Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (12): 3975-3983.doi: 10.12305/j.issn.1001-506X.2023.12.28
• Guidance, Navigation and Control • Previous Articles
Local path planning for unmanned surface vehicle using improved velocity obstacle method
Guixiang ZHAO, Chenxu WANG, Heping WANG, Yunmiao LI
- School of Marine Science and Technology, Tianjin University, Tianjin 300110, China
-
Received:2022-12-29Online:2023-11-25Published:2023-12-05 -
Contact:Chenxu WANG
CLC Number:
Cite this article
Guixiang ZHAO, Chenxu WANG, Heping WANG, Yunmiao LI. Local path planning for unmanned surface vehicle using improved velocity obstacle method[J]. Systems Engineering and Electronics, 2023, 45(12): 3975-3983.
share this article

Fig.1
Schematic diagram of VO method"


Fig.2
Division of encounter situation"


Fig.3
Schematic diagram of the last rudder point of the ownship"


Fig.4
Flowchart of local path planning"


Fig.5
Collision cone formed by ownship and target ship"
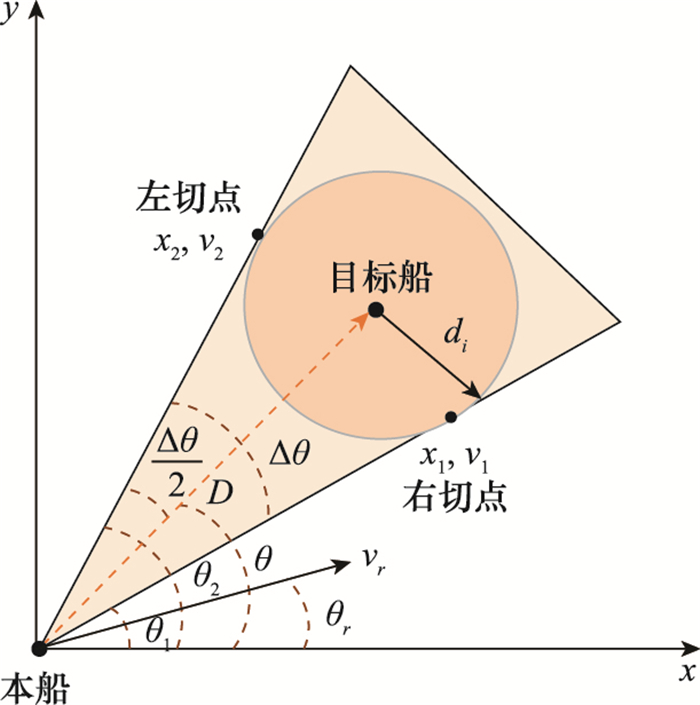
Table 1
Dolphin-I parameters"
| 主要参数 | 参数 |
| 船名 | Dolphin-I |
| 船长/m | 3.2 |
| 船宽/m | 2.2 |
| 总重/kg | 130.0 |
| 进距/m | 16.5 |
| 旋回初径/m | 25.5 |
Table 2
Initial information of the target ships"
| 场景 | 初始位置/m | 航速/(m/s) | 航向/(°) | 会遇态势 |
| 1 | (120, 1 150) | 3 | 180 | 对遇 |
| 2 | (635, 900) | 3 | 240 | 右交叉 |
| 3 | (-225, 850) | 2 | 120 | 左交叉 |
| 4 | (120, 400) | 1 | 000 | 追越 |

Fig.6
Avoidance action in head-on situation"


Fig.7
Avoidance action in right-crossing situation"


Fig.8
Avoidance action in left-crossing situation"


Fig.9
Avoidance action in over-taking situation"


Fig.10
Distance of each scene in avoidance process before improvement"


Fig.11
Distance of each scene in avoidance process after improvement"

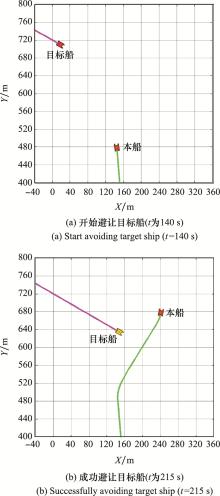
Fig.12
Avoidance action in left-crossing situation before improvements"

