Systems Engineering and Electronics ›› 2023, Vol. 46 ›› Issue (1): 280-289.doi: 10.12305/j.issn.1001-506X.2024.01.32
• Guidance, Navigation and Control • Previous Articles
Trajectory prediction algorithm based on improved polynomial curve fitting
Wanyan HUANG1, Wanhe DU1,2,*, Shuzhen YANG1,2, Tao YU1
- 1. School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200444, China
2. School of Intelligent Manufacturing and Control Engineering, Shanghai Polytechnic University, Shanghai 201209, China
-
Received:2022-09-27Online:2023-12-28Published:2024-01-11 -
Contact:Wanhe DU
CLC Number:
Cite this article
Wanyan HUANG, Wanhe DU, Shuzhen YANG, Tao YU. Trajectory prediction algorithm based on improved polynomial curve fitting[J]. Systems Engineering and Electronics, 2023, 46(1): 280-289.
share this article

Fig.1
Schematic diagram of trajectory discretization"
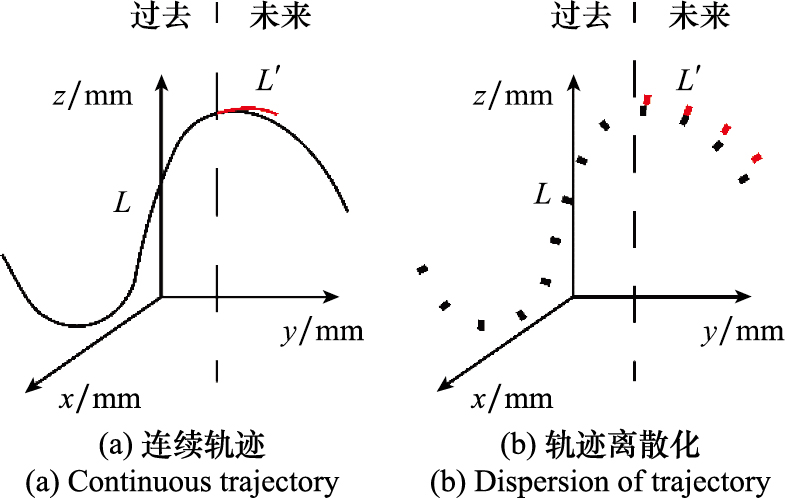

Fig.2
Schematic diagram of the trajectory prediction model"


Fig.3
Schematic diagram of trajectory dynamic prediction model"
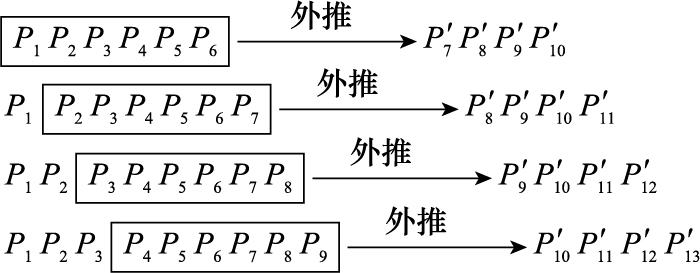

Fig.4
Trajectory prediction schematic diagram with the reduced sampling interval"


Fig.5
Comparison of error of two adjacent prediction points"
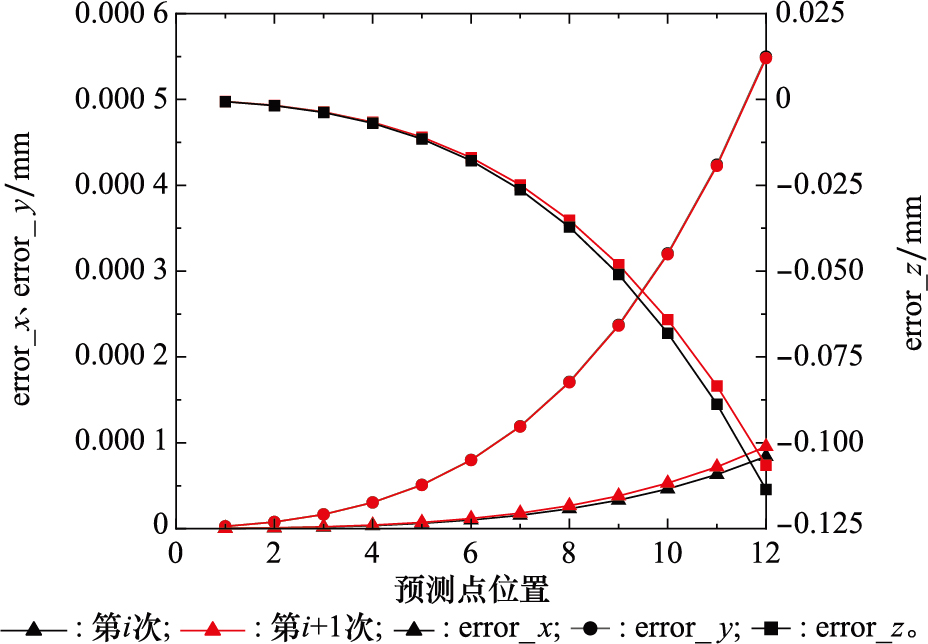

