Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (5): 1745-1755.doi: 10.12305/j.issn.1001-506X.2024.05.27
• Guidance, Navigation and Control • Previous Articles
Path planning of carrier aircraft traction system based on CL-RRT and MPC
Jiawei SUN1, Minghui YU1,*, Dapeng YANG2, Haoquan TANG2, Dapeng BIAN3
- 1. School of Artificial Intelligence and Automation, Huazhong University of Science and Technology, Wuhan 430074, China
2. China Ship Development and Design Center, Wuhan 430064, China
3. The Second Military Representative Office of Naval Equipment Department in Wuhan, Wuhan 430064, China
-
Received:2022-10-24Online:2024-04-30Published:2024-04-30 -
Contact:Minghui YU
CLC Number:
Cite this article
Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC[J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755.
share this article

Fig.1
Carrier-based aircraft profile feature map"


Fig.2
Motion model diagram of carrier aircraft traction system"


Fig.3
Path planning flow chart"


Fig.4
Schematic diagram of pure pursuit control in forward motion"


Fig.5
Schematic diagram of carrier aircraft traction system with equilibrium configuration"


Fig.6
Schematic diagram of pure pursuit control in backward motion"

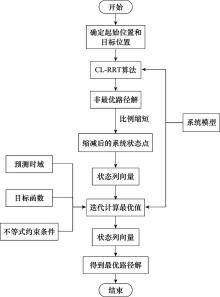
Fig.7
Associative algorithm step"


Fig.8
Path planning diagram of three algorithms in Scenario 1"


Fig.9
Compared diagram of path sweep area in Scenario 1"


Fig.10
Change curve of tractor input steering angle in Scenario 1"

Table 1
Comparison of experimental results in Scenario 1"
| 算法名称 | 路线长度/m | 扫掠面积/m2 | 最大输入角/(°) | 输入角极差/(°) | 输入角震荡次数 |
| RRT* | 148.63 | 1 842.45 | - | - | - |
| CL-RRT | 160.01 | 1 244.00 | 45 | 90 | 5 |
| CLRRT+MPC | 143.75 | 1 005.62 | 10.28 | 15.83 | 0 |
| 对比结果 | 减少10.2% | 减少19.2% | 减少77.2% | 减少82.4% | 更平稳 |

Fig.11
Path planning diagram of three algorithms in Scenario 2"

Table 2
Comparison of experimental results in Scenario 2"
| 算法名称 | 路线长度/m | 扫掠面积/m2 | 最大输入角/(°) | 输入角极差/(°) | 输入角震荡次数 |
| RRT* | 136.03 | 1 565.52 | - | - | - |
| CL-RRT | 197.75 | 1 372.16 | 45 | 90 | 6 |
| CL-RRT+MPC | 158.01 | 1 098.43 | 26.30 | 52.60 | 2 |
| 对比结果 | 减少20.1% | 减少20.0% | 减少41.6% | 减少41.6% | 平滑 |

Fig.12
Path planning diagram of three algorithms in Scenario 3"

