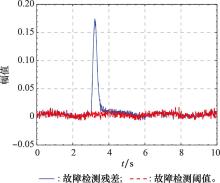
Fig.5
Result of actuator fault diagnosis (measurement noise)"


Fig.6
Comparision of actuator fault diagnosis results (0-10 s)"


Fig.7
Comparision of actuator fault diagnosis results (3-7 s)"

| 1 | 薛智慧, 刘金国. 空间机械臂操控技术研究综述[J]. 机器人, 2022, 44 (1): 107- 128. |
| XUE Z H , LIU J G . Review of space manipulator control technologies[J]. Robot, 2022, 44 (1): 107- 128. | |
| 2 | 姜斌, 张柯, 杨浩, 等. 卫星姿态控制系统容错控制综述[J]. 航空学报, 2021, 42 (10): 59- 72. |
| JIANG B , ZHANG K , YANG H , et al. A review of fault-tole-rant control of satellite attitude control systems[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (10): 59- 72. | |
| 3 |
SONG J H , HE X . Model-based fault diagnosis of networked systems: a survey[J]. Asian Journal of Control, 2022, 24 (2): 526- 536.
doi: 10.1002/asjc.2543 |
| 4 |
GAO Z W , CECATI C , DING S X . A survey of fault diagnosis and fault-tolerant techniques—Part Ⅰ: fault diagnosis with model-based and signal-based approaches[J]. IEEE Trans.on Industrial Electronics, 2015, 62 (6): 3757- 3767.
doi: 10.1109/TIE.2015.2417501 |
| 5 | 黄勇, 张鹏飞, 王林, 等. 基于特征结构配置的火炮伺服控制系统鲁棒故障检测[J]. 计算机测量与控制, 2013, 21 (12): 3293- 3295. |
| HUANG Y , ZHANG P F , WANG L , et al. Robust fault detection of gun servo controlled system based on eigenstructure assignment[J]. Computer Measurement and Control, 2013, 21 (12): 3293- 3295. | |
| 6 | YAO X , LE V , LEE I . Unknown input observer-based series DC arc fault detection in DC microgrids[J]. IEEE Trans.on Power Electronics, 2021, 37 (4): 4708- 4718. |
| 7 | GAO Z , LIU X , CHEN M Z Q . Unknown input observer-based robust fault estimation for systems corrupted by partially decoupled disturbances[J]. IEEE Trans.on Industrial Electronics, 2015, 63 (4): 2537- 2547. |
| 8 |
ABBASI A , POSHTAN J . Robust state estimation for a class of uncertain nonlinear systems: comparison of two approaches[J]. ISA Transactions, 2017, 68, 48- 53.
doi: 10.1016/j.isatra.2017.02.015 |
| 9 |
YANG J Q , ZHU F L , WANG X , et al. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems[J]. International Journal of Control, Automation and Systems, 2015, 13 (5): 1037- 1046.
doi: 10.1007/s12555-014-0159-4 |
| 10 |
XIAO B , CAO L , XU S Y , et al. Robust tracking control of robot manipulators with actuator faults and joint velocity mea-surement uncertainty[J]. IEEE/ASME Trans.on Mechatronics, 2020, 25 (3): 1354- 1365.
doi: 10.1109/TMECH.2020.2975117 |
| 11 |
LEVANT A . Robust exact differentiation via sliding mode technique[J]. Automatica, 1998, 34 (3): 379- 384.
doi: 10.1016/S0005-1098(97)00209-4 |
| 12 | MORENO J A, OSORIO M. A Lyapunov approach to second-order sliding mode controllers and observers[C]//Proc. of the IEEE 47th Conference on Decision and Control, 2008: 2856-2861. |
| 13 |
CACCAVALE F , CILIBRIZZI P , PIERRI F , et al. Actuators fault diagnosis for robot manipulators with uncertain model[J]. Control Engineering Practice, 2009, 17 (1): 146- 157.
doi: 10.1016/j.conengprac.2008.05.012 |
| 14 |
ZHANG C , YU S H . Disturbance observer-based prescribed performance super-twisting sliding mode control for autonomous surface vessels[J]. ISA Transactions, 2023, 135, 13- 22.
