Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (7): 2170-2182.doi: 10.12305/j.issn.1001-506X.2023.07.28
• Guidance, Navigation and Control • Previous Articles Next Articles
3D path planning for AUV based on improved whaleoptimization algorithm
Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU
- School of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026, China
-
Received:2022-05-09Online:2023-06-30Published:2023-07-11 -
Contact:Guangqiang LI
CLC Number:
Cite this article
Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm[J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182.
share this article

Fig.1
Decomposition of the search space"


Fig.2
Velocity vi of AUV relative to seafloor under the influence of ocean currents"


Fig.3
Underwater topographies selected for the experiments"
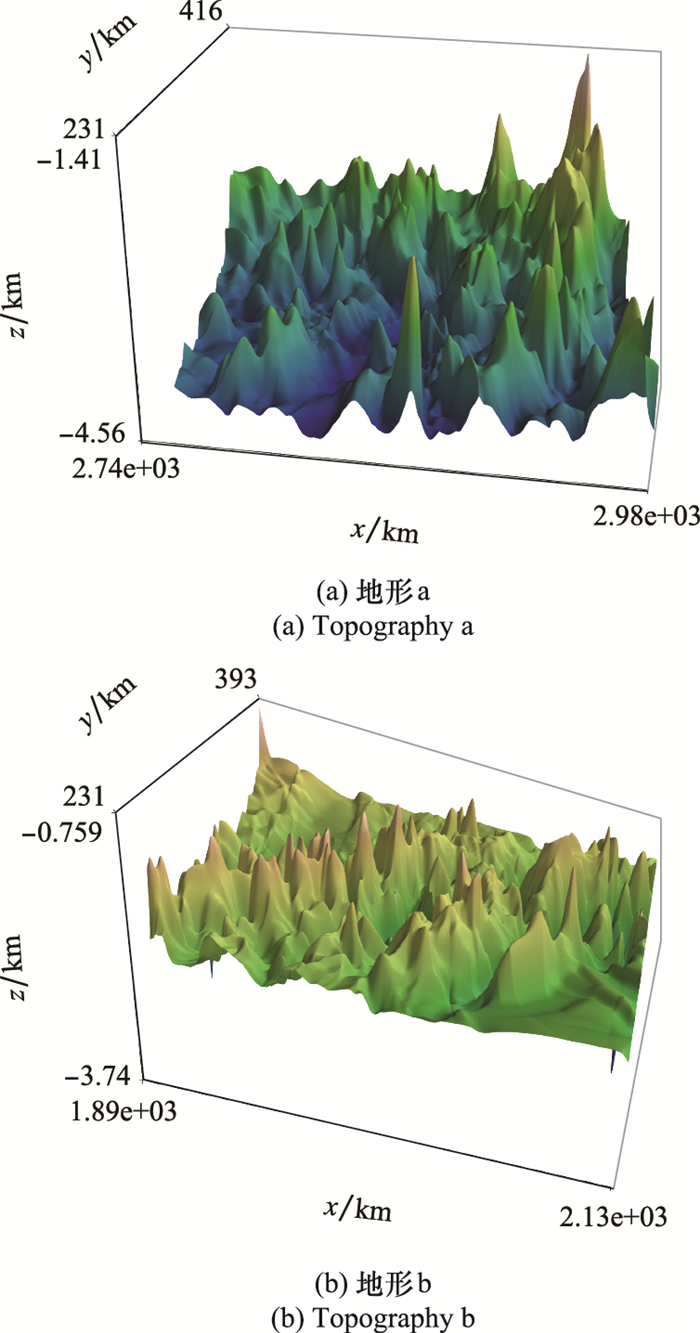
Table 1
Parameter settings of the experimental cases"
| 情形 | 地形 | 海流 | 起始点/km | 目标点/km |
| 1 | a | m | (2 758.82, 415.89, -1.43) | (2 964.60, 301.25, -4.01) |
| 2 | b | n | (1 910.45, 236.25, -0.47) | (2 113.89, 351.25, -3.16) |
| 3 | a | n | (2 758.82, 415.89, -3.09) | (2 964.60, 301.25, -4.01) |
| 4 | b | m | (1 910.45, 236.25, -1.98) | (2 113.89, 351.25, -3.16) |
Table 2
Waypoint settings of the experimental cases"
| 情形 | 基本路径点数目 | 倍增路径点数目 | ||
| 1倍 | 2倍 | 3倍 | ||
| 1 | 5 | 5 | 10 | 15 |
| 2 | 6 | 6 | 12 | 18 |
| 3 | 6 | 6 | 12 | 18 |
| 4 | 7 | 7 | 14 | 21 |

Fig.4
Optimal paths obtained by each algorithm in case 1 and case 2"


Fig.5
Optimal paths obtained by each algorithms in case 3 and Case 4"

Table 3
Comparison of objective function values of the optimal paths obtained by algorithms"
| 情形 | 路径点数 | WOA | BMWOA | IWOSSA | HWOAG | PSO | DE | IWOA |
| 1 | 5 | 336 161.0 | 336 414.8 | 366 179.6 | 358 860.0 | 339 030.2 | 335 388.0 | 335 451.2 |
| 10 | 341 506.8 | 336 081.4 | 428 444.0 | 395 198.4 | 344 247.0 | 335 874.2 | 333 080.8 | |
| 15 | 656 472.4 | 491 059.8 | # | 498 216.6 | 458 622.6 | 341 501.6 | 332 501.4 | |
| 2 | 6 | 242 808.8 | 241 502.8 | 241 340.0 | 249 229.2 | 312 066.2 | 241 209.0 | 242 209.8 |
| 12 | 272 312.4 | 267 106.2 | 271 696.6 | 268 900.2 | # | 239 711.4 | 238 370.6 | |
| 18 | # | # | # | # | # | 262 821.6 | 237 803.2 | |
| 3 | 6 | 276 393.6 | 276 022.8 | 277 964.8 | 279 114.0 | 276 084.8 | 274 896.6 | 274 514.0 |
