Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (5): 1756-1766.doi: 10.12305/j.issn.1001-506X.2024.05.28
• Guidance, Navigation and Control • Previous Articles
Three-dimensional path planning of UAV based on EMSDBO algorithm
Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU
- College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
-
Received:2023-05-15Online:2024-04-30Published:2024-04-30 -
Contact:Zhenyu YANG
CLC Number:
Cite this article
Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm[J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766.
share this article

Fig.1
Schematic diagram of path planning"


Fig.2
Threat cost calculation model"

Table 1
Flight attitude judgment"
| 飞行模式 | 判断条件 | 速度 |
| 水平飞行 | ϕt≤ϕ0且ψt≤ψ0 | v1 |
| 偏转转弯 | ϕt>ϕ0且ψt≤ψ0 | v2 |
| 爬升下降 | ϕt≤ϕ0且ψt>ψ0 | v3 |
Table 2
Basic test functions"
| 函数类别 | 公式表达式 | 维度 | 搜索范围 | 最优值 |
| 单峰函数 | 30 | [-100, 100] | 0 | |
| 30 | [-100, 100] | 0 | ||
| 30 | [-100, 100] | 0 | ||
| 30 | [-1.28, 1.28] | 0 | ||
| 多峰函数 | 30 | [-5.12, 5.12] | 0 | |
| 30 | [-600, 600] | 0 |
Table 3
Comparison of the performance for different algorithms"
| 测试函数 | 统计值 | EMSDBO | DBO | GWO | WOA | NGO |
| f1 | 最优值 | 0.00 E+00 | 1.12 E-142 | 5.76 E-30 | 2.75 E-82 | 1.43 E-89 |
| 平均值 | 0.00 E+00 | 2.83 E-106 | 1.14 E-27 | 6.91 E-73 | 4.37 E-87 | |
| 标准差 | 0.00 E+00 | 1.92 E-105 | 2.22 E-27 | 2.72 E-72 | 1.86 E-86 | |
| f2 | 最优值 | 0.00 E+00 | 2.02 E-96 | 9.17 E-09 | 7.56 E+04 | 4.98 E-28 |
| 平均值 | 0.00 E+00 | 2.56 E-40 | 5.87 E-06 | 1.49 E+04 | 1.84 E-22 | |
| 标准差 | 0.00 E+00 | 1.29 E-39 | 1.40 E-05 | 4.79 E+04 | 8.18 E-22 | |
| f3 | 最优值 | 6.67 E-12 | 4.80 E-06 | 2.49 E-01 | 9.34 E-02 | 7.17 E-07 |
| 平均值 | 1.17 E-10 | 4.86 E-03 | 7.76 E-01 | 3.85 E-01 | 7.73 E-04 | |
| 标准差 | 1.30 E-10 | 2.38 E-02 | 3.50 E-01 | 2.41 E-01 | 3.40 E-03 | |
| f4 | 最优值 | 3.45 E-06 | 9.52 E-05 | 3.38 E-04 | 5.58 E-07 | 1.86 E-04 |
| 平均值 | 7.22 E-05 | 1.39 E-03 | 2.00 E-03 | 2.97 E-03 | 6.29 E-04 | |
| 标准差 | 5.66 E-05 | 1.04 E-03 | 1.09 E-03 | 2.94 E-03 | 3.16 E-04 | |
| f5 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 0.00 E+00 | 7.96 E-01 | 2.87 E+00 | 1.14 E-15 | 0.00 E+00 | |
| 标准差 | 0.00 E+00 | 4.01 E+00 | 3.71 E+00 | 8.04 E-15 | 0.00 E+00 | |
| f6 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 0.00 E+00 | 4.26 E-04 | 5.03 E-03 | 1.76 E-02 | 0.00 E+00 | |
| 标准差 | 0.00 E+00 | 3.01 E-03 | 1.04 E-02 | 6.83 E-03 | 0.00 E+00 |

Fig.3
Function convergence curve"

