Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (5): 1670-1676.doi: 10.12305/j.issn.1001-506X.2022.05.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Distributed multi-AUVs cooperative search method
Yongqi GAO, Weiqiang MA*, Linsen ZHANG, Peng WANG, Miao ZHAO
- College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China
-
Received:2021-05-28Online:2022-05-01Published:2022-05-16 -
Contact:Weiqiang MA
CLC Number:
Cite this article
Yongqi GAO, Weiqiang MA, Linsen ZHANG, Peng WANG, Miao ZHAO. Distributed multi-AUVs cooperative search method[J]. Systems Engineering and Electronics, 2022, 44(5): 1670-1676.
share this article

Fig.1
Schematic of AUV movement directions"


Fig.2
Schematic of search path"

Table 1
Distributed collaborative search model parameters"
| 参数符合 | 参数意义 | 值 |
| pd | 传感器探测概率 | 0.96 |
| pf | 传感器虚警概率 | 0.04 |
| p0 | 目标存在阈值 | 0.75 |
| gn | 高斯分布峰值 | 0.324 8 |
| σ2 | 高斯分布方差 | 0.49 |
| τ | 不确定度递减因子 | 0.1 |
| M | 充分大正数 | 1 000 |
| H | 较大协调信息素 | 5 |
| L | 较小协调信息素 | 1 |

Fig.3
Probability distribution diagram of initial target existence"

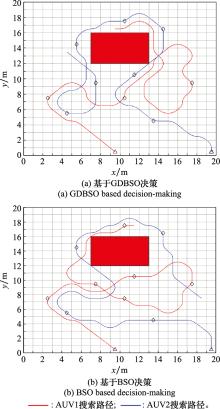
Fig.4
Schematics diagram of collaborative search paths based on different decision-making"

Table 2
Comparison of search results for different algorithms"
| 算法 | 寻得目标数量/个 | 每步决策时间/s |
| GDBSO | 8.80 | 0.704 0 |
| BSO | 8.24 | 0.924 9 |
Table 3
Impact of influence coefficient for subobjective function"
| 子目标函数影响系数 | 寻得目标数量/个 |
| k1=0.2、k2=0.6、k3=0.2 | 8.38 |
| k1=0.3、k2=0.5、k3=0.2 | 8.60 |
| k1=0.4、k2=0.4、k3=0.2 | 8.80 |
| k1=0.5、k2=0.3、k3=0.2 | 8.58 |
| k1=0.6、k2=0.2、k3=0.2 | 8.46 |

Fig.5
Impact of different forecast periods"

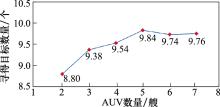
Fig.6
Impact of number changes of AUVs"


Fig.7
Schematic diagram of search result for six AUVs"


