Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (1): 244-253.doi: 10.12305/j.issn.1001-506X.2025.01.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Fast time-varying maneuver model and trajectory prediction of near space hypersonic vehicle
Jinzhao ZHU1, Di ZHOU1,*, Xiaobo CHEN2, Mingchun CAI2
- 1. School of Astronautics, Harbin Institute of Technology, Harbin 150001, China
1. Beijing Institute of Electronic System Engineering, Beijing 100854, China
-
Received:2024-04-19Online:2025-01-21Published:2025-01-25 -
Contact:Di ZHOU
CLC Number:
Cite this article
Jinzhao ZHU, Di ZHOU, Xiaobo CHEN, Mingchun CAI. Fast time-varying maneuver model and trajectory prediction of near space hypersonic vehicle[J]. Systems Engineering and Electronics, 2025, 47(1): 244-253.
share this article

Fig.1
Target vehicle and radar"


Fig.2
Flow chart of filter"


Fig.3
Flow chart of predictor"


Fig.4
Gliding vehicle speed curve"


Fig.5
Target acceleration estimation curve"


Fig.6
z-axis acceleration estimation"


Fig.7
Target acceleration prediction curve"


Fig.8
Monte Carlo simulation prediction error"
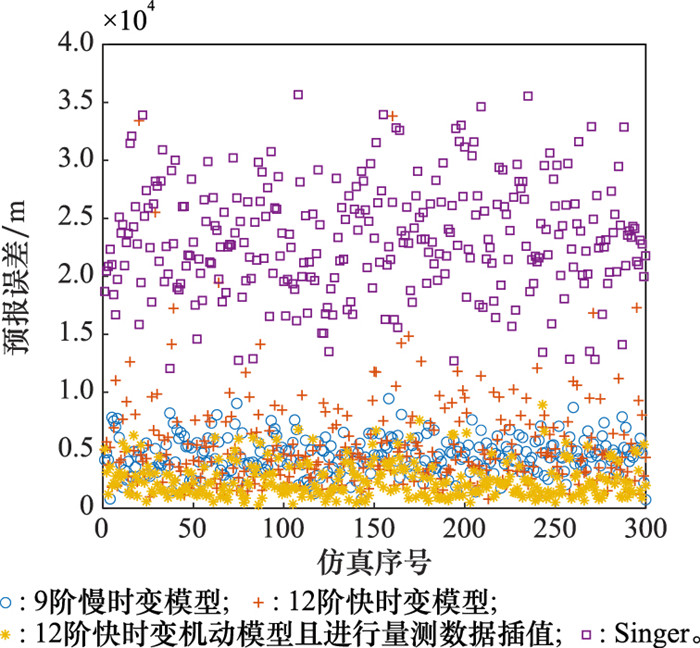
Table 1
Algorithm simulation results and running time comparison"
| 算法 | 300次蒙特卡罗仿真预报误差均值/m | 300次蒙特卡罗仿真预报方差/m2 | 跟踪算法计算时间/ms | 预报算法计算时间/ms |
| 9阶慢时变模型 | 4 479.96 | 2.5×106 | 0.22 | 0.061 |
| 12阶快时变模型 | 5470.34 | 1.7×107 | 0.28 | 0.051 |
| 12阶快时变机动模型且进行量测数据插值 | 2 439.91 | 2.4×106 | 0.30 | 0.058 |
| Singer | 23 263.31 | 2.2×107 | 0.17 | 0.146 |

Fig.9
State Z estimation and prediction curve"

