Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (5): 1767-1776.doi: 10.12305/j.issn.1001-506X.2024.05.29
• Guidance, Navigation and Control • Previous Articles
Research on UAV path planning method based on the multi-precision planning windows
Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG
- Computational Aerodynamics Institute, China Aerodynamics Research and Development Center, Mianyang 621000, China
-
Received:2023-03-15Online:2024-04-30Published:2024-04-30 -
Contact:Enmi YONG
CLC Number:
Cite this article
Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows[J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776.
share this article

Fig.1
Sketch map for unmanned aerial vehicles trajectories"
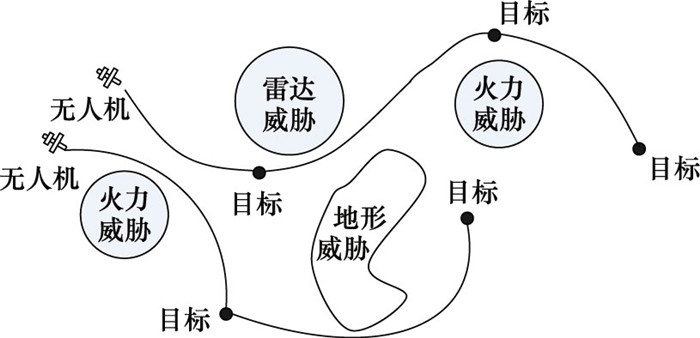

Fig.2
Sketch map of flying for rounding the threat area"


Fig.3
Example of the grid division"


Fig.4
Diagram of the unmanned aerial vehicle trajectory"


Fig.5
Selection of the candidate nodes"


Fig.6
Implementation ideas of the multi-precision planning window"


Fig.7
Schematic diagram of the multi-precision planning window"
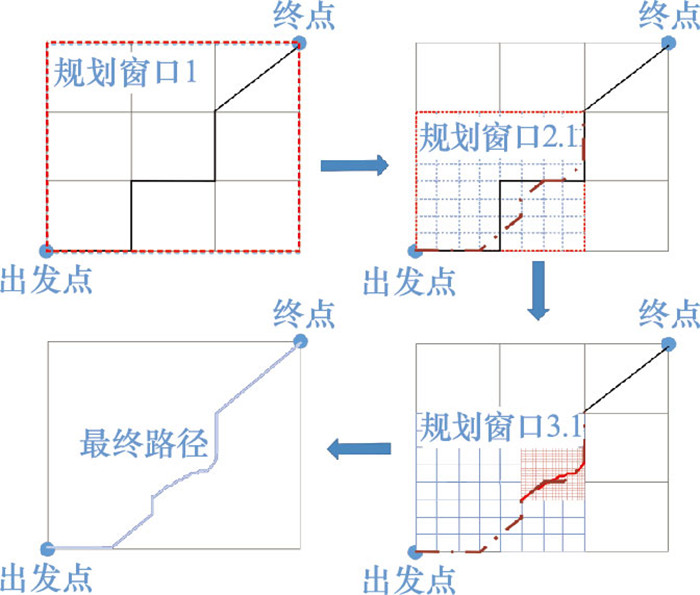
Table 1
Distribution of the threats"
| 坐标参数 | 雷达 | 火力 | 地形 | 气象 | 禁飞区 | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||||
| X轴坐标/km | 520 | 460 | 200 | 420 | 340 | 120 | 80 | 240 | 320 | 420 | ||||
| Y轴坐标/km | 260 | 500 | 540 | 100 | 340 | 80 | 360 | 400 | 200 | 340 | ||||
| 威胁半径/km | 120 | 120 | 120 | 100 | 100 | 10 | 10 | 10 | 10 | 10 | ||||
Table 2
Parameters setting of the ACO"
| 参数 | 数值 |
| 种群数量 | 100 |
| α | 1 |
| β | 7 |
| ρ | 0.3 |
| Q | 10 |
| 最大迭代次数 | 400 |
Table 3
Optimization results of planning window A (grid precision is 20 km×20 km)"
| 参数 | 算例编码 | ||
| A-1 | A-2 | A-3 | |
| w1 | 0.8 | 0.5 | 0.2 |
| w2 | 0.2 | 0.5 | 0.8 |
| 航程/km | 539.41 | 539.41 | 539.41 |
| 归一化航程 | 0.899 | 0.899 | 0.899 |
| 威胁代价 | 0 | 0 | 0 |
| 归一化威胁 | 0 | 0 | 0 |
| 总代价 | 0.719 2 | 0.449 5 | 0.179 8 |
Table 4
Optimization results of planning window B (grid precision is 20 km×20 km)"
| 参数 | 算例编码 | ||
| B-1 | B-2 | B-3 | |
| w1 | 0.8 | 0.5 | 0.2 |
| w2 | 0.2 | 0.5 | 0.8 |
| 航程/km | 366.27 | 382.842 7 | 411.13 |
| 归一化航程 | 0.610 5 | 0.638 1 | 0.685 2 |
| 威胁代价 | 4.030 9 | 3.679 9 | 3.465 9 |
| 归一化威胁 | 0.806 2 | 0.736 0 | 0.693 2 |
| 总代价 | 0.649 6 | 0.687 0 | 0.691 6 |