| 12 | 293 664.4 | 292 704.6 | 293 966.2 | 291 643.0 | 295 763.0 | 268 731.4 | 267 984.8 | |
| 18 | # | # | # | # | # | 270 212.2 | 266 882.4 | |
| 4 | 7 | 354 772.8 | 349 677.8 | 365 973.0 | 376 550.0 | 350 856.0 | 343 702.8 | 345 397.0 |
| 14 | 348 429.8 | 383 541.2 | 430 427.4 | 419 801.8 | 349 842.8 | 345 915.6 | 343 171.4 | |
| 21 | 463 174.0 | 780 443.4 | # | 437 306.6 | 369 718.6 | 353 991.0 | 344 885.4 |
Table 4
Comparison of evaluation times of fitness functions by the algorithms under the same accuracy standard"
| 情形 | 路径点数 | WOA | BMWOA | IWOSSA | HWOAG | PSO | DE | IWOA |
| 1 | 5 | 37 120 | 34 545 | 89 620 | 93 010 | 34 460 | 34 670 | 23 790 |
| 2 | 12 | 53 690 | 51 458 | 95 821 | 91 161 | # | 67 350 | 21 555 |
| 3 | 12 | 71 522 | 87 215 | 93 630 | 92 012 | 73 345 | 51 180 | 18 185 |
| 4 | 21 | 59 583 | 89 338 | # | 12 240 | 23 969 | 24 290 | 15 205 |
Table 5
Comparison of success rate and standard deviation of planning results by algorithms"
| 情形 | 路径点数 | 性能指标 | WOA | BMWOA | IWOSSA | HWOAG | PSO | DE | IWOA |
| 1 | 5 | 成功率/% | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 相关标准差 | 15 220.0 | 8 523.0 | 10 316.2 | 57 898.4 | 28 723.2 | 4 149.2 | 412.2 | ||
| 10 | 成功率/% | 100 | 100 | 50 | 100 | 100 | 100 | 100 | |
| 相关标准差 | 84 120.0 | 96 531.8 | 110 657.2 | 33 609.4 | 85 818.8 | 11 422.2 | 2 700.0 | ||
| 15 | 成功率/% | 90 | 90 | 0 | 100 | 50 | 100 | 100 | |
| 相关标准差 | 37 331.8 | 104 553.8 | # | 13 016.0 | 103 182.4 | 18 616.4 | 7 307.1 | ||
| 2 | 6 | 成功率/% | 50 | 90 | 30 | 40 | 20 | 100 | 100 |
| 相关标准差 | 6 953.8 | 1 169.4 | 7 935.6 | 9 259.2 | 10 552.6 | 881.8 | 385.4 | ||
| 12 | 成功率/% | 20 | 40 | 30 | 30 | 0 | 90 | 100 | |
| 相关标准差 | 79 273.2 | 76 167.8 | 106 734.6 | 25 870.6 | # | 3 844.2 | 457.6 | ||
| 18 | 成功率/% | 0 | 0 | 0 | 0 | 0 | 50 | 90 | |
| 相关标准差 | # | # | # | # | # | 58 781.6 | 4 809.2 | ||
| 3 | 6 | 成功率/% | 30 | 30 | 40 | 30 | 20 | 100 | 100 |
| 相关标准差 | 3 187.6 | 5 630.0 | 7 450.2 | 2 852.6 | 3 867.0 | 382.4 | 338.0 | ||
| 12 | 成功率/% | 30 | 20 | 30 | 30 | 20 | 100 | 100 | |
| 相关标准差 | 57 039.6 | 63 058.2 | 94 418.4 | 26 315.4 | 87 847.8 | 1 475.4 | 699.2 | ||
| 18 | 成功率/% | 0 | 0 | 0 | 0 | 0 | 60 | 100 | |
| 相关标准差 | # | # | # | # | # | 15 598.6 | 1 074.1 | ||
| 4 | 7 | 成功率/% | 100 | 100 | 100 | 100 | 90 | 100 | 100 |
| 相关标准差 | 15 595.6 | 14 198.8 | 9 887.6 | 9 218.0 | 8 257.4 | 1 740.0 | 1 185.2 | ||
