Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (4): 1098-1110.doi: 10.12305/j.issn.1001-506X.2023.04.18
• Systems Engineering • Previous Articles
Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control
Wei HAN1, Zixuan LIU1, Xichao SU1,*, Kaikai CUI2, Jie LIU3
- 1. Aviation Foundation College, Naval Aeronautical University, Yantai 264001, China
2. Unit 92942 of the PLA, Beijing 100161, China
3. War Research Institute, Academy of Military Science, Beijing 100850, China
-
Received:2022-01-13Online:2023-03-29Published:2023-03-28 -
Contact:Xichao SU
CLC Number:
Cite this article
Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control[J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110.
share this article

Fig.1
Aircraft carrier deck functional area division"

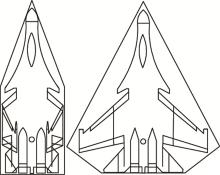
Fig.2
Convex hull model of carrier-based aircraft"
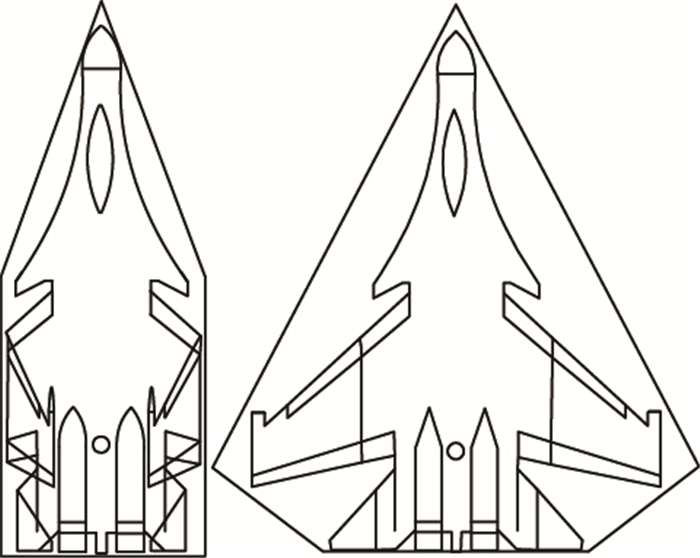
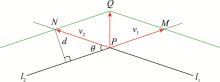
Fig.3
Diagram of polygon expansion algorithm"
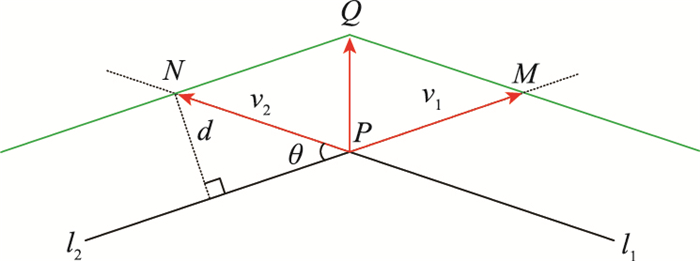
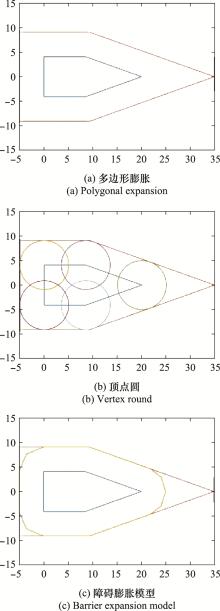
Fig.4
Convex hull model expansion process"
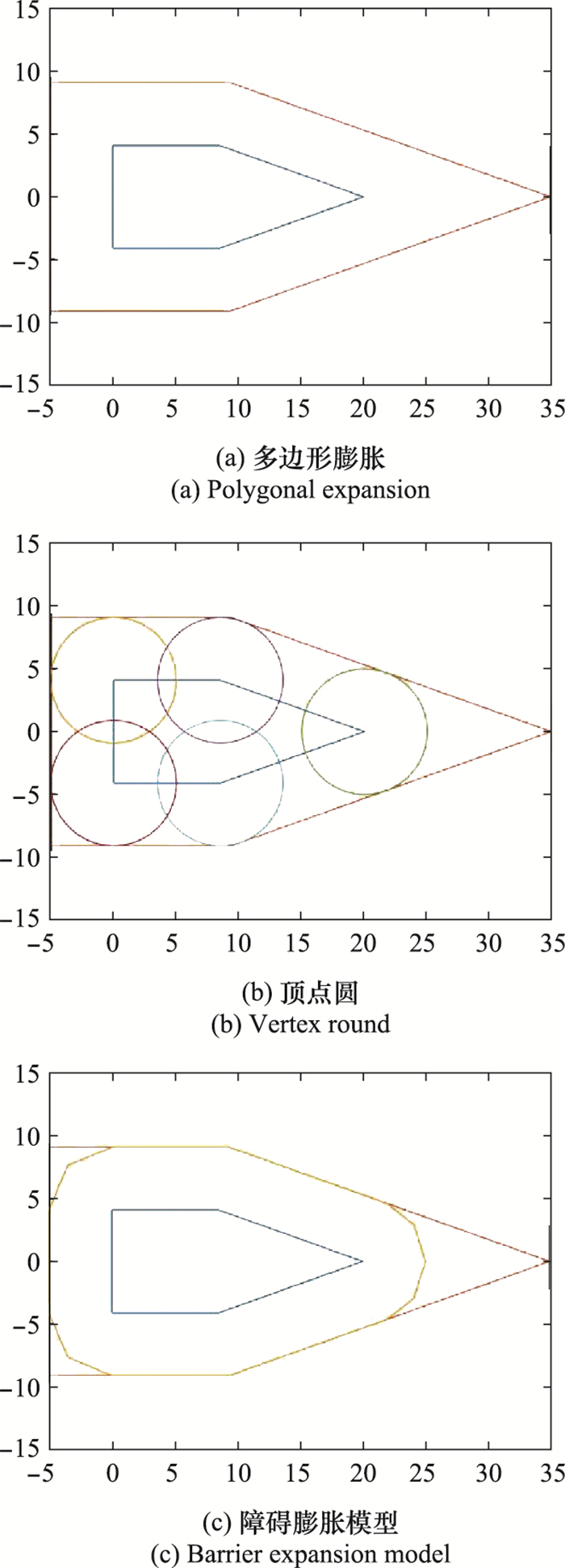
Fig.5
Schematic diagram of path traversing continuous oblique obstacles"