Fig.8
Optimization result of case A-1"


Fig.9
Optimization result of case A-2"


Fig.10
Optimization result of case A-3"

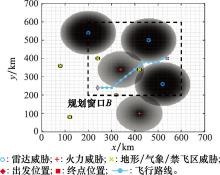
Fig.11
Optimization result of case B-1"

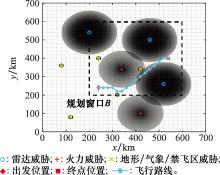
Fig.12
Optimization result of case B-2"


Fig.13
Optimization result of case B-3"


Fig.14
Comparison diagram of optimization iteration convergency"

Table 5
Optimization results of planning window A with different precision"
| 参数 | 算例编码 | ||
| A-4 | A-5(即A-2) | A-6 | |
| 精度/km | 40×40 | 20×20 | 10×10 |
| 规划时间/s | 21.70 | 27.46 | 107.71 |
| 航程/km | 555.98 | 539.41 | 563.553 4 |
| 归一化航程 | 0.926 6 | 0.899 0 | 0.939 3 |
| 威胁代价 | 0.428 0 | 0 | 0.367 9 |
| 归一化威胁 | 0.042 8 | 0 | 0.036 8 |
| 总代价 | 0.484 7 | 0.449 5 | 0.488 0 |
Table 6
Optimization results of planning window B with different precision"
| 参数 | 算例编码 | ||
| B-4 | B-5(即B-2) | B-6 | |
| 精度/km | 40×40 | 20×20 | 10×10 |
| 规划时间/s | 10.78 | 29.35 | 131.76 |
| 航程/km | 346.274 2 | 382.842 7 | 440.416 3 |
| 归一化航程 | 0.577 1 | 0.638 1 | 0.734 0 |
| 威胁代价 | 1.977 8 | 3.679 9 | 5.520 7 |
| 归一化威胁 | 0.791 1 | 0.736 0 | 0.552 1 |
| 总代价 | 0.684 1 | 0.687 0 | 0.643 0 |

Fig.15
Optimization result of case A-4"
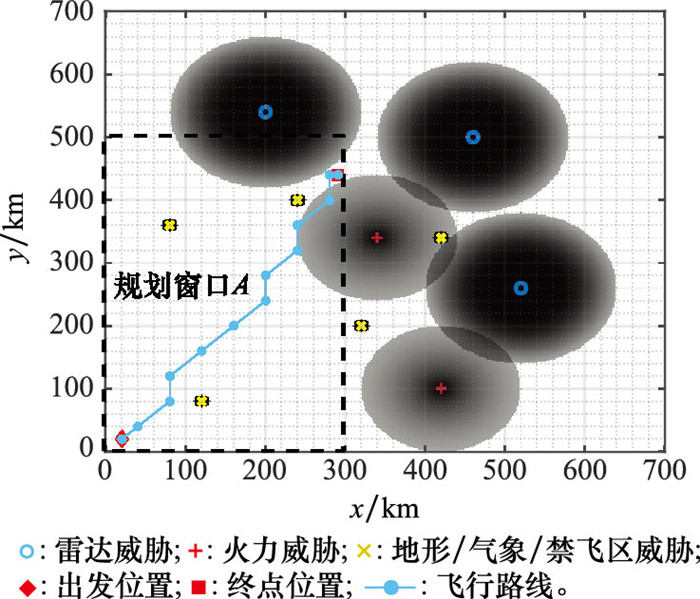

Fig.16
Optimization result of case A-6"

Fig.17
Optimization result of case B-4"


Fig.18
Optimization result of case B-6"


Fig.19
Optimization result of trajectory for multi-precision window"


