Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (2): 513-520.doi: 10.12305/j.issn.1001-506X.2023.02.23
• Guidance, Navigation and Control • Previous Articles
Energy-efficient path planning method for robots based on improved A* algorithm
Haojie ZHANG1,*, Yudong ZHANG1, Rongmin LIANG1, Tiantian YANG2
- 1. Key Laboratory of Knowledge Automation for Industrial Processes of Ministry of Education, School of Automation and Electrical Engineering, University of Science and Technology Beijing, Beijing 100083, China
2. Weapon Technology Innovation Center, Ordnance Science and Research Academy of China, Beijing 100089, China
-
Received:2021-07-01Online:2023-01-13Published:2023-02-04 -
Contact:Haojie ZHANG
CLC Number:
Cite this article
Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm[J]. Systems Engineering and Electronics, 2023, 45(2): 513-520.
share this article
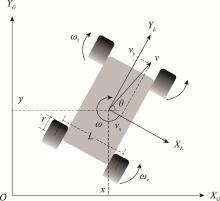
Fig.1
Kinematic constraints of four-wheel differential drive robot"

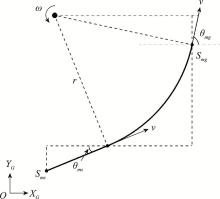
Fig.2
A motion primitive's kinematic analysis"


Fig.3
Some energy consumption motion primitives for state (0, 0, 0)"

Fig.4
Platform of mobile robot"
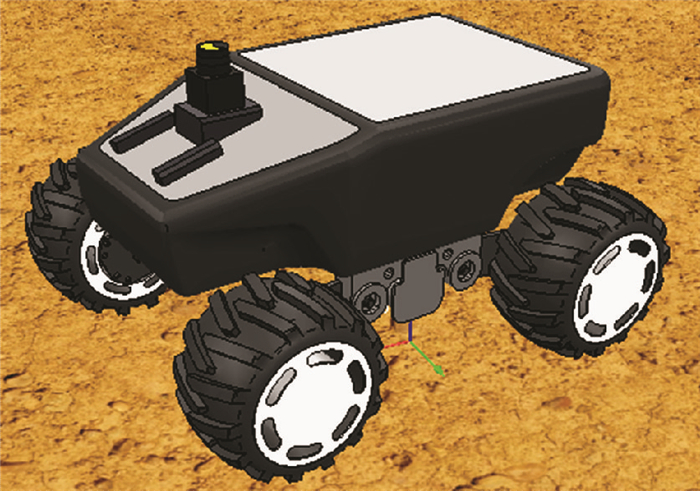
Table 1
Performance parameters of robot platform"
| 参数名称 | 数值 |
| 车轮半径r/m | 0.16 |
| 轮距L/m | 0.8 |
| 电机反电动势系数Kb/(V/(r·min-1)) | 0.023 |
| 电机电枢电阻Ra/Ω | 0.71 |
| 电机减速比g | 38.3 |
| 电池电压Us/V | 24 |
| 单个运动基元运行总时间T/s | 1 |
| 栅格分辨率Re/m | 0.1 |
| 权重因子e/J | 1 000 |
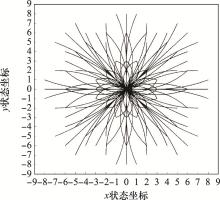
Fig.5
Energy consumption motion primitive set for position (0, 0)"
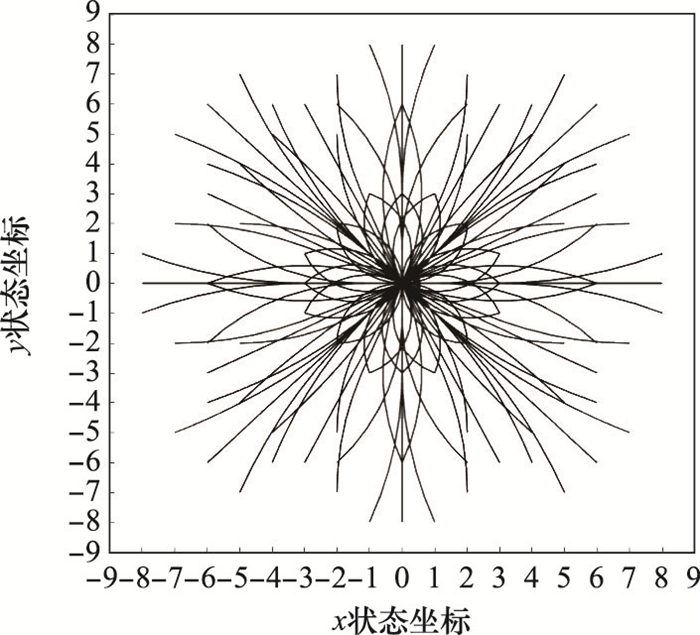
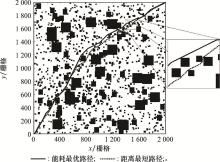
Fig.6
Comparison of path planning results"
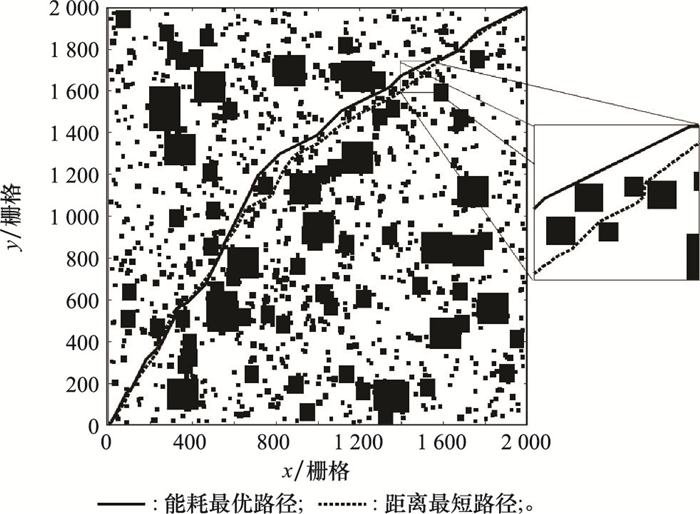
Table 2
Data comparison of test results"
| 地图大小 | 算法种类 | 规划时间/s | 路径长度/m | 路径能耗/J |
| 1 000×1 000 | 本文方法 | 1.69 | 146.22 | 138 626 |
| A*算法 | 2.69 | 145.23 | 194 510 | |
| ECA*算法 | 2.15 | 148.27 | 164 842 | |
| 1 500×1 500 | 本文方法 | 3.44 | 221.06 | 208 184 |
| A*算法 | 4.68 | 219.69 | 289 588 | |
| ECA*算法 | 3.97 | 225.79 | 239 741 | |
| 2 000×2 000 | 本文方法 | 4.22 | 293.64 | 275 714 |
| A*算法 | 7.29 | 292.08 | 382 259 | |
| ECA*算法 | 5.64 | 296.15 | 317 325 |