Fig.6
Dynamic measurement of search range (red) before optimization"


Fig.7
Dynamic measurement of search range (red) after optimization"

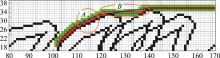
Fig.8
Trajectory diagram before and after re-search optimization"
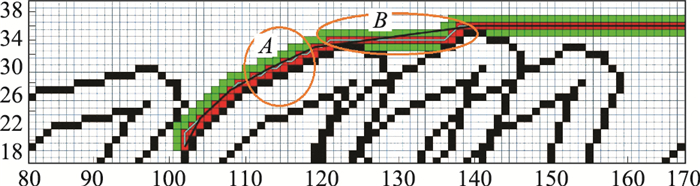

Fig.9
Carrier-based aircraft path planning based on improved A* algorithm"
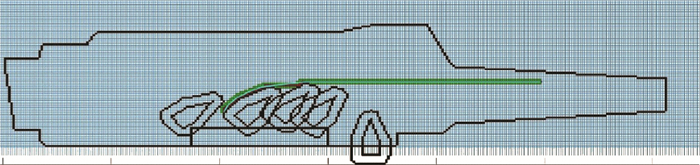
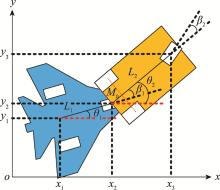
Fig.10
Motion relationship diagram of rodless traction system"

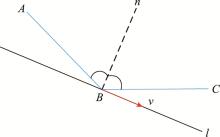
Fig.11
Kinematic solution of key points"
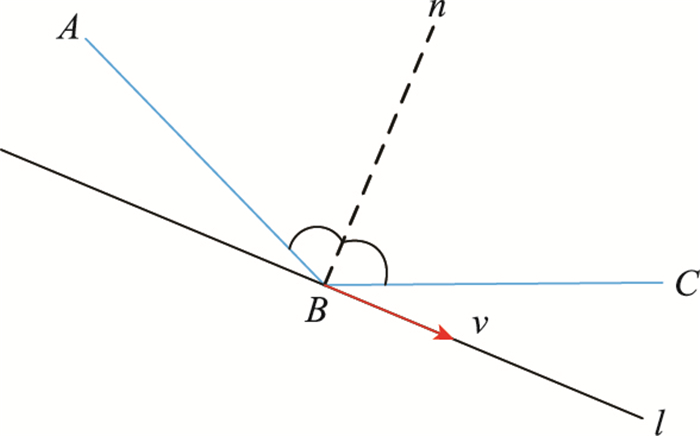

