Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (12): 3667-3674.doi: 10.12305/j.issn.1001-506X.2021.12.30
• Guidance, Navigation and Control • Previous Articles Next Articles
Energy-optimal three-dimensional path planning for AUV under changing ocean current environment
Yanan LI1, Haibin HUANG1, Liangming CHEN2, Yufei ZHUANG1,*, Xiaoli WANG1
- 1. School of Information Science and Engineering, Harbin Institute of Technology(Weihai), Weihai 264209, China
2. School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore 639788, Singapore
-
Received:2020-08-13Online:2021-11-24Published:2021-11-30 -
Contact:Yufei ZHUANG
CLC Number:
Cite this article
Yanan LI, Haibin HUANG, Liangming CHEN, Yufei ZHUANG, Xiaoli WANG. Energy-optimal three-dimensional path planning for AUV under changing ocean current environment[J]. Systems Engineering and Electronics, 2021, 43(12): 3667-3674.
share this article
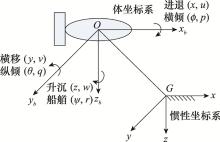
Fig.1
Reference coordinate system and six degrees of freedom movement of AUV"
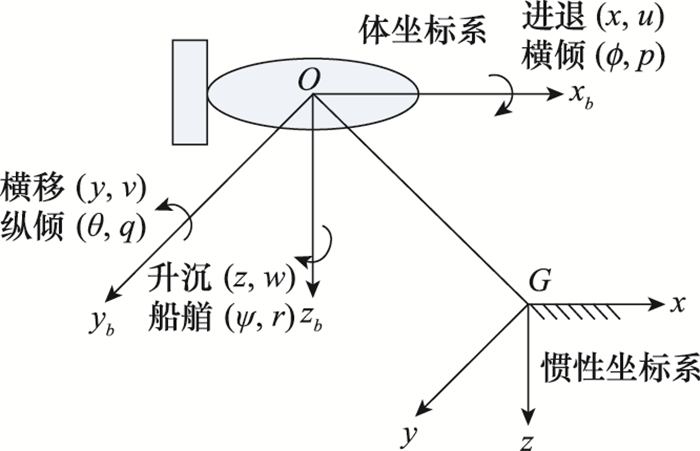
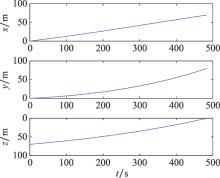
Fig.2
Energy-optimal path of AUV in presence of ocean current"
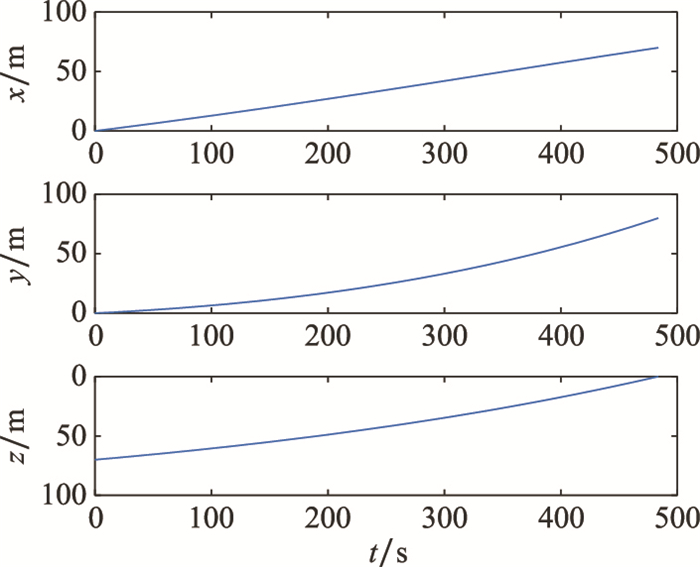
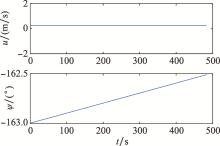
Fig.3
Velocity and yaw angle changing curve of AUV based on optimal control in presence ocean current"
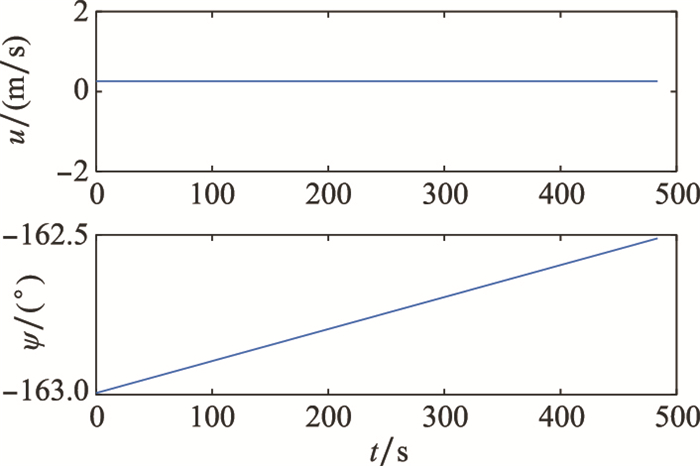
