Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (8): 2696-2708.doi: 10.12305/j.issn.1001-506X.2024.08.17
• Systems Engineering • Previous Articles
Short-time trajectory deviation detection method for UAV based on trajectory prediction
Gang ZHONG, Jiangying ZHOU, Sen DU, Honghai ZHANG, Hao LIU
- College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
-
Received:2023-06-07Online:2024-07-25Published:2024-08-07 -
Contact:Gang ZHONG
CLC Number:
Cite this article
Gang ZHONG, Jiangying ZHOU, Sen DU, Honghai ZHANG, Hao LIU. Short-time trajectory deviation detection method for UAV based on trajectory prediction[J]. Systems Engineering and Electronics, 2024, 46(8): 2696-2708.
share this article
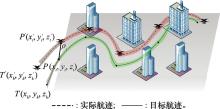
Fig.1
Unmanned aerial vehicle's trajectory deviation"


Fig.2
Technology roadmap"


Fig.3
Schematic diagram of unmanned aerial vehicle trajectory reconstruction"

Fig.4
LSTM's structure"


Fig.5
Bi-LSTM's structure"
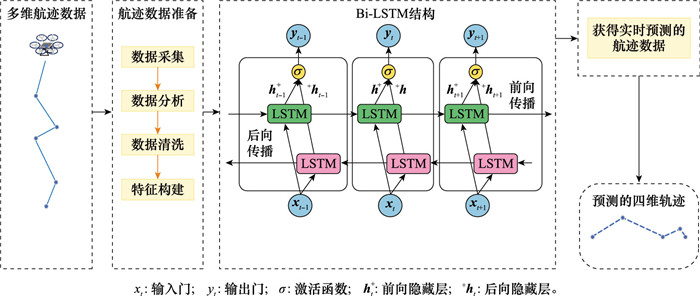

Fig.6
Schematic diagram of local outlier factor outlier detection algorithm"
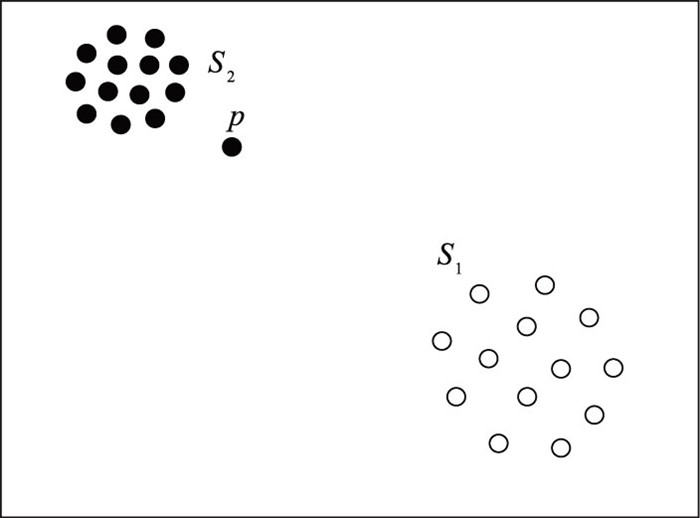
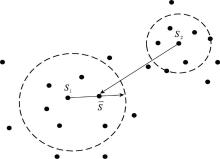
Fig.7
Reachable distance diagram"


Fig.8
Flowchart of ATDM algorithm"

Table 1
Neural network parameters"
| 名称 | 参数 |
| 深度学习框架 | Tensorflow2.2.0 |
| 激活函数 | Sigmoid/Tanh |
| 损失函数 | MSE |
| 优化器 | Adam |
| 网络层数 | 256/128/5 |
| 训练轮次 | 50 |

Fig.9
All unmanned aerial vehicle trajectories"

Table 2
Track point feature information"
| 特征 | 航迹点 |
| 时间 | 5/9/2022 15:39:36 |
| 编号 | 2 |
| 经度/(°) | 118.781 848 31 |
| 纬度/(°) | 31.941 673 23 |
| 高度/m | 27.423 |
| 速度/(m/s) | 0.09 |
| 航向/(°) | 15 |
Table 3
Sample classification table"
| 真实\预测 | 正常航迹 | 异常航迹 |
| 正常航迹 | TP | FN |
| 异常航迹 | FP | TN |

Fig.10
Examples of trajectory interpolation"


Fig.11
MSE's variation with number of iterations"


