Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (7): 2525-2533.doi: 10.12305/j.issn.1001-506X.2024.07.35
• Communications and Networks • Previous Articles
Event-triggered communication of multiple unmanned ground vehicles collaborative based on MADDPG
Hongda GUO, Jingtao LOU, Youchun XU, Peng YE, Yongle LI, Jinsheng CHEN
- Army Military Transportation University, Tianjin 300161, China
-
Received:2023-05-11Online:2024-06-28Published:2024-07-02 -
Contact:Yongle LI
CLC Number:
Cite this article
Hongda GUO, Jingtao LOU, Youchun XU, Peng YE, Yongle LI, Jinsheng CHEN. Event-triggered communication of multiple unmanned ground vehicles collaborative based on MADDPG[J]. Systems Engineering and Electronics, 2024, 46(7): 2525-2533.
share this article

Fig.1
Event-triggered communication strategy model"


Fig.2
Event-triggered communication learning framework"

Table 1
Simulation parameter settings"
| 变量 | 值 |
| 控制周期/s | 0.1 |
| 通信周期/s | 0.02 |
| 每回合的步数 | 100 |
| 回合的数量 | 106 |
| 隐藏层的数量 | 4 |
| 每层的单位数 | 64 |
| 隐藏层的激活函数 | ReLU |
| critic网络输出层的激活函数 | Linear |
| actor网络输出层的激活函数 | Tanh |
| 折扣系数 | 0.99 |
| 批量大小 | 4 096 |
| 回放缓冲区 | 1.0×106 |

Fig.3
Comparison of average reward for pursuit"


Fig.4
Multiple unmanned ground vehicle trajectory"
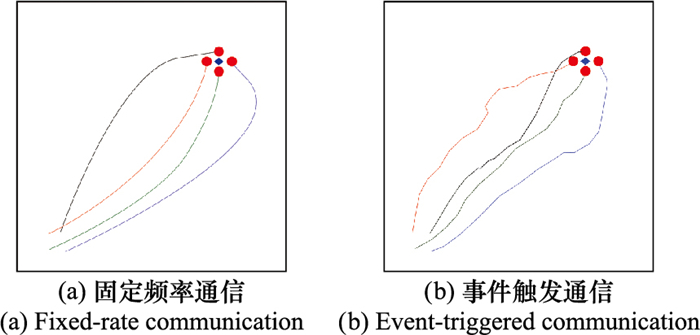

Fig.5
Triggered time and triggered interval"
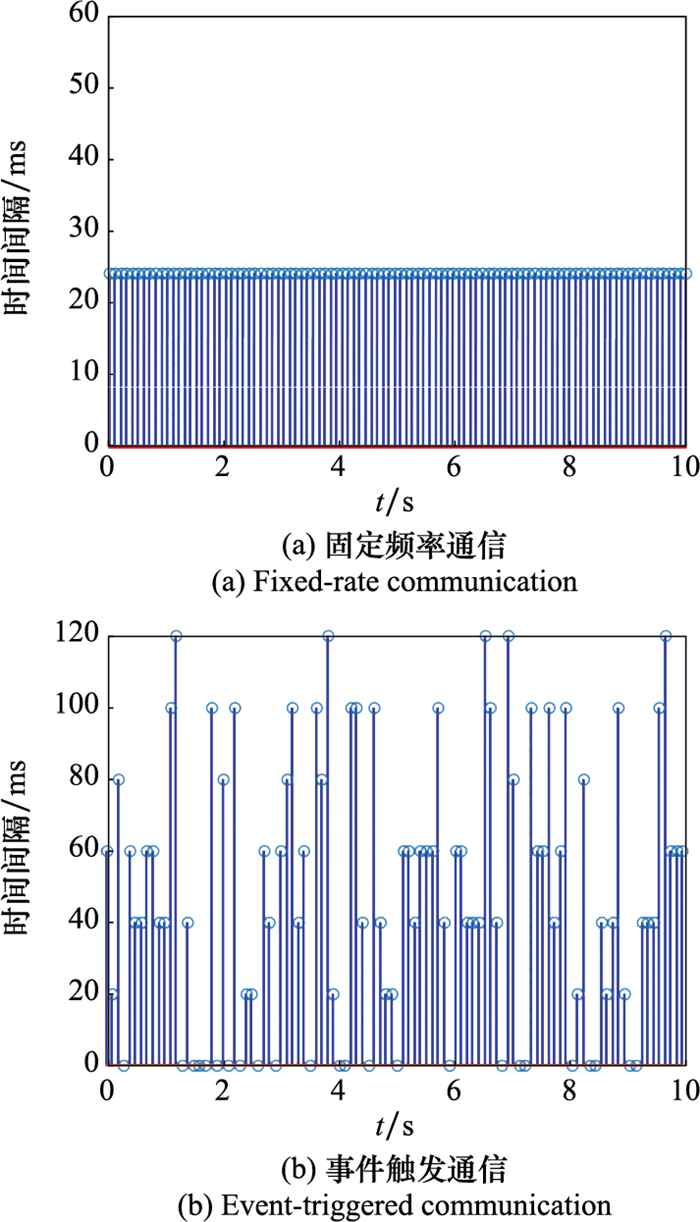
Table 2
Simulation parameter settings"
| 参数 | 取值 |
| 控制周期/s | 0.25 |
| 通信周期/s | 0.05 |
| 每回合的步数 | 150 |
| 训练迭代次数 | 106 |
| 批量大小 | 4 096 |
| 回放缓冲区 | 106 |