Table 4
Performance comparison of different improvement strategies"
| 函数 | 统计值 | DBO | ODBO | SDBO | QDBO | VDBO | EMSDBO |
| f1 | 最优值 | 1.12 E-142 | 2.24 E-148 | 5.82 E-155 | 0.00 E+00 | 2.11 E-213 | 0.00 E+00 |
| 平均值 | 2.83 E-106 | 3.84 E-121 | 1.94 E-114 | 0.00 E+00 | 4.93 E-107 | 0.00 E+00 | |
| 标准差 | 1.92 E-105 | 1.22 E-110 | 1.06 E-113 | 0.00 E+00 | 3.49 E-106 | 0.00 E+00 | |
| f2 | 最优值 | 2.02 E-96 | 1.20 E-72 | 2.21 E-75 | 0.00 E+00 | 1.90 E-101 | 0.00 E+00 |
| 平均值 | 2.56 E-40 | 1.56 E-42 | 5.84 E-54 | 0.00 E+00 | 5.91 E-38 | 0.00 E+00 | |
| 标准差 | 1.29 E-39 | 8.93 E-39 | 3.81 E-53 | 0.00 E+00 | 3.95 E-40 | 0.00 E+00 | |
| f3 | 最优值 | 4.80 E-06 | 2.82 E-07 | 4.22 E-06 | 5.76 E-07 | 8.94 E-10 | 6.67 E-12 |
| 平均值 | 4.86 E-03 | 1.51 E-06 | 6.46 E-04 | 3.56 E-03 | 8.54 E-08 | 1.17 E-10 | |
| 标准差 | 2.38 E-02 | 8.10 E-07 | 5.45 E-04 | 1.97 E-02 | 2.13 E-07 | 1.30 E-10 | |
| f4 | 最优值 | 9.52 E-05 | 2.28 E-05 | 2.10 E-06 | 1.57 E-04 | 3.54 E-05 | 3.45 E-06 |
| 平均值 | 1.39 E-03 | 1.14 E-03 | 1.14 E-04 | 1.04 E-03 | 7.96 E-04 | 7.22 E-05 | |
| 标准差 | 1.04 E-03 | 8.27 E-04 | 9.01 E-05 | 8.05 E-04 | 7.11 E-04 | 5.66 E-05 | |
| f5 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 7.96 E-01 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | |
| 标准差 | 4.01 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | |
| f6 | 最优值 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
| 平均值 | 4.26 E-04 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | |
| 标准差 | 3.01 E-03 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 | 0.00 E+00 |
Table 5
Simulation experiment parameter settings"
| 参数名称 | 设置值 | 参数名称 | 设置值 | |
| m | 15 | tmin/s | 3 | |
| ϕmax/(°) | 45 | v1/(m/s) | 15 | |
| ψmax/(°) | 45 | v2/(m/s) | 10 | |
| lmin/m | 30 | v3/(m/s) | 6 | |
| α1 | 0.6 | tmin/s | 2 | |
| α2 | 0.4 | T | 10 | |
| ϕ0/(°) | 30 | w1 | 0.4 | |
| ψ0/(°) | 30 | w2 | 0.2 | |
| hmax/m | 400 | w3 | 0.2 | |
| hmin/m | 100 | w4 | 0.2 |

Fig.4
Different threat scenario flight paths"

Table 6
Average results for different threat scenarios"
| 实验场景 | 最小响应时间/s | 平均航程距离/m | 威胁成本 |
| 本文场景 | 5.44 | 1 018.5 | 45.9 |
| 场景1 | 5.68 | 978.02 | 61.0 |
| 场景2 | 11.48 | 1 068.2 | 28.7 |