Fig.12
Path planning diagram obtained by optimal control algorithm in scenario 1"
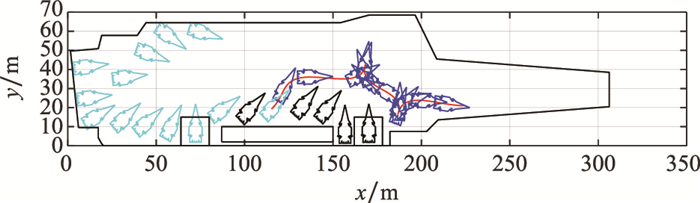
Table 1
Obstacle parameters of scenario 1"
| 障碍编号 | 参数 | |||
| xoi | yoi | ai+d | bi+d | |
| 1 | 105 | 15 | 10 | 20 |
| 2 | 132 | 15 | 8 | 20 |
| 3 | 150 | 15 | 10 | 20 |
| 4 | 155 | 12 | 6 | 15 |
| 5 | 170 | 10 | 10 | 13 |
Table 2
Comparison of simulation results in scenario 1"
| 算法名称 | t/s | max (arctan(|u1|))/(°) | u2波动次数 | v2阶跃次数 |
| 最优控制算法 | 132 | 40 | 4 | 4 |
| 结合改进A*算法与最优控制算法 | 121 | 22 | 2 | 2 |
| 优化结果 | 缩短8.3% | 缩减45%且曲线平缓 | 波动次数减少 | 阶跃次数减少 |

Fig.13
Change curve of control quantity and tractor speed obtained by optimal control algorithm in scenario 1"

Fig.14
Path planning diagram obtained by combining improved A* algorithm with optimal control algorithm in scenario 1"
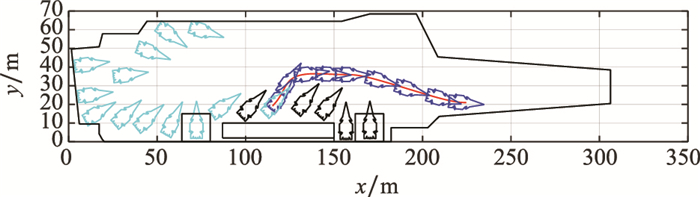

Fig.15
Change curve of control quantity and tractor speed obtained by combining improved A* algorithm with optimal control algorithm in scenario 1"
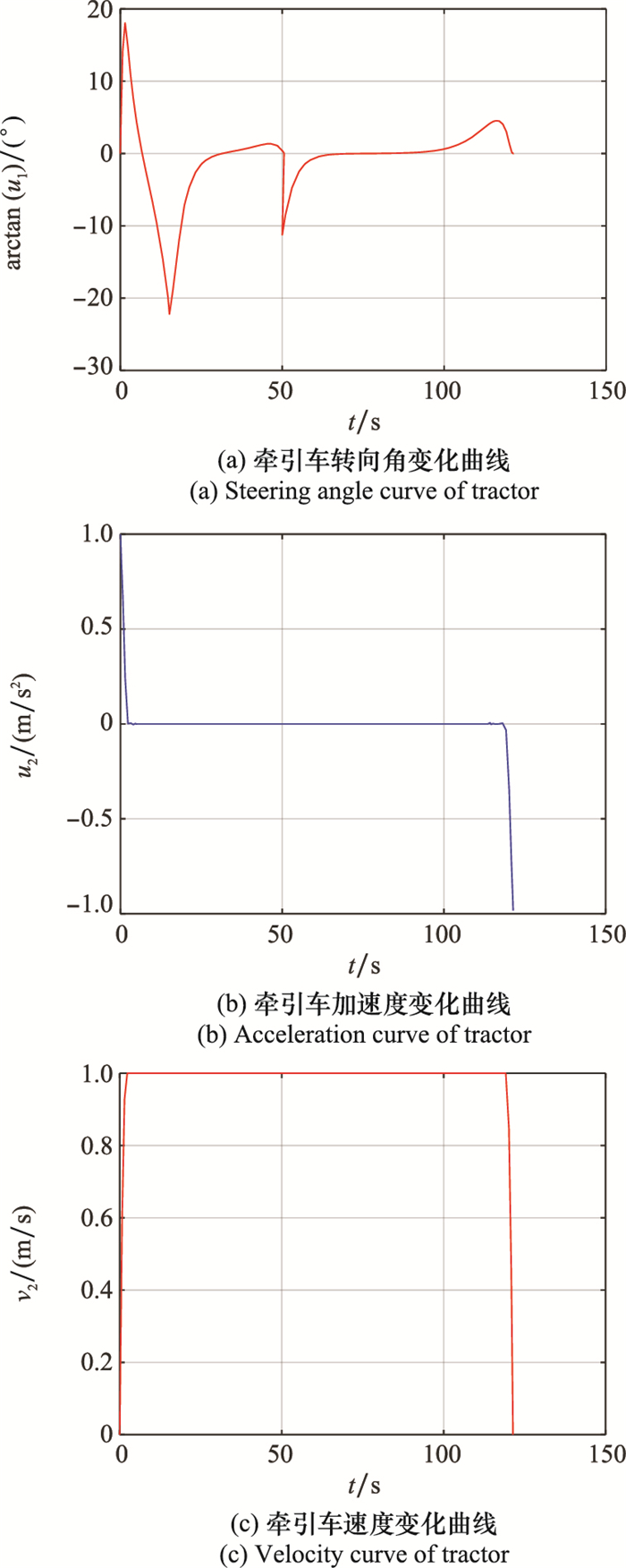
Table 3
Obstacle parameters of scenario 2"
| 障碍编号 | 参数 | |||
| xoi | yoi | ai+d | bi+d | |
| 1 | 73 | 10 | 10 | 13 |
| 2 | 105 | 15 | 10 | 20 |
| 3 | 120 | 15 | 10 | 20 |
| 4 | 132 | 15 | 8 | 20 |
| 5 | 150 | 15 | 10 | 20 |
| 6 | 155 | 12 | 6 | 15 |