Fig.6
Trajectory of each vehicle in the event of a breakdown"
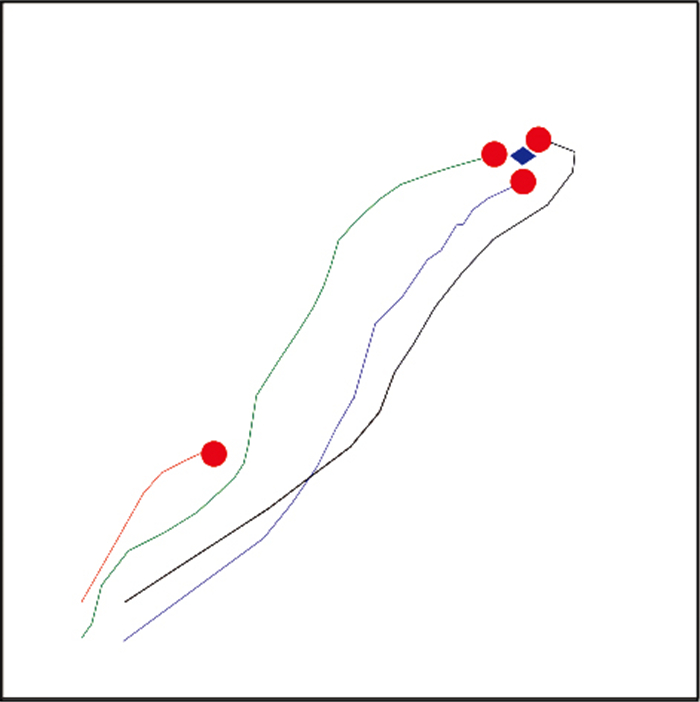
Table 3
Comparison of success rates"
| 通信策略 | 成功率 |
| 高固定频率 | 0.91 |
| 低固定频率 | 0.77 |
| 无通信 | 0.35 |
| 基于事件触发通信 | 0.89 |

Fig.7
Unmanned ground vehicle platform"
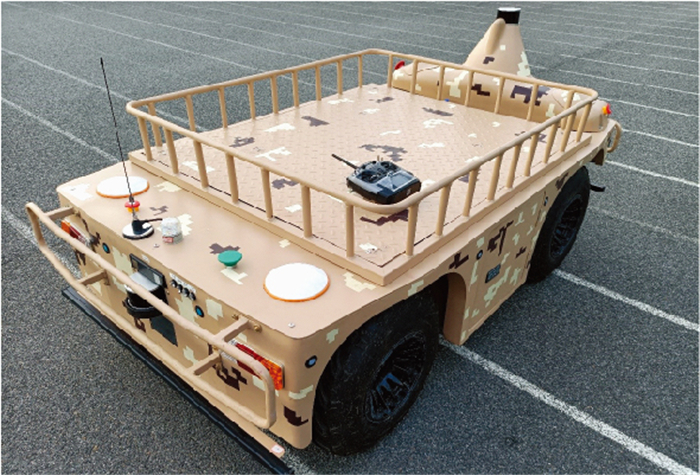

Fig.8
Multi-unmanned vehicle trajectory after training"