Fig.12
MSE's variation with predicted time span"

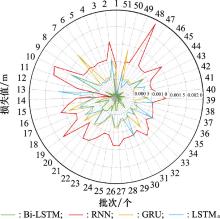
Fig.13
Comparison diagram of MSE for different methods"


Fig.14
Display diagram of four-dimensional trajectory prediction effect"


Fig.15
ATDM output value"
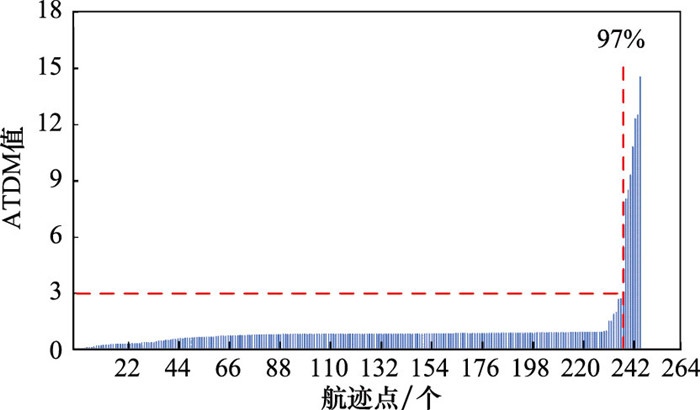
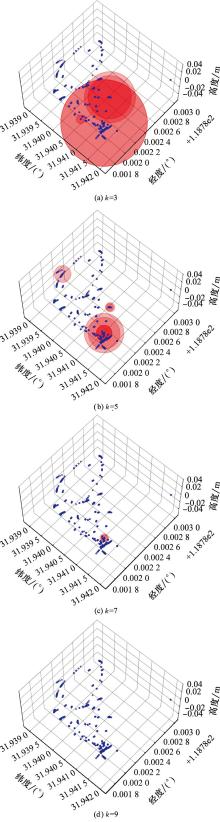
Fig.16
Detection results of abnormal track point"

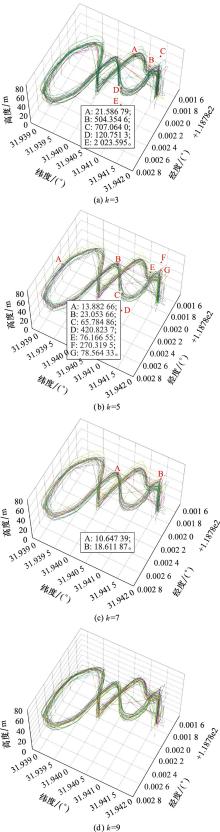
Fig.17
ATDM abnormal point display"

Table 4
Detection accuracy for different k-value"
| 参数 | k取值 | |||
| 3 | 5 | 7 | 9 | |
| 精度 | 0.895 | 0.902 | 0.888 | 0.885 |
| 召回率 | 0.991 | 0.992 | 0.996 | 1 |
| F1得分 | 0.941 | 0.945 | 0.939 | 0.938 |
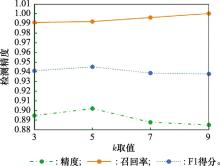
Fig.18
Curve of detection effect versus with k-value"


Fig.19
Curve of detection effect versus time curve"
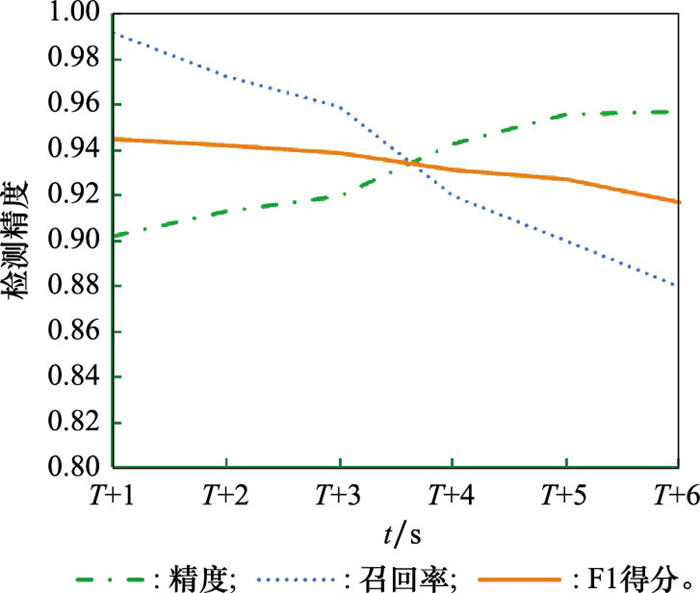
Table 5
Comparison results of various models"
| 参数 | 模型 | |||
| LSTM | SVM | iForest | ATDM | |
| 精度 | 0.892 | 0.872 | 0.901 | 0.902 |
| 召回率 | 0.871 | 0.843 | 0.884 | 0.992 |
| F1得分 | 0.881 | 0.857 | 0.892 | 0.945 |
| 是否需要标注 | 是 | 是 | 否 | 否 |