| 14 | 成功率/% | 90 | 80 | 70 | 90 | 50 | 100 | 100 | |
| 相关标准差 | 51 063.6 | 90 897.0 | 71 124.6 | 11 736.0 | 61 446.6 | 6 098.2 | 6 858.7 | ||
| 21 | 成功率/% | 70 | 60 | 0 | 100 | 40 | 100 | 100 | |
| 相关标准差 | 109 533.2 | 91 635.6 | # | 28 546.6 | 55 493.0 | 16 471.6 | 13 157.1 |
| 24 |
CENCINI M , LACORATA G , VULPIANI A , et al. Mixing in a meandering jet: a markovian approximation[J]. Journal of Physical Oceanography, 1999, 29 (10): 2578- 2594.
doi: 10.1175/1520-0485(1999)029<2578:MIAMJA>2.0.CO;2 |
| 25 | KALA R , WARWICK K . Multi-vehicle planning using RRT-connect[J]. Paladyn, Journal of Behavioral Robotics, 2011, 2 (3): 134- 144. |
| 26 | BOUTER A , ALDERLIESTEN T , BOSMAN P A N . Achieving highly scalable evolutionary real-valued optimization by exploiting partial evaluations[J]. Evolutionary Computation, 2021, 29 (1): 129- 155. |
| 27 | BOUTER A, ALDERLIESTEN T, WITTEVEEN C, et al. Exploiting linkage information in real-valued optimization with the real-valued gene-pool optimal mixing evolutionary algorithm[C]//Proc. of the Genetic and Evolutionary Computation Conference, 2017: 705-712. |
| 28 | OLIEMAN C , BOUTER A , BOSMAN P A N . Fitness-based linkage learning in the real-valued gene-pool optimal mixing evolutionary algorithm[J]. IEEE Trans.on Evolutionary Computation, 2021, 25 (2): 358- 370. |
| 29 | WANG Y P , LIU H Y , WEI F , et al. Cooperative coevolution with formula-based variable grouping for large-scale global optimization[J]. Evolutionary Computation, 2018, 26 (4): 569- 596. |
| 30 | LIU Y H , CAO B Y , LI H H . Improving ant colony optimization algorithm with epsilon greedy and levy flight[J]. Complex & Intelligent Systems, 2021, 7 (4): 1711- 1722. |
| 31 | LI G Q, DONG W C, WANG Y J, et al. Path planning of underwater vehicles based on improved whale optimization algorithm[C]//Proc. of the International Conference on Automation, Control and Robotics Engineering, 2021: 444-448. |
| 32 | WANG M , LUO J , WALTER U . Trajectory planning of free-floating space robot using particle swarm optimization (PSO)[J]. Acta Astronautica, 2015, 112, 77- 88. |
| 33 | ZAMUDA A , HERNÁNDEZ SOSA J D . Differential evolution and underwater glider path planning applied to the short-term opportun-nistic sampling of dynamic mesoscale ocean structures[J]. Applied Soft Computing, 2014, 24, 95- 108. |