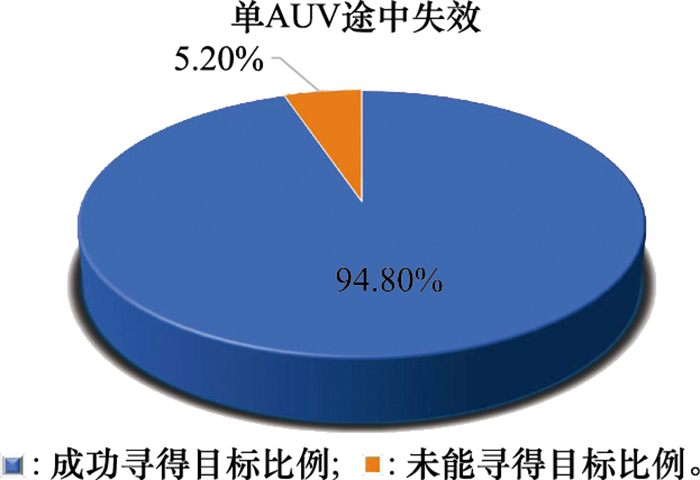
Fig.8
Schematic diagram of search results in case of single AUV failure"
| 1 |
LU J , CHEN X , LUO M X , et al. Cooperative localization for multiple AUVs based on the rough estimation of the measurements[J]. Applied Soft Computing, 2020, 91, 106197.
doi: 10.1016/j.asoc.2020.106197 |
| 2 |
LING H F , ZHU T , HE W X , et al. Cooperative search method for multiple AUVs based on target clustering and path optimi-zation[J]. Natural Computing, 2021, 20, 3- 10.
doi: 10.1007/s11047-019-09749-3 |
| 3 | YAN Z P, HAO Y S, LI J. Multi-UUV collaborative search planning based on predictive control and backtracking[C]//Proc. of the IEEE 38th Chinese Control Conference, 2019: 2266-2271. |
| 4 | DING Y M, LIU C Y, LU Q, et al. Effectiveness evaluation of UUV cooperative combat based on GAPSO-BP neural network[C]//Proc. of the IEEE 31st Chinese Control and Decision Conference, 2019: 4620-4625. |
| 5 |
SUN S Q , SONG B W , WANG P , et al. Real-time mission-motion planner for multi-UUVs cooperative work using tri-level programing[J]. IEEE Trans.on Intelligent Transportation Systems, 2022, 23 (2): 1260- 1273.
doi: 10.1109/TITS.2020.3023819 |
| 6 | ZHOU J J, ZHANG Q, WANG H J, et al. Multi-UUV formation coordination control based on virtual navigator[C]//Proc. of the IEEE 39th Chinese Control Conference, 2020: 2090-2095. |
| 7 | HU J W, JIN B, LI H P, et al. A DMPC-based approach to circular cooperative path-following control of unmanned underwater vehicles[C]//Proc. of the IEEE 28th International Symposium on Industrial Electronics, 2019: 1207-1212. |
| 8 |
LIANG Q W , SUN T Y , OU J L . System reliable probability for multi-AUV cooperative systems under the influence of current[J]. The Journal of Navigation, 2019, 72 (6): 1649- 1659.
doi: 10.1017/S0373463319000298 |
| 9 | 张伟, 王乃新, 魏世琳, 等. 水下无人潜航器集群发展现状及关键技术综述[J]. 哈尔滨工程大学学报, 2020, 41 (2): 289- 297. |
| ZHANG W , WANG N X , WEI S L , et al. Overview of unmanned underwater vehicle swarm development status and key technologies[J]. Journal of Harbin Engineering University, 2020, 41 (2): 289- 297. | |
| 10 | XU H X , JIANG C L . Heterogeneous oceanographic exploration system based on USV and AUV: a survey of developments and challenges[J]. Journal of University of Chinese Academy of Sciences, 2021, 38 (2): 145- 159. |
| 11 | GERMAN C R, JAKUBA M V, KINSEY J C, et al. A long term vision for long-range ship-free deep ocean operations: persistent presence through coordination of autonomous surface vehicles and autonomous underwater vehicles[C]//Proc. of the IEEE Autonomous Underwater Vehicles, 2012. |
| 12 | NAKATANI T, HYAKUDOME T, SAWA T, et al. ASV MAINAMI for AUV monitoring and its sea trial[C]//Proc. of the IEEE/OES Autonomous Underwater Vehicles, 2016: 301-306. |
| 13 | PROCTOR A, ZARAYSKAYA Y, BAZHENOVA E, et al. Unlocking the power of combined autonomous operations with underwater and surface vehicles: success with a deep-water survey AUV and USV mothership[C]//Proc. of the OCEANS-MTS/IEEE Kobe Techno-Ocean, 2018. |
| 14 | NORGREN P, LUDVIGSEN M, INGEBRETSEN T, et al. Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim fjord[C]//Proc. of the IEEE Oceans, 2015. |
| 15 | INABA S, SASANO M, KIM K, et al. Tracking experiment of multiple AUVs by a semi-submersible ASV[C]//Proc. of the IEEE Underwater Technology, 2017. |