Fig.5
Flight three-dimensional path graph"
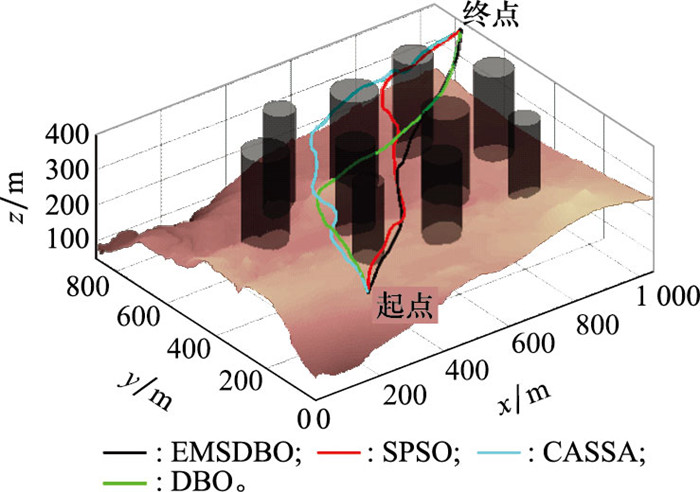

Fig.6
Top view of flight path"


Fig.7
Convergence curves of four algorithm"

Table 7
Comparison of the average results of the four algorithms"
| 算法名称 | F1 | F2 | F3 | F4 | F | 寻路成功率/% | ||
| Fbest | Fmean | Fstd | ||||||
| EMSDBO | 1 125.8 | 142.1 | 114.7 | 60.0 | 476.6 | 517.9 | 18.8 | 100 |
| SPSO | 1 278.5 | 227.1 | 158.7 | 70.3 | 506.8 | 602.6 | 64.9 | 86 |
| CASSA | 1 276.7 | 251.1 | 159.3 | 83.5 | 515.9 | 609.4 | 40.4 | 100 |
| DBO | 1 263.9 | 224.0 | 180.5 | 37.4 | 553.0 | 593.9 | 26.2 | 80 |

Fig.8
Total cost function boxplot"