Table 4
Performance comparison"
| 通信策略 | 平均耗时/s | 总路径长度/m | 累计发出数据量/m |
| 固定频率通信 | 55.36 | 166.91 | 2 049.82 |
| 事件触发通信 | 57.22 | 180.17 | 907.33 |
| 14 | ZHOU T , LIU Q L , WANG D , et al. Leader-following consensus for linear multi-agent systems based on integral-type event-triggered strategy[J]. Control and Decision, 2022, 37 (5): 1258- 1266. |
| 15 | 王浩亮, 柴亚星, 王丹, 等. 基于事件触发机制的多自主水下航行器协同路径跟踪控制[J]. 自动化学报, 2022, 45 (2): 1001- 1011. |
| WANG H L , CHAI Y X , WANG D , et al. Event-triggered cooperative path following of multiple autonomous underwater vehicles[J]. Acta Automatica Sinica, 2022, 45 (2): 1001- 1011. | |
| 16 | 陈世明, 邵赛, 姜根兰. 基于事件触发二阶多智能体系统的固定时间比例一致性[J]. 自动化学报, 2022, 48 (1): 261- 270. |
| CHEN S M , SHANG S , JIANG G L . Distributed event-triggered fixed-time scaled consensus control for second-order multi-agent systems[J]. Acta Automatica Sinica, 2022, 48 (1): 261- 270. | |
| 17 | PENG C , LI F Q . A survey on recent advances in event-triggered communication and control[J]. Information Sciences, 2018, 457 (8): 113- 125. |
| 18 | HUTTENRAUCH M , SOSIC A , NEUMANN G . Deep reinforcement learning for swarm systems[J]. Journal of Machine Learning Research, 2019, 20 (54): 1- 31. |
| 19 | WANG Z F , GAO Y B , LIU Y F , et al. Distributed dynamic event-triggered communication and control for multi-agent consensus: a hybrid system approach[J]. Information Sciences, 2022, 618 (12): 191- 208. |
| 20 | RYU H C, SHIN H Y, PARK J K. Multi-agent actor-critic with hierarchical graph attention network[C]//Proc.of the 34th AAAI Conferenceon Artificial Intelligence, 2020: 7236-7243. |
| 21 | ZHU X D , ZHANG F , LI H . Swarm deep reinforcement learning for robotic manipulation[J]. Procedia Computer Science, 2022, 198 (12): 472- 479. |
| 22 | LOWE R, WU Y, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments[C]//Proc.of the 31st International Conference on Neural Information Processing Systems, 2017: 6382-6393. |
| 1 |
张梦钰, 豆亚杰, 陈子夷, 等. 深度强化学习及其在军事领域中的应用综述[J]. 系统工程与电子技术, 2024, 46 (4): 1297- 1308.
doi: 10.12305/j.issn.1001-506X.2024.04.18 |
|
ZHANG M Y , DOU Y J , CHEN Z Y , et al. Deep reinforcement learning and its applications in military field[J]. Systems Engineering and Electronics, 2024, 46 (4): 1297- 1308.
doi: 10.12305/j.issn.1001-506X.2024.04.18 |
|
| 2 | 费博雯, 包卫东, 刘大千, 等. 面向动态目标搜索与打击的空地协同自主任务分配方法[EB/OL].[2023-05-11].http://kns.cnki.net/kcms/detail/11.2422.TN.20221228.1702.020.html. |
| FEI B W, BAO W D, LIU D Q, et al. Air-ground cooperative autonomous task allocation method for dynamic target search and strike[EB/OL].[2023-05-11]. http://kns.cnki.net/kcms/detail/11.2422.TN.20221228.1702.020.html. | |
| 3 | ZHANG Z, WANG X H, ZHANG Q R, et al. Multi-robot cooperative pursuit via potential field-enhanced reinforcement learning[C]//Proc.of the International Conference on Robotics and Automation, 2022: 8808-8814. |
| 4 | OLSEN T, STIFFLER N M, O’KANE J M. Rapid recovery from robot failures in multi-robot visibility-based pursuit-evasion[C]//Proc.of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021: 9734-9741. |
| 5 | BAUMANN D, ZHU J J, MARTIUS G, et al. Deep reinforcement learning for event-triggered control[C]//Proc.of the IEEE Conference on Decision and Control, 2018: 943-950. |
