Systems Engineering and Electronics ›› 2023, Vol. 46 ›› Issue (1): 290-299.doi: 10.12305/j.issn.1001-506X.2024.01.33
• Guidance, Navigation and Control • Previous Articles
Destination prediction of UAV cluster trajectory based on EMD-DESN
Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU
- Air and Missile Defense College, Air Force Engineering University, Xi'an 710051, China
-
Received:2022-11-21Online:2023-12-28Published:2024-01-11 -
Contact:Xirui XUE
CLC Number:
Cite this article
Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU. Destination prediction of UAV cluster trajectory based on EMD-DESN[J]. Systems Engineering and Electronics, 2023, 46(1): 290-299.
share this article

Fig.1
Unmanned aerial vehicle cluster operation process"

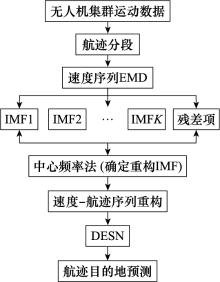
Fig.2
Destination prediction process based on EMD-DESN algorithm"


Fig.3
DESN structure"


Fig.4
DESN destination prediction method"

Table 1
Destination location"
| 目的地 | 坐标(x, y)/m |
| D1 | (1 400, 2 040) |
| D2 | (1 960, 2 500) |
| D3 | (2 560, 3 360) |
| D4 | (2 880, 2 940) |
| D5 | (3 440, 2 680) |

Fig.5
Cluster trajectory simulation results"


Fig.6
Cluster speed convergence"


Fig.7
EMD decomposition results of speed series"
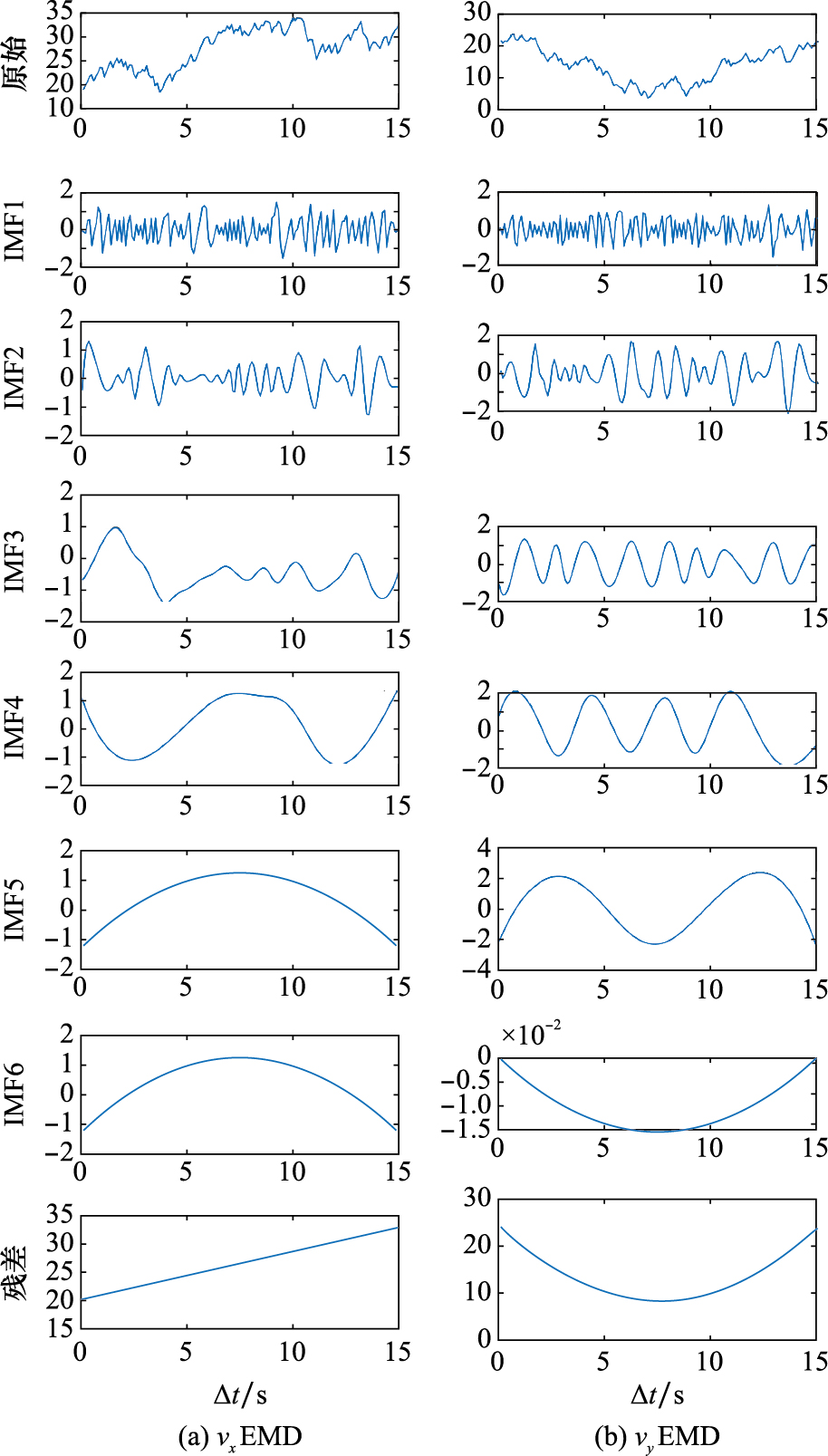
Table 2
IMF center frequency of each order Hz"
| 模态 | vx中心频率 | vy中心频率 |
| IMF1 | 2.56 | 2.81 |
| IMF2 | 1.06 | 1.04 |
| IMF3 | 0.34 | 0.67 |
| IMF4 | 0.19 | 0.31 |
| IMF5 | 0.14 | 0.20 |
| IMF6 | 0.14 | 0.14 |

