Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (7): 2371-2382.doi: 10.12305/j.issn.1001-506X.2025.07.29
• Guidance, Navigation and Control • Previous Articles
Dynamic obstacle avoidance method for unmanned vehicle based on pedestrian trajectory prediction
Yue ZHANG, Jing WANG, Dingheng WANG, Changhua DAI, Yuanchao DUAN, Baorong LIU, Xiaosong ZHANG
- Northwest Institute of Mechanical and Electrical Engineering, Xianyang 712000, China
-
Received:2024-09-18Online:2025-07-16Published:2025-07-22 -
Contact:Yue ZHANG
CLC Number:
Cite this article
Yue ZHANG, Jing WANG, Dingheng WANG, Changhua DAI, Yuanchao DUAN, Baorong LIU, Xiaosong ZHANG. Dynamic obstacle avoidance method for unmanned vehicle based on pedestrian trajectory prediction[J]. Systems Engineering and Electronics, 2025, 47(7): 2371-2382.
share this article
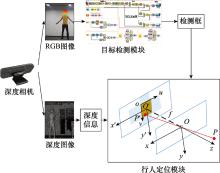
Fig.1
Framework for pedestrian detection and positioning"
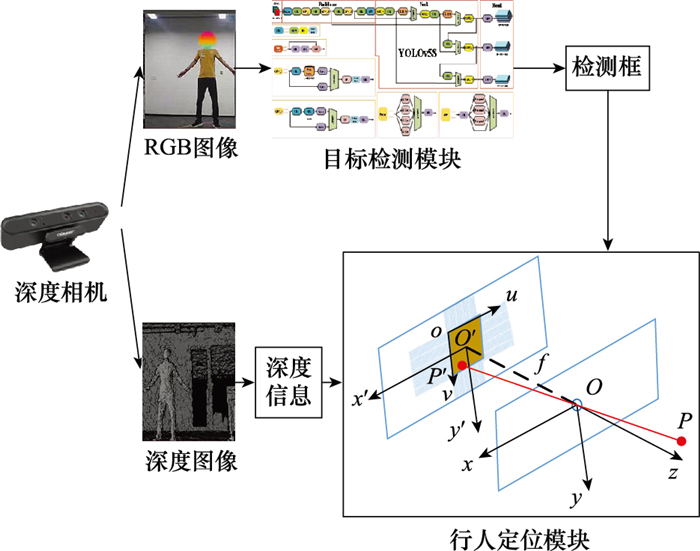
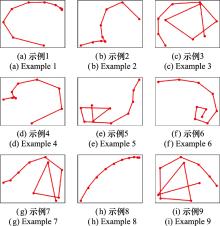
Fig.2
Example of pedestrian trajectory"
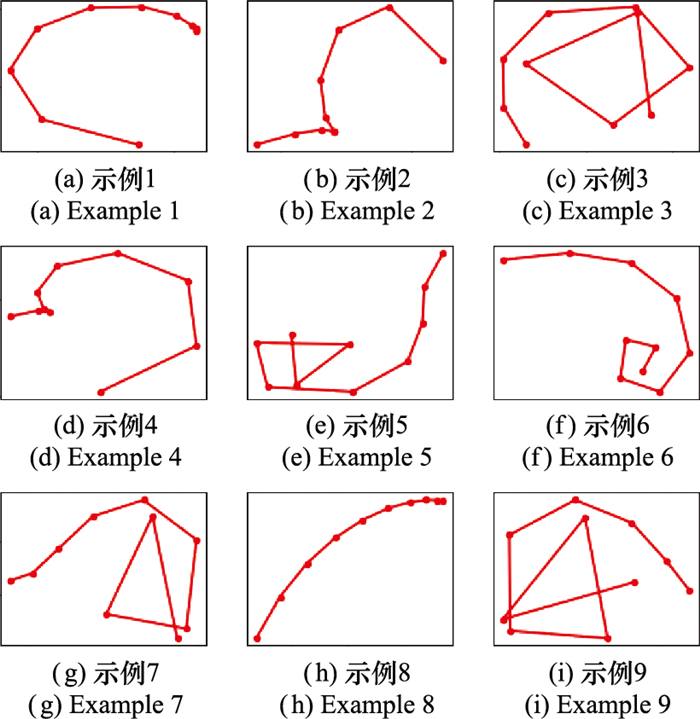
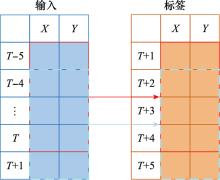
Fig.3
Construction of trajectory prediction dataset"
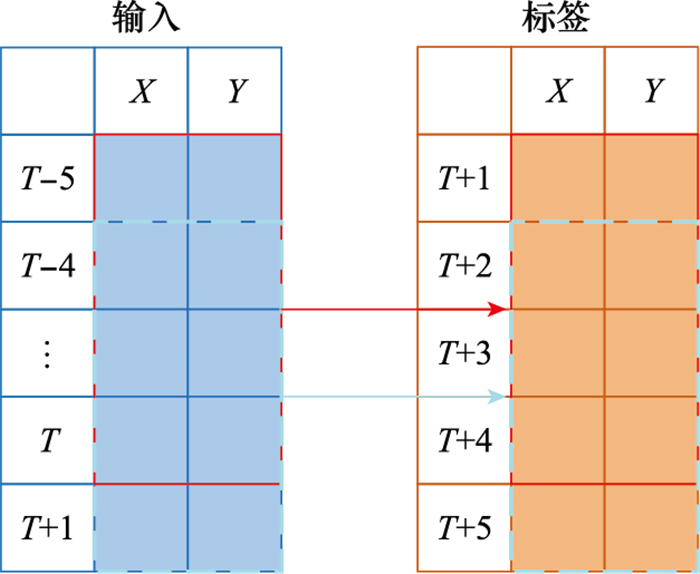
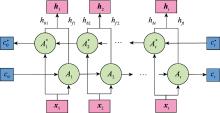
Fig.4
Structure of BiGRU"
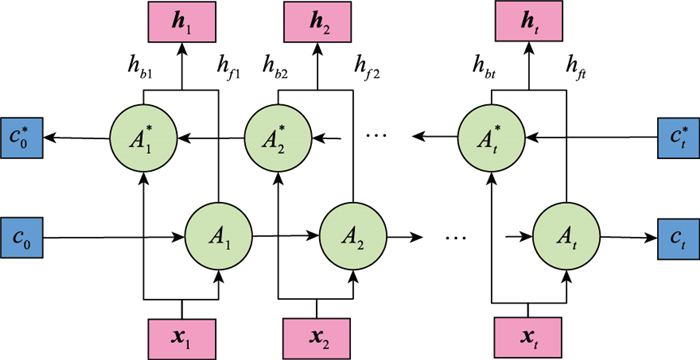

Fig.5
BiGRU with time ATT mechanism"
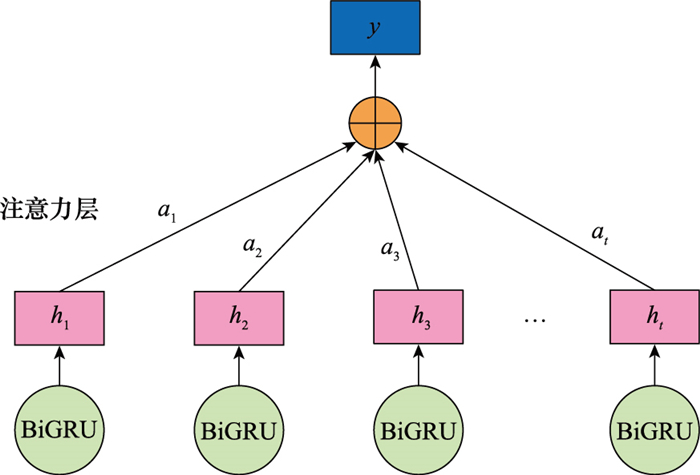

Fig.6
Overall structure of pedestrian trajectory prediction model"
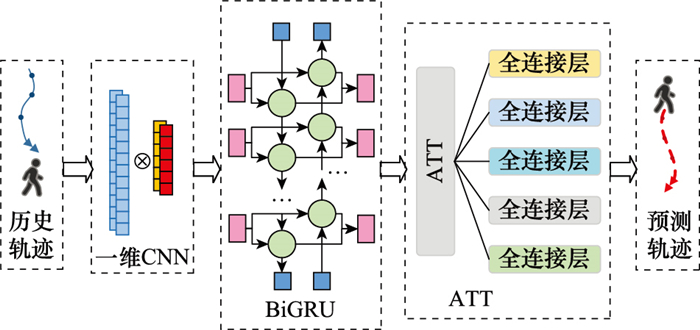
Fig.7
Composition of multi-layer cost map"
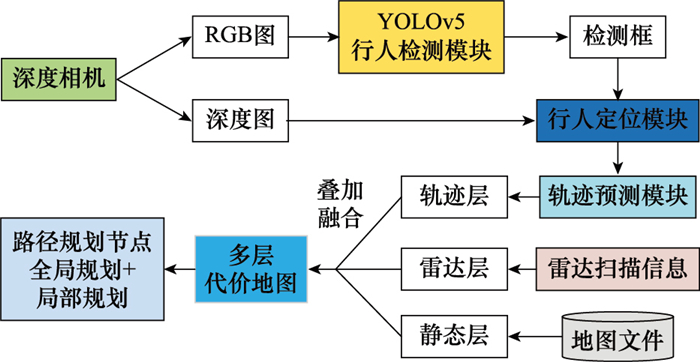