| 6 | HU G Z , ZHU Y H , ZHAO D B , et al. Event-triggered communication network with limited-bandwidth constraint for multi-agent reinforcement learning[J]. IEEE Trans. on Neural Networks and Learning Systems, 2021, 34 (8): 3966- 3978. |
| 7 |
OTTE M , KUHLMAN M , SOFGE D . Competitive target search with multi-agent teams: symmetric and asymmetric communication constraints[J]. Autonomous Robots, 2018, 42 (6): 1207- 1230.
doi: 10.1007/s10514-017-9687-0 |
| 8 |
DENG C , WEN C Y , WANG W , et al. Distributed adaptive tracking control for high-order nonlinea multiagent systems over event-triggered communication[J]. IEEE Trans. on Automatic Control, 2023, 68 (2): 1176- 1183.
doi: 10.1109/TAC.2022.3148384 |
| 9 | WANG Z J , YANG G , SU X S , et al. Ouijabots: omnidirectional robots for cooperative object transport with rotation control using no communication[J]. Distributed Autonomous Robotic Systems, 2018, 6, 117- 131. |
| 23 | FUNK N , BAUMANN D , BERENZ V , et al. Learning event-triggered control from data through joint optimization[J]. IFAC Journal of Systems and Control, 2021, 16 (6): 100144- 100161. |
| 24 | FOERSTER J, FARQUHAR G, AFOURAS T, et al. Counterfactual multi-agent policy gradients[C]//Proc.of the AAAI Conference on Artificial Intelligence, 2018: 2974-2982. |
| 25 | MIYAZAKI K, MATSUNAGA N, MURATA K, et al. Formation path learning for cooperative transportation of multiple robots using[C]//Proc.of the 21st International Conference on Control, Automation and Systems, 2021: 1619-1623. |
| 26 | GONZÁLEZ-SIERRA J , FLORES-MONTES D , HERNANDEZ-MARTINEZ E G , et al. Robust circumnavigation of a heterogeneous multi-agent system[J]. Autonomous Robots, 2021, 45 (2): 265- 281. |
| 27 |
CHEN Z Y , NIU B , ZHANG L , et al. Command filtering-based adaptive neural network control for uncertain switched nonlinear systems using event-triggered communication[J]. International Journal Robust Nonlinear Control, 2022, 32 (11): 6507- 6522.
doi: 10.1002/rnc.6154 |
| 28 | MEISTER D , DVRR F , ALLGOWER F . Shared network effects in time-versus event-triggered consensus of a single-integrator multi-agent system[J]. IFAC-Papers Online, 2023, 56 (2): 5975- 5980. |
| 29 | HUA M, ZHANG C F, LI Z, et al. Multi-agent deep reinforcement learning for charge-sustaining control of multi-mode hybrid vehicles[EB/OL].[2023-05-11]. https://arxiv.org/abs/2209.02633. |
| 30 | OLFATI-SABER R , FAX J A , MURRAY R M . Consensus and cooperation in networked multi-agent systems[J]. Proceedings of the IEEE, 2007, 95 (1): 215- 233. |
| 10 | 邓甲, 王付永, 刘忠信, 等. 动态事件触发机制下二阶多智能体系统完全分布式控制[J]. 控制理论与应用, 2023, 41 (1): 11- 20. |
| DENG J , WANG F Y , LIU Z X , et al. Fully distributed control for second-order multi-agent systems under dynamic event-triggered mechanism[J]. Control Theory & Applications, 2023, 41 (1): 11- 20. | |
| 11 | 黄兵, 肖云飞, 冯元, 等. 无人艇全分布式动态事件触发编队控制[J]. 控制理论与应用, 2023, 40 (8): 1479- 1487. |
| HUANG B , XIAO Y F , FENG Y , et al. Fully distributed dyna-mic event-triggered formation control for multiple unmanned surface vehicles[J]. Control Theory & Applications, 2023, 40 (8): 1479- 1487. | |