Fig.16
Path planning diagram obtained by optimal control algorithm in scenario 2"


Fig.17
Change curve of control quantity and tractor speed obtained by optimal control algorithm in scenario 2"
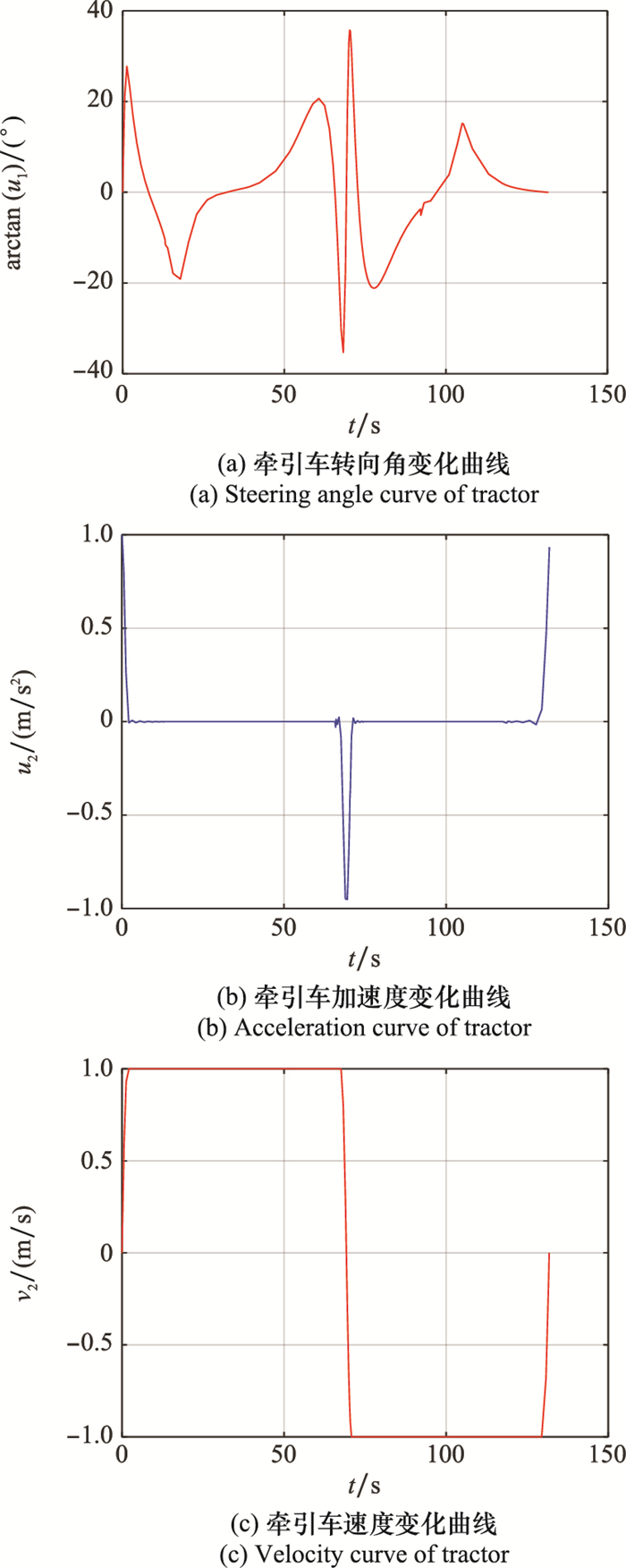
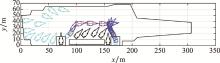
Fig.18
Path planning diagram obtained by combining improved A* algorithm with optimal control algorithm in scenario 2"
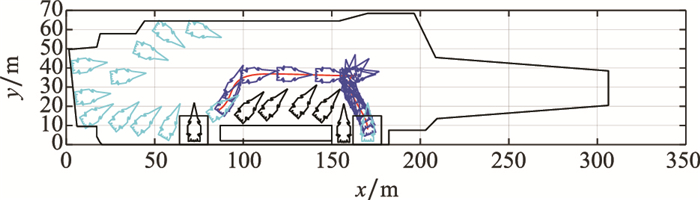
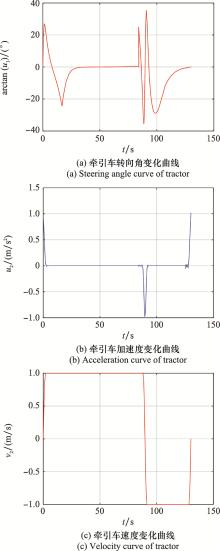
Fig.19
Change curve of control quantity and tractor speed obtained by combining improved A* algorithm with optimal control algorithm in scenario 2"