Fig.20
Partial enlarged detail of the trajectory optimization for multi-precision window"

| 1 | 霍霄华. 多UCAV动态协同任务规划建模与滚动优化方法研究[D]. 长沙: 国防科技大学, 2007. |
| HUO X H. Research on modeling and rolling optimization methods for multi-UCAV dynamic cooperative mission planning[D]. Changsha: National University of Defense Technology, 2007. | |
| 2 |
路晶, 史宇, 张书畅, 等. 无人机航迹规划算法综述[J]. 航空计算技术, 2022, 52 (4): 131- 134.
doi: 10.3969/j.issn.1671-654X.2022.04.030 |
|
LU J , SHI Y , ZHANG S C , et al. A review of UAV trajectory planning algorithms[J]. Aeronautical Computing Technique, 2022, 52 (4): 131- 134.
doi: 10.3969/j.issn.1671-654X.2022.04.030 |
|
| 3 | 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35 (3): 593- 606. |
| SHEN L C , CHEN J , WANG N . Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35 (3): 539- 606. | |
| 4 | 陈守凤. 基于改进人工势场法的多无人机协同航迹规划算法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017. |
| CHEN S F. An improved artificial potential field based path planning algorithm for cooperative collision of multiple unmanned aerial vehicles[D]. Harbin: Harbin Institute of Technology, 2017. | |
| 5 | 张帅, 李学仁, 张鹏, 等. 基于改进A* 算法的无人机航迹规划[J]. 飞行力学, 2016, 34 (3): 39- 43. |
| ZHANG S , LI X R , ZHANG P , et al. UAV path planning based on improved A* algorithm[J]. Flight Dynamics, 2016, 34 (3): 39- 43. | |
| 6 |
VINCENT R , MOHAMMED T , GILLES L . Comparison of parallel genetic algorithm and particle swarm optimization for realtime UAV path planning[J]. IEEE Trans.on Industrial Informatics, 2013, 9 (1): 132- 141.
doi: 10.1109/TII.2012.2198665 |
| 7 | 范林玉. 航迹规划遗传模拟退火算法研究[D]. 重庆: 重庆大学, 2010. |
| FANG L Y. Flight path plan research based on genetic and simulated annealing algorithm[D]. Chongqing: Chongqing University, 2010. | |
| 8 | 陆天和, 刘莉, 贺云涛, 等. 多无人机航迹规划算法及关键技术[J]. 战术导弹技术, 2020, (1): 85- 90. |
| LU T H , LIU L , HE Y T , et al. Multi-UAV path planning algorithm and key technology[J]. Tactical Missile Technology, 2020, (1): 85- 90. | |
| 9 | HOANG V T, PHUNG M D, DINH T H, et al. Angle-encoded swarm optimization for UAV formation path planning[C]//Proc. of the IEEE International Conference on Intelligent Robots and Systems, 2018: 5239-5244. |
| 10 |
SHAO Z , YAN F , ZHOU Z , et al. Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization[J]. Applied Sciences, 2019, 9, 2621.
doi: 10.3390/app9132621 |
| 11 | GAMBARDELLA L M, DORIGO M. ANT-Q: a reinforcement learning approach to the traveling salesman problem[C]//Proc. of the 12th International Conference on Machine Learning, 1995: 252-260. |
| 12 |
段海滨, 王道波. 蚁群算法的全局收敛性研究及改进[J]. 系统工程与电子技术, 2004, 26 (10): 1506- 1509.
doi: 10.3321/j.issn:1001-506X.2004.10.049 |
|
DUAN H B , WANG D B . Research and improvement on the global convergence of ant colony algorithm[J]. Systems Engineering and Electronics, 2004, 26 (10): 1506- 1509.
doi: 10.3321/j.issn:1001-506X.2004.10.049 |
|
| 13 | 肖绍. 基于改进蚁群算法的无人机航迹规划研究[D]. 南昌: 南昌航空大学, 2016. |
| XIAO S. The research for route planning of UAV based on improved ant colony algorithm[D]. Nanchang: Nanchang Hangkong University, 2016. | |
| 14 | 陈冬. 基于粒子群优化算法的无人机航迹规划[D]. 西安: 西北工业大学, 2007. |
| CHEN D. UAV path planning based on particle swarm optimization[D]. Xi'an: Northwest Polytechnical University, 2007. | |
| 15 | 张延松. 基于遗传算法的无人机航迹规划研究[D]. 长沙: 中南大学, 2010. |
| ZHANG Y S. UAV path planning based on the genetic algorithm[D]. Changsha: Central South University, 2010. | |
| 16 | 胡中华. 基于智能优化算法的无人机航迹规划若干关键技术研究[D]. 南京: 南京航空航天大学, 2011. |
| HU Z H. Research on some key techniques of UAV path planning based on intelligent optimization algorithm[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2021. | |
| 17 |
陈侠, 毛海亮, 刘奎武. 基于改进自适应蚁群算法的无人机航迹规划研究[J]. 电光与控制, 2022, 29 (9): 6- 10.
doi: 10.3969/j.issn.1671-637X.2022.09.002 |