Fig.6
Double error prediction value update schematic diagram in single-step prediction"
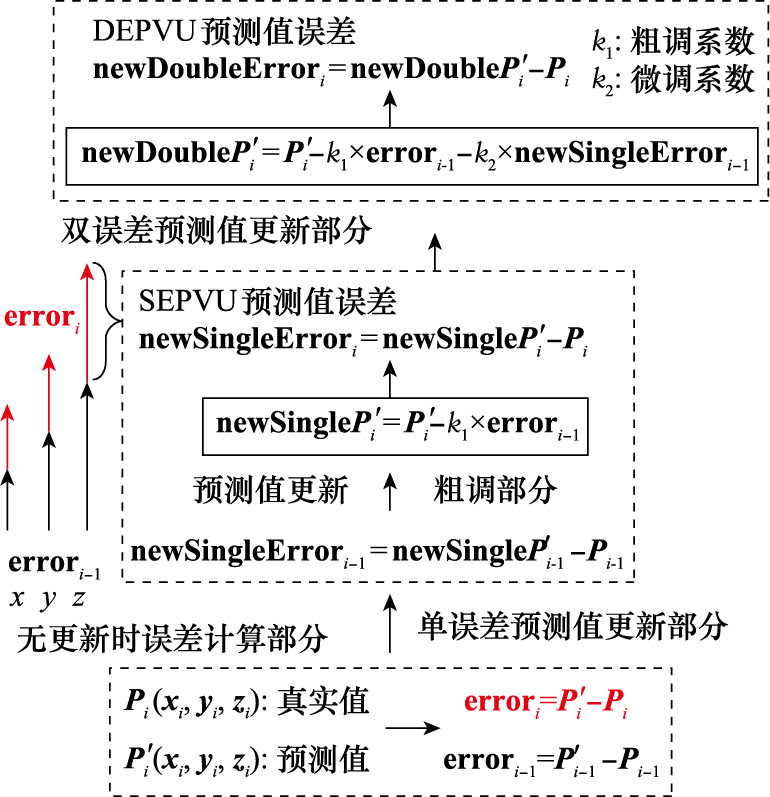

Fig.7
Process of error value extraction in step i-1 in multi-step prediction (k=3)"


Fig.8
Flowchart of IPCFTPA"

Table 1
Three types of simulation data and their descriptions"
| 数据 | 参数方程 | 描述 |
| 1 | t∈[0, 2π] | |
| 2 | / | 3次B样条曲线, 点数230 |
| 3 | t∈[0, 8π] 点数为300 |

Fig.9
3D diagram of simulation data"


Fig.10
Real 3D trajectory"