Table 3
Comparison of experimental results in scenario 3"
| 算法名称 | 路线长度/m | 扫掠面积/m2 | 最大输入角/(°) | 输入角极差/(°) | 输入角震荡次数 |
| RRT* | 186.85 | 1 769.20 | - | - | - |
| CL-RRT | 184.18 | 1 321.41 | 45 | 90 | 10 |
| CL-RRT+MPC | 177.63 | 1 218.48 | 14.02 | 21.28 | 1 |
| 对比结果 | 减少3.6% | 减少7.8% | 减少68.8% | 减少76.4% | 平滑 |
| 1 |
WANG X W , LIU J , SU X C , et al. A review on carrier aircraft dispatch path planning and control on deck[J]. Chinese Journal of Aeronautics, 2020, 33 (12): 3039- 3057.
doi: 10.1016/j.cja.2020.06.020 |
| 2 | MICHINI B, HOW J P. A human-interactive course of action planner for aircraft carrier deck operations[C]//Proc. of the AIAA Information Technology, 2011: 1515-1525. |
| 3 | ZHANG Z, LIN S L, DONG R, et al. Designing a human-computer cooperation decision planning system for aircraft carrier deck scheduling[C]//Proc. of the AIAA Information Technology, 2015. |
| 4 | WU Y , SUN L G , QU X J . A sequencing model for a team of aircraft landing on the carrier[J]. Aerospace Science and Technology, 2016, 54 (1): 72- 87. |
| 5 | 张智, 林圣琳, 邱兵, 等. 舰载机牵引系统甲板调运避碰路径规划[J]. 系统工程与电子技术, 2014, 36 (8): 1551- 1557. |
| ZHANG Z , LIN S L , QIU B , et al. Collision avoidance path planning of carrier aircraft traction system in dispatching on deck[J]. Systems Engineering and Electronics, 2014, 36 (8): 1551- 1557. | |
| 6 |
WU Y , QU X J . Obstacle avoidance and path planning for carrier aircraft launching[J]. Chinese Journal of Aeronautics, 2015, 28 (3): 695- 703.
doi: 10.1016/j.cja.2015.03.001 |
| 7 | 薛均晓, 孔祥燕, 郭毅博, 等. 基于深度强化学习的舰载机动态避障方法[J]. 计算机辅助设计与图形学学报, 2021, 33 (7): 1102- 1112. |
| XUE J X , KONG X Y , GUO Y B , et al. Dynamic obstacle avoidance method for carrier aircraft based on deep reinforcement learning[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33 (7): 1102- 1112. | |
| 8 | 刘珏. 基于逆强化学习的舰载机牵引车路径规划研究[D]. 哈尔滨: 哈尔滨工程大学, 2017. |
| LIU Y. Research on path planning of carrier aircraft tractor based on inverse reinforcement learning[D]. Harbin: Harbin Engineering University, 2017. | |
| 9 | 宫雪. 舰载机牵引系统的路径规划与轨迹跟踪研究[D]. 武汉: 华中科技大学, 2021. |
| GONG X. Research on path planning and trajectory tracking of tractor-carrier aircraft system[D]. Wuhan: Huazhong University of Science and Technology, 2021. | |
| 10 | 刘亚杰, 李忠猛, 陈晓山. 考虑空间约束的机库舰载机调运路径规划方法[J]. 海军工程大学学报, 2014, 3 (26): 100- 103. |
| LIU Y J , LI Z M , CHEN X S . Path planning for transferring shipborne aircraft restricted to hangar space[J]. Journal of Naval University of Engineering, 2014, 3 (26): 100- 103. | |
| 11 | 张竞, 吴宇, 屈香菊. 舰载机牵引系统路径规划方法[J]. 北京航空航天大学学报, 2018, 44 (10): 2125- 2133. |
| ZHANG J , WU Y , QU X J . Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44 (10): 2125- 2133. | |
| 12 | 刘洁, 董献洲, 韩维, 等. 采用牛顿迭代保辛伪谱算法的舰载机甲板路径规划[J]. 浙江大学学报(工学版), 2020, 54 (9): 1827- 1838. |
| LIU J , DONG X Z , HAN W , et al. Trajectory planning for carrier aircraft on deck using Newton symplectic pseudo-spectral method[J]. Journal of Zhejiang University (Engineering Science), 2020, 54 (9): 1827- 1838. | |
| 13 | 韩维, 刘子玄, 苏析超, 等. 结合启发式与最优控制的舰载机甲板路径规划算法[J]. 系统工程与电子技术, 2023, 45 (4): 1098- 1110. |
| HAN W , LIU Z X , SUN X C , et al. Deck path planning of carrier-based aircraft based on heuristic and optimal control[J]. Systems Engineering and Electronics, 2023, 45 (4): 1098- 1110. | |
| 14 |
DIJKSTRA E W . A note on two problems in connexion with graphs[J]. Numerische Mathematik, 1959, 1 (1): 269- 271.
doi: 10.1007/BF01386390 |
| 15 |
HART P , NILSSON N , RAPHAEL B . A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Trans.on Systems Science Cybernetics, 1968, 4 (2): 100- 107.
doi: 10.1109/TSSC.1968.300136 |
| 16 | HUPTYCH M , ROCK S . Online path planning in dynamic environments using the curve shortening flow method[J]. Production Engineering, 2015, 9 (5/6): 613- 621. |
| 17 |
