Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (3): 942-952.doi: 10.12305/j.issn.1001-506X.2024.03.20
• Systems Engineering • Previous Articles Next Articles
Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm
Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO
- College of Intelligence Science and Technology, National University of Defense Technology, Changsha 410073, China
-
Received:2022-04-28Online:2024-02-29Published:2024-03-08 -
Contact:Guanghan BAI
CLC Number:
Cite this article
Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm[J]. Systems Engineering and Electronics, 2024, 46(3): 942-952.
share this article
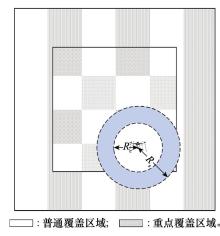
Fig.1
Schematic diagram of unmanned aerial vehicle coverage"
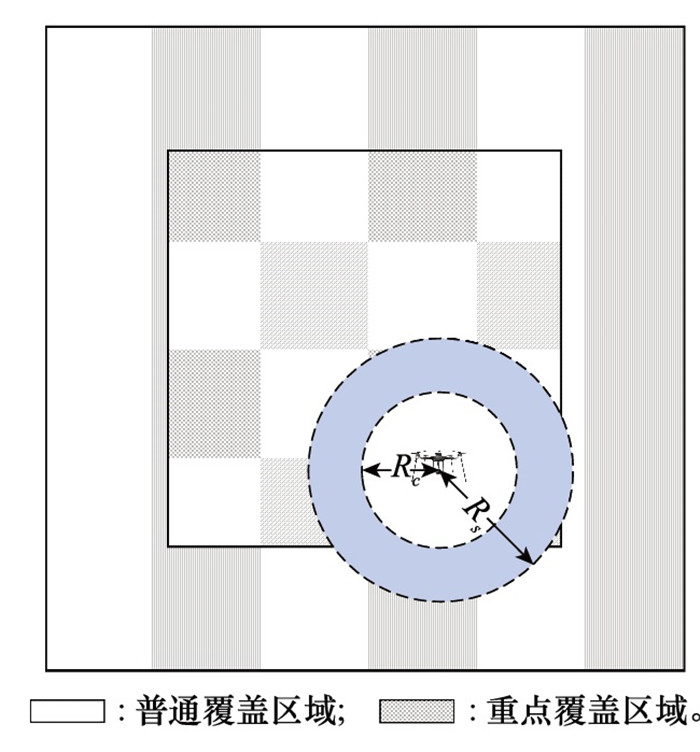
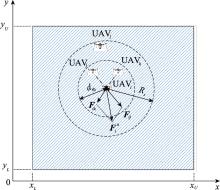
Fig.2
Repulsive force among unmanned aerial vehicles"
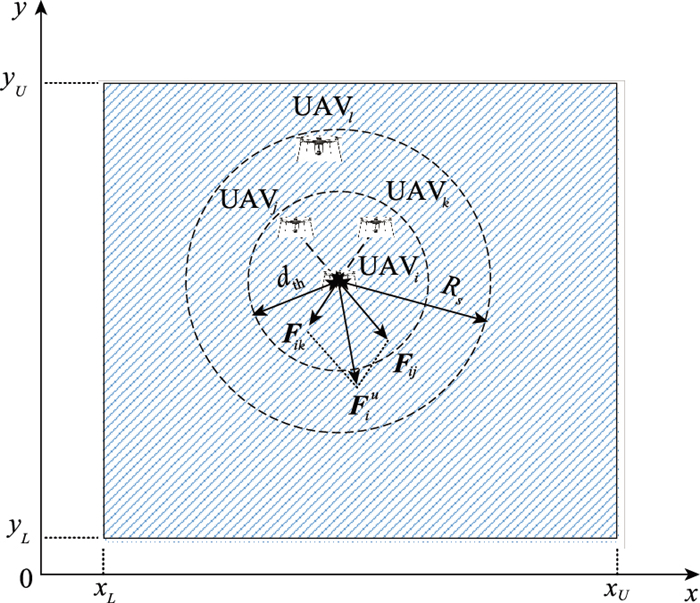
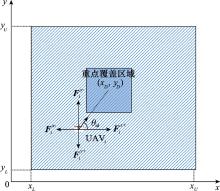
Fig.3
Analysis of external force on unmanned aerial vehicles"
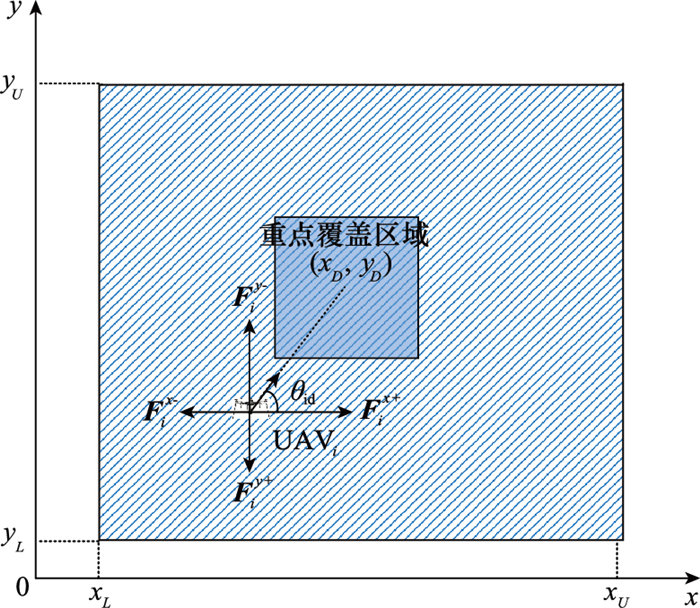
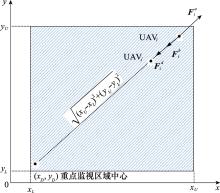
Fig.4
Extreme situation 1 of unmanned aerial vehicle location"
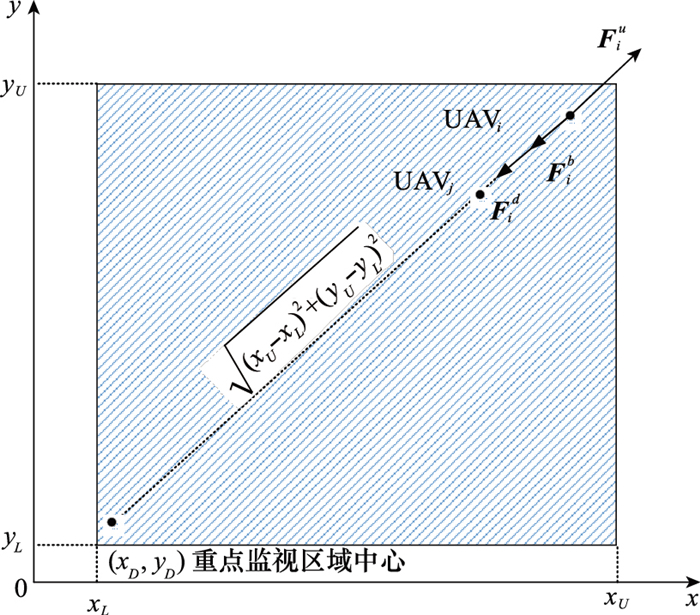
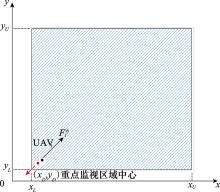
Fig.5
Extreme situation 2 of unmanned aerial vehicle location"
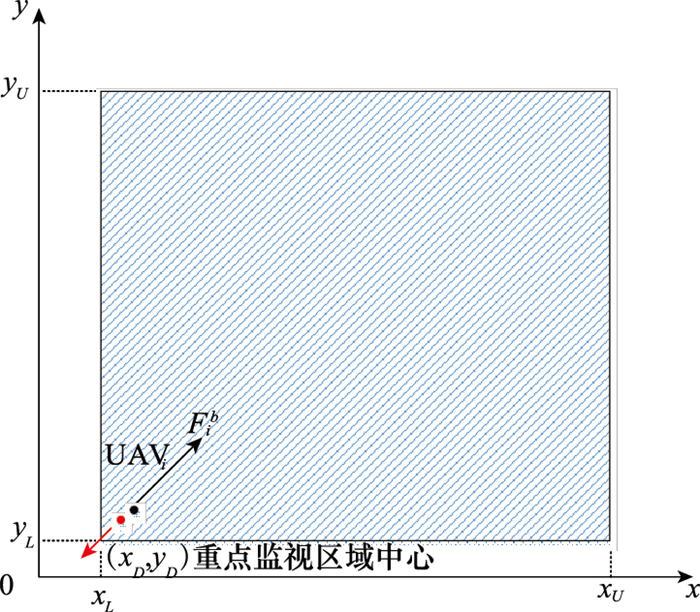
Table 1
Weight coefficient of each virtual force"
| 权重符号 | 取值 |
| ωu | |
| ωb | (Dc+0.5Dd)3 |
| ωd |
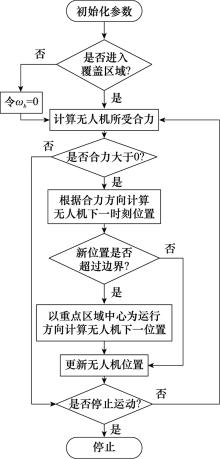
Fig.6