Fig.11
Preprocessed trajectory"
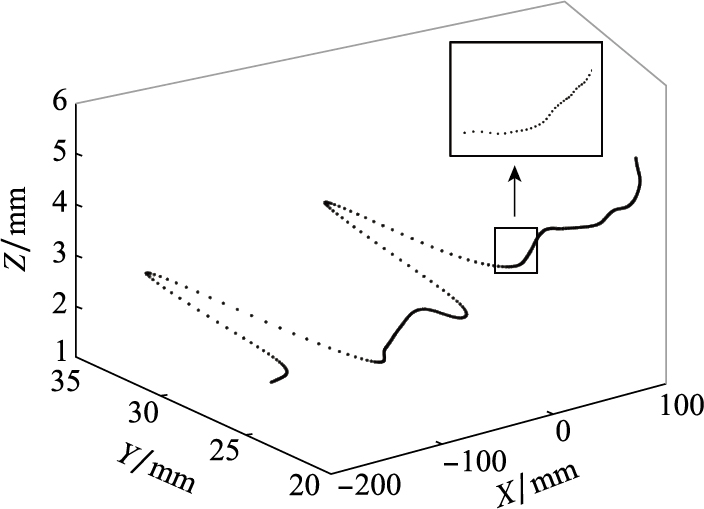

Fig.12
Trajectory prediction with different fitting orders"
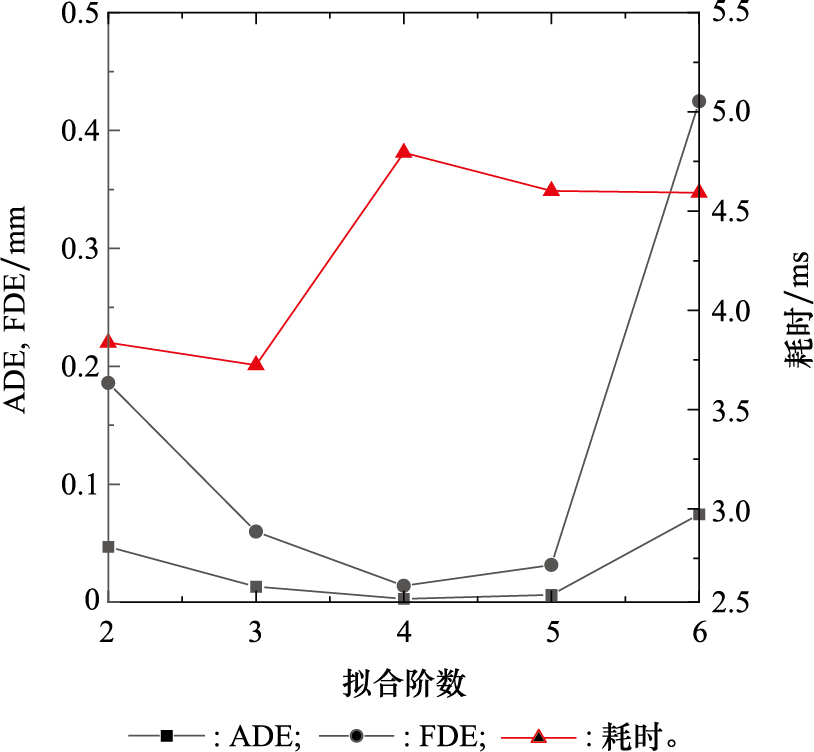