Fig.20
Comparison diagram of model results"

| 1 |
MENOUAR H , GUVENC I , AKKAYA K , et al. UAV-enabled intelligent transportation systems for the smart city: applications and challenges[J]. IEEE Communications Magazine, 2017, 55 (3): 22- 28.
doi: 10.1109/MCOM.2017.1600238CM |
| 2 | CHEN C M , YE Z , HU F , et al. Vehicle trajectory-clustering method based on road-network-sensitive features[J]. Journal of Intelligent & Fuzzy Systems: Applications in Engineering and Technology, 2021, 41 (1): 2357- 2375. |
| 3 | ZHU T L, XIE D F. Analysis of interdriver heterogeneity based on trajectory data with K-means clustering method[C]//Proc. of the International Conference on Sensor Network and Computer Engineering, 2016: 682-689. |
| 4 |
JIN Y X , NIKITAS N , HU Q Y , et al. Maritime anomaly detection within coastal waters based on vessel trajectory clustering and naive Bayes classifier[J]. Journal of Navigation, 2017, 70 (3): 648- 670.
doi: 10.1017/S0373463316000850 |
| 5 | LIU S J , CHEN G , WEI L , et al. A novel compression approach for truck GPS trajectory data[J]. IET Intelligent Transport Systems, 2020, (5): 74- 83. |
| 6 |
QI L , JI Y Y . Ship trajectory data compression algorithms for automatic identification system: comparison and analysis[J]. Journal of Water Resources and Ocean Science, 2020, 9 (2): 42- 47.
doi: 10.11648/j.wros.20200902.11 |
| 7 |
GAO J B , CAI Z , YU W J , et al. Trajectory data compression algorithm based on ship navigation state and acceleration variation[J]. Journal of Marine Science and Engineering, 2023, 11 (1): 216.
doi: 10.3390/jmse11010216 |
| 8 |
ZHONG G , ZHANG H H , ZHOU J Y , et al. Short-term 4D trajectory prediction for UAV based on spatio-temporal trajectory clustering[J]. IEEE Access, 2022, 10, 93362- 93380.
doi: 10.1109/ACCESS.2022.3203428 |
| 9 |
WU X P , YANG H Y , HU C , et al. Long-term 4D trajectory prediction using generative adversarial networks[J]. Transportation Research Part C: Emerging Technologies, 2022, 136, 103554.
doi: 10.1016/j.trc.2022.103554 |
| 10 | LIN L , LI W Z , BI H K . Vehicle trajectory prediction using LSTMs with spatial-temporal attention mechanisms[J]. IEEE Intelligent Transportation Systems Magazine, 2021, 14 (2): 197- 208. |
| 11 |
HUANG M , WASHINGTONY O , MACIAS J J E , et al. Accuracy evaluation of a new generic trajectory prediction model for unmanned aerial vehicles[J]. Aerospace Science and Technology, 2021, 119, 107160.
doi: 10.1016/j.ast.2021.107160 |
| 12 |
ZHANG H H , YAN Y J , LI S , et al. UAV behavior-intention estimation method based on 4-D flight-trajectory prediction[J]. Sustainability, 2021, 13 (22): 12528.
doi: 10.3390/su132212528 |
| 13 | 刘良旭, 乔少杰, 刘宾, 等. 基于R-Tree的高效异常轨迹检测算法[J]. 软件学报, 2009, 20 (9): 2426- 2435. |
| LIU L X , QIAO S J , LIU B , et al. Efficient trajectory outlier detection algorithm based on R-Tree[J]. Journal of Software, 2009, 20 (9): 2426- 2435. | |
| 14 |
王志森, 张召悦, 冯朝辉, 等. 终端区飞行轨迹聚类分析及异常轨迹识别[J]. 科学技术与工程, 2022, 22 (9): 3807- 3814.
doi: 10.3969/j.issn.1671-1815.2022.09.052 |
|
WANG Z S , ZHANG Z Y , FENG Z H , et al. Cluster analysis and abnormal trajectories of flight trajectory in terminal area[J]. Science and Technology and Engineering, 2022, 22 (9): 3807- 3814.
doi: 10.3969/j.issn.1671-1815.2022.09.052 |
|
| 15 |
吴建华, 吴琛, 刘文, 等. 船舶AIS轨迹异常的自动检测与修复算法[J]. 中国航海, 2017, 40 (1): 8-12, 101.