|
CHEN X , MAO H L , LIU K W . Path planning of UAV based on improved adaptive ant colony algorithm[J]. Electronics Optics & Control, 2022, 29 (9): 6- 10.
doi: 10.3969/j.issn.1671-637X.2022.09.002 |
|
| 18 | 郑弈, 谢亚琴. 基于Dijkstra算法改进的飞行器航迹快速规划算法[J]. 电子测量技术, 2022, 45 (12): 73- 79. |
| ZHENG Y , XIE Y Q . Improved fast aircraft path planning algorithm based on Dijkstra algorithm[J]. Electronic Measurement Technology, 2022, 45 (12): 73- 79. | |
| 19 | 李昱, 李红烨. 针对特殊威胁的改进人工势场法航迹规划[J]. 探测与控制学报, 2022, 44 (4): 111- 117. |
| LI Y , LI H Y . An improbed APF route planning method for special threats[J]. Journal of Dectection & Control, 2022, 44 (4): 111- 117. | |
| 20 |
韩尧, 李少华. 基于改进人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2021, 43 (11): 3305- 3311.
doi: 10.12305/j.issn.1001-506X.2021.11.31 |
|
HAN Y , LI S H . UAV path planning based on improved artificial potential field[J]. Systems Engineering and Electronics, 2021, 43 (11): 3305- 3311.
doi: 10.12305/j.issn.1001-506X.2021.11.31 |
|
| 21 | 蔡星娟, 胡钊鸣, 张志霞, 等. 基于高维多目标优化的多无人机协同航迹规划[J]. 中国科学: 信息科学, 2021, 51 (6): 985- 996. |
| CAI X J , HU Z M , ZHANG Z X , et al. Multi-UAV coordinated path planning based on many-objective optimization[J]. SCIENTIA SINICA Information, 2021, 51 (6): 985- 996. | |
| 22 | 余婧, 雍恩米, 陈汉洋, 等. 面向多无人机协同对地攻击的双层任务规划方法[J]. 系统工程与电子技术, 2022, 44 (9): 2849- 2857. |
| YU J , YONG E M , CHEN H Y , et al. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack[J]. Systems Engineering and Electronics, 2022, 44 (9): 2849- 2857. |
| [1] | Xiaochen ZHAO, Dongtao ZHAO, Hang YUAN, Huan WANG, Qun ZHANG. Micro-motion parameters extraction for UAV under LPRF condition [J]. Systems Engineering and Electronics, 2024, 46(5): 1503-1513. |
| [2] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [3] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [4] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [5] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [6] | Wenhao BI, Mengqi ZHANG, Fei GAO, Mi YANG, An ZHANG. Review on UAV swarm task allocation technology [J]. Systems Engineering and Electronics, 2024, 46(3): 922-934. |
| [7] | Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(3): 942-952. |
| [8] | Cheng GAO, Yanli DU, Yunong BU, Yanbin LIU, Yufei WANG. Heterogeneous UAV swarm grouping deployment for complex multiple tasks [J]. Systems Engineering and Electronics, 2024, 46(3): 972-981. |
| [9] | Liguan PEI, Wei ZHOU, Jingdong LIU. Research on arrangement method of motorized chaff screen based on cuckoo bird search algorithm [J]. Systems Engineering and Electronics, 2024, 46(3): 814-823. |
| [10] | Yong YANG, Xuesong WANG. Analysis of radar detection performance for UAV based on clutter tail distribution [J]. Systems Engineering and Electronics, 2024, 46(1): 113-120. |
| [11] | Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU. Destination prediction of UAV cluster trajectory based on EMD-DESN [J]. Systems Engineering and Electronics, 2024, 46(1): 290-299. |
| [12] | Zhongbao WANG, Kuiying YIN. Block effect suppression method of UAV-borne SAR image based on joint domain filtering [J]. Systems Engineering and Electronics, 2023, 45(9): 2768-2776. |
| [13] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [14] | Yufeng LIANG, Jingchao ZHAO, Wangkui LIU, Lei WANG, Shipeng WANG, Shilong RUAN. Air combat guidance method based on top rolling optimization and bottom tracking [J]. Systems Engineering and Electronics, 2023, 45(9): 2866-2872. |
| [15] | Huizhu HAN, Yangchao HUANG, Hang HU, Qi AN, Shihao LIU. Energy-spectrum efficiency trade-off optimization based on short packet transmission in UAV communication [J]. Systems Engineering and Electronics, 2023, 45(9): 2956-2964. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||