Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (5): 1734-1744.doi: 10.12305/j.issn.1001-506X.2024.05.26
• Guidance, Navigation and Control • Previous Articles
Multi-source force combined control method for novel agile projectiles
Xinyun ZHAO, Jianqiao YU
- School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
-
Received:2023-05-24Online:2024-04-30Published:2024-04-30 -
Contact:Jianqiao YU
CLC Number:
Cite this article
Xinyun ZHAO, Jianqiao YU. Multi-source force combined control method for novel agile projectiles[J]. Systems Engineering and Electronics, 2024, 46(5): 1734-1744.
share this article
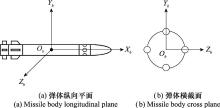
Fig.1
Traditional agile missile body configuration"


Fig.2
Process of heading reversal maneuver of the traditional agile missile"


Fig.3
Novel agile projectiles body configuration"


Fig.4
Heading reversal maneuver of the novel agile projectiles"
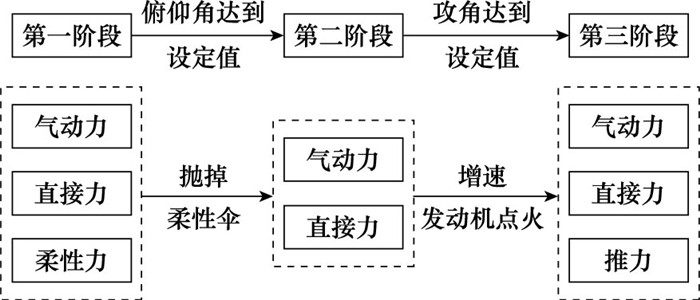

Fig.5
Force analysis diagram of the novel agile projectiles"


Fig.6
Diagram of multi-source force combined controller"

Table 1
Fuzzy rules for the magnitude of flexible force"
| |eγ| | |η| | |||
| ZO | PS | PM | PB | |
| ZO | PS | PS | PS | PM |
| PS | PS | PS | PM | PM |
| PM | PS | PM | PM | PB |
| PB | PM | PM | PB | PB |
Table 2
Time and energy"
| 变量 | tsim/s | EuR/(N·s) | Eut/(N·s) | Etotal/(N·s) |
| 传统 | 4.41 | 3 918.43 | 19 245.00 | 23 163.43 |
| 新型 | 3.78 | 4 597.52 | 15 200.00 | 19 797.52 |
| 效果/% | -14.21 | 17.33 | -21.02 | -14.53 |

Fig.7
Curves of trajectory"

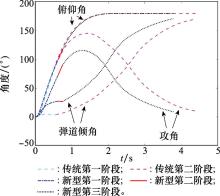
Fig.8
Variation curves for pitch angle, angle of attack and flight path angle"


Fig.9
Variation curves of pitch angular velocity"


Fig.10
Curves of reaction-jet command"


Fig.11
Curves of flight path angular velocity"


Fig.12
Curves of velocity"


Fig.13
Curves of elevator deflection command"


Fig.14
Curves of flexible force command"


Fig.15
Curves of flexible force coefficient"
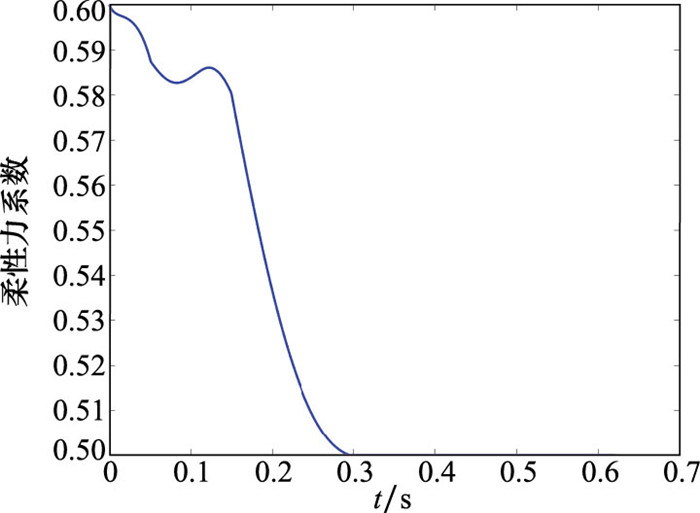