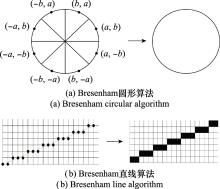
Fig.8
Bresenham algorithm"
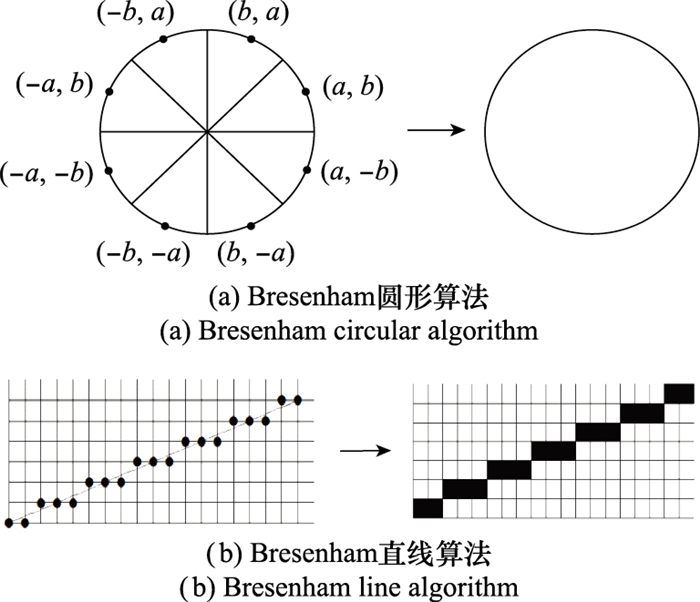
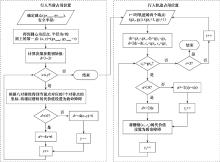
Fig.9
Pedestrian and trajectory occupation grid drawing process"
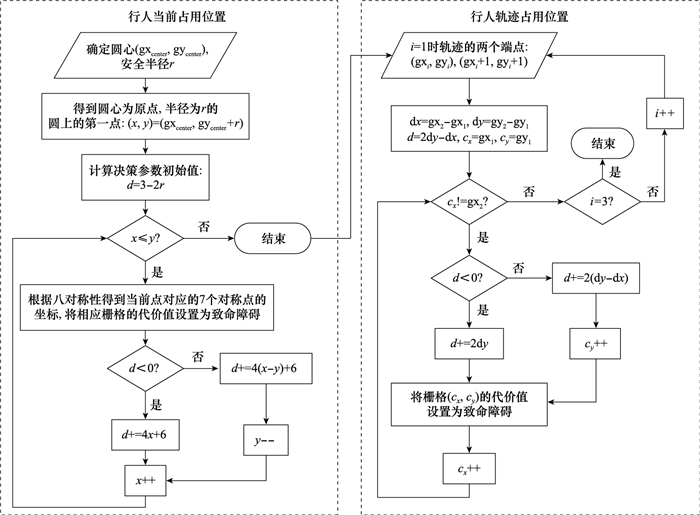

Fig.10
Comparison of cost map and path planning before and after integrating pedestrain trajectory"
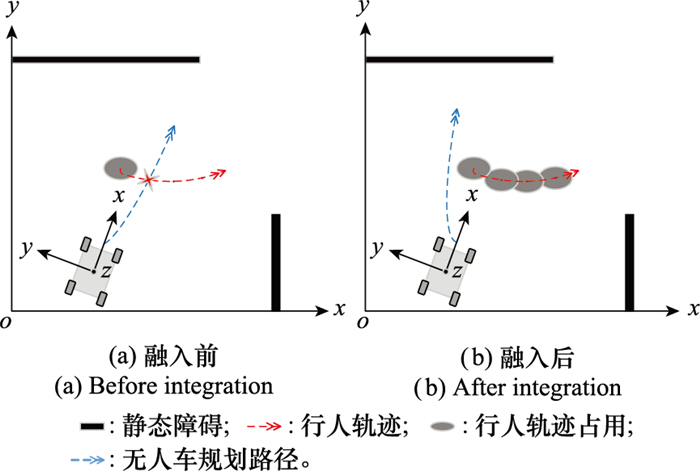
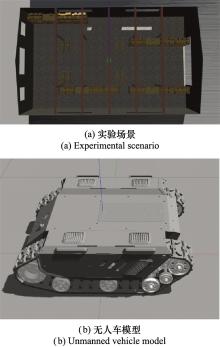
Fig.11
Construction of simulation experiment platform"
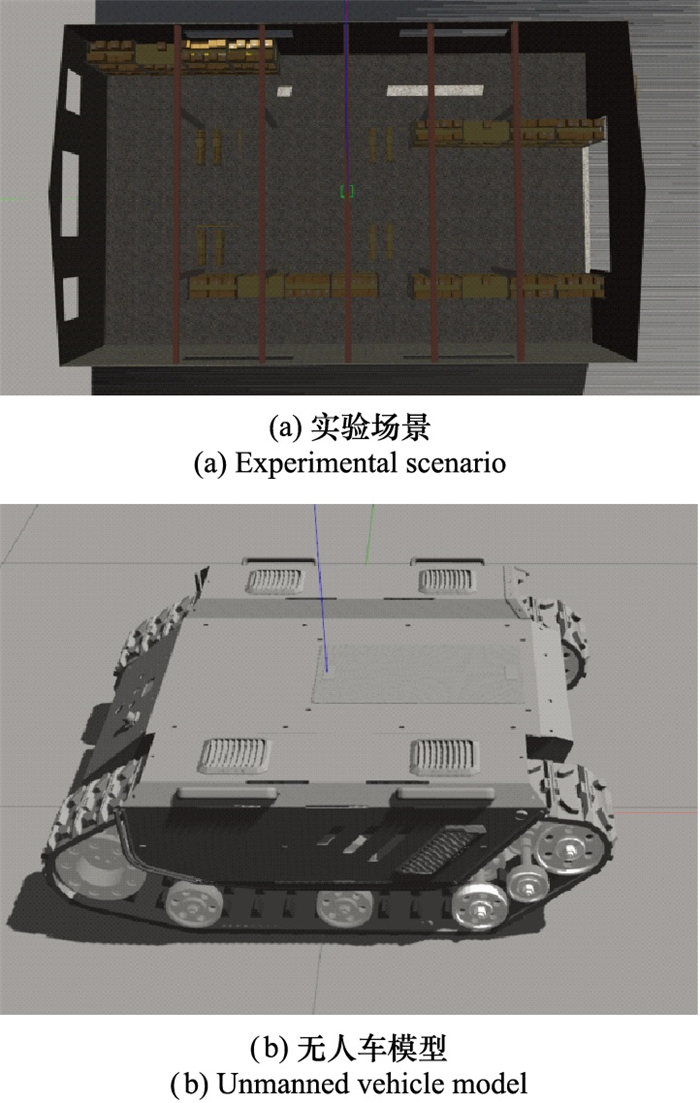
Table 1
Key parameters of unmanned vehicle and depth cameras"
| 参数名称 | 参数值 | |
| 车辆运动参数 | 最大线速度/(m/s) | 1.5 |
| 最大角速度/(rad/s) | 1.57 | |
| 最大线加速度/(m/s2) | 3 | |
| 最大角加速度/(rad/s2) | 3.14 | |
| 深度相机参数 | 图像尺寸/(px)2 | 1 280×960 |
| 深度探测范围/m | 10 | |
| 相机内参/px | fx=fy=298.447 8 cx=640;cy=480 | |