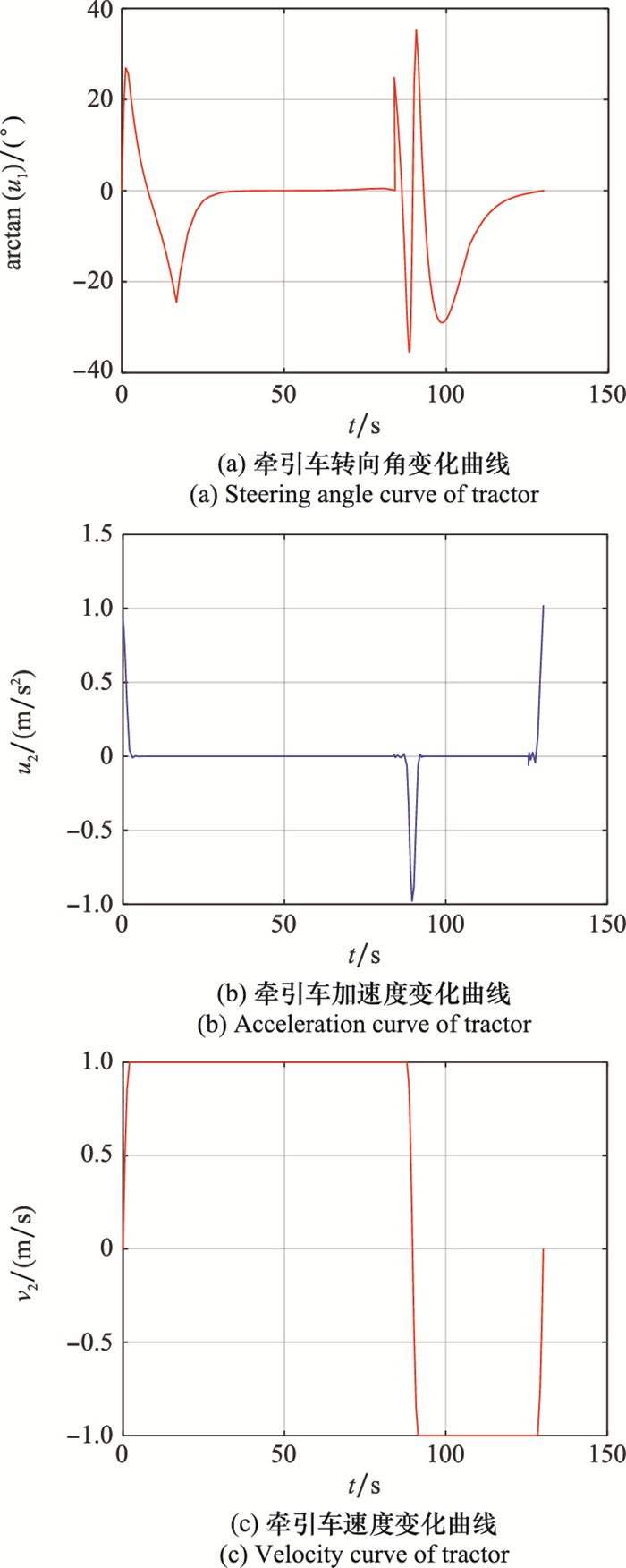
Table 4
Comparison of simulation results in scenario 2"
| 算法名称 | t/s | max (arctan(|u1|))/(°) | u2波动次数 | v2阶跃次数 |
| 最优控制算法 | 131 | 38 | 3 | 3 |
| 结合改进A*算法与最优控制算法 | 130 | 37 | 3 | 3 |
| 优化结果 | 缩短0.8% | 减小2.6%且曲线平缓 | 一致 | 一致 |
Table 5
Obstacle parameters of scenario 3"
| 障碍编号 | 参数 | |||
| xoi | yoi | ai+d | bi+d | |
| 1 | 105 | 15 | 10 | 20 |
| 2 | 120 | 15 | 10 | 20 |
| 3 | 80 | 64 | 10 | 14 |
| 4 | 62 | 60 | 10 | 15 |
| 5 | 50 | 47 | 12 | 8 |
| 6 | 120 | 44 | 18 | 10 |
| 7 | 160 | 55 | 18 | 10 |
| 8 | 110 | 35 | 18 | 10 |