| 1 | 李宏宇, 尹童, 敦晓彪. 临近空间高超声速武器发展概况与防御体系研究[J]. 现代防御技术, 2022, 50 (6): 1- 10. |
| LI H Y , YIN T , DUN X B . Overview of hypersonic weapon development and defense system research in near space[J]. Modern Defense Technology, 2022, 50 (6): 1- 10. | |
| 2 |
赵良玉, 雍恩米, 王波兰. 反临近空间高超声速飞行器若干研究进展[J]. 宇航学报, 2020, 41 (10): 1239- 1250.
doi: 10.3873/j.issn.1000-1328.2020.10.001 |
|
ZHAO L Y , YONG E M , WANG B L . Some achievements on interception of near space hypersonic vehicles[J]. Journal of Astronautics, 2020, 41 (10): 1239- 1250.
doi: 10.3873/j.issn.1000-1328.2020.10.001 |
|
| 3 |
YONG H P , SEO J H , LEE J G . Tracking using the variable-dimension filter with input estimation[J]. IEEE Trans.on Aero- space and Electronic Systems, 1995, 31 (1): 399- 408.
doi: 10.1109/7.366321 |
| 4 |
PARK S T , LEE J G . Design of practical tracking algorithm with radar tracking[J]. IEEE Trans.on Aerospace and Electronic Systems, 1998, 34 (4): 1337- 1344.
doi: 10.1109/7.722718 |
| 5 | IZANLOO R, FAKOORIAN S A, YAZDI H S, et al. Kalman filtering based on the maximum correntropy criterion in the pre-sence of non-Gaussian noise[C]//Proc. of the Annual Confe-rence on Information Science and Systems, 2016: 500-505. |
| 6 |
CHEN B D , LIU X , ZHAO H Q , et al. Maximum correntropy Kalman filter[J]. Automatica, 2017, 76, 70- 77.
doi: 10.1016/j.automatica.2016.10.004 |
| 7 |
CHEN Y M , LI W , DU Y X . A novel robust adaptive Kalman filter with application to urban vehicle integrated navigation systems[J]. Measurement, 2024, 236, 114844.
doi: 10.1016/j.measurement.2024.114844 |
| 8 |
LAN J , LI X R , MU C D . Best model augmentation for variable-structure multiple-model estimation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2011, 47 (3): 2008- 2025.
doi: 10.1109/TAES.2011.5937279 |
| 9 |
张君彪, 熊家军, 兰旭辉, 等. 基于自适应滤波的高超声速滑翔目标三维跟踪算法[J]. 系统工程与电子技术, 2022, 44 (2): 628- 636.
doi: 10.12305/j.issn.1001-506X.2022.02.33 |
|
ZHANG J B , XIONG J J , LAN X H , et al. 3D tracking algorithm of hypersonic gliding target based on adaptive filtering[J]. Systems Engineering and Electronics, 2022, 44 (2): 628- 636.
doi: 10.12305/j.issn.1001-506X.2022.02.33 |
|
| 10 |
LI X R , JILKOV V P . Survey of maneuvering target tracking. Part Ⅰ: dynamic models[J]. IEEE Trans.on Aerospace and Electronic System, 2003, 39 (4): 1333- 1364.
doi: 10.1109/TAES.2003.1261132 |
| 11 |
LI X R , JILKOV V P . Survey of maneuvering target tracking. Part Ⅱ: motion models of ballistic and space targets[J]. IEEE Trans.on Aerospace and Electronic System, 2010, 46 (1): 96- 119.
doi: 10.1109/TAES.2010.5417150 |
| 12 | HUANG J S, ZHANG H B, TANG G J. Radar tracking for hypersonic glide vehicle based on aerodynamic model[C]//Proc. of the 29th Chinese Control and Decision Conference, 2017: 1080-1084. |
| 13 |
HU G G , NI L Q , GAO B , et al. Model predictive based unscented Kalman filter for hypersonic vehicle navigation with INS/GNSS integration[J]. IEEE Access, 2020, 8, 4814- 4823.
doi: 10.1109/ACCESS.2019.2962832 |
| 14 |
DENG F , CHEN J , CHEN C . Adaptive unscented Kalman filter for parameter and state estimation of nonlinear high-speed objects[J]. Journal of Systems Engineering and Electronics, 2013, 24 (4): 655- 665.
doi: 10.1109/JSEE.2013.00076 |
| 15 |
LUO Q H , LI S H , YAN X Z , et al. An improved two-phase robust distributed Kalman filter[J]. Signal Processing, 2024, 220, 109438.
doi: 10.1016/j.sigpro.2024.109438 |
| 16 | HU G G , XU L Y , GAO B B , et al. Robust unscented Kalman filter-based decentralized multisensor information fusion for INS/GNSS/CNS integration in hypersonic vehicle navigation[J]. IEEE Trans.on Instrumentation and Measurement, 2023, 72, 8504011. |
| 17 | HUANG J S , ZHANG H B , TANG G J . Robust UKF-based filtering for tracking a maneuvering hypersonic glide vehicle[J]. Journal of Aerospace Engineering, 2022, 236 (11): 2162- 2178. |
| 18 | KWON B K, HAN S. A robust extended Kalman filtering for linea- rization errors[C]//Proc. of the 15th International Conference on Control, Automation and Systems, 2015: 1485-1487. |
| 19 |
ZORZI M . Robust Kalman filtering under model perturbations[J]. IEEE Trans.on Automatic Control, 2017, 62 (6): 2902- 2907.
doi: 10.1109/TAC.2016.2601879 |
| 20 | ZHANG K, GUO Z Y. Neural predictor-corrector guidance based on optimized trajectory[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2014: 523-528. |
| 21 | ZENG K, ZHUANG X B, XIE Y F, et al. Hypersonic vehicle trajectory classification using improved CNN-LSTM model[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2021: 691-696. |
| 22 | SUN L H, YANG B Q, MA J. A trajectory prediction algorithm for HFVs based on LSTM[C]//Proc. of the 40th Chinese Control Conference, 2021: 7927-7931. |