Fig.12
Pedestrian recognition based on depth camera"
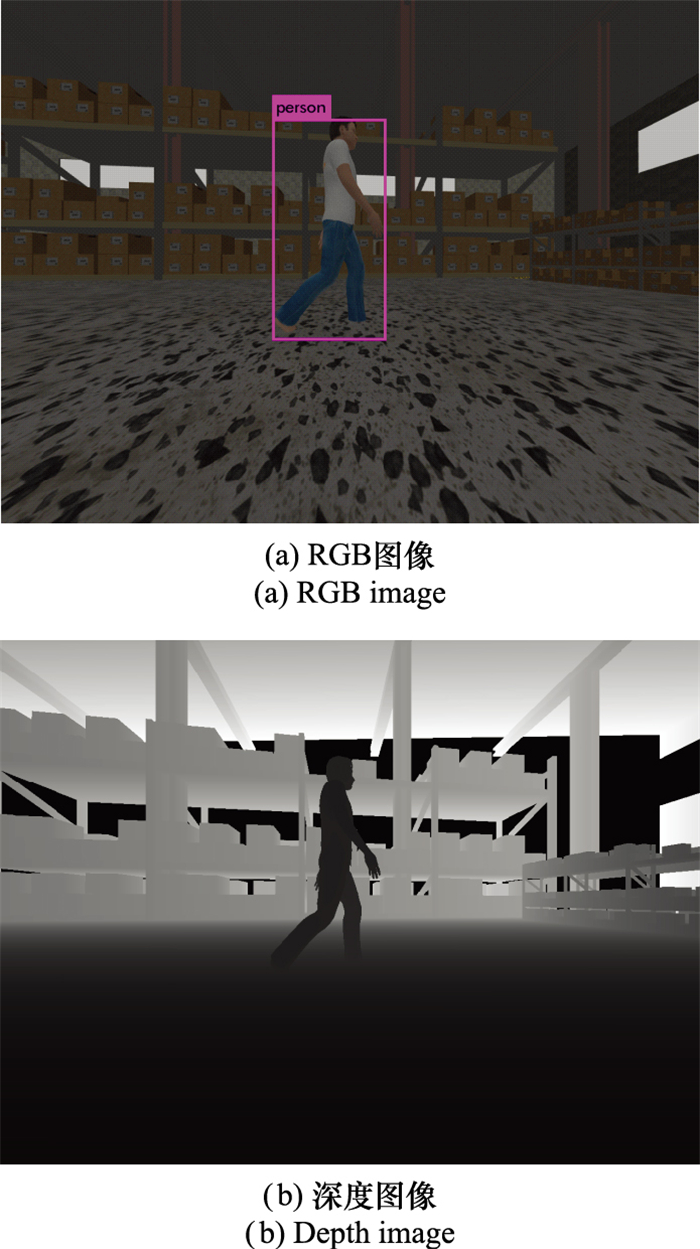
Table 2
Static pedestrian positioning verification"
| 序号 | 无人车位姿/(m, m, rad) | 行人真实坐标/m | 检测框像素坐标/px | 检测框深度/m | 行人定位坐标/m |
| 1 | (0, 0, 0) | (2, 0) | (578, 266)(752, 583) | 1.39 | (2.06, -0.02) |
| 2 | (1, 1, π/4) | (3, 3) | (528, 3379)(614, 547) | 2.23 | (2.86, 2.99) |
| 3 | (2, 5, π/2) | (4, 8) | (836, 343)(949, 546) | 2.38 | (3.89, 8.01) |

Fig.13
Result of continuous positioning of dynamic pedestrians"
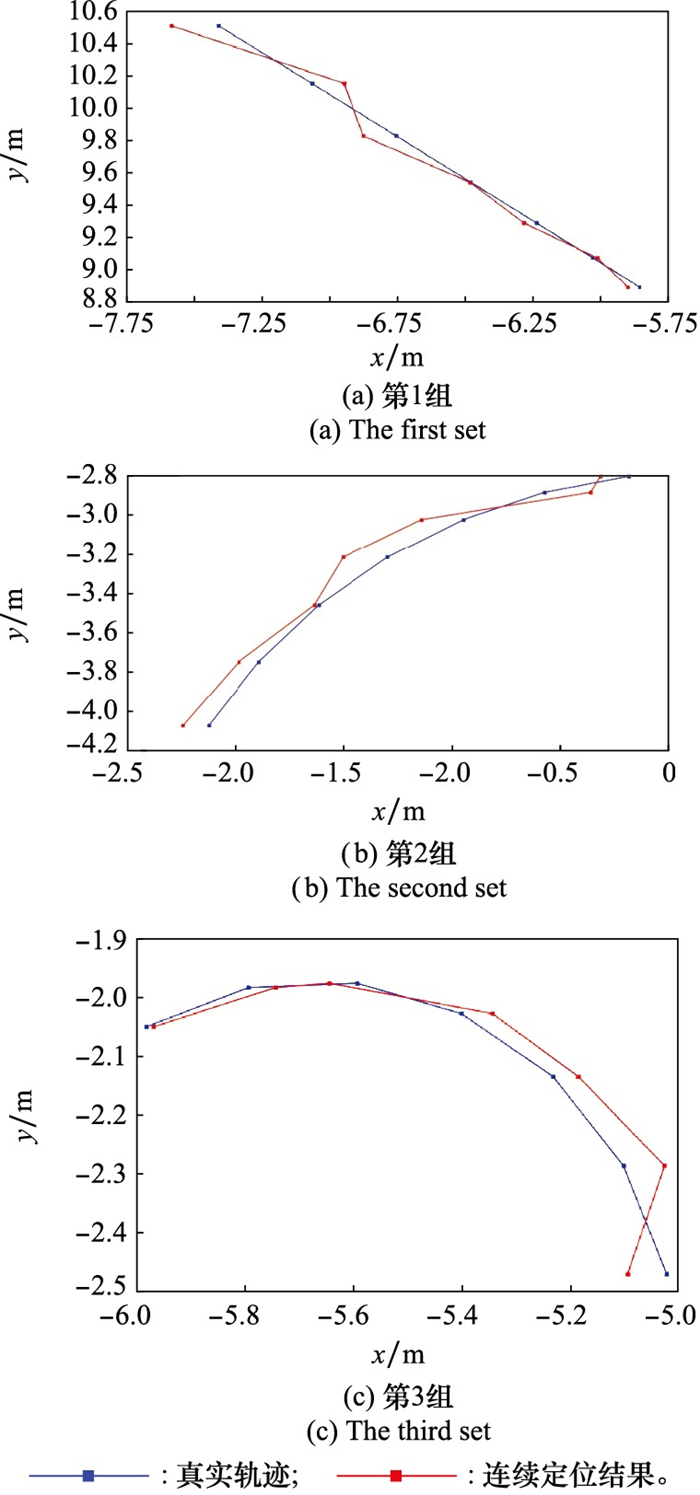
Fig.14
Comparison of error reduction curve"
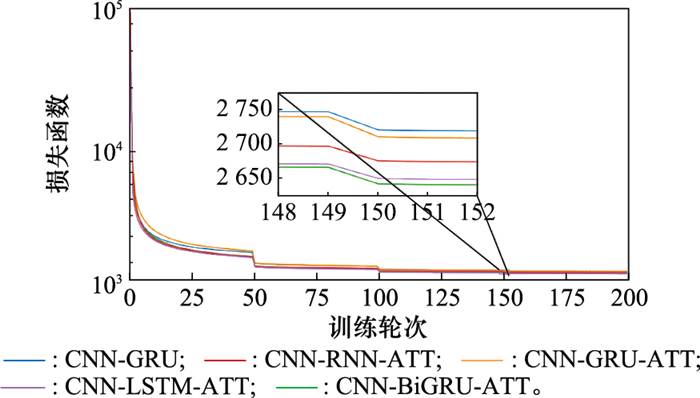
Table 3
Comparison of evaluation indicators for trajectory prediction models"
| 算法 | MAE | RMSE | MAPE |
| CNN-GRU | 0.278 5 | 0.494 1 | 0.017 8 |