Fig.8
IMF power spectrum of each order"


Fig.9
Trajectory C2 reconstruction results"

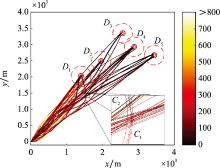
Fig.10
Whole journey destination prediction RMSE"


Fig.11
Average RMSE comparison"

Table 3
RMSE of each algorithm"
| 算法 | 时刻/s | ||||
| 20 | 40 | 60 | 80 | 100 | |
| DESN | 276.3 | 423.3 | 216.9 | 209.0 | 88.3 |
| EMD-ESN | 288.3 | 432.0 | 306.0 | 329.0 | 70.6 |
| EMD-DESN | 235.6 | 392.9 | 162.3 | 180.6 | 83.5 |
| EMD效果/% | 14.7 | 7.2 | 25.2 | 13.6 | 5.4 |
Table 4
Correctly predicted time s"
| 算法 | 第1次 | 第2次 |
| DESN | 14.3 | 56.2 |
| EMD-ESN | - | 83.2 |
| EMD-DESN | 7.5 | 55.7 |

Fig.12
Proportion of correct prediction of destination"

| 1 | BORDEAUX J. Self-organized air tasking: examining a non-hierarchical model for joint air operations[R]. Fairfax: SRA International Inc., 2004. |
| 2 | 党爱国, 王坤, 王延密, 等. 无人机集群作战概念发展对未来战场攻防影响[J]. 战术导弹技术, 2019, 193 (1): 37- 41. |
| DANG A G , WANG K , WANG Y M , et al. The impact of UAVs swarming fighting concept development on attack and defense in future battlefield[J]. Tactical Missile Technology, 2019, 193 (1): 37- 41. | |
| 3 | 葛顺, 夏学知. 用于战术意图识别的动态序列贝叶斯网络[J]. 系统工程与电子技术, 2014, 36 (1): 76- 83. |
| GE S , XIA X Z . DSBN used for recognition of tactical intention[J]. Systems Engineering and Electronics, 2014, 36 (1): 76- 83. | |
| 4 | GUO L , CHEN F , GAO C , et al. Performance measurement model of multi-source data fusion based on network situation awareness[J]. Przegląd Elektrotechniczny, 2012, 88 (7): 315- 319. |
| 5 |
熊伟, 何友. 信息融合系统中的态势预测技术[J]. 火力与指挥控制, 2001, 26 (4): 47- 50.
doi: 10.3969/j.issn.1002-0640.2001.04.012 |
|
XIONG W , HE Y . Research situation prediction in data fusion system[J]. Fire Control & Command Control, 2001, 26 (4): 47- 50.
doi: 10.3969/j.issn.1002-0640.2001.04.012 |
|
| 6 |
XUE X R , HUANG S C , XIE J H , et al. Resolvable cluster target tracking based on the DBSCAN clustering algorithm and labeled RFS[J]. IEEE Access, 2021, 9, 43364- 43377.
doi: 10.1109/ACCESS.2021.3066629 |
| 7 | REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model[C]//Proc. of the 14th Annual Conference on Computer Graphics and Interactive Techniques, 1987: 25-34. |
| 8 |
VICSEK T , CZIROK A , BEN-JACOB E , et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75, 1226- 1229.
doi: 10.1103/PhysRevLett.75.1226 |
| 9 |
COUZIN I , KRAUSE J , FRANKS N , et al. Effective leadership and decision-making in animal groups on the move[J]. Nature, 2005, 433 (7025): 513- 516.
doi: 10.1038/nature03236 |
| 10 |
DENG C , WEN C Y , HUANG J S , et al. Distributed observer- based cooperative control approach for uncertain nonlinear MASs under event-triggered communication[J]. IEEE Trans. on Automatic Control, 2022, 67 (5): 2669- 2676.
doi: 10.1109/TAC.2021.3090739 |
| 11 |
YU J L , DONG X W , LI Q D , et al. Fully adaptive practical time-varying output formation tracking for high-order nonlinear stochastic multiagent system with multiple leaders[J]. IEEE Trans. on Cybernetics, 2021, 51 (4): 2265- 2277.
doi: 10.1109/TCYB.2019.2956316 |
| 12 |
WANG Y W , LIU X K , XIAO J W , et al. Output formation- containment of interacted heterogeneous linear systems by distributed hybrid active control[J]. Automatica, 2018, 93, 26- 32.
doi: 10.1016/j.automatica.2018.03.020 |
| 13 |
LI W H , ZHANG H G , GAO Z Y , et al. Fully distributed event/self-triggered bipartite output formation-containment tracking control for heterogeneous multiagent systems[J]. IEEE Trans. on Neural Networks and Learning Systems, 2023, 34 (10): 7851- 7860.