doi: 10.1016/j.isatra.2022.09.025 |
| 15 | CAO G Z, SHI H G, ZHANG X K, et al. Continuous super-twisting observer-based super-twisting control of Euler-Lagrange systems[C]//Proc. of the 14th International Conference on Intelligent Robotics and Applications, 2021: 455-465. |
| 16 |
EDWARDS C , SHTESSEL Y . Adaptive dual-layer super-twisting control and observation[J]. International Journal of Control, 2016, 89 (9): 1759- 1766.
doi: 10.1080/00207179.2016.1175030 |
| 17 |
GONZÁLEZ J A C , SALAS-PEÁA O , DELEÓN-MORALES J . Observer-based super twisting design: a comparative study on quadrotor altitude control[J]. ISA Transactions, 2021, 109, 307- 314.
doi: 10.1016/j.isatra.2020.10.026 |
| 18 | 宫勋, 付云博, 姜良旭, 等. Super-twisting扩张状态观测器在四旋翼飞行器故障重构中的应用[J]. 系统工程与电子技术, 2020, 42 (9): 2077- 2084. |
| GONG X , FU Y B , JIANG L X , et al. Application of super-twisting extended state observer in fault reconfiguration of quadrotor aircraft[J]. Systems Engineering and Electronics, 2020, 42 (9): 2077- 2084. | |
| 19 |
LIN X P , ZHANG B , FANG S X , et al. Adaptive generalized super twisting sliding mode control for PMSMs with filtered high-gain observer[J]. ISA Transactions, 2023, 138, 639- 649.
doi: 10.1016/j.isatra.2023.02.008 |
| 20 |
EDWARDS C , SPURGEON S K , PATTON R J . Sliding mode observers for fault detection and isolation[J]. Automatica, 2000, 36 (4): 541- 553.
doi: 10.1016/S0005-1098(99)00177-6 |
| 21 |
CUI L , ZHANG R Z , YANG H J , et al. Adaptive super-twisting trajectory tracking control for an unmanned aerial vehicle under gust winds[J]. Aerospace Science and Technology, 2021, 115, 106833.
doi: 10.1016/j.ast.2021.106833 |
| 22 | JI P , MIN F , ZHANG F F , et al. Tele-aiming control design for reconnaissance robot using a strong tracking multi-model extended super-twisting observer[J]. IET Control Theory & Applications, 2023, 17 (6): 696- 712. |
| 23 |
LI Y , TAN P L , LIU J J , et al. A super-twisting extended state observer for nonlinear systems[J]. Mathematics, 2022, 10 (19): 3584- 3898.
doi: 10.3390/math10193584 |
| 24 | 赵凯辉, 冷傲杰, 何静, 等. 基于超螺旋滑模观测器的六相永磁同步电机失磁故障重构[J]. 电子测量与仪器学报, 2020, 34 (10): 123- 131. |
| ZHAO K H , LENG A J , HE J , et al. Reconstruction of demagnetization fault of six-phase permanent magnet synchronous motor based on super-twisting sliding-mode observer[J]. Journal of Electronic Measurement and Instrumentation, 2020, 34 (10): 123- 131. | |
| 25 | 张伟键, 都海波, 朱文武, 等. 基于广义超螺旋算法的无速度传感器永磁同步电机有限时间速度控制[J]. 控制理论与应用, 2021, 38 (6): 833- 841. |
| ZHANG W J , DU H B , ZHU W W , et al. Finite-time speed sensorless control of permanent synchronous motor based on generalized super-twisting algorithm[J]. Control Theory and Application, 2021, 38 (6): 833- 841. | |
| 26 |
DELLA S C , KATZSCHMANN R K , BICCHI A , et al. Model-based dynamic feedback control of a planar soft robot: trajectory tracking and interaction with the environment[J]. The International Journal of Robotics Research, 2020, 39 (4): 490- 513.