| 20 |
XUE J K , SHEN B . Dung beetle optimizer: a new meta-heuristic algorithm for global optimization[J]. The Journal of Supercomputing, 2023, 79, 7305- 7336.
doi: 10.1007/s11227-022-04959-6 |
| 21 | GUO J J , YUAN W C , DANG X Z , et al. Cable force optimization of a curved cable-stayed bridge with combined simulated annealing method and cubic B-Spline interpolation curves[J]. Engineering Structures, 2019, 201 (1): 109813. |
| 22 | 张洪海, 邹依原, 张启钱, 等. 未来城市空中交通管理研究综述[J]. 航空学报, 2021, 42 (7): 82- 106. |
| ZHANG H H , ZOU Y Y , ZHANG Q Q , et al. Future urban air mobility management: review[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (7): 82- 106. | |
| 23 |
张军峰, 蒋海行, 武晓光, 等. 基于BADA及航空器意图的四维航迹预测[J]. 西南交通大学学报, 2014, 49 (3): 553- 558.
doi: 10.3969/j.issn.0258-2724.2014.03.028 |
|
ZHANG J F , JIANG H X , WU X G , et al. 4D trajectory prediction based on BADA and aircraft intent[J]. Journal of Southwest Jiaotong University, 2014, 49 (3): 553- 558.
doi: 10.3969/j.issn.0258-2724.2014.03.028 |
|
| 24 |
JIANG H , DENG J H , CHEN Q S . Olfactory sensor combined with chemometrics analysis to determine fatty acid in stored wheat[J]. Food Control, 2023, 153, 109942- 109961.
doi: 10.1016/j.foodcont.2023.109942 |
| 25 |
WU C L , FU J C , HUANG X R , et al. Lithium-ion battery health state prediction based on VMD and DBO-SVR[J]. Energies, 2023, 16 (10): 3993- 4012.
doi: 10.3390/en16103993 |
| 26 | ZHU F , LI G S , TANG H , et al. Dung beetle optimization algorithm based on quantum computing and multi-strategy fusion for solving engineering problems[J]. Expert Systems with Applications, 2024, 236 (1): 121219- 121237. |
| 27 |
HAUSCHILD M , PELIKAN M . An introduction and survey of estimation of distribution algorithms[J]. Swarm and evolutionary computation, 2011, 1 (3): 111- 128.
doi: 10.1016/j.swevo.2011.08.003 |
| 28 | MIRJALILI S , LEWIS A . The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95 (1): 51- 67. |
| 1 | CHAO D , WU Q H . Survey of layered architecture in largescale FANETs[J]. Computer Science, 2020, 47 (9): 226- 231. |
| 2 | 赵畅, 刘允刚, 陈琳, 等. 面向元启发式算法的多无人机路径规划现状与展望[J]. 控制与决策, 2022, 37 (5): 1102- 1115. |
| ZHAO C , LIU Y G , CHEN L , et al. Research and development trend of multi-UAV path planning based on metaheuristic algorithm[J]. Control and Decision, 2022, 37 (5): 1102- 1115. | |
| 3 |
杨旭, 王锐, 张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
YANG X , WANG R , ZHANG T . Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J]. Control Theory & Applications, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
| 4 |
ZENG Y , ZHANG R . Energy-efficient UAV communication with trajectory optimization[J]. IEEE Trans.on Wireless Communications, 2017, 16 (6): 3747- 3760.
doi: 10.1109/TWC.2017.2688328 |
| 5 | AGGARWAL S , KUMAR N . Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges[J]. Computer Communications, 2020, 149 (1): 270- 299. |
| 6 | WANG H B , YIN P H , ZHENG W , et al. Mobile robot path planning based on improved A* algorithm and dynamic window method[J]. Robot, 2020, 42 (3): 92- 99. |
| 7 |
LI W M , WANG L , ZOU A W , et al. Path planning for UAV based on improved PRM[J]. Energies, 2022, 15 (19): 7267- 7283.
doi: 10.3390/en15197267 |
| 8 | MIN Y , LUO J J , WANG M M , et al. Coordinated path planning by integrating improved RRT* and quartic spline[J]. Chinse Journal of Mechanics, 2020, 52 (4): 1024- 1034. |
| 9 |
QI B K , LI M Q , YANG Y , et al. Research on UAV path planning obstacle avoidance algorithm based on improved artificial potential field method[J]. Journal of Physics: Conference Series, 2021, 1948 (1): 012060.
doi: 10.1088/1742-6596/1948/1/012060 |
| 10 | JIANG C K , LI Z , PAN S B , et al. Collision-free path planning of AGVs based on improved dijkstra algorithm[J]. Computer Science, 2020, 47 (8): 272- 277. |
| 11 |
WANG Y H , WANG S M . UAV path planning based on improved particle swarm optimization[J]. Computer Engineering & Science, 2020, 42 (9): 1690- 1696.
doi: 10.3969/j.issn.1007-130X.2020.09.020 |
| 12 | CAO Y , WEI W Y , BAI Y , et al. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm[J]. Cluster Computing, 2019, 22 (1): 5175- 5184. |
| 13 |
ZHANG X M , HU Y J , LI W G , et al. Mission planning of multi base UAV based on improved artificial bee colony algorithm[J]. Journal of Physics: Conference Series, 2020, 1550 (3): 32072- 32096.
doi: 10.1088/1742-6596/1550/3/032072 |
| 14 |