| 12 |
ZUO R W , LI Y H , LYU M . Learning-based distributed containment control for hfv swarms under event-triggered communication[J]. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (1): 568- 579.
doi: 10.1109/TAES.2022.3185969 |
| 13 |
HIRCHE S . Distributed control for cooperative manipulation with event-triggered communication[J]. IEEE Trans. on Robotics, 2020, 36 (4): 1038- 1052.
doi: 10.1109/TRO.2020.2973096 |
| 14 | 周托, 刘全利, 王东, 等. 积分事件触发策略下的线性多智能体系统领导跟随一致性[J]. 控制与决策, 2022, 37 (5): 1258- 1266. |
| [1] | Mengyu ZHANG, Yajie DOU, Ziyi CHEN, Jiang JIANG, Kewei YANG, Bingfeng GE. Review of deep reinforcement learning and its applications in military field [J]. Systems Engineering and Electronics, 2024, 46(4): 1297-1308. |
| [2] | Yanling LI, Feizhou LUO, Zhilei GE. Robust observer-based deep reinforcement learning for attitude stabilization of vertical takeoff and landing vehicle [J]. Systems Engineering and Electronics, 2024, 46(3): 1038-1047. |
| [3] | Fengguo WU, Wei TAO, Hui LI, Jianwei ZHANG, Chengchen ZHENG. UAV intelligent avoidance decisions based on deep reinforcement learning algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1702-1711. |
| [4] | Jin TANG, Yangang LIANG, Zhihui BAI, Kebo LI. Landing control algorithm of rotor UAV based on DQN [J]. Systems Engineering and Electronics, 2023, 45(5): 1451-1460. |
| [5] | Siqi TANG, Zhisong PAN, Guyu HU, Yang WU, Yunbo LI. Application of deep reinforcement learning in space information network——status quo and prospects [J]. Systems Engineering and Electronics, 2023, 45(3): 886-901. |
| [6] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [7] | Lingyu MENG, Bingli GUO, Wen YANG, Xinwei ZHANG, Zuoqing ZHAO, Shanguo HUANG. Network routing optimization approach based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(7): 2311-2318. |
| [8] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [9] | Ang GAO, Zhiming DONG, Liang LI, Jinghua SONG, Li DUAN. Parallel priority experience replay mechanism of MADDPG algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 420-433. |
| [10] | Wen MA, Hui LI, Zhuang WANG, Zhiyong HUANG, Zhaoxin WU, Xiliang CHEN. Close air combat maneuver decision based on deep stochastic game [J]. Systems Engineering and Electronics, 2021, 43(2): 443-451. |
| [11] | Ang GAO, Qisheng GUO, Zhiming DONG, Shaoqing YANG. Research on efficiency evaluation method of multi unmanned ground vehicle system based on EAS+MADRL [J]. Systems Engineering and Electronics, 2021, 43(12): 3643-3651. |
| [12] | Kun ZHANG, Ke LI, Haotian SHI, Zhenchong ZHANG, Zekun LIU. Autonomous guidance maneuver control and decision-making algorithm [J]. Systems Engineering and Electronics, 2020, 42(7): 1567-1574. |
| [13] | XIE Hao, GUO Aihuang, SONG Chunlin, JIAO Runze. eNB selection for LTE-V using deep reinforcement learning [J]. Systems Engineering and Electronics, 2019, 41(7): 1652-1657. |
| [14] | LI Chenxi, CAO Lei, ZHANG Yongliang, CHEN Xiliang, ZHOU Yuhuan, DUAN Liwen. Knowledge-based deep reinforcement learning: a review [J]. Systems Engineering and Electronics, 2017, 39(11): 2603-2613. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||