Fig.20
Path planning diagram obtained by combining improved A* algorithm with optimal control algorithm in scenario 3"
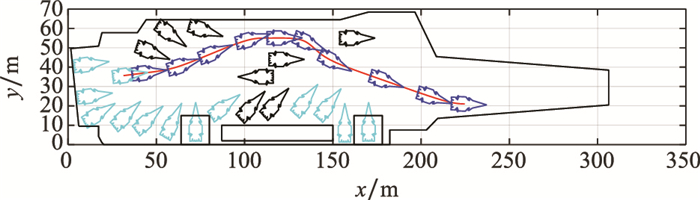

Fig.21
Change curve of control quantity and tractor speed obtained by combining improved A* algorithm with optimal control algorithm in scenario 3"
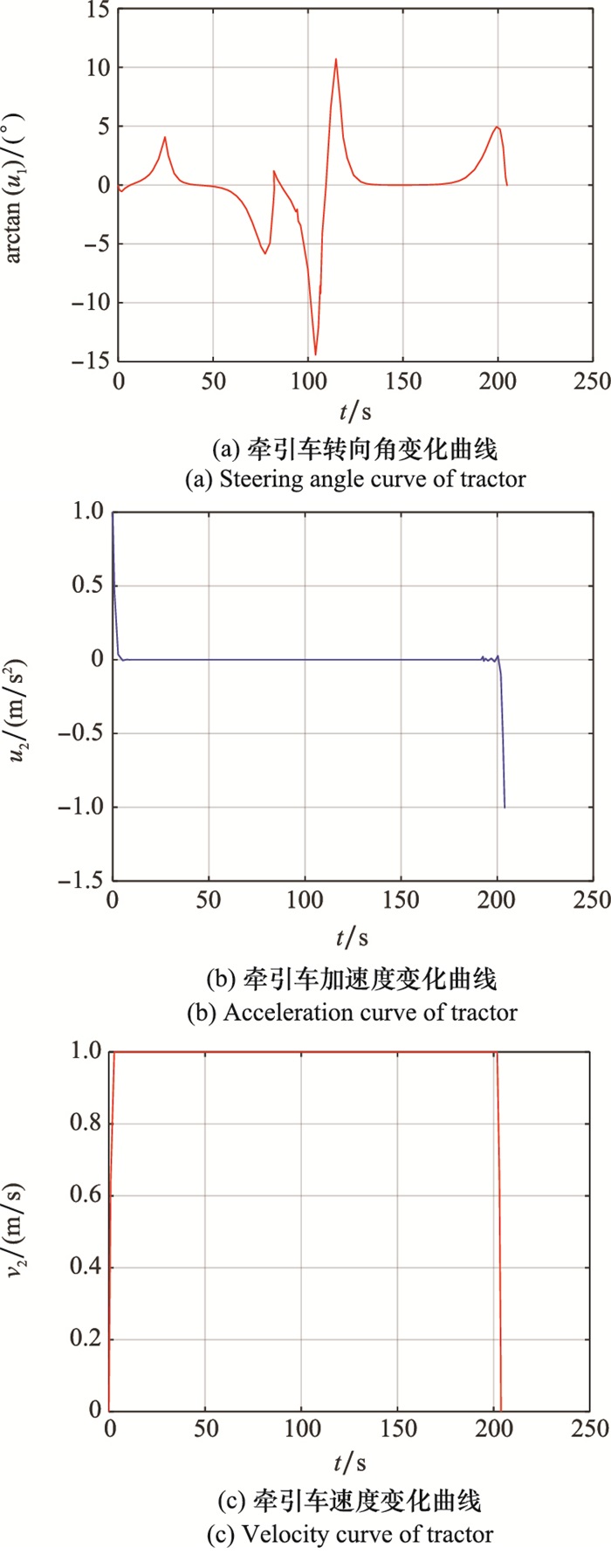