Fig.13
Influence of adjustment coefficient on trajectory prediction"
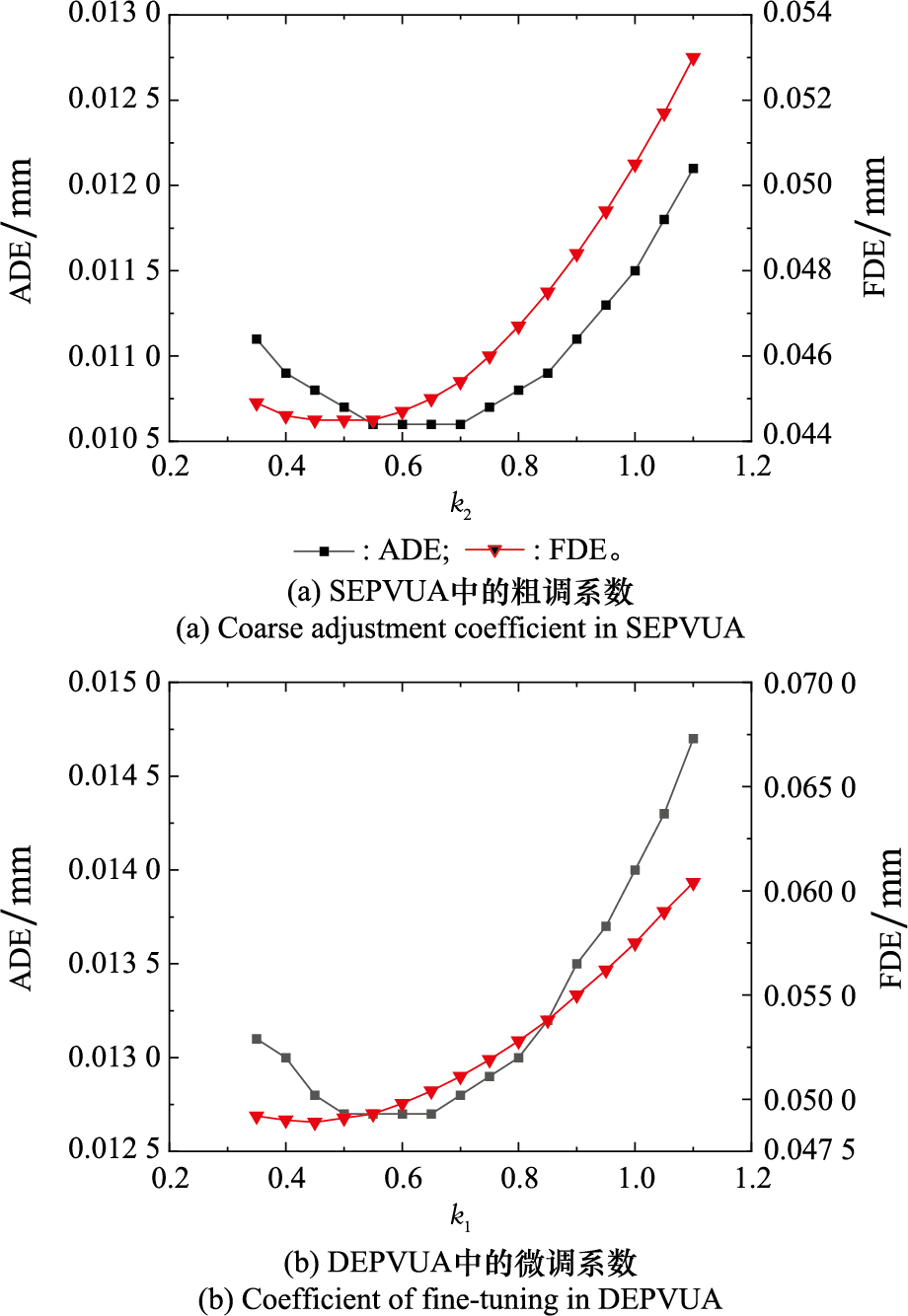
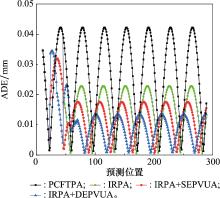
Fig.14
ADE situation of different algorithms at different positions in simulation data 1"