| CNN-RNN-ATT | 0.356 5 | 0.518 5 | 0.038 5 |
| CNN-GRU-ATT | 0.410 8 | 0.606 6 | 0.028 0 |
| CNN-LSTM-ATT | 0.357 9 | 0.520 2 | 0.012 0 |
| CNN-BiGRU-ATT | 0.157 9 | 0.236 6 | 0.006 4 |

Fig.15
Comparison of trajectory prediction performance"

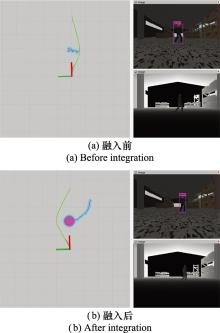
Fig.16
Comparison of cost map and path planning before and after integrating pedestrian positioning and trajectory prediction"
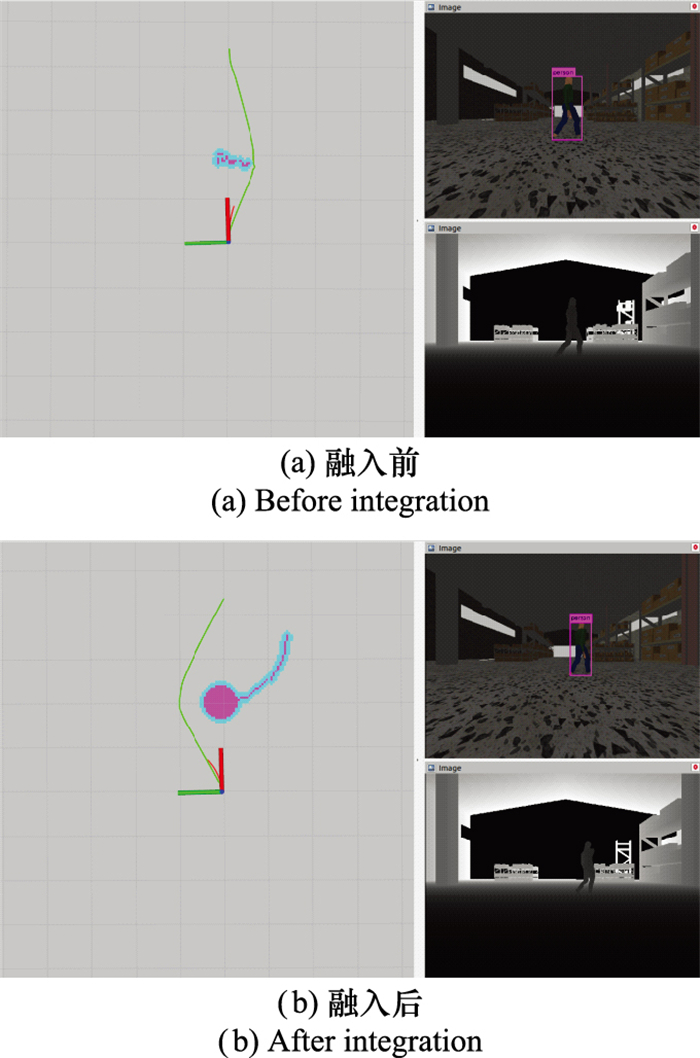
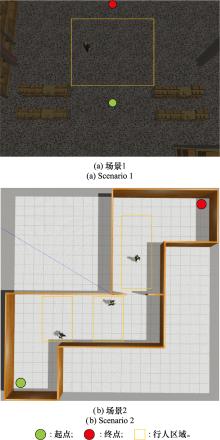
Fig.17
Dynamic pedestrian obstacle avoidance experimental scene"
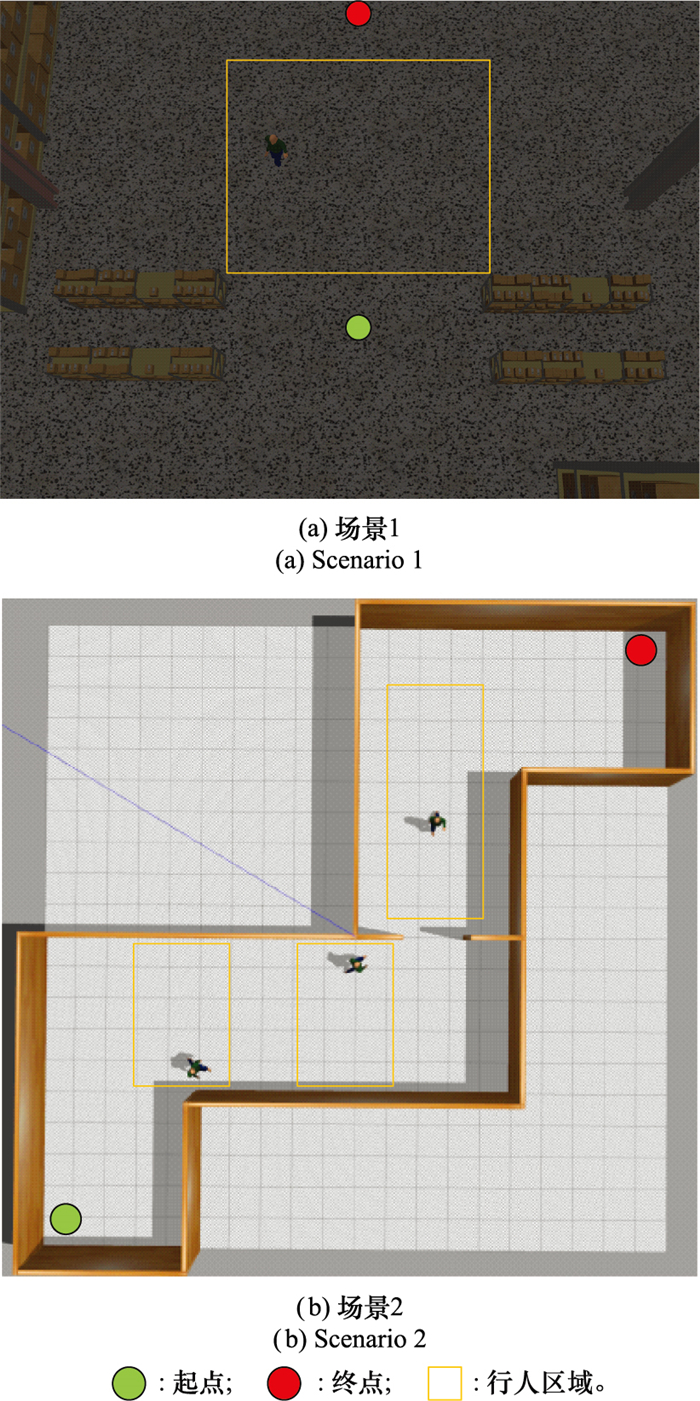
Table 4
Comparison of dynamic obstacle avoidance effects"
| 参数 | 状态 | 场景1 | 场景2 |
| 最短用时/s | 融入前 | 10.87 | 46.26 |
| 融入后 | 10.53 | 45.74 | |
| 平均用时/s | 融入前 | 13.28 | 53.17 |
| 融入后 | 11.27 | 47.39 | |
| 最小距离/m | 融入前 | 0.23 | 0.24 |
| 融入后 | 0.67 | 0.58 |
| 1 | 孙毅, 宋乐, 王桂芝. 2019年国外地面无人自主系统发展综述[J]. 飞航导弹, 2020 (1): 30- 34. |
| SUN Y , SONG L , WANG G Z . Overview of the development of ground unmanned autonomous systems abroad in 2019[J]. Aviation Missile, 2020 (1): 30- 34. | |
| 2 | 周鲜成, 王莉, 周开军, 等. 动态车辆路径问题的研究进展及发展趋势[J]. 控制与决策, 2019, 34 (3): 449- 458. |
| ZHOU X C , WANG L , ZHOU K J , et al. Research progress and development trends of dynamic vehicle routing problems[J]. Control and Decision Making, 2019, 34 (3): 449- 458. | |
| 3 | PEREIRA F U , BRASIL P M D A , CUADROS M A D S L , et al. Analysis of local trajectory planners for mobile robot with robot operating system[J]. Latin America Transactions, 2022, 20 (1): 92- 99. |
| 4 |
王梓强, 胡晓光, 李晓筱, 等. 移动机器人全局路径规划算法综述[J]. 计算机科学, 2021, 48 (10): 19- 29.