Fig.22
Carrier-borne aircraft deck transport path library"

| 1 |
WANG X W , LIU J , SU X C , et al. A review on carrier aircraft dispatch path planning and control on deck[J]. Chinese Journal of Aeronautics, 2020, 33 (12): 3039- 3057.
doi: 10.1016/j.cja.2020.06.020 |
| 2 | 张竞, 吴宇, 屈香菊. 舰载机牵引系统路径规划方法[J]. 北京航空航天大学学报, 2018, 44 (10): 2125- 2133. |
| ZHANG J , WU Y , QU X J . Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44 (10): 2125- 2133. | |
| 3 | 张智, 林圣琳, 邱兵, 等. 舰载机牵引系统甲板调运避碰路径规划[J]. 系统工程与电子技术, 2014, 36 (8): 1551- 1557. |
| ZHANG Z , LIN S L , QIU B , et al. Collision avoidance path planning of carrier aircraft traction system in dispatching on deck[J]. Systems Engineering and Electronics, 2014, 36 (8): 1551- 1557. | |
| 4 | SI W C , SUN T , SONG C , et al. Design and verification of a transfer path optimization method for an aircraft on the aircraft carrier flight deck[J]. Frontiers of Information Technology & Electronic Engineering, 2021, 22 (9): 1221- 1233. |
| 5 |
WU Y , QU X J . Obstacle avoidance and path planning for carrier aircraft launching[J]. Chinese Journal of Aeronautics, 2015, 28 (3): 695- 703.
doi: 10.1016/j.cja.2015.03.001 |
| 6 | 刘洁, 董献洲, 韩维, 等. 采用牛顿迭代保辛伪谱算法的舰载机甲板路径规划[J]. 浙江大学学报(工学版), 2020, 54 (9): 1827- 1838. |
| LIU J , DONG X Z , HAN W , et al. Trajectory planning for carrier aircraft on deck using Newton symplectic pseudo-spectral method[J]. Journal of Zhejiang University (Engineering Science), 2020, 54 (9): 1827- 1838. | |
| 7 | 薛均晓, 孔祥燕, 郭毅博, 等. 基于深度强化学习的舰载机动态避障方法[J]. 计算机辅助设计与图形学学报, 2021, 33 (7): 1102- 1112. |
| XUE J X , KONG X Y , GUO Y B , et al. Dynamic obstacle avoidance method for carrier aircraft based on deep reinforcement learning[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33 (7): 1102- 1112. | |
| 8 | 郑茂, 颜世伟, 初秀民, 等. 舰载机典型调运方案推演与时序优化[J]. 中国舰船研究, 2021, 16 (3): 1- 8.1-8, 23 |
| ZHENG M , YAN S W , CHU X M , et al. Handling scheme simulation and scheduling optimizationfor carrier-borne aircraft[J]. Chinese Journal of Ship Research, 2021, 16 (3): 1- 8.1-8, 23 | |
| 9 | 张智, 林圣琳, 夏桂华, 等. 舰载机甲板调运过程避碰路径规划研究[J]. 哈尔滨工程大学学报, 2014, 35 (1): 9- 15. |
| ZHANG Z , LIN S L , XIA G H , et al. Collision avoidance path planning foran aircraft in scheduling process on deck[J]. Journal of Harbin Engineering University, 2014, 35 (1): 9- 15. | |
| 10 | WANG X W , PENG H J , LIU J , et al. Optimal control based coordinated taxiing path planning and tracking for multiple carrier aircraft on flight deck[J]. Defence Technology, 2022, 18 (2): 238- 248. |
| 11 | TZAFESTAS S G . Mobile robot control and navigation: a global overview[J]. Journal of Intelligent & Robotic Systems, 2018, 91 (1): 35- 58. |
| 12 | SARIFF N, BUNIYAMIN N. An overview of autonomous mobile robot path planning algorithms[C]//Proc. of the IEEE 4th Student Conference on Research and Development, 2006: 183-188. |
| 13 | TEIMOORI H , SAVKIN A V . A biologically inspired method for robot navigation in a cluttered environment[J]. Robotica, 2010, 28 (5): 637- 648. |
| 14 | YU M H , XUE G , FAN G W , et al. Trajectory planning and tracking for carrier aircraft-tractor system based on autonomous and cooperative movement[J]. Mathematical Problems in Engineering, 2020, 2020, 6531984. |
| 15 | FAN K C , LUI P C . Solving find path problem in mapped environments using modified A* algorithm[J]. IEEE Trans.on Systems, Man, and Cybernetics, 1994, 24 (9): 1390- 1396. |
| 16 | WARREN C W. Fast path planning using modified A* method[C]//Proc. of the IEEE International Conference on Robotics and Automation, 1993: 662-667. |
| 17 | 孙小雷, 齐乃明, 董程, 等. 无人机任务分配与航迹规划协同控制方法[J]. 系统工程与电子技术, 2010, 37 (12): 2772- 2776. |
| SUN X L , QI N M , DONG C , et al. Cooperative control algorithm of task assignment and path planning for multiple UAVs[J]. Systems Engineering and Electronics, 2010, 37 (12): 2772- 2776. | |
| 18 | 张哲, 吴剑, 代冀阳, 等. 基于改进A* Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41 (7): 254- 264. |