doi: 10.3969/j.issn.1000-4653.2017.01.003 |
|
WU J H , WU C , LIU W , et al. Automatic detection and restoration algorithm for trajectory anomalies of ship AIS[J]. Navigation of China, 2017, 40 (1): 8-12, 101.
doi: 10.3969/j.issn.1000-4653.2017.01.003 |
|
| 16 |
姜佰辰, 关键, 周伟, 等. 海上交通的船舶异常行为挖掘识别分析[J]. 计算机仿真, 2017, 34 (6): 329- 334.
doi: 10.3969/j.issn.1006-9348.2017.06.071 |
|
JIANG B C , GUAN J , ZHOU W , et al. Vessel abnormal behaviors mining recognition analysis on maritime traffic[J]. Computer Simulation, 2017, 34 (6): 329- 334.
doi: 10.3969/j.issn.1006-9348.2017.06.071 |
|
| 17 | 潘新龙, 王海鹏, 何友, 等. 基于多维航迹特征的异常行为检测方法[J]. 航空学报, 2017, 38 (4): 254- 263. |
| PAN X L , WANG H P , HE Y , et al. Anomalous behavior detection method based on multi-dimensional trajectory characteristics[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38 (4): 254- 263. | |
| 18 |
ZHAO K W , XIE X L , ZHANG X J . Maritime anomaly detection based on a support vector machine[J]. Soft Computing, 2022, 26 (21): 11553- 11566.
doi: 10.1007/s00500-022-07409-w |
| 19 | 刘朋. 基于监视数据的机动区航空器异常行为检测[D]. 天津: 中国民航大学, 2018. |
| LIU P. Abnormal behavior detection for aircraft in maneuvering area based on surveillance data[D]. Tianjin: Civil Aviation University of China, 2018. | |
| 20 | LUO P , WANG B H , LI T Y , et al. ADS-B anomaly data detection model based on VAE-SVDD[J]. Computers & Security, 2021, 104, 102213. |
| 21 |
JI Y F , WANG L W , WU W L , et al. A method for LSTM-based trajectory modeling and abnormal trajectory detection[J]. IEEE Access, 2020, 8, 104063- 104073.
doi: 10.1109/ACCESS.2020.2997967 |
| 22 | NING S G , SUN J Z , LIU C , et al. Applications of deep learning in big data analytics for aircraft complex system anomaly detection[J]. Journal of Risk and Reliability, 2021, 235 (5): 923- 940. |
| 23 |
CAO Y P , CAO J W , ZHOU Z G , et al. Aircraft track anomaly detection based on MOD-Bi-LSTM[J]. Electronics, 2021, 10 (9): 1007.
doi: 10.3390/electronics10091007 |
| 24 |
XIAO K , ZHAO J Y , HE Y H , et al. Abnormal behavior detection scheme of UAV using recurrent neural networks[J]. IEEE Access, 2019, 7, 110293- 110305.
doi: 10.1109/ACCESS.2019.2934188 |
| 25 | LEI P R . A framework for anomaly detection in maritime tra-jectory behavior[J]. Knowledge & Information Systems, 2016, 47, 189- 214. |
| 26 | WANG Y K , LIU J X , LIU R W , et al. Data-driven methods for detection of abnormal ship behavior: progress and trends[J]. Ocean Engineering, 2023, 271 (1): 113673. |
| 27 | LIU H D , LIU Y , LI B , et al. Ship abnormal behavior detection method based on optimized GRU network[J]. Journal of Marine Science and Engineering, 2022, 110 (2): 249- 259. |
| 28 | GUO S Q , MOU J M , CHEN L Y , et al. An anomaly detection method for AIS trajectory based on kinematic interpolation[J]. Journal of Marine Science and Engineering, 2021, 2 (6): 609. |
| 29 |
WANG X L , WANG Q . An abnormal traffic detection method using GCN-Bi-LSTM-attention in the internet of vehicles environment[J]. EURASIP Journal on Wireless Communications and Network, 2023, 2023, 70.
doi: 10.1186/s13638-023-02274-z |
| 30 | YU W . Research on feature extraction of vehicle abnormal driving behaviour based on 5G internet of vehicles[J]. International Journal of Vehicle Design, 2021, 86 (1/4): 124- 142. |