JARRAY R , AL-DHAIFALLAH M , REZK H , et al. Parallel cooperative coevolutionary grey wolf optimizer for path planning problem of unmanned aerial vehicles[J]. Sensors, 2022, 22 (5): 1826- 1848.
doi: 10.3390/s22051826 |
| 15 |
刘志强, 何丽, 袁亮, 等. 采用改进灰狼算法的移动机器人路径规划[J]. 西安交通大学学报, 2022, 56 (10): 49- 60.
doi: 10.7652/xjtuxb202210005 |
|
LIU Z Q , HE L , YUAN L , et al. Path planning of mobile robot based on TGWO algorithm[J]. Journal of Xi'an Jiaotong University, 2022, 56 (10): 49- 60.
doi: 10.7652/xjtuxb202210005 |
|
| 16 | LIN N , TANG J C , LI X W , et al. A novel improved bat algorithm in UAV path planning[J]. Computers, Materials & Continua, 2019, 61 (1): 323- 344. |
| 17 | YU W W , LIU J , ZHOU J . A novel sparrow particle swarm algorithm (SPSA) for unmanned aerial vehicle path planning[J]. Scientific Programming, 2021, 2021 (1): 5158304. |
| 18 | PHUNG M D , HA Q P . Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing, 2021, 107 (1): 107376- 107395. |
| 19 | ZHAI L Z , FENG S H . A novel evacuation path planning method based on improved genetic algorithm[J]. Journal of Intelligent & Fuzzy Systems, 2022, 42 (3): 1813- 1823. |
| 29 |
WANG H , WU Z J , RAHNAMAYAN S , et al. Enhancing particle swarm optimization using generalized opposition-based learning[J]. Information Sciences, 2011, 181 (20): 4699- 4714.
doi: 10.1016/j.ins.2011.03.016 |
| 30 | ZHANG X M , WANG D D , FU Z H , et al. Novel biogeography-based optimization algorithm with hybrid migration and global-best Gaussian mutation[J]. Applied Mathematical Modelling, 2020, 86 (1): 74- 91. |
| 31 | MIRJALILI S , MIRJALILI S M , LEWIS A . Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69 (1): 46- 61. |
| 32 | DEHGHANI M , HUBALOVSKY S , TROJOVSKY P . Northern goshawk optimization: a new swarm-based algorithm for solving optimization problems[J]. IEEE Access, 2021, 9 (1): 162059- 162080. |
| 33 |
LIU G Y , SHU C , LIANG Z W , et al. A modified sparrow search algorithm with application in 3D route planning for UAV[J]. Sensors, 2021, 21 (4): 1224- 1245.
doi: 10.3390/s21041224 |
| [1] | Xiaochen ZHAO, Dongtao ZHAO, Hang YUAN, Huan WANG, Qun ZHANG. Micro-motion parameters extraction for UAV under LPRF condition [J]. Systems Engineering and Electronics, 2024, 46(5): 1503-1513. |
| [2] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [3] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [4] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [5] | Wenhao BI, Mengqi ZHANG, Fei GAO, Mi YANG, An ZHANG. Review on UAV swarm task allocation technology [J]. Systems Engineering and Electronics, 2024, 46(3): 922-934. |
| [6] | Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(3): 942-952. |
| [7] | Cheng GAO, Yanli DU, Yunong BU, Yanbin LIU, Yufei WANG. Heterogeneous UAV swarm grouping deployment for complex multiple tasks [J]. Systems Engineering and Electronics, 2024, 46(3): 972-981. |
| [8] | Liguan PEI, Wei ZHOU, Jingdong LIU. Research on arrangement method of motorized chaff screen based on cuckoo bird search algorithm [J]. Systems Engineering and Electronics, 2024, 46(3): 814-823. |
| [9] | Yong YANG, Xuesong WANG. Analysis of radar detection performance for UAV based on clutter tail distribution [J]. Systems Engineering and Electronics, 2024, 46(1): 113-120. |
| [10] | Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU. Destination prediction of UAV cluster trajectory based on EMD-DESN [J]. Systems Engineering and Electronics, 2024, 46(1): 290-299. |
| [11] | Zhongbao WANG, Kuiying YIN. Block effect suppression method of UAV-borne SAR image based on joint domain filtering [J]. Systems Engineering and Electronics, 2023, 45(9): 2768-2776. |
| [12] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [13] | Yufeng LIANG, Jingchao ZHAO, Wangkui LIU, Lei WANG, Shipeng WANG, Shilong RUAN. Air combat guidance method based on top rolling optimization and bottom tracking [J]. Systems Engineering and Electronics, 2023, 45(9): 2866-2872. |
| [14] | Huizhu HAN, Yangchao HUANG, Hang HU, Qi AN, Shihao LIU. Energy-spectrum efficiency trade-off optimization based on short packet transmission in UAV communication [J]. Systems Engineering and Electronics, 2023, 45(9): 2956-2964. |
| [15] | Xiaogang QI, Yutong ZHOU, Lifang LIU. Evaluation of the reliability of UAV swarm for ground combat missions [J]. Systems Engineering and Electronics, 2023, 45(9): 2971-2978. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||