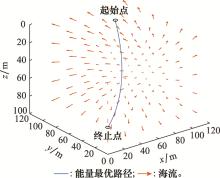
Fig.4
Energy-optimal 3D AUV path in presence of ocean current"
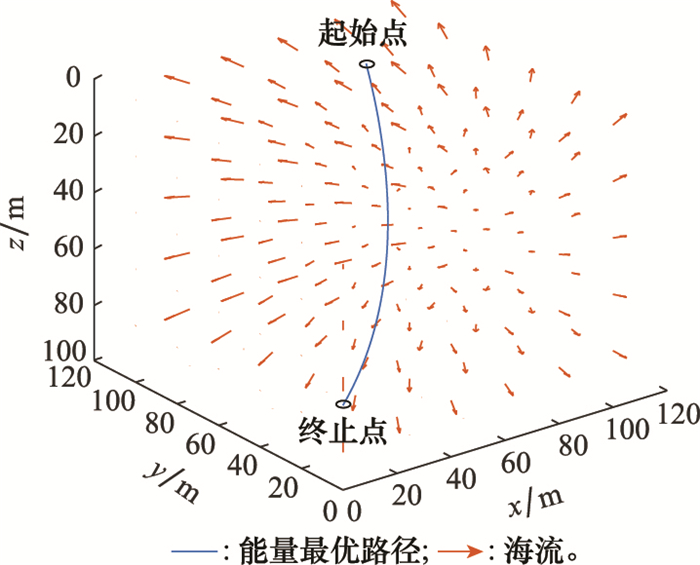
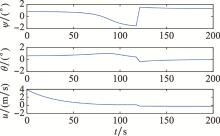
Fig.5
AUV yaw angle, pitch angle and velocity changing curve based on negative feedback under ocean current"

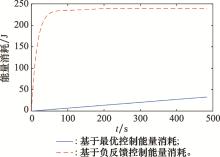
Fig.6
Comparison of AUV energy consumption based on negative feedback controller and optimal control"
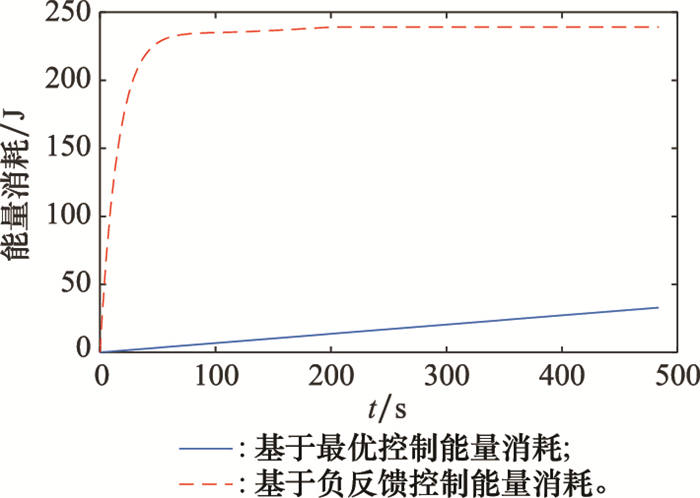
Table 1
Calculation results of control quantities under different currents"
| 控制量 | 海流/(m/s) | |||
| vc | 5vc | 10vc | 20vc | |
| 起点海流大小/(m/s) | 0.14 | 0.70 | 1.40 | 2.80 |
| 终点海流大小/(m/s) | 0.24 | 1.19 | 2.38 | 4.75 |
| 海流最大值/(m/s) | 0.28 | 1.38 | 2.76 | 5.52 |
| 航速/(m/s) | 0.26 | 1.30 | 2.61 | 5.21 |
| 航行终止时间/s | 483.54 | 96.71 | 48.35 | 24.17 |
| 最优控制消耗能量/J | 32.69 | 163.44 | 329.36 | 656.07 |
| 负反馈控制消耗能量/J | 237.12 | 2 376.00 | 8 904.60 | 35 147.00 |
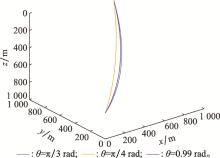
Fig.7
3D AUV energy-optimal path at different pitch angles"
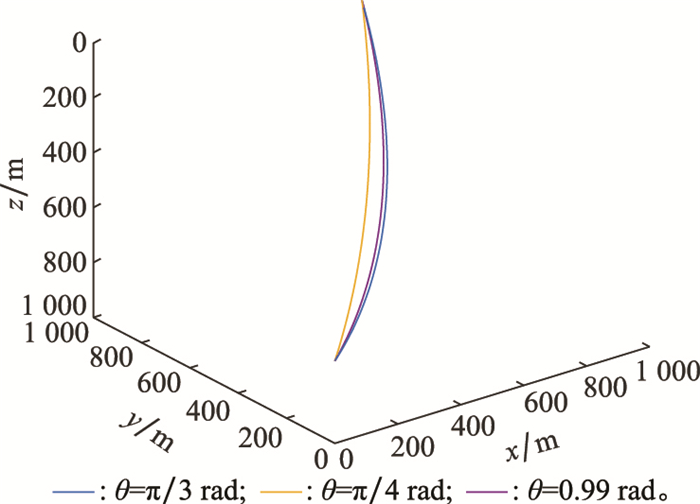
Table 2
Calculation results of control quantities at different pitch angles under large depths"
| 控制量 | 俯仰角/rad | ||
| π/3 | π/4 | 0.99 | |
| 航速/(m/s) | 2.61 | 5.80 | 2.95 |
| 艏向角/rad | -156.71 | 38.34 | -162.93 |
| 航行终止时间/s | 483.55 | 208.89 | 419.46 |
| 能量/J | 3 293.99 | 7 027.06 | 3 650.35 |
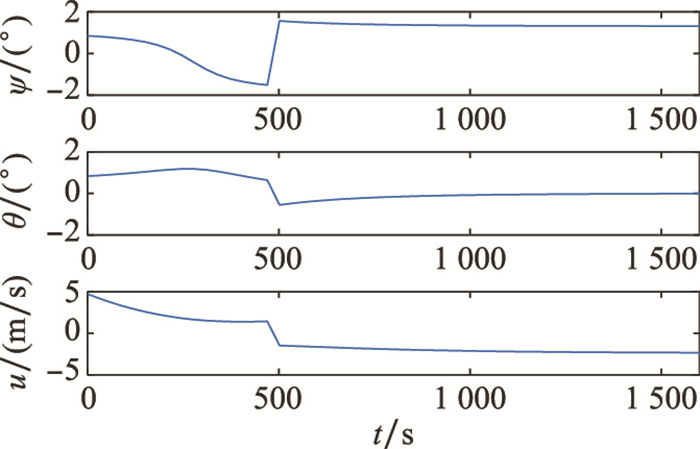
Fig.8