Flow chart of unmanned aerial vehicle self-organization algorithm"
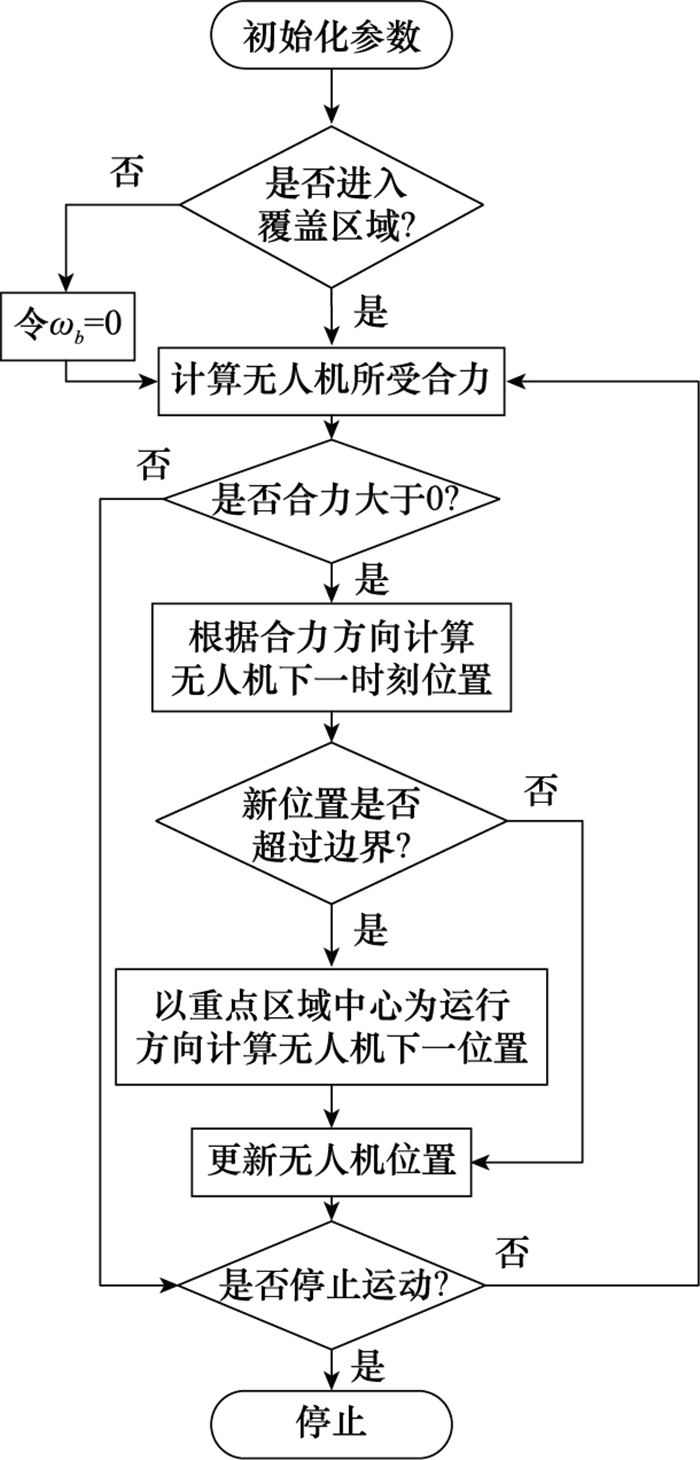
Fig.7
Self-organizing recovery process of swarm"
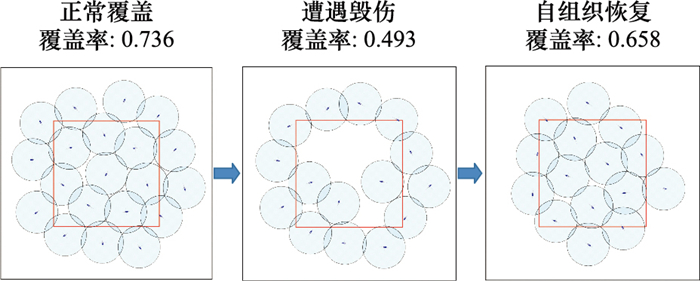

Fig.8
Coverage critical threshold adjustment process"
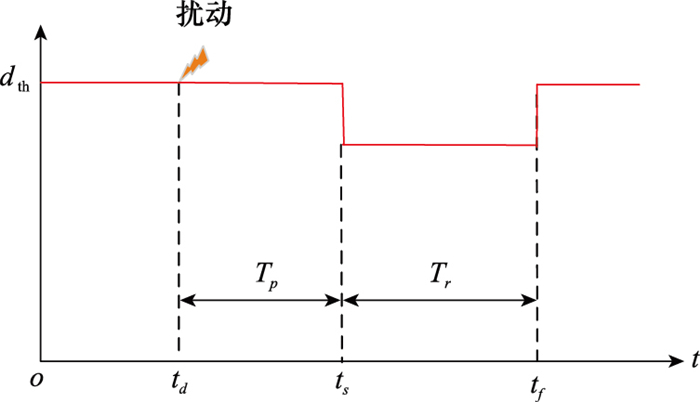
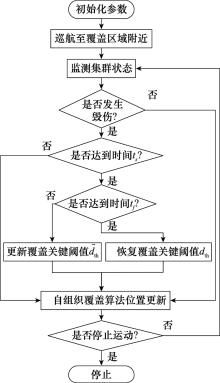
Fig.9
Flow chart of resilient self-organizing coverage algorithm"
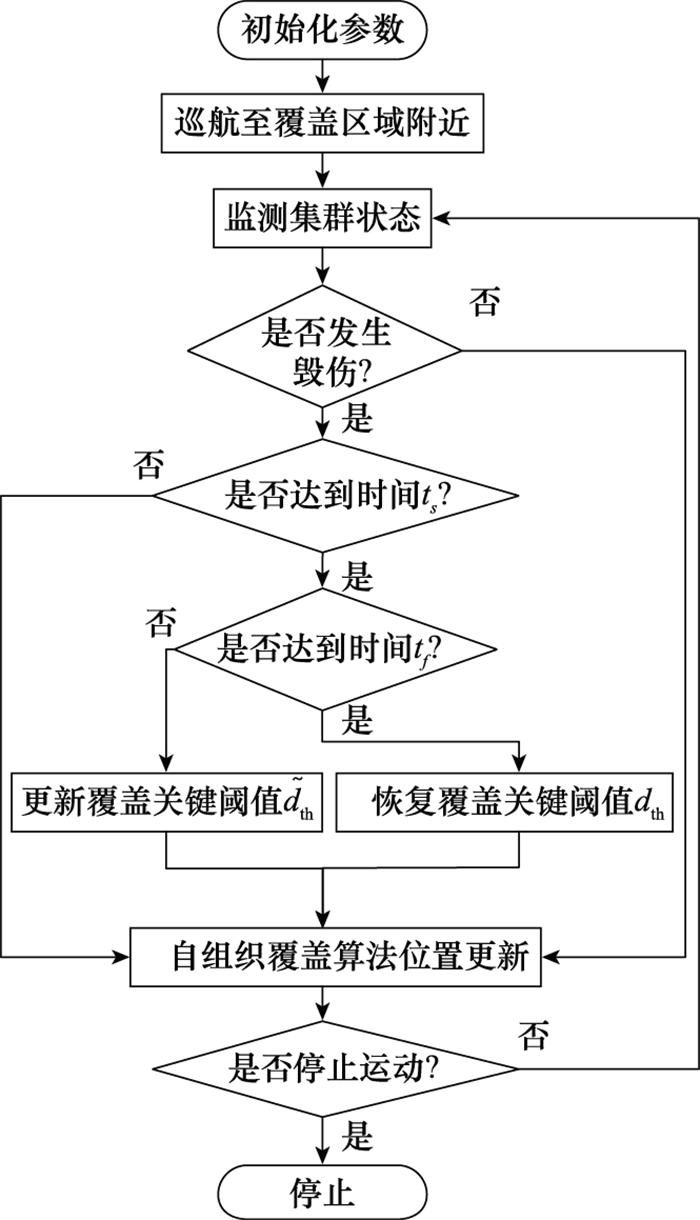

Fig.10
Coverage of unmanned aerial vehicle swarm in different key areas"
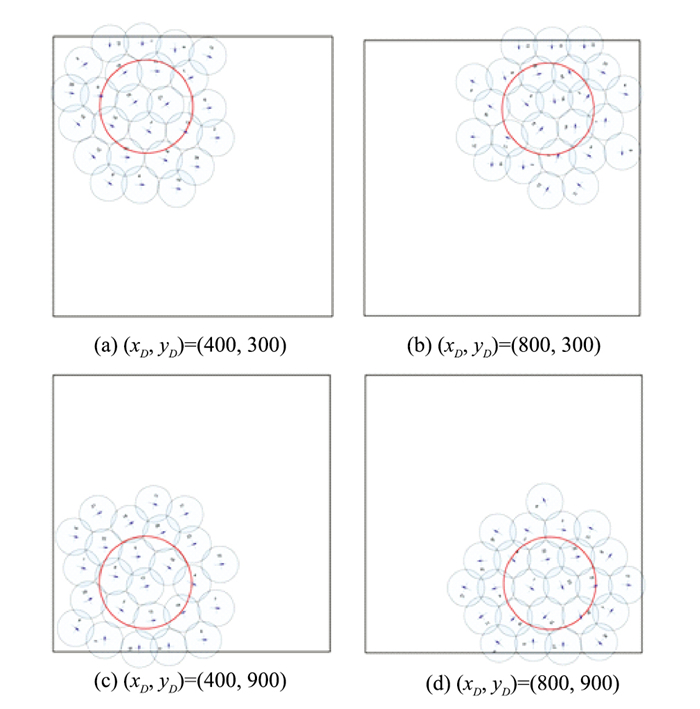

Fig.11
Swarm coverage with n=20"
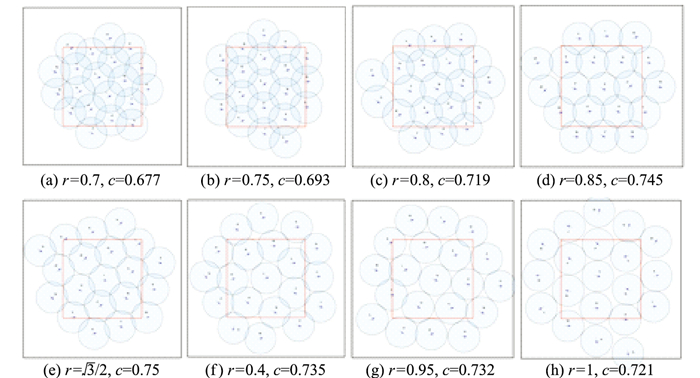

Fig.12
Swarm coverage with n=30"
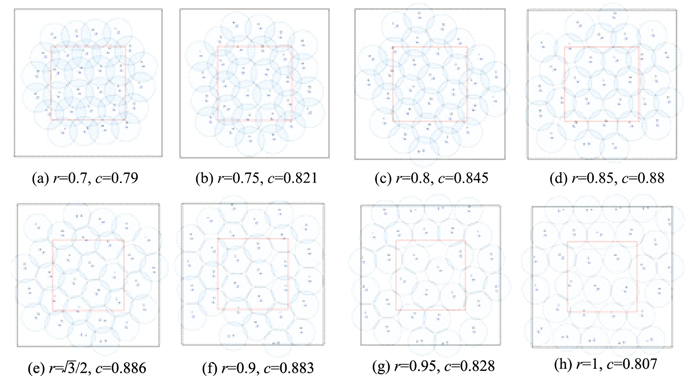

Fig.13
Swarm coverage with n=40"
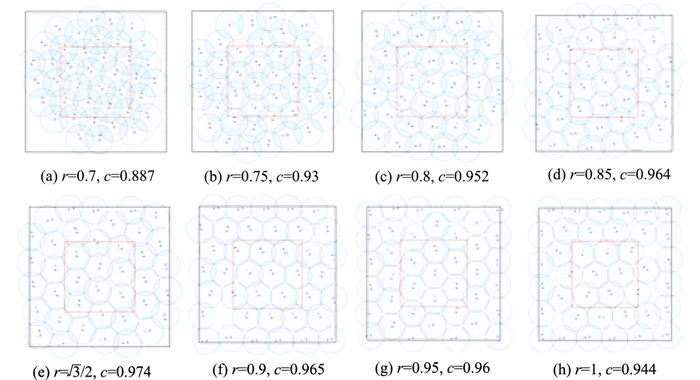