Fig.15
Trajectory prediction with different prediction steps by different methods in simulation data 1"
Table 2
Simulation data 2 prediction of different methods"
| 算法 | ADE/mm | FDE/mm | 耗时/ms |
| IPCFTPA | 0.004 4 | 0.015 9 | 3.902 3 |
| PCFTPA | 0.008 2 | 0.027 0 | 0.737 3 |
| KF | 2.910 6 | 3.403 9 | 0.602 4 |
| BPNN | 0.057 5 | 0.181 2 | 1 130.530 0 |
| LSTM | 1.971 4 | 4.581 6 | 8 519.360 0 |
Table 3
Simulation data 3 prediction of different methods"
| 算法 | ADE/mm | FDE/mm | 耗时/ms |
| IPCFTPA | 0.323 3 | 1.150 6 | 1.837 3 |
| PCFTPA | 0.558 3 | 1.827 8 | 0.754 8 |
| KF | 9.896 5 | 11.63 | 0.786 9 |
| BPNN | 1.107 4 | 3.312 | 1 460.910 0 |
| LSTM | 6.096 7 | 12.988 | 3 656.130 0 |
Table 4
Real data 1 prediction of different methods"
| 算法 | ADE/mm | FDE/mm | 耗时/ms |
| IPCFTPA | 0.864 7 | 2.167 3 | 3.833 2 |
| PCFTPA | 1.539 5 | 4.294 9 | 0.750 8 |
| KF | 3.384 1 | 3.899 3 | 0.889 5 |
| BPNN | 1.228 1 | 2.722 1 | 1 450.820 0 |
| LSTM | 4.968 1 | 10.324 | 6 919.180 0 |
Table 5
ADE and FDE decreasement rate of IPCFTPA of different data compared with PCFTPA %"
| 数据 | KADE | KFDE |
| 仿真数据1 | 59.70 | 48.07 |
| 仿真数据2 | 46.34 | 32.65 |
| 仿真数据3 | 42.09 | 37.05 |
| 仿真数据均值 | 49.38 | 39.26 |
| 真实数据1 | 43.83 | 49.54 |
| 真实数据2 | 32.99 | 26.78 |
| 真实数据3 | 31.64 | 25.64 |
| 真实数据均值 | 36.15 | 33.99 |
| 总均值 | 42.77 | 36.62 |
| 1 |
HAO X , HUYNH D Q , REYNOLDS M . PoPPL: pedestrian trajectory prediction by LSTM with automatic route class clustering[J]. IEEE Trans. on Neural Networks and Learning Systems, 2021, 32 (1): 77- 90.
doi: 10.1109/TNNLS.2020.2975837 |
| 2 |
YOON Y , KIM T , LEE H , et al. Road-aware trajectory prediction for autonomous driving on highways[J]. Sensors, 2020, 20 (17): 4703.
doi: 10.3390/s20174703 |
| 3 | WU Z Y, CAO Z Q, YU Y Y, et al. A multi-robot cooperative hunting approach based on the dynamic prediction of target motion[C]//Proc. of the IEEE International Conference on Robo-tics and Biomimetics, 2017: 587-592. |
| 4 | DUAN Y, HUANG X, YU X. Multi-robot dynamic virtual potential point hunting strategy based on FIS[C]//Proc. of the IEEE Chinese Guidance, Navigation and Control Conference, 2016: 332-335. |
| 5 | 刘文, 胡琨林, 李岩, 等. 移动目标轨迹预测方法研究综述[J]. 智能科学与技术学报, 2021, 3 (2): 149- 160. |
| LIU W , HU K L , LI Y , et al. A review of prediction methods for moving target trajectories[J]. Chinese Journal of Intelligent Science and Technology, 2021, 3 (2): 149- 160. | |
| 6 |
LEON F , GAVRILESCU M . A review of tracking and trajectory prediction methods for autonomous driving[J]. Mathematics, 2021, 9 (6): 660.
doi: 10.3390/math9060660 |
| 7 | 胡俊, 朱庆保. 基于动态预测目标轨迹和围捕点的多机器人围捕算法[J]. 电子学报, 2011, 39 (11): 2480- 2485. |
| HU J , ZHU Q B . A multi-robot hunting algorithm based on dynamic prediction for trajectory of the moving target and hunting points[J]. Acta Electronica Sinica, 2011, 39 (11): 2480- 2485. | |
| 8 | 张强, 张振标. 基于曲线拟合的机动目标轨迹预测算法研究[J]. 信息化研究, 2018, 44 (6): 12-15, 30. |
| ZHANG Q , ZHANG Z B . Research of maneuvering target tra-jectory prediction based on curve fitting[J]. Informatization Research, 2018, 44 (6): 12-15, 30. | |
| 9 | 李世杰, 雷虎民, 周池军, 等. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42 (10): 2320- 2327. |
| LI S J , LEI H M , ZHOU C J , et al. Trajectory prediction algorithm for hypersonic reentry gliding target based on control variables estimation[J]. Systems Engineering and Electronics, 2020, 42 (10): 2320- 2327. | |
| 10 |
CAO X , XU X Y . Hunting algorithm for multi-AUV based on dynamic prediction of target trajectory in 3D underwater environment[J]. IEEE Access, 2020, 8, 138529- 138538.
doi: 10.1109/ACCESS.2020.3013032 |
| 11 | WANG Z J, NIE Z Q, SHENG G. Dynamic position predicting of underactuated surface vessel with unscented Kalman filter[C]// Proc. of the 2018 Chinese Automation Congress, 2018: 4030-4033. |