WU Z P , MENG Z J , ZHAO W L , et al. Fast-RRT: a RRT-based optimal path finding method[J]. Applied Sciences-Basel, 2021, 11 (24): 11777- 11794.
doi: 10.3390/app112411777 |
| 18 |
GAN Y , ZHANG B , KE C , et al. Research on robot motion planning based on RRT algorithm with nonholonomic constraints[J]. Neural Processing Letters, 2021, 53 (4): 3011- 3029.
doi: 10.1007/s11063-021-10536-4 |
| 19 |
KARKEE M , STEWARD B L . Study of the open and closed loop characteristics of a tractor and a single axle towed implement system[J]. Journal of Terramechanics, 2010, 47 (6): 379- 393.
doi: 10.1016/j.jterra.2010.05.005 |
| 20 | LJUNGQVIST O. Motion planning and stabilization for a reversing truck and trailer system[D]. Sweden: Linkoping University, 2015. |
| 21 | LAVALL S M , KUFFNER J J . Randomized kinodynamic planning[J]. International Journal of Robotics & Research, 2001, 5 (15): 378- 400. |
| 22 | TAHIROVIC A , MAGNANI G . A roughness-based RRT for mobile robot navigation planning[J]. IFAC Proceedings Volumes, 2011, 1 (44): 5944- 5949. |
| 23 |
LEONARD J , HOW J , TELLER S , et al. A perception-driven autonomous urban vehicle[J]. Journal of Field Robotics, 2008, 25 (10): 727- 774.
doi: 10.1002/rob.20262 |
| 24 |
KUWATA Y , TEO J , FIORE G , et al. Real-time motion planning with applications to autonomous urban driving[J]. IEEE Trans.on Control Systems Technology, 2009, 17 (5): 1105- 1118.
doi: 10.1109/TCST.2008.2012116 |
| 25 | MANAV A C , LAZOGLU I . A novel cascade path planning algorithm for autonomous truck-trailer parking[J]. IEEE Trans.on Intelligent Transportation Systems, 2023, 23 (7): 6821- 6835. |
| 26 | TAHERI E , FERDOWSI M H , DANESH M . Closed-loop randomized kinodynamic path planning for an autonomous underwater vehicle[J]. Applied Ocean Research, 2019, 83 (7): 48- 64. |
| 27 | LJUNG L , GLAD T . Control theory-multivariable and nonlinear methods[M]. London: Taylor and Francis, 2000. |
| 28 | KIM J C, PAE D S, LIM M T. Obstacle avoidance path planning algorithm based on model predictive control[C]//Proc. of the IEEE 18th International Conference on Control, Automation and Systems, 2018: 141-143. |
| 29 | LIU Z Y, ZHU D Q, YAN M Z. An AUV path planning algorithm based on model predictive control and obstacle restraint[C]//Proc. of the 14th International Conference on Intelligent Robotics and Applications, 2021, 13016: 617-627. |
| 30 | DIMITRI P B . Reinforcement learning and optimal control[M]. Beijing: Tsinghua University Press, 2020. |
| [1] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [2] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [3] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| [4] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [5] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [6] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [7] | Qinglu WANG, Fengguo WU, Chengchen ZHENG, Hui LI. UAV path planning based on optimized artificial potential field method [J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. |
| [8] | Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control [J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110. |
| [9] | Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm [J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. |
| [10] | Jingyu WU, Shiqiang ZHU, Wei SONG, Haolei SHI, Zenan WU. Coverage path planning based on improved cellular decomposition [J]. Systems Engineering and Electronics, 2023, 45(12): 3949-3957. |
| [11] | Guixiang ZHAO, Chenxu WANG, Heping WANG, Yunmiao LI. Local path planning for unmanned surface vehicle using improved velocity obstacle method [J]. Systems Engineering and Electronics, 2023, 45(12): 3975-3983. |
| [12] | Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. |
| [13] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [14] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [15] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||