doi: 10.11896/jsjkx.200700114 |
|
WANG Z Q , HU X G , LI X X , et al. Overview of global path planning algorithms for mobile robots[J]. Computer Science, 2021, 48 (10): 19- 29.
doi: 10.11896/jsjkx.200700114 |
|
| 5 | MARTINEZ-ROZAS S , ALEJO D , CABALLERO F , et al. Path and trajectory planning of a tethered UAV-UGV marsupial robotic system[J]. IEEE Robotics and Automation Letters, 2023, 8 (10): 6475- 6482. |
| 6 | KWAME A B B , RYAD C , YAW A A , et al. An overview of nature-inspired, conventional, and hybrid methods of autonomous vehicle path planning[J]. Journal of Advanced Transportation, 2018, 2018 (4): 8269698. |
| 7 | BROTEE S , KABIR F , RAZZAQUE M A , et al. Optimizing UAV-UGV coalition operations: a hybrid clustering and multi- agent reinforcement learning approach for path planning in obstructed environment[J]. Ad Hoc Networks, 2024, 160 (1): 103519. |
| 8 | CHEKOL A G , FUFA M S . A survey on next location prediction techniques, applications, and challenges[J]. EURASIP Journal on Wireless Communications and Networking, 2022, 2022 (1): 29. |
| 9 | 颜鹏, 郭继峰, 白成超. 考虑移动目标不确定行为方式的轨迹预测方法[J]. 宇航学报, 2022, 43 (8): 1040- 1051. |
| YAN P , GUO J F , BAI C C . A trajectory prediction method considering uncertain behavior patterns of moving targets[J]. Journal of Astronautics, 2022, 43 (8): 1040- 1051. | |
| 10 | WU H R, WANG L K, ZHENG S F, et al. Crossing-road pedestrian trajectory prediction based on intention and behavior identification[C]//Proc. of the IEEE 23rd International Confe-rence on Intelligent Transportation Systems, 2020. |
| 11 | 陈明强, 傅嘉赟. 基于无迹卡尔曼滤波的飞行航迹预测方法研究[J]. 计算机仿真, 2021, 38 (6): 27-30, 36. |
| CHEN M Q , FU J Y . Research on flight trajectory prediction method based on unscented Kalman filter[J]. Computer Simulation, 2021, 38 (6): 27-30, 36. | |
| 12 | CHEN Y F. Predictive modeling and socially aware motion planning in dynamic, uncertain environments[D]. Boston: Massachusetts Institute of Technology, 2017. |
| 13 | GARZON M, GARZON-RAMOS D, BARRIENTOS A, et al. Pedestrian trajectory prediction in large infrastructures—a long-term approach based on path planning[C]//Proc. of the International Conference on Informatics in Control, Automation and Robotics, 2016: 381-389. |
| 14 | GAO J Y, SUN C, ZHAO H, et al. Vectornet: encoding hd maps and agent dynamics from vectorized representation[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11525-11533. |
| 15 | BHUJEL N, TEOH E K, YAU W Y. Pedestrian trajectory prediction using RNN encoder-decoder with spatio-temporal attentions[C]//Proc. of the IEEE 5th International Conference on Mechatronics System and Robots, 2019: 110-114. |
| 16 | GUAN H G, GUO P. Research on pedestrian trajectory prediction by GAN model based on LSTM[C]//Proc. of the IEEE 3rd International Conference on Power, Electronics and Computer Applications, 2023: 1400-1405. |
| 17 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proc. of the Computer Vision & Pattern Recognition, 2016. |
| 18 | NAZIR A, WANI M. You only look once-object detection models: a review[C]//Proc. of the 10th International Confe-rence on Computing for Sustainable Global Development, 2023: 1088-1095. |
| 19 |
ZHOU C , REN D C , ZHANG X Y , et al. Human position detection based on depth camera image information in mechanical safety[J]. Advances in Mathematical Physics, 2022,
doi: 10.1155/2022/9170642 |
| 20 | ANBU N A , PINAGAPANI A K , MANI G , et al. Improved vehicle navigation using sensor fusion of inertial, odometeric sensors with global positioning system[J]. International Journal of Vehicle Autonomous Systems, 2020, 15 (3/4): 307. |
| 21 | 潘献飞, 宁治文, 王茂松, 等. 基于因子图的导航定位技术应用分析与思考[J]. 控制理论与应用, 2023, 40 (12): 2130- 2141. |
| PAN X F , NING Z W , WANG M S , et al. Analysis and reflection on the application of navigation and positioning techno-logy based on factor graph[J]. Control Theory and Application, 2023, 40 (12): 2130- 2141. | |
| 22 | 高帅. 基于行人轨迹预测的局部路径规划与跟踪方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| GAO S. Research on local path planning and tracking method based on pedestrian trajectory prediction[D]. Harbin: Harbin Institute of Technology, 2022. | |
| 23 |
谢磊, 丁达理, 魏政磊, 等. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43 (6): 1651- 1658.
doi: 10.12305/j.issn.1001-506X.2021.06.23 |
|
XIE L , DING D L , WEI Z L , et al. Real time prediction of maneuvering trajectories using AdaBoost PSO-LSTM network[J]. Systems Engineering and Electronics, 2021, 43 (6): 1651- 1658.