| 34 | GEBCO Compilation Group. The GEBCO_2020 grid[EB/OL]. [2022-04-17]. https://www.gebco.net/data_and_products/gridded_bathymetry_data/gebco_2020. |
| 1 |
ATAEI M , YOUSEFI-KOMA A . Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle[J]. Robotics and Autonomous Systems, 2015, 67, 23- 32.
doi: 10.1016/j.robot.2014.10.007 |
| 2 |
ZENG Z , LIAN L , SAMMUT K , et al. A survey on path planning for persistent autonomy of autonomous underwater vehicles[J]. Ocean Engineering, 2015, 110, 303- 313.
doi: 10.1016/j.oceaneng.2015.10.007 |
| 3 |
LI Y , MA T , CHEN P Y , et al. Autonomous underwater vehicle optimal path planning method for seabed terrain matching navigation[J]. Ocean Engineering, 2017, 133, 107- 115.
doi: 10.1016/j.oceaneng.2017.01.026 |
| 4 | LIU X A , MA D L , YANG M Q , et al. Modified block A* path-planning method for hybrid-driven underwater gliders[J]. IEEE Journal of Oceanic Engineering, 2021, 47 (1): 20- 31. |
| 5 |
GE H Q , CHEN G B , XU G . Multi-AUV cooperative target hunting based on improved potential field in a surface-water environment[J]. Applied Sciences, 2018, 8 (6): 973.
doi: 10.3390/app8060973 |
| 6 | 冯豪博, 胡桥, 赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44 (7): 2251- 2262. |
| FENG H B , HU Q , ZHAO Z Y . AUV swarm path planning based on elite family genetic algorithm[J]. Systems Engineering and Electronics, 2022, 44 (7): 2251- 2262. | |
| 7 | 张岳星, 王轶群, 李硕, 等. 基于海图和改进粒子群优化算法的AUV全局路径规划[J]. 机器人, 2020, 42 (1): 120- 128. |
| ZHANG Y X , WANG Y Q , LI S , et al. Global path planning for AUV based on charts and the improved particle swarm optimization algorithm[J]. Robot, 2020, 42 (1): 120- 128. | |
| 8 |
TAHERI E , FERDOWSI M H , DANESH M . Closed-loop randomized kinodynamic path planning for an autonomous underwater vehicle[J]. Applied Ocean Research, 2019, 83, 48- 64.
doi: 10.1016/j.apor.2018.12.008 |
| 9 |
CHEN M Z , ZHU D Q . Optimal time-consuming path planning for autonomous underwater vehicles based on a dynamic neural network model in ocean current environments[J]. IEEE Trans.on Vehicular Technology, 2020, 69 (12): 14401- 14412.
doi: 10.1109/TVT.2020.3034628 |
| 10 |
ALBARAKATI S , LIMA R M , GIRALDI L , et al. Optimal 3D trajectory planning for AUVs using ocean general circulation models[J]. Ocean Engineering, 2019, 188, 106266.