Table 3
Collision avoidance results in scenarios 1~4 encounter"
| 场景 | 改进前 | 改进后 | |||
| 避碰距离/m | 避碰耗时/s | 避碰距离/m | 避碰耗时/s | ||
| 1 | 192 | 65 | 162 | 55 | |
| 2 | 177 | 60 | 102 | 35 | |
| 3 | 237 | 80 | 57 | 20 | |
| 4 | 297 | 100 | 222 | 60 | |
Table 4
Parameters in the collision avoidance before improvement"
| 场景 | 安全距离/m | 实际避让距离/s |
| 1 | 100.00 | 368.78 |
| 2 | 100.00 | 317.65 |
| 3 | 100.00 | 268.94 |
| 4 | 100.00 | 135.14 |
Table 5
Parameters in collision avoidance after improvement m"
| 场景 | 安全距离 | 碰撞威胁距离 | 实际避让距离 | 紧迫局面距离 |
| 1 | 17.48 | 218.24 | 217.13 | - |
| 2 | 17.48 | 167.94 | 167.94 | - |
| 3 | 17.48 | 156.11 | 54.20 | 54.20 |
| 4 | 17.48 | 78.71 | 76.77 | - |
| 1 |
WANG J , WANG R T , LU D H , et al. USV Dynamic accurate obstacle avoidance based on improved velocity obstacle method[J]. Electronics, 2022, 11 (17): 2720.
doi: 10.3390/electronics11172720 |
| 2 |
HAND O , YAHIA B , DJAMEL B , et al. Energy-based USV maritime monitoring using multi-objective evolutionary algorithms[J]. Ocean Engineering, 2022, 253, 111182.
doi: 10.1016/j.oceaneng.2022.111182 |
| 3 |
HAN S , WANG L , WANG Y T , et al. An efficient motion planning based on grid map: predicted trajectory approach with global path guiding[J]. Ocean Engineering, 2021, 238, 109696.
doi: 10.1016/j.oceaneng.2021.109696 |
| 4 |
YU K , LIANG X F , LI M Z , et al. USV path planning method with velocity variation and global optimisation based on AIS service platform[J]. Ocean Engineering, 2021, 236, 109560.
doi: 10.1016/j.oceaneng.2021.109560 |
| 5 |
ZHOU C H , GU S D , WEN Y Q , et al. The review unmanned surface vehicle path planning: based on multi-modality constraint[J]. Ocean Engineering, 2020, 200, 107043.
doi: 10.1016/j.oceaneng.2020.107043 |
| 6 | LIN X G, FU Y. Research of USV obstacle avoidance strategy based on dynamic window[C]//Proc. of the IEEE International Conference on Mechatronics and Automation, 2017: 1410-1415. |
| 7 |
CHEN Z , ZHANG Y M , ZHANG Y G , et al. A hybrid path planning algorithm for unmanned surface vehicles in complex environment with dynamic obstacles[J]. IEEE Access, 2019, 7, 126439- 126449.
doi: 10.1109/ACCESS.2019.2936689 |
| 8 |
LYU H G , YIN Y . Fast path planning for autonomous ships in restricted waters[J]. Applied Sciences, 2018, 8 (12): 2592.
doi: 10.3390/app8122592 |
| 9 |
FU X L , HUANG J Z , JING Z L , et al. Complex switching dynamics and chatter alarm for aerial agents with artificial potential field method[J]. Applied Mathematical Modelling, 2022, 107, 637- 649.
doi: 10.1016/j.apm.2022.03.014 |
| 10 |
FIORINI P , SHHILLER Z . Motion planning in dynamic environments using velocity obstacles[J]. International Journal of Robotics Research, 1998, 17 (7): 760- 772.
doi: 10.1177/027836499801700706 |
| 11 | VAN DEN BERG J, LIN M, MANOCHA D. Reciprocal velocity obstacles for real-time multi-agent navigation[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2008: 1928-1935. |
| 12 | VAN DEN BERG J, GUY S, LIN M, et al. Reciprocal N-body collision avoidance[C]//Proc. of the Robotics Research: the 14th International Symposium ISRR, 2011: 3-19. |
| 13 |
陈曦, 王熙, 李宁. 基于分级速度障碍的移动机器人避障算法[J]. 计算机仿真, 2021, 38 (4): 281-285, 290.
doi: 10.3969/j.issn.1006-9348.2021.04.057 |
|
CHEN X , WANG X , LI N . Mobile robot obstacle avoidance algorithm based on hierarchical velocity obstacle[J]. Computer Simulation, 2021, 38 (4): 281-285, 290.
doi: 10.3969/j.issn.1006-9348.2021.04.057 |
|
| 14 |
吴学礼, 陈海璐, 许磊, 等. 改进速度障碍法的无人机冲突解脱方法研究[J]. 电光与控制, 2020, 27 (7): 31- 35.
doi: 10.3969/j.issn.1671-637X.2020.07.006 |
|
WU X L , CHEN H L , XU L , et al. A method for UAV conflict resolution based on improved velocity obstacle method[J]. Electronics Optics & Control, 2020, 27 (7): 31- 35.
doi: 10.3969/j.issn.1671-637X.2020.07.006 |
|
| 15 | 陈海璐. 基于粒子群算法和速度障碍法的无人机避险方法研究[D]. 石家庄: 河北科技大学, 2020. |
| CHEN H L. Research on avoidance method of UAV based on particle swarm optimization and speed obstacle method[D]. Shijiazhuang: Hebei University of Science and Technology, 2020. | |