doi: 10.12305/j.issn.1001-506X.2021.06.23 |
|
| 24 | ZHANG B L , ZHOU W . Transformer-encoder-GRU (T-E-GRU) for Chinese sentiment analysis on chinese comment text[J]. Neural Processing Letters, 2022, 55 (2): 1847- 1867. |
| 25 | ABUMOHSEN M , OWDA A Y , OWDA M . Electrical load forecasting using LSTM, GRU, and RNN algorithms[J]. Energies, 2023, 16 (5): 2283. |
| 26 | MIM T R , AMATULLAH M , AFREEN S , et al. GRU-INC: an inception-attention based approach using GRU for human activity recognition[J]. Expert Systems with Applications, 2023, 216, 119419. |
| 27 | MAHJOUB S , CHRIFI L , MARHIC B , et al. Predicting energy consumption using LSTM, multi-layer GRU and drop-GRU neural networks[J]. Sensors, 2022, 22 (11): 4062. |
| 28 | HRISTOV P. Real-time abnormal human activity detection using 1DCNN-LSTM for 3D skeleton data[C]//Proc. of the 12th National Conference with International Participation, 2021. |
| 29 | 王堃, 周志崇, 曲凯, 等. 基于注意力机制的CNN-LSTM模型的航迹预测[J]. 空军工程大学学报, 2023, 24 (6): 50- 57. |
| WANG K , ZHOU Z C , QU K , et al. Track prediction based on attention mechanism using CNN-LSTM model[J]. Journal of Air Force Engineering University, 2023, 24 (6): 50- 57. | |
| 30 | LU D V, HERSHBERGER D, SMART W D. Layered costmaps for context-sensitive navigation[C]//Proc. of the International Conference on Intelligent Robots & Systems, 2014. |
| 31 | CAO M H , LIU S Y , CAO F H . Midpoint distance circle generation algorithm based on midpoint circle algorithm and Bresenham circle algorithm[J]. Journal of Physics: Conference Series, 2020, 1438 (1): 012017. |
| 32 | ZHANG Y X , ZHANG K R , WU C H , et al. Comparative analysis of DDA algorithm and Bresenham algorithm[J]. International Journal of Intelligent Internet of Things Computing, 2022, 1 (4): 263- 272. |
| [1] | Jinzhao ZHU, Di ZHOU, Xiaobo CHEN, Mingchun CAI. Fast time-varying maneuver model and trajectory prediction of near space hypersonic vehicle [J]. Systems Engineering and Electronics, 2025, 47(1): 244-253. |
| [2] | Shan LU, Shiyuan ZHANG, Yueyang HOU, Xiaotong ZHANG, Qing LI. Filter algorithm design for autonomous navigation in deep space detection considering the influence of multiplicative noise [J]. Systems Engineering and Electronics, 2025, 47(1): 287-295. |
| [3] | Gang ZHONG, Jiangying ZHOU, Sen DU, Honghai ZHANG, Hao LIU. Short-time trajectory deviation detection method for UAV based on trajectory prediction [J]. Systems Engineering and Electronics, 2024, 46(8): 2696-2708. |
| [4] | Weibin LI, Chenhao QIN, Tianyi ZHANG, Xin MAO, Donghao YANG, Wenbo JI, Biao HOU, Licheng JIAO. Review: brain-inspired intelligent navigation modeling technology and its application [J]. Systems Engineering and Electronics, 2024, 46(11): 3844-3861. |
| [5] | Zhenya YANG, Zhi ZHANG, Xiaobing SHANG, Zejun CAO, Zhexuan SUN. Vessel trajectory prediction based on improved multi-output support vector [J]. Systems Engineering and Electronics, 2024, 46(1): 173-181. |
| [6] | Wanyan HUANG, Wanhe DU, Shuzhen YANG, Tao YU. Trajectory prediction algorithm based on improved polynomial curve fitting [J]. Systems Engineering and Electronics, 2024, 46(1): 280-289. |
| [7] | Botao SONG, Guangliang XU. Missile trajectory prediction method based on LSTM and 1DCNN [J]. Systems Engineering and Electronics, 2023, 45(2): 504-512. |
| [8] | Mingjie LI, Chijun ZHOU, Humin LEI, Lei SHAO, Changxin LUO. An intelligent trajectory prediction algorithm of reentry glide target based on control parameter estimation [J]. Systems Engineering and Electronics, 2023, 45(1): 221-233. |
| [9] | Ruiping JI, Chengyi ZHANG, Yan LIANG, Yuedong WANG. Trajectory prediction of boost-phase ballistic missile based on LSTM [J]. Systems Engineering and Electronics, 2022, 44(6): 1968-1976. |
| [10] | Lei XIE, Dali DING, Zhenglei WEI, Andi TANG, Peng ZHANG. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM network [J]. Systems Engineering and Electronics, 2021, 43(6): 1651-1658. |
| [11] | Yuke HU, Wei XIA, Xiaoxuan HU, Haiquan SUN, Yunhui WANG. Vessel trajectory prediction based on recurrent neural network [J]. Systems Engineering and Electronics, 2020, 42(4): 871-877. |
| [12] | Hongpeng ZHANG, Changqiang HUANG, Yongbo XUAN, Shangqin TANG. Real-time prediction of air combat flight trajectory using GRU [J]. Systems Engineering and Electronics, 2020, 42(11): 2546-2552. |
| [13] | Guanglei MENG, Mingzhe ZHOU, Haiyin PIAO, Huimin ZHANG. Threat assessment method of dual-aircraft formation based on cooperative tactical recognition [J]. Systems Engineering and Electronics, 2020, 42(10): 2285-2293. |
| [14] | Shijie LI, Humin LEI, Chijun ZHOU, Tao ZHANG. Trajectory prediction algorithm for hypersonic reentry gliding target based on control variables estimation [J]. Systems Engineering and Electronics, 2020, 42(10): 2320-2327. |
| [15] | ZHANG Bolun, ZHOU Di, WU Shikai. Maneuver model and trajectory prediction of near space hypersonic aircraft [J]. Systems Engineering and Electronics, 2019, 41(9): 2072-2079. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||