Fig.16
Variation curves of uncertainty"

| 1 |
GONG X P , CHEN W C , CHEN Z Y . All-aspect guidance law for agile missiles based on deep reinforcement learning[J]. Aerospace Science and Technology, 2022, 127, 107677.
doi: 10.1016/j.ast.2022.107677 |
| 2 |
THUKRAL A , INNOCENTI M . A sliding mode missile pitch autopilot synthesis for high angle of attack maneuvering[J]. IEEE Trans.on Control Systems Technology, 1998, 6 (3): 359- 371.
doi: 10.1109/87.668037 |
| 3 |
毕永涛, 王宇航, 姚郁. 直/气复合控制导弹的模型预测和自抗扰姿态控制设计[J]. 宇航学报, 2015, 36 (12): 1373- 1383.
doi: 10.3873/j.issn.1000-1328.2015.12.005 |
|
BI Y T , WANG Y H , YAO Y . Attitude control design of missiles with dual control based on model predictive control and active disturbance rejection control[J]. Journal of Astronautics, 2015, 36 (12): 1373- 1383.
doi: 10.3873/j.issn.1000-1328.2015.12.005 |
|
| 4 |
MA Y Y , GUO J , TANG S J . High angle of attack command generation technique and tracking control for agile missiles[J]. Aerospace Science and Technology, 2015, 45, 324- 334.
doi: 10.1016/j.ast.2015.06.003 |
| 5 | 霍鑫, 彭继平, 马克茂, 等. 空空导弹敏捷转弯的分段线性滑模控制设计[J]. 系统工程与电子技术, 2017, 39 (10): 2278- 2284. |
| HUO X , PENG J P , MA K M , et al. Piecewise linear sliding mode control design for agile turn of air-to-air missile[J]. Systems Engineering and Electronics, 2017, 39 (10): 2278- 2284. | |
| 6 |
GUO Y , GUO J H , LIU X , et al. Finite-time blended control for air-to-air missile with lateral thrusters and aerodynamic surfaces[J]. Aerospace Science and Technology, 2020, 97, 105638.
doi: 10.1016/j.ast.2019.105638 |
| 7 | 刘祥, 李爱军, 郭永, 等. 固定时间收敛的空空导弹直接力/气动力复合控制[J]. 哈尔滨工业大学学报, 2019, 51 (9): 29-34, 42. |
| LIU X , LI A J , GUO Y , et al. Fixed-time convergence blended control for air-to-air missile with lateral thrusters and aerodynamic force[J]. Journal of Harbin Institute of Technology, 2019, 51 (9): 29-34, 42. | |
| 8 |
KIM Y , KIM B S . Pitch autopilot design for agile missiles with uncertain aerodynamic coefficients[J]. IEEE Trans.on Aerospace and Electronic Systems, 2013, 49 (2): 907- 914.
doi: 10.1109/TAES.2013.6494388 |
| 9 |
MAHMOOD A , KIM Y , PARK J . Robust H∞ autopilot design for agile missile with time-varying parameters[J]. IEEE Trans.on Aerospace and Electronic Systems, 2014, 50 (4): 3082- 3089.
doi: 10.1109/TAES.2014.130750 |
| 10 | 赵新运, 于剑桥. 导弹敏捷转弯段的新型非奇异终端滑模控制[J]. 宇航学报, 2022, 43 (4): 454- 464. |
| ZHAO X Y , YU J Q . Novel non-singular terminal sliding mode control for missile's agile turn[J]. Journal of Astronautics, 2022, 43 (4): 454- 464. | |
| 11 | 李政, 于剑桥, 赵新运. 空空导弹敏捷转弯固定时间收敛滑模控制[J]. 航空学报, 2023, 44 (8): 327262. |
| LI Z , YU J Q , ZHAO X Y . Fixed-time convergent sliding mode control for agile turn of air-to-air missiles[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (8): 327262. | |
| 12 | 李健, 房冠辉, 吕智慧, 等. 天问一号火星探测器伞系减速分系统设计与验证[J]. 中国科学: 技术科学, 2022, 52 (2): 264- 277. |
| LI J , FANG G H , LYU Z H , et al. Design and verification of parachute deceleration subsystem of Tianwen-1 Mars probe[J]. Scientia Sinica Technologica, 2022, 52 (2): 264- 277. | |
| 13 | 董捷, 饶炜, 孙泽洲, 等. 火星伞降段多体动力学特性分析与安全设计研究[J]. 中国科学: 技术科学, 2022, 52 (8): 1175- 1185. |
| DONG J , RAO W , SUN Z Z , et al. Multibody dynamics characteristics analysis and safety design research of the Mars parachute descent process[J]. Scientia Sinica Technologica, 2022, 52 (8): 1175- 1185. | |
| 14 |
WHITE F M , WOLF D F . A theory of three-dimensional parachute dynamic stability[J]. Journal of Aircraft, 1968, 5 (1): 86- 92.
doi: 10.2514/3.43912 |
| 15 |
WOLF D F . Dynamic stability of a nonrigid parachute and payload system[J]. Journal of Aircraft, 1971, 8 (8): 603- 609.
