Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (4): 1220-1229.doi: 10.12305/j.issn.1001-506X.2022.04.19
• Systems Engineering • Previous Articles Next Articles
Distributed finite-time adaptive cooperative fault-tolerant control for multi-agent systems with integrated actuators faults
Pu ZHANG*, Huifeng XUE, Shan GAO, Xuan ZUO
- School of Automation, Northwestern Polytechnical University, Xi'an 710129, China
-
Received:2021-06-30Online:2022-04-01Published:2022-04-01 -
Contact:Pu ZHANG
CLC Number:
Cite this article
Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed finite-time adaptive cooperative fault-tolerant control for multi-agent systems with integrated actuators faults[J]. Systems Engineering and Electronics, 2022, 44(4): 1220-1229.
share this article
Table 1
Actuator failure types"
| 类型 | 数值 |
| 部分失效故障 | 0<ρ1<ρ2<1, ζ1=0 |
| 完全失效故障 | ρi=1, ζi=0 |
| 偏置故障 | 0<ρ1<ρ2<1, ζ1=1 |
| 卡死故障 | ρi=1, ζi=1 |

Fig.1
Multi-agent systems network topology diagram (N=10)"

Table 2
Initial state of the multi-agent systems"
| 智能体编号 | xi/m | yi/m | vi/(m/s) | wi/(rad/s) |
| 智能体#1 | 4 | -5 | 1 | 0 |
| 智能体#2 | 2 | -4 | 3 | 0 |
| 智能体#3 | 4 | 1 | 1 | 0 |
| 智能体#4 | 3 | 1.5 | 0.5 | 0 |
| 智能体#5 | 3.5 | 2 | 3 | 0 |
| 智能体#6 | 1 | 2 | 2 | 0 |
| 智能体#7 | 3 | 8 | 1 | 0 |
| 智能体#8 | 2 | 9 | 3 | 0 |
| 智能体#9 | 1 | 10 | 2 | 0 |
| 智能体#10 | 2.5 | 11 | 2 | 0 |

Fig.2
Estimation curves of control parameters β1 and β2"

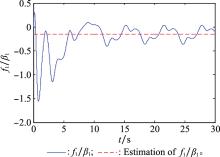
Fig.3
Neural network approximation curve of f1/β1"


Fig.4
Neural network approximation curve of f2/β2"


Fig.5
Neural network approximation curve of f(x1, x2)"


Fig.6
Trajectory curve of robot formation"

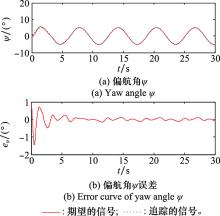
Fig.7
Yaw angle ψ and error curves of the robot"

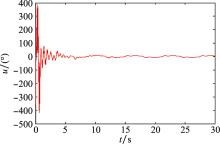
Fig.8
Control input signal variation u curve of robot#1"


Fig.9
Variation curves of the yaw rate r1 and r2 of robot #5 in control parameters β1 and β2"