AUV yaw angle, pitch angle and velocity changing curve based on negative feedback under large depth"
| 1 | 李娟, 张秉健, 杨莉娟. 未知环境下基于感知自适应的多AUV目标搜索算法[J]. 系统工程与电子技术, 2018, 40 (8): 176- 182. |
| LI J , ZHANG B J , YANG L J . Multi-AUV target search algorithm with cognitive-based adaptive optimization in unknown environment[J]. Systems Engineering and Electronics, 2018, 40 (8): 176- 182. | |
| 2 | TENG M , LI Y , ZHANG Y X , et al. An AUV localization and path planning algorithm for terrain-aided navigation[J]. ISA Transactions, 2020, 103 (4): 215- 227. |
| 3 | KHAN M T R, JEMBRE Y Z, AHMED S H, et al. Data freshness based AUV path planning for UWSN in the internet of underwater things[C]//Proc. of the IEEE Global Communications Conference, 2020. |
| 4 | CHEN S H, CHEN Y G, ZHU J Y, et al. Path-planning analysis of AUV-aided mobile data collection in UWA cooperative sensor networks[C]//Proc. of the IEEE International Conference on Signal Processing, Communications and Computing, 2020. |
| 5 | YAN Z P , ZHANG J Z , TANG J L . Path planning for autonomous underwater vehicle based on an enhanced water wave optimization algorithm-science direct[J]. Mathematics and Compu-ters in Simulation, 2021, 181 (3): 192- 241. |
| 6 |
FERNANDES V H , RODRIGUES D D , NETO A A , et al. Modeling positional uncertainty for hydrographic surveys with AUV[J]. Journal of Surveying Engineering, 2019, 145 (1): 04018014.