Fig.7
Simulation scene of roadway"


Fig.8
Energy-efficient path"
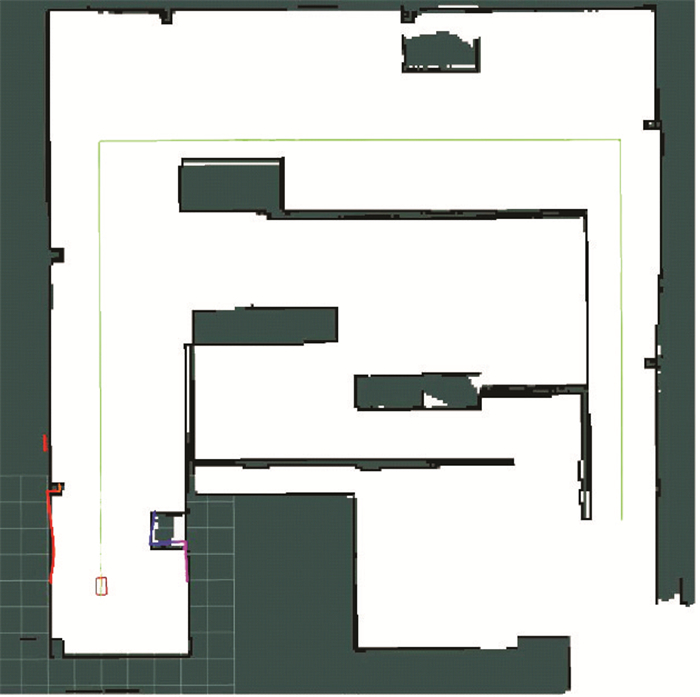

Fig.9
Distance optimal path"