Fig.14
Swarm coverage with n=50"
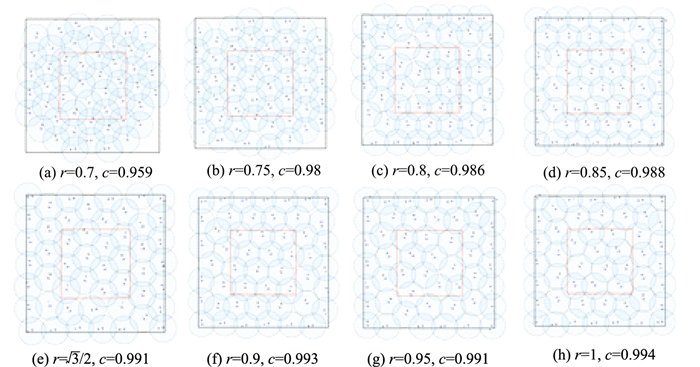
Fig.15
Number of unmanned aerial vehicles and different critical threshold coverage sizes"
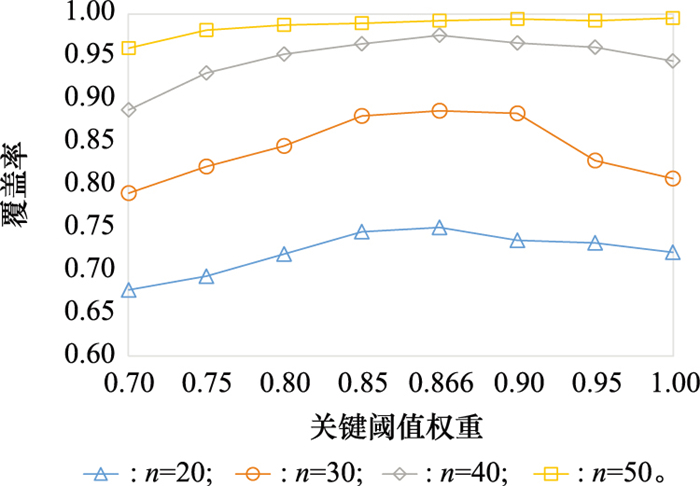
Table 2
Parameters in experiments"
| 集群数量 | 最优性能PQ(t) | 任务需求${\bar Q}$(t) | 毁伤规模 |
| 20 | 1 | 0.6 | 5 |
| 30 | 1 | 0.8 | 5 |
| 40 | 1 | 0.9 | 5 |
| 50 | 1 | 0.95 | 5 |
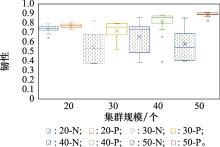
Fig.16
Resilience of two modes in different swarm scales"
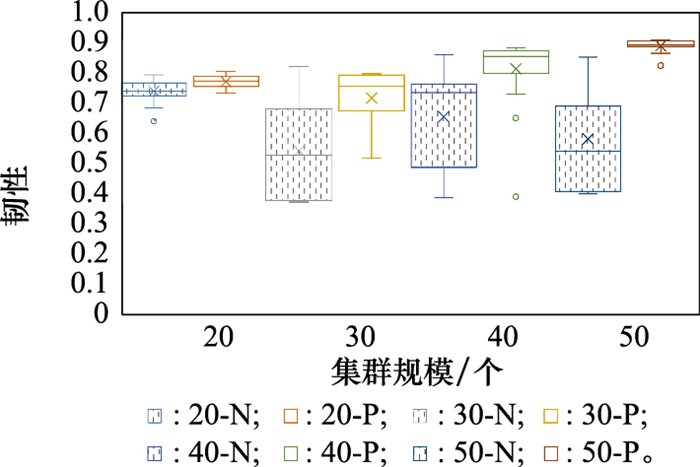
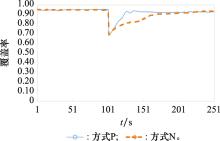
Fig.17
Variation process of single test coverage over time in two modes with n=40"
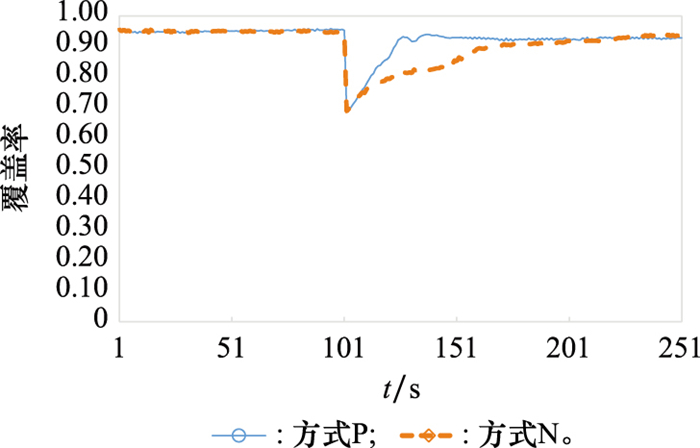
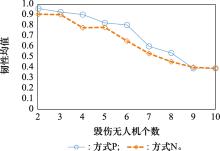
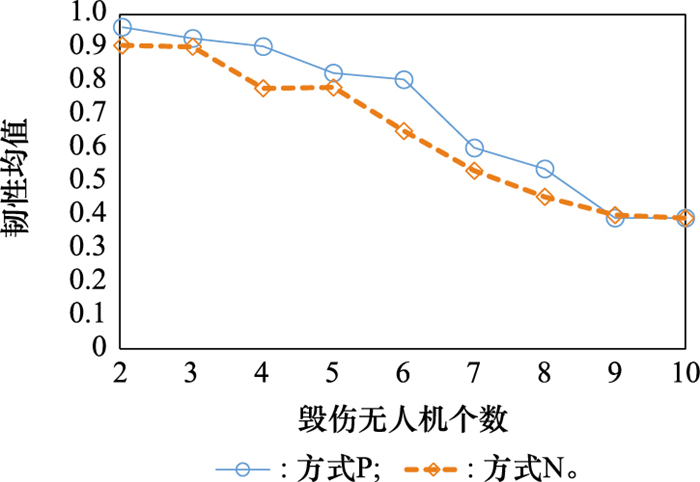