doi: 10.1061/(ASCE)SU.1943-5428.0000269 |
| 7 |
FILARETOV V , YUKHIMETS D . The method of path planning for AUV-group moving in desired formation in unknown environment with obstacles[J]. IFAC-PapersOnLine, 2020, 53 (2): 14650- 14655.
doi: 10.1016/j.ifacol.2020.12.1475 |
| 8 |
CAO X , CHEN L , GUO L Q , et al. AUV global security path planning based on a potential field bio-inspired neural network in underwater environment[J]. Intelligent Automation and Soft Computing, 2021, 27 (2): 391- 407.
doi: 10.32604/iasc.2021.01002 |
| 9 | YANG Y , XIAO Y , LI T S . A survey of autonomous underwater vehicle formation: performance, formation control, and communication capability[J]. IEEE Communications Surveys & Tutorials, 2021, 23 (2): 815- 841. |
| 10 |
GALLIMORE E , TERRILL E , PIETRUSZKA A , et al. Magnetic survey and autonomous target reacquisition with a scalar magnetometer on a small AUV[J]. Journal of Field Robotics, 2020, 37 (7): 1246- 1266.
doi: 10.1002/rob.21955 |
| 11 |
HERNANDEZ J D , VALLICROSA G , VIDAL E , et al. Online 3D path planning for close-proximity surveying with AUVs[J]. IFAC-PapersOnLine, 2015, 48 (2): 50- 55.
doi: 10.1016/j.ifacol.2015.06.009 |
| 12 | TAO W, YAN S K, PAN F, et al. AUV path planning based on improved genetic algorithm[C]// Proc. of the 5th International Conference on Automation, Control and Robotics Engineering, 2020: 220-224. |
| 13 |
WANG X M , ZERR B , HELENE T , et al. Pattern formation of multi-AUV systems with the optical sensor based on displacement-based formation control[J]. International Journal of Systems Science, 2020, 51 (2): 348- 367.
doi: 10.1080/00207721.2020.1716096 |
| 14 | JOHANSEN T A, ZOLICH A, HANSEN T, et al. Unmanned aerial vehicle as communication relay for autonomous underwater vehicle-field tests[C]//Proc. of the IEEE Globecom Workshops, 2014: 1469-1474. |
| 15 | HU T , AHMAD I , ALAMGIR M S M , et al. 3D optimal surveillance trajectory planning for multiple UAVs by using particle swarm optimization with surveillance area priority[J]. IEEE Access, 2020, 8, 2169- 3536. |
| 16 | GARAU B , BONET M , ALVAREZ A , et al. Path planning for autonomous underwater vehicles in realistic oceanic current fields: application to gliders in the western mediterranean sea[J]. Journal of Maritime Research, 2009, 6 (2): 5- 22. |
| 17 | HUYNH V T, DUNBABIN M, SMITH R N. Convergence-guaranteed time-varying RRT path planning for profiling floats in 4-Dimensional flow[C]//Proc. of the Australian Conference on Robotics and Automation, 2014. |
| 18 | PETRES C, PAILHAS Y, PETILLOT Y, et al. Underwater path planing using fast marching algorithms[C]//Proc. of the IEEE Europe Oceans, 2005: 814-819. |
| 19 |
KULKARNI C S , LERMUSIAUX P F J . Three-dimensional time-optimal path planning in the ocean[J]. Ocean Modelling, 2020, 152, 101644.
doi: 10.1016/j.ocemod.2020.101644 |
| 20 | WITT J, DUNBABIN M. Go with the flow: optimal AUV path planning in coastal environments[C]//Proc. of the Australian Conference on Robotics and Automation, 2008. |
| 21 |
LOLLA T , HALEY P J , LERMUSIAUX P F J , et al. Path planning in multi-scale ocean flows: coordination and dynamic obstacles[J]. Ocean Modelling, 2015, 94, 46- 66.
doi: 10.1016/j.ocemod.2015.07.013 |
| 22 |
SUBRAMANI D N , LERMUSIAUX P F J . Energy-optimal path planning by stochastic dynamically orthogonal level-set optimization[J]. Ocean Modelling, 2016, 100, 57- 77.