| 12 |
GUO G , ZHAO S J . 3D multi-object tracking with adaptive cubature Kalman filter for autonomous driving[J]. IEEE Trans. on Intelligent Vehicles, 2023, 8 (1): 512- 519.
doi: 10.1109/TIV.2022.3158419 |
| 13 |
MOHAMMAD Z , HOSSEIN G Y , MEHRAN Y . Real-time object tracking based on an adaptive transition model and extended Kalman filter to handle full occlusion[J]. The Visual Computer, 2020, 36 (4): 701- 715.
doi: 10.1007/s00371-019-01652-3 |
| 14 |
ABBAS M T , JIBRAN M A , AFAQ M , et al. An adaptive approach to vehicle trajectory prediction using multimodel Kalman filter[J]. IEEE Trans. on Emerging Telecommunications Technologies, 2020, 31 (5): 3734.
doi: 10.1002/ett.3734 |
| 15 |
THIPPHAVONG D P , SCHULTZ C A , LEE A G , et al. Adaptive algorithm to improve trajectory prediction accuracy of climbing aircraft[J]. Journal of Guidance, Control, and Dynamics, 2013, 36 (1): 15- 24.
doi: 10.2514/1.58508 |
| 16 |
HAN X , TIAN C . Estimation of buoy drifting based on adaptive parameter-varying time scale Kalman filter[J]. Journal of Control and Decision, 2021, 8 (3): 353- 362.
doi: 10.1080/23307706.2020.1808863 |
| 17 |
WU Z J , TIAN S , MA L . A 4D trajectory prediction model based on the BP neural network[J]. Journal of Intelligent Systems, 2019, 29 (1): 1545- 1557.
doi: 10.1515/jisys-2019-0077 |
| 18 |
CHEN K , SONG X , REN X X . Pedestrian trajectory prediction in heterogeneous traffic using pose keypoints-based convolutional encoder-decoder network[J]. IEEE Trans. on Circuits and Systems for Video Technology, 2021, 31 (5): 1764- 1775.
doi: 10.1109/TCSVT.2020.3013254 |
| 19 | LI S, ZHI Y, MELLADO S, et al. 3DOF pedestrian trajectory prediction learned from long-term autonomous mobile robot deployment data[C]//Proc. of the IEEE International Conference on Robotics & Automation, 2018: 5942-5948. |
| 20 | ALTCHE F, FORTELLE A. A LSTM network for highway trajectory prediction[C]//Proc. of the IEEE 20th International Conference on Intelligent Transportation Systems, 2017: 353-359. |
| 21 | ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: human trajectory prediction in crowded spaces[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 961-971. |
| 22 | ZHANG Y H , WEI W , YU D , et al. A tracking and predicting scheme for ping pong robot[J]. Journal of Zhejiang University-Science C(Computers & Electronics), 2011, 12 (2): 110- 115. |
| 23 |
AKABANE R , KATO Y . Pedestrian trajectory prediction based on transfer learning for human-following mobile robots[J]. IEEE Access, 2021, 9, 126172- 126185.
doi: 10.1109/ACCESS.2021.3111917 |
| 24 |
YANG J , SUN X , WANG R G , et al. PTPGC: pedestrian trajectory prediction by graph attention network with Conv- LSTM[J]. Robotics and Autonomous Systems, 2022, 148, 103931.
doi: 10.1016/j.robot.2021.103931 |
| 25 |
SHANNON C . A symbolic analysis of relay and switching circuits[J]. Electrical Engineering, 1938, 57 (12): 713- 723.
doi: 10.1109/EE.1938.6431064 |
| 26 | POSTNIKOV A, GAMAYUNOV A, FERRER G. Transformer based trajectory prediction[C]//Proc. of the 35th Conference on Neural Information Processing Systems, 2021. |
| 27 | ZHU Z R , WU J W , YAN R , et al. Cutting force prediction considering tool path curvature and torsion based on screw theory[J]. The International Journal of Advanced Manufacturing Technology, 2021, 114 (5/6): 1601- 1621. |
| 28 |
PAGANI L , SCOTT P . Curvature based sampling of curves and surfaces[J]. Computer Aided Geometric Design, 2018, 59, 32- 48.
doi: 10.1016/j.cagd.2017.11.004 |
| 29 |
LU L Z , ZHAO S Q . High-quality point sampling for B-spline fitting of parametric curves with feature recognition[J]. Journal of Computational and Applied Mathematics, 2019, 345, 286- 294.
doi: 10.1016/j.cam.2018.04.008 |
| 30 |