| 23 | 郑天宇. 基于循环神经网络的临近空间高超声速目标航迹估计与预报[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| ZHNEG T Y. Trajectory estimation and prediction for near space hypersonic targets via recurrent neural networks[D]. Harbin: Harbin Institute of Technology, 2020. | |
| 24 | 吉瑞萍, 张程祎, 梁彦, 等. 基于LSTM的弹道导弹主动段轨迹预报[J]. 系统工程与电子技术, 2022, 44 (6): 1968- 1976. |
| JI R P , ZHANG C Y , LIANG Y , et al. Trajectory prediction of boost-phase ballistic based on LSTM[J]. Systems Engineering and Electronics, 2022, 44 (6): 1968- 1976. | |
| 25 | BARTUSIAK E R, JACOBS M A, SPELLS C F, et al. Transfer learning for hypersonic vehicle trajectory prediction[C]//Proc. of the IEEE Aerospace Conference, 2023. |
| 26 |
DARIO G L , GAETANO T , FRANCESCO C , et al. Long short-term memory-based neural networks for missile maneuvers trajectories prediction[J]. IEEE Access, 2023, 11, 30819- 30831.
doi: 10.1109/ACCESS.2023.3262023 |
| 27 |
LI Y K , LOU J X , TAN X S , et al. Adaptive kernel learning Kalman filtering with application to model-free maneuvering target tracking[J]. IEEE Access, 2022, 10, 78088- 78101.
doi: 10.1109/ACCESS.2022.3193101 |
| 28 | ZHANG K, ZHUANG X B, XIE Y F. Hypersonic vehicle tra-jectory classification using improved CNN-LSTM mode[C]//Proc. of the IEEE International Conference on Unmanned Systems, 2021: 691-696. |
| 29 | 张博伦, 周荻, 吴世凯. 临近空间高超声速飞行器机动模型及弹道预测[J]. 系统工程与电子技术, 2019, 41 (9): 2072- 2079. |
| ZHANG B L , ZHOU D , WU S K . Maneuver model and trajectory prediction of near space hypersonic aircraft[J]. Systems Engineering and Electronics, 2019, 41 (9): 2072- 2079. | |
| 30 |
HERMANN R , KRENER A . Nonlinear controllability and observability[J]. IEEE Trans.on Automatic Control, 1977, 22 (5): 728- 740.
doi: 10.1109/TAC.1977.1101601 |
| [1] | Gang ZHONG, Jiangying ZHOU, Sen DU, Honghai ZHANG, Hao LIU. Short-time trajectory deviation detection method for UAV based on trajectory prediction [J]. Systems Engineering and Electronics, 2024, 46(8): 2696-2708. |
| [2] | Yuyu ZHAO, Chao SUO, Yuxiao WANG. Differential flatness-based tracking control method for hypersonic vehicle [J]. Systems Engineering and Electronics, 2024, 46(3): 1084-1092. |
| [3] | Zhenya YANG, Zhi ZHANG, Xiaobing SHANG, Zejun CAO, Zhexuan SUN. Vessel trajectory prediction based on improved multi-output support vector [J]. Systems Engineering and Electronics, 2024, 46(1): 173-181. |
| [4] | Wanyan HUANG, Wanhe DU, Shuzhen YANG, Tao YU. Trajectory prediction algorithm based on improved polynomial curve fitting [J]. Systems Engineering and Electronics, 2024, 46(1): 280-289. |
| [5] | Botao SONG, Guangliang XU. Missile trajectory prediction method based on LSTM and 1DCNN [J]. Systems Engineering and Electronics, 2023, 45(2): 504-512. |
| [6] | Mingjie LI, Chijun ZHOU, Humin LEI, Lei SHAO, Changxin LUO. An intelligent trajectory prediction algorithm of reentry glide target based on control parameter estimation [J]. Systems Engineering and Electronics, 2023, 45(1): 221-233. |
| [7] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [8] | Ruiping JI, Chengyi ZHANG, Yan LIANG, Yuedong WANG. Trajectory prediction of boost-phase ballistic missile based on LSTM [J]. Systems Engineering and Electronics, 2022, 44(6): 1968-1976. |
| [9] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [10] | Junbao WEI, Haiyan LI, Jing LI. Novel backstepping control for hypersonic vehicle with angle of attack constraint [J]. Systems Engineering and Electronics, 2022, 44(4): 1310-1317. |
| [11] | Tong AN, Peng WANG, Jianhua WANG, Guojian TANG, Yulong PAN, Haishan CHEN. Integrated guidance and control schemes for dynamic surface of flexible hypersonic vehicles [J]. Systems Engineering and Electronics, 2022, 44(3): 956-966. |
| [12] | Junbiao ZHANG, Jiajun XIONG, Xuhui LAN, Fan LI, Wenjian LIU, Qiushi XI. 3D tracking algorithm of hypersonic gliding target based on adaptive filtering [J]. Systems Engineering and Electronics, 2022, 44(2): 628-636. |
| [13] | Caihong YUE, Shengjing TANG, Jie GUO, Xiao WANG, Haoqiang ZHANG. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle [J]. Systems Engineering and Electronics, 2021, 43(8): 2232-2243. |
| [14] | Jianguo GUO, Yalu SU. Control system design of adaptive dynamic programming for hypersonic vehicle [J]. Systems Engineering and Electronics, 2021, 43(6): 1628-1635. |
| [15] | Lei XIE, Dali DING, Zhenglei WEI, Andi TANG, Peng ZHANG. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM network [J]. Systems Engineering and Electronics, 2021, 43(6): 1651-1658. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||