doi: 10.1016/j.ocemod.2016.01.006 |
| 23 | BAI X S , YAN W S , CAO M . Clustering-based algorithms for multi-vehicle task assignment in a time-invariant drift field[J]. IEEE Robotics & Automation Letters, 2017, 2 (4): 2166- 2173. |
| 24 | ZHAO Y J , ZHENG Z , LIU Y . Survey on computational-intelligence-based UAV path planning[J]. Knowledge-Based Systems, 2018, 158 (6): 54- 64. |
| 25 | KUMAR R P , DASGUPTA A , KUMAR C S . Real-time optimal motion planning for autonomous underwater vehicles[J]. Ocean Engineering, 2005, 32 (11/12): 1431- 1447. |
| 26 | KIRK D E . Optimal control theory: an introduction[M]. New York: Dover Publications, 2004: 320- 323. |
| 27 | 李传江, 马广富. 最优控制[M]. 哈尔滨: 科学出版社, 2011: 116- 118. |
| LI C J , MA G F . Optimal control[M]. Harbin: Science Press, 2011: 116- 118. | |
| 28 | 李身铎. 长江口潮流的垂直结构[J]. 海洋与湖沼, 1985, 16 (4): 261- 273. |
| LI S D . On the vertical structure of tidal currents in shallow water near the changjiang river estuary[J]. Oceanologia et Limnologia Sinica, 1985, 16 (4): 261- 273. | |
| 29 | 周赫雄. 复杂海洋环境影响下UUV远程航海能耗优化的路径规划研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. |
| ZHOU H X. Research on path planning of unmanned underwater vehicle for long-duration missions based on energy consumption optimization in complex ocean environment[D]. Harbin: Harbin Engineering University, 2017. | |
| 30 |
JACOBSON J , COHEN P , NASR A , et al. DeepStar 11304: laying the groundwork for AUV standards for deepwater fields[J]. Marine Technology Society Journal, 2013, 47 (3): 13- 18.
doi: 10.4031/MTSJ.47.3.9 |
| 31 |
LI D D , JI D X , LIU J , et al. A multi-model EKF integrated navigation algorithm for deep water AUV[J]. International Journal of Advanced Robotic Systems, 2016, 13 (1): 1- 15.
doi: 10.5772/62058 |
| [1] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [2] | Yongqi GAO, Weiqiang MA, Linsen ZHANG, Peng WANG, Miao ZHAO. Distributed multi-AUVs cooperative search method [J]. Systems Engineering and Electronics, 2022, 44(5): 1670-1676. |
| [3] | Shiwei FAN, Ya ZHANG, Qiang HAO, Pan JIANG, Fei YU. Cooperative positioning and error estimation algorithm based on factor graph [J]. Systems Engineering and Electronics, 2021, 43(2): 499-507. |
| [4] | LI Juan, ZHANG Bingjian, YANG Lijuan, WANG Mengdi. Multi-AUV target search algorithm with cognitive based adaptive optimization in unknown environment#br# [J]. Systems Engineering and Electronics, 2018, 40(8): 1839-1845. |
| [5] | YAN Wei-sheng, QI Bei-bei, GAO Jian, LI Yong. Homing guidance algorithm for an autonomous underwater vehicle based on dipolar field [J]. Systems Engineering and Electronics, 2016, 38(4): 902-908. |
| [6] | WANG Lei, CHENG Xiang-hong, RAN Chang-yan, CHEN Hong-mei, HU Jie. Improved multiple model algorithm based on Bayesian network for AUV integrated navigation [J]. Systems Engineering and Electronics, 2015, 37(4): 901-906. |
| [7] | LIU Ming-yong, DONG Ting-ting, ZHANG Li-chuan. Underwater SLAM navigation algorithm based on random beacons [J]. Systems Engineering and Electronics, 2015, 37(12): 2830-2834. |
| [8] | YAN Wei-sheng, ZUO Lei, CUI Rong-xin. Model based adaptive coverage control for multiple autonomous underwater vehicles [J]. Systems Engineering and Electronics, 2015, 37(11): 2574-2578. |
| [9] | YANG Yong-peng, ZHAO Yu-xin, HAO Yan-ling, DU Hang-yuan. Decoupling control system for AUV hovering nearsurface [J]. Journal of Systems Engineering and Electronics, 2012, 34(3): 572-577. |
| [10] | LIU Yu. Autonomous underwater vehicle control based on adaptive backstepping method [J]. Journal of Systems Engineering and Electronics, 2011, 33(3): 638-642. |
| [11] | HUANG Yu, HAO Yan-ling. Novel measurement method of AUV ground speed based on underwater geomagnetic anomaly localization [J]. Journal of Systems Engineering and Electronics, 2011, 33(10): 2306-2310. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||