doi: 10.2514/3.59145 |
| 16 |
DOHERR K F , SCHILLING H . Nine-degree-of-freedom simulation of rotating parachute systems[J]. Journal of Aircraft, 1992, 29 (5): 774- 781.
doi: 10.2514/3.46245 |
| 17 |
XING X J , FENG L , CHEN M P , et al. Modeling and research of a multi-stage parachute system for the booster recovery[J]. Proceedings of the Institution of Mechanical Engineers Part G: Journal of Aerospace Engineering, 2023, 237 (5): 1135- 1157.
doi: 10.1177/09544100221118238 |
| 18 | COCKRELL D J, DOHERR K F. Preliminary consideration of parameter identification analysis from parachute aerodynamic flight test data[R]. San Diego: AIAA, 1981. |
| 19 |
EATON J A . Added mass and the dynamics stability of parachutes[J]. Journal of Aircraft, 1982, 19 (5): 414- 416.
doi: 10.2514/3.44766 |
| 20 |
EATON J A . Added fluid mass and the equations of motion of a parachute[J]. Aeronautical Quarterly, 1983, 34 (3): 226- 242.
doi: 10.1017/S0001925900009720 |
| 21 | GINN J M, CLARK I G, BRAUN R D. Parachute dynamics stability and the effects of apparent inertial[R]. Atlanta: AIAA, 2014. |
| 22 | CAO Y H , WEI N . Flight trajectory simulation and aerodynamic parameter identification of large-scale parachute[J]. International Journal of Aerospace Engineering, 2020, 2020, 5603169. |
| 23 |
GAO X L , ZHANG Q B , TANG Q G . Parachute dynamics and perturbation analysis of precision airdrop system[J]. Chinese Journal of Aeronautics, 2016, 29 (3): 596- 607.
doi: 10.1016/j.cja.2016.04.003 |
| 24 |
PHAM T D , NGUYEN A T , LE V D , et al. Trajectory analyses of uncontrolled circular parachutes in random spatial wind fields[J]. Journal of Mechanical Science and Technology, 2022, 36 (8): 3825- 3835.
doi: 10.1007/s12206-022-0706-5 |
| 25 | DOBROKHODOV V, YAKIMENKO O, JUNGE C. Six-degree-of-freedom model of a controlled circular parachute[R]. Monterey: AIAA, 2002. |
| 26 |
FIELDS T D , LACOMBE J C , WANG E L . Autonomous guidance of a circular parachute using descent rate control[J]. Journal of Guidance, Control, and Dynamics, 2012, 35 (4): 1367- 1370.
doi: 10.2514/1.55919 |
| 27 | FIELDS T D, BASORE N. Reversible control line reefing system for circular parachutes[R]. Daytona Beach: AIAA, 2015. |
| 28 |
FIELDS T D . Evaluation of control line reefing systems for circular parachute[J]. Journal of Aircraft, 2016, 53 (3): 855- 859.
doi: 10.2514/1.C033524 |
| 29 | 钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000. |
| QIAN X F , LIN R X , ZHAO Y N . Missile flight dynamics[M]. Beijing: Beijing Institute of Technology Press, 2000. | |
| 30 |
HAN J Q . From PID to active disturbance rejection control[J]. IEEE Trans.on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 31 |
XIONG S F , WANG W H , LIU X D , et al. A novel extended state observer[J]. ISA Transactions, 2015, 58, 309- 317.
doi: 10.1016/j.isatra.2015.07.012 |
| 32 | UTKIN V I . Control systems of variable structure[M]. New York: Wiley, 1976. |
| 33 | 高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1996. |
| GAO W B . Theory and design method for variable sliding mode control[M]. Beijing: Science Press, 1996. | |
| 34 |
DING S H , MEI K Q , YU X H . Adaptive second-order sliding mode control: a Lyapunov approach[J]. IEEE Trans.on Automatic Control, 2022, 67 (10): 5392- 5399.
doi: 10.1109/TAC.2021.3115447 |
| 35 |
CAO X Q , GE Q X , ZHU J Q , et al. Improved sliding mode traction control combined sliding mode disturbance observer strategy for high-speed Maglev train[J]. IEEE Trans.on Power Electronics, 2023, 38 (1): 827- 838.
doi: 10.1109/TPEL.2022.3201614 |
| 36 |