Fig.18
Resilience of unmanned aerial vehicles varies with degree of damage with n=40"
| 1 | MERWADAY A , TUNCER A , KUMBHAR A , et al. Improved throughput coverage in natural disasters: unmanned aerial base stations for public-safety communications[J]. IEEE Vehicular Technology Magazine, 2016, 11 (3): 53- 60. |
| 2 |
HYONDONG O , SEUNGKEUN K , JINYOUNG S , et al. Coordinated trajectory planning for efficient communication relay using multiple UAVs[J]. IFAC Proceedings Volumes, 2013, 46 (19): 119- 124.
doi: 10.3182/20130902-5-DE-2040.00060 |
| 3 |
TROTTA A , FELICE M , MONTORI F , et al. Joint coverage, connectivity, and charging strategies for distributed UAV networks[J]. IEEE Trans. on Robotics, 2018, 34 (4): 883- 900.
doi: 10.1109/TRO.2018.2839087 |
| 4 |
SCHWAGER M , VITUS M P , POWERS S , et al. Robust adaptive coverage control for robotic sensor networks[J]. IEEE Trans. on Control of Network Systems, 2017, 4 (3): 462- 476.
doi: 10.1109/TCNS.2015.2512326 |
| 5 |
YUE L , LIN C . UAV-assisted dynamic coverage in a heterogeneous cellular system[J]. IEEE Network, 2017, 31 (4): 56- 61.
doi: 10.1109/MNET.2017.1600280 |
| 6 | BERGER C, WZOREK M, KVARNSTROM J, et al. Area coverage with heterogeneous UAVs using scan patterns[C]//Proc. of the IEEE International Symposium on Safety, Security, and Rescue Robotics, 2016: 342-349. |
| 7 |
REINA D G , TAWFIK H , TORAL S L . Multi-subpopulation evolutionary algorithms for coverage deployment of UAV-networks[J]. Ad Hoc Networks, 2018, 68, 16- 32.