doi: 10.1109/TNNLS.2022.3146814 |
| 14 |
OLFATI-SABER R . Flocking for multi-agent dynamic systems: algorithms and theory[J]. IEEE Trans. on Automatic Control, 2006, 51 (3): 401- 420.
doi: 10.1109/TAC.2005.864190 |
| 15 | SORIA E, SCHIANO F, FLOREANO D. SwarmLab: a MATLAB drone swarm simulator[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2020: 8005-8011. |
| 16 |
FU Q , LIANG X , ZHANG J , et al. Intent inference based trajectory prediction and smooth for UAS in low-altitude airspace with geofence[J]. Computers, Materials and Continua, 2020, 62 (3): 417- 444.
doi: 10.32604/cmc.2020.07044 |
| 17 | 郭小宾, 王壮, 胡卫东. 基于贝叶斯网络的目标融合识别方法研究[J]. 系统仿真学报, 2005, 17 (11): 144- 147. |
| GUO X B , WANG Z , HU W D . Information fusion with Bayesian networks for target recognition[J]. Journal of System Simulation, 2005, 17 (11): 144- 147. | |
| 18 | 薛锡瑞, 黄树彩, 韦道知. 基于桥接分布的无人机集群作战意图推断[J]. 北京航空航天大学学报, 2023, 49. |
| XUE X R , HUANG S C , WEI D Z . Operational intention inference of UAV cluster based on bridging distributions[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49 (10): 2679- 2688. | |
| 19 |
HOSSEINI S , IVANOV D . Bayesian networks for supply chain risk, resilience and ripple effect analysis: a literature review[J]. Expert Systems with Applications, 2020, 161, 113649.
doi: 10.1016/j.eswa.2020.113649 |
| 20 |
FAN S , ZHANG J , BLANCO-DAVIS E , et al. Maritime accident prevention strategy formulation from a human factor perspective using Bayesian networks and TOPSIS[J]. Ocean Engineering, 2020, 210, 107544.
doi: 10.1016/j.oceaneng.2020.107544 |
| 21 |
乔殿峰, 梁彦, 马超雄, 等. 多域作战下的群目标意图识别与预测[J]. 系统工程与电子技术, 2022, 44 (11): 3403- 3412.
doi: 10.12305/j.issn.1001-506X.2022.11.15 |
|
QIAO D F , LIANG Y , MA C X , et al. Recognition and prediction of group target intention in multi-domain operations[J]. Systems Engineering and Electronics, 2022, 44 (11): 3403- 3412.
doi: 10.12305/j.issn.1001-506X.2022.11.15 |
|
| 22 | 那晓栋, 王嘉宁, 刘墨燃, 等. 基于层次化可塑性回声状态网络的混沌时间序列预测[J]. 控制与决策, 2023, 38 (1): 133- 142. |
| NA X D , WANG J N , LIU M R , et al. Hierarchical plasticity echo state network for chaotic time series prediction[J]. Control and Decision, 2023, 38 (1): 133- 142. | |
| 23 |
CLAUDIO G , ALESSIO M , LUCA P . Design of deep echo state networks[J]. Neural Networks, 2018, 108, 33- 47.
doi: 10.1016/j.neunet.2018.08.002 |
| 24 | KIM T , KING B R . Time series prediction using deep echo state networks[J]. Neural Computing and Applications, 2020, 32, 3- 4. |
| 25 |
SONG Z , WU K , SHAO J . Destination prediction using deep echo state network[J]. Neurocomputing, 2020, 406, 343- 353.
doi: 10.1016/j.neucom.2019.09.115 |
| 26 | WU Z , LI Q , XIA X H . Multi-timescale forecast of solar irradiance based on multi-task learning and echo state network approaches[J]. IEEE Trans. on Industrial Informatics, 2020, 17 (1): 300- 310. |
| 27 | LONG J Y , ZHANG S H , LI C . Evolving deep echo state networks for intelligent fault diagnosis[J]. IEEE Trans. on Industrial Informatics, 2019, 16 (7): 4928- 4937. |
| 28 |
HUANG N E , SHEN Z , LONG S R , et al. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis[J]. Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences, 1998, 454 (1971): 903- 995.
doi: 10.1098/rspa.1998.0193 |
| 29 | XI X G , WU H , LUO Z Z . De-noising method of the SEMG based on EMD autocorrelation[J]. Chinese Journal of Scientific Instrument, 2014, 35 (11): 2494- 2500. |
| 30 |
SUN Z Y , XI X G , YUAN C M , et al. Surface electromyography signal denoising via EEMD and improved wavelet thresholds[J]. Mathematical Biosciences and Engineering, 2020, 17 (6): 6945- 6962.