| 1 |
GAO R , HUANG J S , WANG L . Leaderless consensus control of uncertain multi-agents systems with sensor and actuator attacks[J]. Information Sciences, 2019, 505, 144- 156.
doi: 10.1016/j.ins.2019.07.075 |
| 2 |
SENANAYAKE M , SENTHOORAN I , BARCA J C , et al. Search and tracking algorithms for swarms of robots: a survey[J]. Robotics and Autonomous Systems, 2016, 75, 422- 434.
doi: 10.1016/j.robot.2015.08.010 |
| 3 |
LIN P , REN W , WANG H , et al. Multi-agent rendezvous with shortest distance to convex regions with empty intersection: algorithms and experiments[J]. IEEE Trans. on Cybernetics, 2019, 49 (3): 1026- 1034.
doi: 10.1109/TCYB.2018.2794506 |
| 4 |
NGUYEN N T , PRODAN I , PETAKE F , et al. Hierarchical control of a quadcopter under stuck actuator fault[J]. IFAC-Papers Online, 2020, 53 (2): 4258- 4263.
doi: 10.1016/j.ifacol.2020.12.2479 |
| 5 |
WANG F , ZHANG X Y . Adaptive finite time control of nonli-near systems under time-varying actuator failures[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2019, 49 (9): 1845- 1852.
doi: 10.1109/TSMC.2018.2868329 |
| 6 | YAZDANI S , HAERI M . Robust adaptive fault-tolerant control for leader-follower flocking of uncertain multi-agent systems with actuator failure[J]. ISA Transactions, 2017, 71 (Part 2): 227- 234. |
| 7 |
LIANG Y I , ZHANG H G , DUAN J , et al. Event-triggered reinforcement learning H∞ control design for constrained-input nonlinear systems subject to actuator failures[J]. Information Sciences, 2021, 543, 273- 295.
doi: 10.1016/j.ins.2020.07.055 |
| 8 |
XU D Z , ZHU F L , ZHOU Z P , et al. Distributed fault detection and estimation in cyber-physical systems subject to actuator faults[J]. ISA Transactions, 2020, 104, 162- 174.
doi: 10.1016/j.isatra.2019.12.002 |
| 9 |
MEYSAM A , NADER M . Fault-tolerant control of nonlinear heterogeneous multi-agent systems[J]. Automatica, 2021, 127, 109514.
doi: 10.1016/j.automatica.2021.109514 |
| 10 | LU Q , SHI P , WU L G , et al. Event-triggered estimation and model predictive control for linear systems with actuator fault[J]. IET Control Theory & Applications, 2020, 14 (16): 2406- 2412. |
| 11 |
WANG Y , ROTONDO D , PUIG V , et al. Fault-tolerant control based on virtual actuator and sensor for discrete-time descriptor systems[J]. IEEE Trans. on Circuits and Systems Ⅰ: Regular Papers, 2020, 67 (12): 5316- 5325.
doi: 10.1109/TCSI.2020.3015887 |
| 12 |
ZHANG J L , ZHANG P , YAN J G . Distributed adaptive finite-time compensation control for UAV swarm with uncertain disturbances[J]. IEEE Trans. on Circuits and Systems Ⅰ: Re-gular Papers, 2021, 68 (2): 829- 841.
doi: 10.1109/TCSI.2020.3034979 |
| 13 | TOUSI J , KAMALI M , IZADI I , et al. Distributed adaptive dynamic surface control for synchronization of uncertain nonli-near multi-agent systems[J]. International Journal of Control Automation & Systems, 2018, 16, 2733- 2742. |
| 14 |
WANG J H , HU X M . Distributed consensus in multi-vehicle cooperative control: theory and applications[J]. IEEE Control Systems Magazine, 2010, 30 (3): 85- 86.
doi: 10.1109/MCS.2010.936430 |
| 15 |
LI Y H , QIANG S , ZHUANG X Y , et al. Robust and adaptive backstepping control for nonlinear systems using RBF neural networks[J]. IEEE Trans. on Neural Networks, 2004, 15 (3): 693- 701.
doi: 10.1109/TNN.2004.826215 |
| 16 |
BHAT S P , BERNSTEIN D S . Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control and Optimization, 2000, 38 (3): 751- 766.
doi: 10.1137/S0363012997321358 |
| 17 | QIAN C J , LIN W . Non-Lipschitz continuous stabilizers for nonli-near systems with uncontrollable unstable linearization[J]. Systems & Control Letters, 2015, 42 (3): 185- 200. |
| 18 |
XU P , LI Y M , TONG S C . Fuzzy adaptive finite-time fault-tolerant control for multi-input and multi-output nonlinear systems with actuator faults[J]. International Journal of Control Automation and Systems, 2019, 17, 1655- 1665.