| 16 | 徐小强, 杨家鼎, 冒燕, 等. 基于速度障碍和改进人工势场算法的无人艇路径规划研究[J]. 武汉理工大学学报, 2022, 44 (7): 96- 102. |
| XU X Q , YANG J D , MAO Y , et al. Study on path planning of USV based on velocity obstacle and improved artificial potential field algorithm[J]. Journal of Wuhan University of Technology, 2022, 44 (7): 96- 102. | |
| 17 | 洪晓斌, 徐郑攀, 魏新勇, 等. 基于改进速度障碍法的水面无人艇动态避障[J]. 光学精密工程, 2021, 29 (9): 2126- 2139. |
| HONG X B , XU Z P , WEI X Y , et al. Dynamic obstacle avoidance of surface unmanned craft based on improved speed obstacle method[J]. Optics and Precision Engineering, 2021, 29 (9): 2126- 2139. | |
| 18 | ZHU X M , YI J J , DING H K , et al. Velocity obstacle based on vertical ellipse for multi-robot collision avoidance[J]. Journal of Intelligent & Robotic Systems, 2020, 99 (1): 183- 208. |
| 19 | 蔡伟斌. 基于海事规则的USV危险规避技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. |
| CAI W B. Research on USV risk avoidance technology based on maritime rules[D]. Harbin: Harbin Engineering University, 2014. | |
| 20 |
MA Y , ZHAO Y , INCECIK A , et al. A collision avoidance approach via negotiation protocol for a swarm of USVs[J]. Ocean Engineering, 2021, 224, 108713.
doi: 10.1016/j.oceaneng.2021.108713 |
| 21 |
JOHANSEN T A , PEREZ T , CRISTOFARO A . Ship collision avoidance and colregs compliance using simulation-based control behavior selection with predictive hazard assessment[J]. IEEE Trans.on Intelligent Transportation Systems, 2016, 17 (12): 3407- 3422.
doi: 10.1109/TITS.2016.2551780 |
| 22 | KUWATA Y, WOLF M T, ZARZHITSKY D, et al. Safe maritime navigation with COLREGS using velocity obstacles[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 4728-4734. |
| 23 |
ZHANG L , MOU J M , CHEN P F , et al. Path planning for autonomous ships: a hybrid approach based on improved APF and modified VO methods[J]. Journal of Marine Science and Engineering, 2021, 9 (7): 761.
doi: 10.3390/jmse9070761 |
| 24 | EMIL H T, MORTEN B. Partly COLREGs-compliant collision avoidance for ASVs using encounter-specific velocity obstacles[C]//Proc. of the IFAC-Papers OnLine, 2022: 37-43. |
| 25 | NIU H, SAVVARIS A, TSOURDOS A. USV geometric collision avoidance algorithm for multiple marine vehicles[C]//Proc. of the OCEANS, 2017: 1446-1456. |
| 26 |
ERIKSEN B O H , BITAR G , BREIVIK M , et al. Hybrid collision avoidance for ASVs compliant with COLREGs rules 8 and 13-17[J]. Frontiers in Robotics and AI, 2020, 7, 11.
doi: 10.3389/frobt.2020.00011 |
| 27 |
WANG N . An intelligent spatial collision risk based on the quaternion ship domain[J]. The Journal of Navigation, 2010, 63 (4): 733- 749.
doi: 10.1017/S0373463310000202 |
| 28 | DINH G H , IM N . The combination of analytical and statistical method to define polygonal ship domain and reflect human experiences in estimating dangerous area[J]. International Journal of E-Navigation and Maritime Economy, 2016, 4 (C): 97- 108. |
| 29 | 苏开文, 赵月林. 紧迫局面的数学模型[J]. 大连海事大学学报, 2007, 115 (1): 17-20, 38. |
| SU K W , ZHAO Y L . Study on the mathematical model of close-quarters situation[J]. Journal of Dalian Maritime University, 2007, 115 (1): 17-20, 38. | |
| 30 |
ZHOU J , DING F , YANG J X , et al. Navigation safety domain and collision risk index for decision support of collision avoidance of USVs[J]. International Journal of Naval Architecture and Ocean Engineering, 2021, 13, 340- 350.
doi: 10.1016/j.ijnaoe.2021.03.001 |
| [1] | Shaolong YANG, Jin HUANG, Xianbo XIANG, Weichao LI. Optimization of USV area coverage path planning based on confidence ellipsoid [J]. Systems Engineering and Electronics, 2022, 44(7): 2263-2269. |
| [2] | Daidai CHEN, Wanyou LI. Local path planning algorithm for USV with towed cable [J]. Systems Engineering and Electronics, 2020, 42(9): 1988-1994. |
| [3] | ZHANG Ru-bo,ZOU Qi-jie,YANG Ge,SU Hang. Adaptive autonomy control structure and algorithm for USV under uncertainty [J]. Systems Engineering and Electronics, 2014, 36(1): 128-135. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||