| 16 | JI D X, REN S Z, ZHENG R, et al. A tracking control method of ASV following AUV[C]//Proc. of the IEEE Oceans, 2013. |
| 17 | RODIONOV A Y, KULIK S Y, UNRU P P. Some trial results of the hydro acoustical communication system operation for AUV and ASV group control and navigation[C]//Proc. of the MTS/IEEE OCEANS, 2016. |
| 18 | SASANO M, INABA S, OKAMOTO A, et al. Development of a semi-submersible autonomous surface vehicle for control of multiple autonomous underwater vehicles[C]//Proc. of the IEEE Techno-Ocean, 2017: 309-312. |
| 19 | NAKATANI T, HYAKUDOME T, SAWA T, et al. Deve-lopment of an autonomous surface vehicle for monitoring underwater vehicles[C]//Proc. of the MTS/IEEE OCEANS, 2015. |
| 20 | VALENTE J, BARRIENTOS A, CERRO J D, et al. Multi-robot visual coverage path planning: geometrical metamorphosis of the workspace through raster graphics based approaches[C]//Proc. of the International Conference on Computational Science and its Applications, 2011: 58-73. |
| 21 |
GHOSE D , GURUPRASAD K R . Automated multi-agent search using centroidal voronoi configuration[J]. IEEE Trans. on Automation Science and Engineering, 2011, 8 (2): 420- 423.
doi: 10.1109/TASE.2010.2072920 |
| 22 |
PEHLIVANOGLU Y V . A new vibrational genetic algorithm enhanced with a voronoi diagram for path planning of autonomous UAV[J]. Aerospace Science and Technology, 2012, 16 (1): 47- 55.
doi: 10.1016/j.ast.2011.02.006 |
| 23 |
HU J W , XIE L H , LUM K Y , et al. Multiagent information fusion and cooperative control in target search[J]. IEEE Trans.on Control Systems Technology, 2013, 21 (4): 1223- 1235.
doi: 10.1109/TCST.2012.2198650 |
| 24 | SUN A K, LIU H. Cooperative UAV search for moving targets using a modified diffusion uncertainty model[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2009. |
| 25 | ZHEN Z J , XING D J , GAO C . Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J]. Aerospace Science & Technology, 2018, 76 (1): 402- 411. |
| 26 |
HU J W , XIE L H , XU J , et al. Multi-agent cooperative target search[J]. Sensors, 2014, 14 (6): 9408- 9428.
doi: 10.3390/s140609408 |
| 27 | KHAN A, YANMAZ E, RINNER B. Information merging in multi-UAV cooperative search[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2014: 3122-3129. |
| 28 | 黄杰, 孙伟, 高渝. 双属性概率图优化的无人机集群协同目标搜索[J]. 系统工程与电子技术, 2020, 42 (1): 118- 127. |
| HUANG J , SUN W , GAO Y . Cooperative searching for the multi-UAVs based on dual-attribute probability model optimization[J]. Systems Engineering and Electronics, 2020, 42 (1): 118- 127. | |
| 29 | 彭辉, 沈林成, 朱华勇. 基于分布式模型预测控制的多UAV协同区域搜索[J]. 航空学报, 2010, 31 (3): 593- 601. |
| PENG H , SHEN L C , ZHU H Y . Multiple UAV cooperative area search based on distributed model predictive control[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31 (3): 593- 601. | |
| 30 | 张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41 (5): 220- 232. |
| ZHANG Z X , LONG T , XU G T , et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving targets[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (5): 220- 232. | |
| 31 | 马威强, 高永琪, 赵苗. 基于全局最优和差分变异的头脑风暴优化算法[J]. 系统工程与电子技术.https://kns.cnki.net/kcms/detail/11.2422.TN.20210531.0826.002.html. |