YE X Y , ZHU S P , CHEN S . Research on model predictive trajectory following control of automatic vehicle considering prediction error[J]. International Journal of Wireless and Mobile Computing: IJWMC, 2021, 21 (1): 52- 58.
doi: 10.1504/IJWMC.2021.119062 |
| 31 |
VICTOR P , TOMOYUKI M . Smooth curve fitting of mobile robot trajectories using differential evolution[J]. IEEE Access, 2020, 8, 82855- 82866.
doi: 10.1109/ACCESS.2020.2991003 |
| 32 | YAN W, SUNA Y. Three-dimensional curve fitting based on cubic B-spline interpolation curve[C]//Proc. of the 7th International Congress on Image and Signal Processing, 2014: 765-770. |
| 33 | ZHENG F, FANG F, MA X D. Trajectory sampling and fitting restoration based on machine vision for robot fast teaching[C]// Proc. of the 15th IEEE Conference on Industrial Electronics and Applications, 2020: 604-609. |
| [1] | Ruixian HU, Zhao ZHANG, Cheng LUO. A baseline optimization method for distributive satellites system [J]. Systems Engineering and Electronics, 2023, 45(8): 2423-2437. |
| [2] | Feng ZHA, Qiushuo WEI, Hongyang HE, Bao LI. Biaxial rotation scheme based on diagonal rotation of IMU body [J]. Systems Engineering and Electronics, 2023, 45(8): 2546-2554. |
| [3] | Xu CHEN, Yao XIAO, Lingyu YANG, Jing ZHANG. Stability analysis of radome parasitic loop based on simplified model [J]. Systems Engineering and Electronics, 2023, 45(6): 1784-1796. |
| [4] | Yuqing ZHENG, Xiaofeng AI, Zhiming XU, Feng ZHAO, Yong YANG. Target parameters estimation of FSR net based on crossing times [J]. Systems Engineering and Electronics, 2023, 45(5): 1323-1332. |
| [5] | Xiaoyan NING, Shukai LI, Zhenduo WANG, Dongxu ZHAO. Information mapping LPI communication waveform under time-varying parameters [J]. Systems Engineering and Electronics, 2023, 45(5): 1526-1534. |
| [6] | Chao LI, Yiwen JIAO, Shiyuan FU, Zefu GAO, Feilong MAO. GPU-based digital down-conversion cumulative error control method [J]. Systems Engineering and Electronics, 2023, 45(4): 965-972. |
| [7] | Bo TANG, Jiaqi LU, Kunyi GUO, Congjun JIN, Xinqing SHENG. Feeding coefficient correction and anisotropy analysis for the near field effect of triad [J]. Systems Engineering and Electronics, 2023, 45(3): 647-653. |
| [8] | Bei LIU, Shaofeng BIAN, Bing JI, Pengfei XIAN. Application of wavelet transform in shipborne ocean gravimetry data processing and analysis [J]. Systems Engineering and Electronics, 2023, 45(3): 654-659. |
| [9] | Yuhao ZHANG, Shengqi ZHU, Cao ZENG, Sen CUI, Qijian SHI. Mainlobe range deceptive jamming suppression approach with EPC-MIMO radar [J]. Systems Engineering and Electronics, 2023, 45(3): 690-698. |
| [10] | Shizhe WANG, Zongji LI, Pingbo WANG, Yuchen SUN. Location error analysis of impact point at sea based on dual cross-array [J]. Systems Engineering and Electronics, 2023, 45(3): 839-847. |
| [11] | Botao SONG, Guangliang XU. Missile trajectory prediction method based on LSTM and 1DCNN [J]. Systems Engineering and Electronics, 2023, 45(2): 504-512. |
| [12] | Xiaoyan NING, Ying WANG, Zhiguo SUN, Hailing LUO. Performance analysis of Nakagami-m channel transmission Link16 under multi-tone interference [J]. Systems Engineering and Electronics, 2023, 45(2): 566-571. |
| [13] | Kaidi JIN, Hongzhou CHAI, Chuhan SU, Minzhi XIANG, Ming LI. State transformation Kalman filter for DVL/SINS integral navigation system [J]. Systems Engineering and Electronics, 2023, 45(11): 3624-3631. |
| [14] | Hongqiong TANG, Jiangning XU, Wence SHI, Hongyang HE, Fangneng LI. Davenport quaternion DVL calibration method based on position observation information [J]. Systems Engineering and Electronics, 2023, 45(11): 3640-3648. |
| [15] | Zhongyue LI, Tong WANG. Sparse Bayesian learning-based robust STAP algorithm [J]. Systems Engineering and Electronics, 2023, 45(10): 3032-3040. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||