doi: 10.3934/mbe.2020359 |
| 31 | 马愈昭, 刘逵, 张岩峰, 等. CEEMD结合改进小波阈值的激光雷达信号去噪算法[J]. 系统工程与电子技术, 2023, 45 (1): 93- 100. |
| MA Y Z , LIU K , ZHANG Y F , et al. Laser radar signal denoising algorithm based on CEEMD combined with improved wavelet threshold[J]. Systems Engineering and Electronics, 2023, 45 (1): 93- 100. | |
| 32 | 王粟, 江鑫, 曾亮, 等. 基于VMD-DESN-MSGP模型的超短期光伏功率预测[J]. 电网技术, 2020, 44 (3): 917- 926. |
| WANG S , JIANG X , ZENG L , et al. Ultra-short-term photovoltaic power prediction based on VMD-DESN-MSGP model[J]. Power System Technology, 2020, 44 (3): 917- 926. | |
| 33 |
STRANDBURG-PESHKIN A , TWOMEY C R , BODE N W F , et al. Visual sensory networks and effective information transfer in animal groups[J]. Current Biology, 2013, 23 (17): 709- 711.
doi: 10.1016/j.cub.2013.07.059 |
| 34 | BALLERINI M , CABIBBO N , CANDELIER R , et al. Interaction ruling animal collective behavior depends on topological rather than metric distance: evidence from a field study[J]. Proceedings of the National Academy of Sciences, 2007, 105 (4): 1232- 1237. |
| 35 | OLFATI-SABER R, MURRAY R M. Flocking with obstacle avoidance: cooperation with limited communication in mobile networks[C]//Proc. of the IEEE 42nd Conference Decision and Control, 2003: 2022-2028. |
| 36 |
GALLICCHIO C , MICHELI A , PEDRELLI L . Deep reservoir computing: a critical experimental analysis[J]. Neurocomputing, 2017, 268, 87- 99.
doi: 10.1016/j.neucom.2016.12.089 |
| 37 |
CHEW J Y , KURABAYASHI D , NAKAMURA Y . Echo state networks with Tikhonov regularization: optimization using integral gain[J]. Advanced Robotics, 2015, 29 (12): 801- 814.
doi: 10.1080/01691864.2015.1010576 |
| 38 |
NEVITT J , HANCOCK G R . Improving the root mean square error of approximation for nonnormal conditions in structural equation modeling[J]. The Journal of Experimental Education, 2000, 68 (3): 251- 268.
doi: 10.1080/00220970009600095 |
| [1] | Ruining LUO, Shucai HUANG, Yan ZHAO, Zhen ZHANG. Guidance strategy of mother-son missile against unmanned aerial vehicle cluster [J]. Systems Engineering and Electronics, 2023, 45(10): 3249-3258. |
| [2] | Yanling SHI, Zipeng LIU, Xueliang ZHANG, Weiliang GU. Feature detection of floating small target on the sea surface based on EMD energy proportion [J]. Systems Engineering and Electronics, 2021, 43(2): 300-310. |
| [3] | Zhenghong PENG, Degui YANG, Xing WANG, Hao WANG, Zhengliang ZHU. Micro-Doppler separation and feature extraction algorithm based on trend estimation [J]. Systems Engineering and Electronics, 2021, 43(12): 3452-3461. |
| [4] | MAO Qiong, ZHANG Daibing, LI Xiaomin, DONG Hairui, DU Zhanlong. Strategy of control and avoidance of UAVs based on neighborhood tracking and identification [J]. Systems Engineering and Electronics, 2018, 40(9): 2071-2078. |
| [5] | WANG Lu, LI Jianxun, HE Tingting. Denoising algorithm of pulsar signal based on EMD with kurtosis test window [J]. Systems Engineering and Electronics, 2017, 39(6): 1208-1214. |
| [6] | CHEN Hailong, WANG Changlong, ZUO Xianzhang, ZHU Hongyun. Metal magnetic memory gradient tensor signal processing method [J]. Systems Engineering and Electronics, 2017, 39(3): 488-493. |
| [7] | LU Zhi-mao, SUN Mei-ling, ZHANG Chun-xiang, JIN Hui. Speech enhancement method based on extremum field mean mode decomposition [J]. Journal of Systems Engineering and Electronics, 2011, 33(7): 1680-1684. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||