doi: 10.1016/j.adhoc.2017.09.005 |
| 8 | ZOU Y, CHAKRABARTY K. Sensor deployment and target localization based on virtual forces[C]//Proc. of the 22nd Annual Joint Conference of the IEEE Computer and Communications Societies, 2003. |
| 9 | 杨明华, 曹元大, 谭励, 等. 一种移动传感器网络精确部署算法[J]. 北京理工大学学报, 2009, 29 (1): 27- 31. |
| YANG M H , CAO Y D , TAN L , et al. A precision deployment algorithm in mobile sensor network[J]. Transactions of Beijing Institute of Technology, 2009, 29 (1): 27- 31. | |
| 10 |
LIN T Y , SANTOSO H A , WU K R . Global sensor deployment and local coverage-aware recovery schemes for smart environments[J]. IEEE Trans. on Mobile Computing, 2015, 14 (7): 1382- 1396.
doi: 10.1109/TMC.2014.2353613 |
| 11 |
ZHAO H T , MAO L , WEI J B . Coverage on demand: a simple motion control algorithm for autonomous robotic sensor networks[J]. Computer Networks, 2018, 135, 190- 200.
doi: 10.1016/j.comnet.2018.02.004 |
| 12 |
SEMNANI S H , BASIR O A . Semi-flocking algorithm for motion control of mobile sensors in large-scale surveillance systems[J]. IEEE Trans. on Cybern, 2015, 45 (1): 129- 137.
doi: 10.1109/TCYB.2014.2328659 |
| 13 | ZHAO T F , WANG H , MA Q W . The coverage method of unmanned aerial vehicle mounted base station sensor network based on relative distance[J]. International Journal of Distributed Sensor Networks, 2020, 16 (5): 1550147720920220. |
| 14 | 向庭立, 王红军, 杨刚, 等. 分布式无人机网络覆盖优化算法[J]. 空军工程大学学报(自然科学版), 2019, 20 (4): 59- 65. |
| XIANG T L , WANG H J , YANG G , et al. Research on distributed UAV network coverage optimization algorithm[J]. Journal of Air Force Engineering University (Natural Science Edition), 2019, 20 (4): 59- 65. | |
| 15 | HOLLING C S . Resilience and stability of ecological systems[J]. Annual Review of Ecology & Systematics, 1973, 4 (1): 1- 23. |
| 16 |
MARTIN R . Regional economic resilience, hysteresis and recessionary shocks[J]. Journal of Economic Geography, 2012, 12 (1): 1- 32.
doi: 10.1093/jeg/lbr019 |
| 17 | WINK R . Regional economic resilience: policy experiences and issues in europe[J]. Raumforschung Und Raumordnung, 2014, 72, 83- 84. |
| 18 |
ADGER W N . Social and ecological resilience: are they related?[J]. Progress in Human Geography, 2000, 24 (3): 347- 364.
doi: 10.1191/030913200701540465 |
| 19 |
KECK M , SAKDAPOLRAK P . What is social resilience? Lessons learned and ways forward[J]. Erdkunde, 2013, 67 (1): 5- 19.
doi: 10.3112/erdkunde.2013.01.02 |
| 20 | ZHANG L M , ZENG G W , LI D Q , et al. Scale-free resilience of real traffic jams[J]. Proceedings of the National Academy of Sciences of the United States of America, 2019, 116 (18): 8673- 8678. |
| 21 | 蓝羽石, 周光霞, 王珩, 等. 韧性指挥信息系统构建机理及实现研究[J]. 指挥与控制学报, 2015, 1 (3): 284- 291. |
| LAN Y S , ZHOU G X , WAMG Y , et al. Construction mechanism and implementation of resilient command information systems[J]. Journal of Command and Control, 2015, 1 (3): 284- 291. | |
| 22 | 费爱国. 韧性指挥与控制系统设计相关问题探析[J]. 指挥信息系统与技术, 2017, 8 (2): 1- 4. |
| FEI A G . Analysis on related issues about resilient command and control system design[J]. Command Information System and Technology, 2017, 8 (2): 1- 4. | |
| 23 |
LIU T , BAI G H , TAO J Y , et al. Modeling and evaluation method for resilience analysis of multi-state networks[J]. Reliability Engineering and System Safety, 2022, 226, 108663.
doi: 10.1016/j.ress.2022.108663 |
| 24 |
HOSSEINI S , BARKER K , RAMIREZ-MARQUEZ J E . A review of definitions and measures of system resilience[J]. Reliability Engineering and System Safety, 2016, 145, 47- 61.