Table 3
Test result in simulation scene"
| 算法种类 | 路径长度/m | 路径能耗/J |
| 本文方法 | 51.8 | 48 831 |
| A*算法 | 41.2 | 54 452 |
| 1 | SALONI W. The role of autonomous unmanned ground vehicle technologies in defense application[R]. New York: Aerospace & Defense Technology Magazine, 2020. |
| 2 | LEONARDB,TOMA,HENNINGS.State of the art-automated micro-vehicles for urban logistics[J].International Federation of Automatic Control,2019,52(13):2455-2462. |
| 3 | SANTOS L C, SANTOS F N, PIRES E J S, et al. Path planning for ground robots in agriculture: a short review[C]//Proc. of the IEEE International Conference on Autonomous Robot Systems and Competitions, 2020: 61-66. |
| 4 | ALGIRDASV V,OLEGASC,VADIMV.Motion and energy efficiency parameters of the unmanned ground vehicle[J].Solid State Phenomena,2015,220,934-939. |
| 5 |
DIK C,LIUZ Q,WANW H,et al.Geospatial technologies for Chang'e-3 and Chang'e-4 lunar rover missions[J].Geo-spatial Information Science,2020,23(1):87-97.
doi: 10.1080/10095020.2020.1718002 |
| 6 | ZHANGZ W,WUL H,ZHANGW Q,et al.Energy-efficient path planning for a single-load automated guided vehicle in a manufacturing workshop[J].Computers & Industrial Engineering,2021,158,107397. |
| 7 | RAPPAPORT M. Energy-aware mobile robot exploration with adaptive decision thresholds[C]//Proc. of the 47th International Symposium on Robotics, 2016: 236-243. |
| 8 |
VALIAOTSE,SELLR.Energy efficiency profiles for unmanned ground vehicles[J].Proceedings of the Estonian Academy of Sciences,2019,68(1):55-65.
doi: 10.3176/proc.2019.1.04 |
| 9 | SHARIF A, LAHIRU H M, HERATH S, et al. Energy efficient path planning of hybrid fly-drive robot using A* algorithm[C]//Proc. of the 15th International Conference on Informatics in Control, Automation and Robotics, 2018: 201-210. |
| 10 | HILL R B. Design of high-speed robots with drastically reduced energy consumption[D]. France: Centrale Nontes, 2019. |
| 11 |
ROWEN C,ROSSR S.Optimal grid-free path planning across arbitrarily contoured terrain with anisotropic friction and gravity effects[J].IEEE Trans.on Robotics and Automation,1990,6(5):540-553.
doi: 10.1109/70.62043 |
| 12 | ZHANGH J,ZHANGY D,YANGT T.A survey of energy-efficient motion planning for wheeled mobile robots[J].Industrial Robot: the International Journal of Robotics Research and Application,2020,4(47):607-621. |
| 13 |
SUNZ,REIFJ H.On finding energy-minimizing paths on terrains[J].IEEE Trans.on Robotics,2005,21(1):102-114.
doi: 10.1109/TRO.2004.837232 |
| 14 | SAAD M, SALAMEH A I, ABDALLAH S. Energy-efficient shortest path planning on uneven terrains: a composite routing metric approach[C]//Proc. of the 19th International Symposium on Signal Processing and Information Technology, 2019. |
| 15 |
SAADM,SALAMEHA I,ABDALLAHS,et al.A compo-site metric routing approach for energy-efficient shortest path planning on natural terrains[J].Applied Sciences,2021,11(15):6939.
doi: 10.3390/app11156939 |
| 16 | 殷建军,董文龙,梁利华,等.复杂环境下农业机器人路径规划优化方法[J].农业机械学报,2019,50(5):17-22. |
| YINJ J,DONGW L,LIANGL H,et al.Optimization method of agricultural robot path planning in complex environment[J].Transactions of the Chinese Society for Agricultural Machinery,2019,50(5):17-22. | |
| 17 | ZAKHAROV K, SAVELIEV A, SIVCHENKO O. Energy-efficient path planning algorithm on three-dimensional large-scale terrain maps for mobile robots[C]//Proc. of the 5th International Conference on Interactive Collaborative Robotics, 2020: 319-330. |
| 18 | ZHANGZ W,WUL H,ZHANGW Q,et al.Energy-efficient path planning for a single-load automated guided vehicle in a manufacturing workshop[J].Computers & Industrial Engineering,2021,158,107397. |
| 19 |
ZHANGX L,HUANGY,RONGY M,et al.Optimal trajectory planning for wheeled mobile robots under localization uncertainty and energy efficiency constraints[J].Sensors,2021,21(2):335.
doi: 10.3390/s21020335 |
| 20 |
SANGEETHAV,KRISHANKUMARR,RAVICHANDRANK S,et al.Energy-efficient green ant colony optimization for path planning in dynamic 3D environments[J].Soft Computing,2021,25,4749-4769.
doi: 10.1007/s00500-020-05483-6 |
| 21 | SINGH V, BARAI R K, MANDAL P. Real-time heuristic search based minimum energy path planning of wheeled mobile robot[C]//Proc. of the Conference on Advances in Robotics, 2015: 171-177. |
| 22 |
HAUSLERA J,SACCONA,AGUIARA P,et al.Energy-optimal motion planning for multiple robotic vehicles with collision avoidance[J].IEEE Trans.on Control Systems Technology,2016,24(3):867-883.