doi: 10.1016/j.oceaneng.2019.106266 |
| 11 |
ALBARAKATI S , LIMA R M , THEUSSL T , et al. Optimal 3D time-energy trajectory planning for auvs using ocean general circulation models[J]. Ocean Engineering, 2020, 218, 108057.
doi: 10.1016/j.oceaneng.2020.108057 |
| 12 |
MA Y N , GONG Y J , XIAO C F , et al. Path planning for autonomous underwater vehicles: an ant colony algorithm incorporating alarm pheromone[J]. IEEE Trans.on Vehicular Technology, 2019, 68 (1): 141- 154.
doi: 10.1109/TVT.2018.2882130 |
| 13 |
ZENG Z , LAMMAS A , SAMMUT K , et al. Shell space decomposition based path planning for AUVs operating in a variable environment[J]. Ocean Engineering, 2014, 91, 181- 195.
doi: 10.1016/j.oceaneng.2014.09.001 |
| 14 |
MIRJALILI S , LEWIS A . The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95, 51- 67.
doi: 10.1016/j.advengsoft.2016.01.008 |
| 15 |
BUI D T , ABDULLAHI M M , GHAREH S , et al. Fine-tuning of neural computing using whale optimization algorithm for predicting compressive strength of concrete[J]. Engineering with Computers, 2021, 37 (1): 701- 712.
doi: 10.1007/s00366-019-00850-w |
| 16 |
PETROVIC M , MILJKOVIC Z , JOKIC A . A novel methodo-logy for optimal single mobile robot scheduling using whale optimization algorithm[J]. Applied Soft Computing, 2019, 81, 105520.
doi: 10.1016/j.asoc.2019.105520 |
| 17 |
SAAFAN M M , EL-GENDY E M . IWOSSA: an improved whale optimization salp swarm algorithm for solving optimization problems[J]. Expert Systems with Applications, 2021, 176, 114901.
doi: 10.1016/j.eswa.2021.114901 |
| 18 |
ZHANG X M , WEN S C . Hybrid whale optimization algorithm with gathering strategies for high-dimensional problems[J]. Expert Systems with Applications, 2021, 179, 115032.
doi: 10.1016/j.eswa.2021.115032 |
| 19 | 褚鼎立, 陈红, 王旭光. 基于自适应权重和模拟退火的鲸鱼优化算法[J]. 电子学报, 2019, 47 (5): 992- 999. |
| CHU D L , CHEN H , WANG X G . Whale optimization algorithm based on adaptive weight and simulated annealing[J]. Acta Electronica Sinica, 2019, 47 (5): 992- 999. | |
| 20 | HEIDARI A A , ALJARAH I , FARIS H , et al. An enhanced associative learning-based exploratory whale optimizer for glo-bal optimization[J]. Neural Computing & Applications, 2020, 32 (9): 5185- 5211. |
| 21 |
ABD ELAZIZ M , LU S F , HE S B . A multi-leader whale optimization algorithm for global optimization and image segmentation[J]. Expert Systems with Applications, 2021, 175, 114841.
doi: 10.1016/j.eswa.2021.114841 |
| 22 |
SUN Y J , CHEN Y . Multi-population improved whale optimization algorithm for high dimensional optimization[J]. Applied Soft Computing, 2021, 112, 107854.
doi: 10.1016/j.asoc.2021.107854 |
| 23 | HADSELL R, BAGNELL J A, HUBER D, et al. Accurate rough terrain estimation with space-carving kernels[C]//Proc. of the Robotics: Science and Systems, 2009. |
| [1] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [2] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [3] | Qinglu WANG, Fengguo WU, Chengchen ZHENG, Hui LI. UAV path planning based on optimized artificial potential field method [J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. |
| [4] | Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control [J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110. |
| [5] | Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm [J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. |
| [6] | Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. |
| [7] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [8] | Yongqi GAO, Weiqiang MA, Linsen ZHANG, Peng WANG, Miao ZHAO. Distributed multi-AUVs cooperative search method [J]. Systems Engineering and Electronics, 2022, 44(5): 1670-1676. |
| [9] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [10] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [11] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [12] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [13] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [14] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [15] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||