| MA W Q, GAO Y Q, ZHAO M. Global-best difference-mutation brain storm optimization algorithm[J]. Systems Engineering and Electronics.https://kns.cnki.net/kcms/detail/11.2422.TN.20210531.0826.002.html. | |
| 32 | SHI Y H. Brain storm optimization algorithm[C]//Proc. of the 2nd International Conference on Swarm Intelligence, 2011: 303-309. |
| [1] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [2] | Ning WANG, Zhe LI, Xiaolong LIANG, Yubing WANG, Yueqi HOU. Cooperative region search of UAV swarm with limited communication distance [J]. Systems Engineering and Electronics, 2022, 44(5): 1615-1625. |
| [3] | Shiwei FAN, Ya ZHANG, Qiang HAO, Pan JIANG, Fei YU. Cooperative positioning and error estimation algorithm based on factor graph [J]. Systems Engineering and Electronics, 2021, 43(2): 499-507. |
| [4] | Yanan LI, Haibin HUANG, Liangming CHEN, Yufei ZHUANG, Xiaoli WANG. Energy-optimal three-dimensional path planning for AUV under changing ocean current environment [J]. Systems Engineering and Electronics, 2021, 43(12): 3667-3674. |
| [5] | LAI Zuomei, QIAO Wensheng, GU Bo, WANG Shiyi. Research on sensor cooperative radiation control strategy under task performance constraints [J]. Systems Engineering and Electronics, 2019, 41(8): 1749-1754. |
| [6] | LI Juan, ZHANG Bingjian, YANG Lijuan, WANG Mengdi. Multi-AUV target search algorithm with cognitive based adaptive optimization in unknown environment#br# [J]. Systems Engineering and Electronics, 2018, 40(8): 1839-1845. |
| [7] | ZENG Guoqi, BAI Yu, LIN Wei, DING Wenrui. Multi-UAV cooperative search method for ground moving targets [J]. Systems Engineering and Electronics, 2018, 40(7): 1498-1505. |
| [8] | YAN Wei-sheng, QI Bei-bei, GAO Jian, LI Yong. Homing guidance algorithm for an autonomous underwater vehicle based on dipolar field [J]. Systems Engineering and Electronics, 2016, 38(4): 902-908. |
| [9] | WANG Lei, CHENG Xiang-hong, RAN Chang-yan, CHEN Hong-mei, HU Jie. Improved multiple model algorithm based on Bayesian network for AUV integrated navigation [J]. Systems Engineering and Electronics, 2015, 37(4): 901-906. |
| [10] | LIU Ming-yong, DONG Ting-ting, ZHANG Li-chuan. Underwater SLAM navigation algorithm based on random beacons [J]. Systems Engineering and Electronics, 2015, 37(12): 2830-2834. |
| [11] | YAN Wei-sheng, ZUO Lei, CUI Rong-xin. Model based adaptive coverage control for multiple autonomous underwater vehicles [J]. Systems Engineering and Electronics, 2015, 37(11): 2574-2578. |
| [12] | FU Xiao-wei,CHENG Si-min,GAO Xiao-guang. Path planning and communication optimizing in multi-UAVs cooperative communication relay [J]. Systems Engineering and Electronics, 2014, 36(5): 890-894. |
| [13] | QI Xiaoming, WEI Ruixuan, SHEN Dong, RU Changjian, ZHOU Huan. Distributed cooperative search methods of multiUAV #br# based on prediction of moving targets [J]. Systems Engineering and Electronics, 2014, 36(12): 2417-2425. |
| [14] | CHEN Pan, WU Xiao-feng, CHEN Yun. Method of call search for Markovian motion targets using UUV cooperation [J]. Journal of Systems Engineering and Electronics, 2012, 34(8): 1630-1634. |
| [15] | YANG Yong-peng, ZHAO Yu-xin, HAO Yan-ling, DU Hang-yuan. Decoupling control system for AUV hovering nearsurface [J]. Journal of Systems Engineering and Electronics, 2012, 34(3): 572-577. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||