| ZHANG Z , WU J , DAI J Y , et al. Fast penetration path planning for stealth UAV based on improved A* Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (7): 254- 264. | |
| 19 | WU Y , QU X J . Path planning for taxi of carrier aircraft launching[J]. Science China Technological Sciences, 2013, 56 (6): 1561- 1570. |
| 20 | XUE J X, KONG X Y, DONG B W, et al. Multi-agent path planning based on MPC and DDPG[EB/OL]. [2022-01-05]. https://arxiv.org/abs/2102.13283v1. |
| 21 | YE B Q, ZHAO M F, WANG Y. Research of path planning method for mobile robot based on artificial potential field[C]//Proc. of the International Conference on Multimedia Technology, 2011: 3192-3195. |
| 22 | HUANG W H , FAJEN B R , FINK J R , et al. Visual navigation and obstacle avoidance using a steering potential function[J]. Robotics and Autonomous Systems, 2006, 54 (4): 288- 299. |
| 23 | YAO Z X, YAO Z Y, WANG W H, et al. The enemy air-threat prediction based aircraft real-time path planning for offshore combat[C]//Proc. of the IEEE 8th International Conference on Underwater System Technology: Theory and Applications, 2018. |
| 24 | LIU J , HAN W , WANG X W , et al. Research on cooperative trajectory planning and tracking problem for multiple carrier aircraft on the deck[J]. IEEE Systems Journal, 2019, 14 (2): 3027- 3038. |
| 25 | WU Y , HU N , QU X J . A general trajectory optimization method for aircraft taxiing on flight deck of carrier[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233 (4): 1340- 1353. |
| 26 |
崔凯凯, 韩维, 刘玉杰, 等. 基于DM-DSC的舰载机着舰自动复飞控制算法[J]. 北京航空航天大学学报, 2022,
doi: 10.13700/j.bh.1001-5965.2021.0362 |
|
CUI K K , HAN W , LIU Y J , et al. Automatic wave-off control method for carrier aircraft based on DM-DSC[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022,
doi: 10.13700/j.bh.1001-5965.2021.0362 |
|
| 27 | 乔鸿, 徐忠达, 佘智勇. 基于Radau伪谱法的临近空间飞行器助推-滑翔段轨迹优化仿真[J]. 战术导弹技术, 2017, 43 (4): 47- 51. |
| QIAO H , XU Z D , SHE Z Y . Boost-glide trajectory optimization for near space vehicle using radau pseudospectral method[J]. Tactical Missile Technology, 2017, 43 (4): 47- 51. | |
| 28 | 蔡伟伟. 空天飞行器轨迹规划与控制研究[D]. 长沙: 国防科学技术大学, 2015. |
| CAI W W. Trajectory planning and control for aerospace vehicles[D]. Changsha: National University of Defense Technology, 2015. |
| [1] | Xiaofeng LYU, Dongze YANG, Ling MA. Optimal design of modular ammunition scheduling scheme for carrier-based aircraft [J]. Systems Engineering and Electronics, 2023, 45(2): 465-471. |
| [2] | Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm [J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. |
| [3] | Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. |
| [4] | Yong ZHANG, Changjiu LI, Xichao SU, Rongwei CUI. Maintenance task scheduling of carrier-based aircraft fleet in hangar based on HTLBO algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2858-2868. |
| [5] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [6] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [7] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [8] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [9] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [10] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [11] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [12] | Rongwei CUI, Wei HAN, Xichao SU, Liguo WANG, Yujie LIU. Integrated optimization of carrier-based aircraft flight deck operations scheduling and resource configuration for pre-flight preparation stage [J]. Systems Engineering and Electronics, 2021, 43(7): 1884-1893. |
| [13] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| [14] | Jianguo GUO, Yalu SU. Control system design of adaptive dynamic programming for hypersonic vehicle [J]. Systems Engineering and Electronics, 2021, 43(6): 1628-1635. |
| [15] | Bing WAN, Wei HAN, Yong LIANG, Fang GUO. Optimization algorithm of carrier-based aircraft sortie departure scheduling [J]. Systems Engineering and Electronics, 2021, 43(12): 3624-3634. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||