doi: 10.1177/0278364919897292 |
| 27 | HU Q L , JIANG B Y , ZHANG Y M . Observer-based output feedback attitude stabilization for spacecraft with finite-time convergence[J]. IEEE Trans.on Control Systems Technology, 2017, 27 (2): 781- 789. |
| 28 | ZOU A M . Finite-time output feedback attitude tracking control for rigid spacecraft[J]. IEEE Trans.on Control Systems Technology, 2013, 22 (1): 338- 345. |
| 29 | CELANI F. A Luenberger-style observer for robot manipulators with position measurements[C]//Proc. of the 14th Mediterranean Conference on Control and Automation, 2006: 28-30. |
| [1] | Zichang LIU, Yongsheng BAI, Siyu LI, Xisheng JIA. Diesel engine fault diagnosis method based on wavelet time-frequency diagram and Swin Transformer [J]. Systems Engineering and Electronics, 2023, 45(9): 2986-2998. |
| [2] | Yukun CHEN, Hui YU, Ningyun LU. Fault diagnosis of radar T/R module based on semi-supervised deep learning [J]. Systems Engineering and Electronics, 2023, 45(10): 3329-3337. |
| [3] | Sheng GAO, Guangfu MA, Yanning GUO. Fast reconstruction of multiple faults based on adaptive unknown input observer [J]. Systems Engineering and Electronics, 2022, 44(7): 2364-2373. |
| [4] | Zhaoguo HOU, Huawei WANG, Liang ZHOU, Qiang FU. Fault diagnosis of rotating machinery based on improved deep residual network [J]. Systems Engineering and Electronics, 2022, 44(6): 2051-2059. |
| [5] | Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed finite-time adaptive cooperative fault-tolerant control for multi-agent systems with integrated actuators faults [J]. Systems Engineering and Electronics, 2022, 44(4): 1220-1229. |
| [6] | Ruifeng LI, Aiqiang XU, Weichao SUN, Shuyou WANG. Recommendation method for avionics feature selection algorithm basedon meta-learning [J]. Systems Engineering and Electronics, 2021, 43(7): 2011-2020. |
| [7] | Li WANG, Ziqi LIU. Fault diagnosis of analog circuit for WPA-IGA-BP neural network [J]. Systems Engineering and Electronics, 2021, 43(4): 1133-1143. |
| [8] | Jinling DAI, Aiqiang XU. Local multiple kernel extreme learning machine fault diagnosis model with dynamic fuzzy clustering for avionics [J]. Systems Engineering and Electronics, 2021, 43(3): 637-646. |
| [9] | Chen MENG, Huahui YANG, Cheng WANG, Zheng MA. Review on data-driven fault diagnosis for electronic components and units level of weapon system [J]. Systems Engineering and Electronics, 2021, 43(2): 574-583. |
| [10] | Yunfei MA, Xisheng JIA, Huajun BAI, Chiming GUO, Shuangchuan WANG. Fault diagnosis of compressed vibration signal based on 1-dimensional CNN with optimized parameters [J]. Systems Engineering and Electronics, 2020, 42(9): 1911-1919. |
| [11] | Bo LI, Lin ZHANG, Wenfeng WANG, Guannan WANG. Fault feature extraction method based on Park-HHT [J]. Systems Engineering and Electronics, 2020, 42(12): 2944-2952. |
| [12] | LIU Jiufu, ZHANG Zhiguo, ZHENG Rui, LIU Haiyang, YANG Zhong, WANG Zhisheng. Fault diagnosis of bipropellant propulsion system using partially observed time Petri nets [J]. Systems Engineering and Electronics, 2018, 40(6): 1337-1344. |
| [13] | ZHU Wei, MA Weiming, YANG Xidang, XIAO Huan. Tracking control of ship borne quad-roto UAV based on robust fault diagnosis LPV model [J]. Systems Engineering and Electronics, 2018, 40(11): 2540-. |
| [14] | WEI Zijie, CHEN Shengjian. Fault diagnosis for circuits with tolerance based on multifeature cloud relational matrix#br# [J]. Systems Engineering and Electronics, 2017, 39(12): 2665-2670. |
| [15] | CHEN Yin-sheng, JIANG Shou-da, LIU Xiao-dong, YANG Jing-li, WANG Qi. Self-validating gas sensor fault diagnosis method based on EEMD sample entropy and SRC [J]. Systems Engineering and Electronics, 2016, 38(5): 1215-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||