doi: 10.1109/TCST.2015.2475399 |
| 23 |
孙鹏耀,黄炎焱,潘尧.基于改进势场法的移动机器人路径规划[J].兵工学报,2020,41(10):2106-2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
SUNP Y,HUANGY Y,PANY.Path planning of mobile robots based on improved potential field algorithm[J].Acta Armamentarii,2020,41(10):2106-2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
| 24 |
SHINJ,KWAKD,KWAKK.Model predictive path planning for an autonomous ground vehicle in rough terrain[J].International Journal of Control, Automation and Systems,2021,19,2224-2237.
doi: 10.1007/s12555-020-0267-2 |
| 25 |
GUPTAN,ORDONEZC,COLLINSE G.Dynamically feasible, energy efficient motion planning for skid-steered vehicles[J].Autonomous Robots,2017,41(2):453-471.
doi: 10.1007/s10514-016-9550-8 |
| 26 | JARAMILLO-MORALESM F,DOGRUS,GOMEZ-MENDOZAJ B,et al.Energy estimation for differential drive mobile robots on straight and rotational trajectories[J].International Journal of Advanced Robotic Systems,2020,17(2):1729881420909654. |
| 27 | XIEL,HENKELC,STOLK,et al.Power-minimization and energy-reduction autonomous navigation of an omnidirectional mecanum robot via the dynamic window approach local trajectory planning[J].International Journal of Advanced Robotic Systems,2018,15(1):1729881418754563. |
| 28 |
VISCAM,POWELLR,GAOY,et al.Deep meta-learning energy-aware path planner for unmanned ground vehicles in unknown terrains[J].IEEE Access,2022,10,30055-30068.
doi: 10.1109/ACCESS.2022.3155161 |
| 29 | AJANOVICZ,STOLZM,HORNM.Energy-efficient driving in dynamic environment: global optimal MPC-like motion planning framework[M].Berlin:Springer,2018. |
| 30 | 张浩杰,苏治宝,HERNANDEZD E,等.移动机器人低能耗最优路径规划方法[J].农业机械学报,2018,49(9):19-26. |
| ZHANGH J,SUZ B,HERNANDEZD E,et al.Energy optimal path planning for mobile robots based on improved AD* algorithm[J].Transactions of the Chinese Society for Agricultural Machinery,2018,49(9):19-26. | |
| 31 | CSERVENAKA.Simulation and modeling of a DC motor used in a mobile robot[J].Academic Journal of Manufacturing Engineering,2020,18(4):183-190. |
| 32 | 高德欣,程捷,白剑飞.最小二乘法在电机测试分析中的应用[J].微电机,2017,50(3):9-13. |
| GAOD X,CHENGJ,BAIJ F.Application of least square in test and analysis of motor[J].Micromotors,2017,50(3):9-13. | |
| 33 | PIVTORAIKO M, KELLY A. Kinodynamic motion planning with state lattice motion primitives[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 2172-2179. |
| 34 |
GANGANATHN,CHENGC T,ChiK T.A constraint-aware heuristic path planner for finding energy-efficient paths on uneven terrains[J].IEEE Trans.on Industrial Informatics,2015,11(3):601-611.
doi: 10.1109/TII.2015.2413355 |
| 35 | ZHANG H J, BUTZKE J, LIKHACHEV M. Combining global and local planning with guarantees on completeness[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2012: 4500-4506. |
| [1] | Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. |
| [2] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [3] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [4] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [5] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [6] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [7] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [8] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [9] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| [10] | Wenming WANG, Jialu DU. Agent path planning based on regular hexagon grid JPS algorithm [J]. Systems Engineering and Electronics, 2021, 43(12): 3635-3642. |
| [11] | Yanan LI, Haibin HUANG, Liangming CHEN, Yufei ZHUANG, Xiaoli WANG. Energy-optimal three-dimensional path planning for AUV under changing ocean current environment [J]. Systems Engineering and Electronics, 2021, 43(12): 3667-3674. |
| [12] | Wengang LI, Liujiang WANG, Dexiang FANG, Yuwei LI, Jun Huang. Path planning algorithm combining A* with DWA [J]. Systems Engineering and Electronics, 2021, 43(12): 3694-3702. |
| [13] | Yao HAN, Shaohua LI. UAV path planning based on improved artificial potential field [J]. Systems Engineering and Electronics, 2021, 43(11): 3305-3311. |
| [14] | Daidai CHEN, Wanyou LI. Local path planning algorithm for USV with towed cable [J]. Systems Engineering and Electronics, 2020, 42(9): 1988-1994. |
| [15] | Quanxian ZHANG, Bin ZENG, Houpu LI. Underway replenishment path planning method for distributed naval warfare under the influence of sea conditions [J]. Systems Engineering and Electronics, 2020, 42(10): 2312-2319. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||