doi: 10.1007/s12555-018-0751-0 |
| 19 |
NI J K , LIU L , HE W , et al. Adaptive dynamic surface neural network control for non-strict feedback uncertain nonlinear systems with constraints[J]. Nonlinear Dynamics, 2018, 94, 165- 184.
doi: 10.1007/s11071-018-4351-6 |
| 20 |
WANG F , CHEN B , LIU X P , et al. Finite-time adaptive fuzzy tracking control design for nonlinear systems[J]. IEEE Trans. on Fuzzy Systems, 2018, 26 (3): 1207- 1216.
doi: 10.1109/TFUZZ.2017.2717804 |
| 21 |
ZHU J W , YANG G H . Fault accommodation for linear systems with time-varying delay[J]. International Journal of Systems science, 2017, 48 (2): 316- 323.
doi: 10.1080/00207721.2016.1181222 |
| 22 | 张普, 薛惠锋, 高山. 基于分布式自适应的多智能体容错一致性控制[J]. 航空学报, 2020, 41 (3): 279- 291. |
| ZHANG P , XUE H F , GAO S . Distributed adaptive fault-tole-rance consensus control for multi-agent system[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (3): 279- 291. | |
| 23 | REN W , BEARD R W . Distributed consensus in multi-vehicle cooperative control[J]. Communications & Control Engineering, 2008, 27 (2): 71- 82. |
| [1] | Zhe LUO, Wanzhen QUAN, Purui ZHANG, Xiaogang YANG. Consensus tracking control for one-side Lipschitz nonlinear multi-agent systems [J]. Systems Engineering and Electronics, 2022, 44(1): 279-284. |
| [2] | Jiayi LIU, Shaohua YUE, Gang WANG, Xiaoqiang YAO, Jie ZHANG. Cooperative evolution algorithm of multi-agent system under complex tasks [J]. Systems Engineering and Electronics, 2021, 43(4): 991-1002. |
| [3] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [4] | Pu ZHANG, Huifeng XUE, Shan GAO, Xuan ZUO. Distributed adaptive cooperative tracking control of multi-agent system with weak communication [J]. Systems Engineering and Electronics, 2021, 43(2): 487-498. |
| [5] | Jiayi LIU, Gang WANG, Jie ZHANG, Chuang WANG, Xituan SONG. Target optimal assignment model based on improved AGD-distributed multi-Agent system [J]. Systems Engineering and Electronics, 2020, 42(4): 863-870. |
| [6] | ZHOU Jian, GONG Chunlin, GU Liangxian, SU Hua. Distributed synchronization of leader-follower systems with unmatched uncertainties [J]. Systems Engineering and Electronics, 2019, 41(3): 636-642. |
| [7] | NI Peng1,2, LIU Jinmang1, FU Qiang1, GAO Jiale1. #br# Research on layered decisionmaking of multisensor planning based onheterogeneous MAS in antiTBM combat [J]. Systems Engineering and Electronics, 2016, 38(8): 1816-1825. |
| [8] | UN Yi-jie, ZHANG Guo-liang, ZHANG Sheng-xiu, ZENG Jing. Consensus analysis for a class of discrete-time heterogeneous multi-agent system in directed topology [J]. Systems Engineering and Electronics, 2015, 37(3): 693-699. |
| [9] | JIAO Yu-min,WANG Qiang,XU Ting,SU Jing. Multi-agent cooperation mechanism for intelligent virtual maintenance environment [J]. Journal of Systems Engineering and Electronics, 2013, 35(6): 1348-1352. |
| [10] | SHE Ying-ying,FANG Hua-jing . Finite-time tracking control for multi-agent systems [J]. Journal of Systems Engineering and Electronics, 2011, 33(8): 1871-1874. |
| [11] | LIU Yue-feng, ZHANG An. Cooperative task assignment method of manned/unmanned aerial vehicle formation [J]. Journal of Systems Engineering and Electronics, 2010, 32(3): 584-587. |
| [12] | YANG Ping, LIU Wei-dong, BI Yi-ming. Goal conflict resolution of multi-agent systems based on distributed negotiation evolution algorithm [J]. Journal of Systems Engineering and Electronics, 2009, 31(8): 1918-1922. |
| [13] | LI Wei-xiang, ZHANG Guang-ming, LI Bang-yi. Research on multi-attributes task allocation mechanism in MAS [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1113-1116. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||