HOU H Z , YU X H , FU Z . Sliding mode control of networked control systems: an auxiliary matrices-based approach[J]. IEEE Trans.on Automatic Control, 2022, 67 (7): 3574- 3581.
doi: 10.1109/TAC.2021.3103882 |
| 37 |
FENG Y , YU X H , MAN Z H . Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38 (12): 2159- 2167.
doi: 10.1016/S0005-1098(02)00147-4 |
| 38 | 梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38 (5): 552- 557. |
| MEI H , WANG Y . Fast convergent sliding mode variable structure control of robot[J]. Information and Control, 2009, 38 (5): 552- 557. |
| [1] | Qiushi ZHENG, Weichun XU, Minghan ZHAO, Naixing LI, Xuxin BAO. Research on roll control technology of trajectory correction fuse with active-canards [J]. Systems Engineering and Electronics, 2024, 46(4): 1412-1421. |
| [2] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [3] | Yali NIU, Jingwei XU, Guisheng LIAO, Qingyun KAN, Guangjun LIU. Clutter suppression approach for missile-borne HPRF radar with sum-difference antenna [J]. Systems Engineering and Electronics, 2023, 45(8): 2455-2462. |
| [4] | Yushi JIANG, Yang CHEN, Lu GAO, Ligen CAI, Jixing LYU. Predefined-time adaptive control for heavy-lift launch vehicles [J]. Systems Engineering and Electronics, 2023, 45(8): 2570-2577. |
| [5] | Leilei ZHANG, Xi LIU, Xulin LIU, Hongjun YANG, Feng ZHANG. Accelerated storage life assessment method under zero-failure data for electromechanical products of missile [J]. Systems Engineering and Electronics, 2023, 45(7): 2287-2294. |
| [6] | Wenfei ZHAO, Xiaolei LIU, Cuiling MA, Kenan TENG. DWTA of air defense for strategic location on the sea based on multi-objective fuzzy programming [J]. Systems Engineering and Electronics, 2023, 45(3): 777-784. |
| [7] | Jiancheng ZHENG, Zhiguo QU, Xiansi TAN, Jingyang WANG, Lujun LI. Comparison of early warning detection characteristics between anti-near-space and anti-missile [J]. Systems Engineering and Electronics, 2023, 45(2): 379-385. |
| [8] | Botao SONG, Guangliang XU. Missile trajectory prediction method based on LSTM and 1DCNN [J]. Systems Engineering and Electronics, 2023, 45(2): 504-512. |
| [9] | Xiaofeng XUE, Guangduo XU, Yunwen FENG, Jiaqi LIU, Tao GAO, Shixi GUO, Wei ZHANG. Design of temperature stepping enhancement test profile based on component derating design [J]. Systems Engineering and Electronics, 2023, 45(12): 4073-4083. |
| [10] | Yuan GUO, Zhiyong SUO, Tingting WANG, Zhiquan DING. Configuration parameter optimization design method of MBFL-SAR [J]. Systems Engineering and Electronics, 2023, 45(11): 3449-3454. |
| [11] | Xiaowen ZHU, Chengli FAN, Yingqi LU, Wenzheng ZHU, Xuan WU. Anti-missile weapon target allocation modeling and implementation based on improved BBO algorithm and fuzzy expectation effect [J]. Systems Engineering and Electronics, 2023, 45(11): 3544-3554. |
| [12] | Zichao LIU, Jiang WANG, Shaoming HE. Time and angle control guidance law based on deep learning [J]. Systems Engineering and Electronics, 2023, 45(11): 3579-3587. |
| [13] | Yuxin GAO, Chunsheng LIU. Differential game-based learning sliding mode guidance for non-affine missile system [J]. Systems Engineering and Electronics, 2023, 45(11): 3616-3623. |
| [14] | Ruining LUO, Shucai HUANG, Yan ZHAO, Zhen ZHANG. Guidance strategy of mother-son missile against unmanned aerial vehicle cluster [J]. Systems Engineering and Electronics, 2023, 45(10): 3249-3258. |
| [15] | Hengyi ZHAN, Yachao LI, Chunfeng WU, Xuan SONG, Tinghao ZHANG. Analytic-iterative positioning method for missile-borne bistatic forward-looking imaging radar [J]. Systems Engineering and Electronics, 2023, 45(1): 71-78. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||