doi: 10.1016/j.ress.2015.08.006 |
| 25 | 刘涛, 白光晗, 陶俊勇, 等. 面向任务的复杂系统韧性评估方法[J]. 系统工程与电子技术, 2021, 43 (4): 1003- 1011. |
| LIU T , BAI G H , TAO J Y , et al. Mission-oriented resi-lience evaluation for complex system[J]. Systems Engineering and Electronics, 2021, 43 (4): 1003- 1011. | |
| 26 | 肖智文, 王国庆, 朱建明, 等. 面向突发事件的电网韧性能力评价及构建方法[J]. 系统工程理论与实践, 2019, 39 (10): 2637- 2645. |
| XIAO Z W , WANG G Q , ZHU J M , et al. Method for assessing and constructing power system resilience under emergency events[J]. System Engineering Theory and Practice, 2019, 39 (10): 2637- 2645. | |
| 27 |
BAI G H , LI Y J , FANG Y N , et al. Network approach for resilience evaluation of a UAV swarm by considering communication limits[J]. Reliability Engineering and System Safety, 2020, 193, 106602.
doi: 10.1016/j.ress.2019.106602 |
| 28 | CHENG C C , BAI G H , ZHANG Y A , et al. Resilience evaluation for UAV swarm performing joint reconnaissance mission[J]. Chaos, 2019, 29 (5): 053132. |
| 29 | 潘星, 张国忠, 张跃东, 等. 工程弹性系统与系统弹性理论研究综述[J]. 系统工程与电子技术, 2019, 41 (9): 2006- 2015. |
| PAN X , ZHANG G Z , ZHANG Y D , et al. Review of engineered resilient systems and system resilience theory[J]. Systems Engineering and Electronics, 2019, 41 (9): 2006- 2015. | |
| 30 | 李瑞莹, 杜时佳, 康锐. 复杂系统弹性建模与评估[M]. 北京: 化学工业出版社, 2019. |
| LI R Y , DU S J , KANG R . Elastic modeling and evaluation of complex systems[M]. Beijing: Chemical Industry Press, 2019. | |
| 31 | BRUNEAU M , CHANG S E , EGUCHI R T , et al. A framework to quantitatively assess and enhance the seismic resilience of communities[J]. Earthquake Spectra, 2012, 19 (4): 733- 752. |
| 32 | MORAES R S , FREITAS E P . Distributed control for groups of unmanned aerial vehicles performing surveillance missions and providing relay communication network services[J]. Journal of Intelligent and Robotic Systems, 2018, 92, 645- 656. |
| [1] | Wenhao BI, Mengqi ZHANG, Fei GAO, Mi YANG, An ZHANG. Review on UAV swarm task allocation technology [J]. Systems Engineering and Electronics, 2024, 46(3): 922-934. |
| [2] | Cheng GAO, Yanli DU, Yunong BU, Yanbin LIU, Yufei WANG. Heterogeneous UAV swarm grouping deployment for complex multiple tasks [J]. Systems Engineering and Electronics, 2024, 46(3): 972-981. |
| [3] | Xiaogang QI, Yutong ZHOU, Lifang LIU. Evaluation of the reliability of UAV swarm for ground combat missions [J]. Systems Engineering and Electronics, 2023, 45(9): 2971-2978. |
| [4] | Zhiwei CHEN, Jian JIAO, Tingdi ZHAO, Jiayun CHU. Review on resilience technology of weapon system-of-systems [J]. Systems Engineering and Electronics, 2023, 45(7): 2069-2077. |
| [5] | Shuheng ZHANG, Ruping ZHAI, Yongkai LIU. Identification of UAV swarm type based on fusion features of communication and radar domain [J]. Systems Engineering and Electronics, 2023, 45(12): 3734-3742. |
| [6] | Ruping ZHAI, Shuheng ZHANG, Jiarong PING. Waveform recognition of unmanned aerial vehicle swarm communication in complex multipath environment [J]. Systems Engineering and Electronics, 2023, 45(10): 3312-3320. |
| [7] | Renjie XU, Lin GONG, Jian XIE, Xin LIU, Kewei YANG. Operation network link importance evaluation and recovery strategy based on equipment system-of-systems resilience [J]. Systems Engineering and Electronics, 2023, 45(1): 139-147. |
| [8] | Dongdong ZHANG, Xiaochuan AI, Chang LIU. Research on equipment performance degradation based on feature extraction of similar samples [J]. Systems Engineering and Electronics, 2022, 44(7): 2374-2380. |
| [9] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [10] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [11] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [12] | Zhiwei CHEN, Jing WANG, Changchao GU, Jianchun ZHANG, Jilong ZHONG. Performance availability and resilience analysis of weapon system of systems considering dynamic reconfiguration [J]. Systems Engineering and Electronics, 2021, 43(8): 2347-2354. |
| [13] | Tao LIU, Guanghan BAI, Junyong TAO, Yunan ZHANG, Yining FANG. Mission-oriented resilience evaluation method for complex system [J]. Systems Engineering and Electronics, 2021, 43(4): 1003-1011. |
| [14] | Lingfeng GU, Ming HE, Guoyou CHEN, Minhui JI, Jintao LIU. Research on unmanned aerial vehicle swarm system resilience [J]. Systems Engineering and Electronics, 2021, 43(1): 156-162. |
| [15] | Yang ZHANG, Guangya SI, Yanzheng WANG. Simulation of unmanned aerial vehicle swarm electromagnetic operation concept [J]. Systems Engineering and Electronics, 2020, 42(7): 1510-1518. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||