| 31 | LI C N , FENG G W , JIA Y R . RETAD: vehicle trajectory anomaly detection based on reconstruction error[J]. International Journal of Data Warehousing and Mining, 2023, 19 (2): 316460. |
| 32 | ZHAO X J , SU J H , CAI J H , et al. Vehicle anomalous trajectory detection algorithm based on road network partition[J]. Applied Intelligence, 2021, 52 (8): 8820- 8838. |
| 33 | HUANG S E , FENG Y , LIU H X . A data-drivenmethod for falsified vehicle trajectory identification by anomaly detection[J]. Transportation Research Part C: Emerging Technologies, 2021, 128 (6): 103196. |
| 34 |
CORRADO S J , PURANIKN T G , FISCHER O P , et al. A clustering-based quantitative analysis of the interdependent relationship between spatial and energy anomalies in ADS-B trajectory data[J]. Transportation Research Part C: Emerging Technologies, 2021, 131, 103331.
doi: 10.1016/j.trc.2021.103331 |
| [1] | Xiaochen ZHAO, Dongtao ZHAO, Hang YUAN, Huan WANG, Qun ZHANG. Micro-motion parameters extraction for UAV under LPRF condition [J]. Systems Engineering and Electronics, 2024, 46(5): 1503-1513. |
| [2] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [3] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [4] | Wenhao BI, Mengqi ZHANG, Fei GAO, Mi YANG, An ZHANG. Review on UAV swarm task allocation technology [J]. Systems Engineering and Electronics, 2024, 46(3): 922-934. |
| [5] | Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(3): 942-952. |
| [6] | Cheng GAO, Yanli DU, Yunong BU, Yanbin LIU, Yufei WANG. Heterogeneous UAV swarm grouping deployment for complex multiple tasks [J]. Systems Engineering and Electronics, 2024, 46(3): 972-981. |
| [7] | Liguan PEI, Wei ZHOU, Jingdong LIU. Research on arrangement method of motorized chaff screen based on cuckoo bird search algorithm [J]. Systems Engineering and Electronics, 2024, 46(3): 814-823. |
| [8] | Yong YANG, Xuesong WANG. Analysis of radar detection performance for UAV based on clutter tail distribution [J]. Systems Engineering and Electronics, 2024, 46(1): 113-120. |
| [9] | Zhenya YANG, Zhi ZHANG, Xiaobing SHANG, Zejun CAO, Zhexuan SUN. Vessel trajectory prediction based on improved multi-output support vector [J]. Systems Engineering and Electronics, 2024, 46(1): 173-181. |
| [10] | Wanyan HUANG, Wanhe DU, Shuzhen YANG, Tao YU. Trajectory prediction algorithm based on improved polynomial curve fitting [J]. Systems Engineering and Electronics, 2024, 46(1): 280-289. |
| [11] | Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU. Destination prediction of UAV cluster trajectory based on EMD-DESN [J]. Systems Engineering and Electronics, 2024, 46(1): 290-299. |
| [12] | Zhongbao WANG, Kuiying YIN. Block effect suppression method of UAV-borne SAR image based on joint domain filtering [J]. Systems Engineering and Electronics, 2023, 45(9): 2768-2776. |
| [13] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [14] | Yufeng LIANG, Jingchao ZHAO, Wangkui LIU, Lei WANG, Shipeng WANG, Shilong RUAN. Air combat guidance method based on top rolling optimization and bottom tracking [J]. Systems Engineering and Electronics, 2023, 45(9): 2866-2872. |
| [15] | Huizhu HAN, Yangchao HUANG, Hang HU, Qi AN, Shihao LIU. Energy-spectrum efficiency trade-off optimization based on short packet transmission in UAV communication [J]. Systems Engineering and Electronics, 2023, 45(9): 2956-2964. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||