Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (5): 1712-1723.doi: 10.12305/j.issn.1001-506X.2024.05.24
• Guidance, Navigation and Control • Previous Articles
A method of UAV motion control to optimize air-ground relay network
Cancan TAO, Rui ZHOU
- School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China
-
Received:2023-04-24Online:2024-04-30Published:2024-04-30 -
Contact:Cancan TAO
CLC Number:
Cite this article
Cancan TAO, Rui ZHOU. A method of UAV motion control to optimize air-ground relay network[J]. Systems Engineering and Electronics, 2024, 46(5): 1712-1723.
share this article
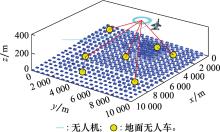
Fig.1
Illustration of air-ground relay communication scenario in urban environment"

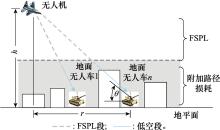
Fig.2
Illustration of relay unmanned aerial vehicle-ground unmanned vehicle signal transmission"

Fig.3
Flowchart of optimal unmanned aerial vehicle deployment and motion control for communications relay among a fleet of ground unmanned vehicles"

Table 1
Channel parameters in different areas"
| 信道参数 | 城市郊区 | 城区 | 高密度城区 | 高楼区 |
| α | 0.1 | 0.3 | 0.5 | 0.5 |
| β | 750 | 500 | 300 | 300 |
| γ | 8 | 5 | 20 | 50 |
| a | 5.018 8 | 9.610 1 | 11.948 0 | 27.156 2 |
| b | 0.351 1 | 0.159 2 | 0.135 9 | 0.122 8 |
| ηLoS/dB | 0.1 | 1.0 | 1.6 | 2.3 |
| ηNLoS/dB | 21 | 22 | 23 | 34 |
Table 2
Coverage of various types of areas"
| 环境区域 | 覆盖中心/m | 覆盖半径/m | |
| X | Y | ||
| 城市郊区 | 5 000 | 5 000 | 10 000 |
| 城区 | 6 500 | 4 500 | 3 500 |
| 高密度城区 | 7 000 | 3 500 | 2 000 |
| 高楼区 | 7 700 | 4 000 | 600 |
Table 3
Other simulation parameters"
| 参数 | 数值 |
| 无人机速度v0/(m/s) | 40 |
| 无人机飞行高度h/m | 400 |
| 转弯率约束(ωmin, ωmax)/(rad/s) | (-0.3, 0.3) |
| 最小转弯半径rmin/m | 133.3 |
| 地面无人车速度vg/(m/s) | 5 |
| 路径衰减因子λg | 5 |
| 放缩因子α | 10 |
| 基准信号强度S′t/dBm | -110 |
| 权重因子pc | 1e1 |
| 权重因子qc | 2 |
| 权重因子rω | 1e5 |
| 改进PSO的学习因子c1 | 3 |
| 改进PSO的学习因子c2 | 3 |
| 采样周期Ts/s | 0.5 |
| 滚动优化步数Nr | 5 |
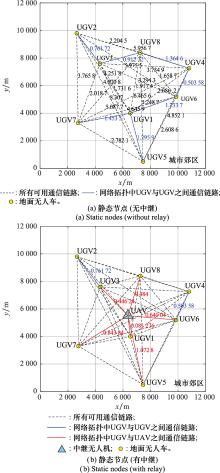
Fig.4
Optimal relay unmanned aerial vehicle deployment results and MST connection for stationary nodes"

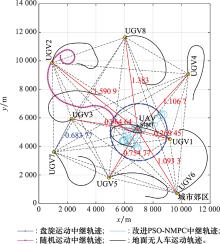
Fig.5
Optimal relay unmanned aerial vehicle motion control results and MST connection for mobile nodes"


Fig.6
Comparison of communication performance under three relay strategies"


Fig.7
Real time changes in communication topology under a complex environment"


Fig.8
Comparison of relay communication performance under different channel models"

| 1 | ALJEHANI M, INOUE M. Communication and autonomous control of multi-UAV system in disaster response tasks[C]//Proc. of the 11th KES International Conference on Agent and Multi-Agent Systems: Technology and Applications, 2017: 123-132. |
| 2 | XU G B , SHI Y J , SUN X Y , et al. Internet of things in marine environment monitoring: a review[J]. Sensors, 2019, 19 (7): 69- 89. |
| 3 | PARK J H, CHOI S C, AHN I Y, et al. Multiple UAVs-based surveillance and reconnaissance system utilizing IoT platform[C]//Proc. of the IEEE International Conference on Electronics, Information, and Communication, 2019. |
| 4 | HU J Y , NIU H L , CARRASCO J , et al. Fault-tolerant coope-rative navigation of networked UAV swarms for forest fire mo-nitoring[J]. Aerospace Science and Technology, 2022, 123 (6): 265- 276. |
| 5 | FU X W , BI H Y , GAO X G . Multi-UAVs cooperative localization algorithms with communication constraints[J]. Mathematical Problems in Engineering, 2017, 9 (3): 1943539. |
| 6 |
LI B , ZHAO S J , MIAO R Q , et al. A survey on unmanned aerial vehicle relaying networks[J]. IET Communications, 2021, 15 (10): 1262- 1272.
doi: 10.1049/cmu2.12107 |
| 7 |
MOZAFFARI M , SAAD W , BENNIS M , et al. Mobile unmanned aerial vehicles (UAVs) for energy-efficient internet of things communications[J]. IEEE Trans.on Wireless Communications, 2017, 16 (11): 7574- 7589.
doi: 10.1109/TWC.2017.2751045 |
| 8 | WON J , KIM D Y , PARK Y I , et al. A survey on UAV placement and trajectory optimization in communication networks: from the perspective of air-to-ground channel models[J]. ICT Express, 2022, 9 (3): 385- 397. |
| 9 |
ONO F , OCHIAI H , MIURA R . A wireless relay network based on unmanned aircraft system with rate optimization[J]. IEEE Trans.on Wireless Communications, 2016, 15 (11): 7699- 7708.
doi: 10.1109/TWC.2016.2606388 |
| 10 |
MOZAFFARI M , SAAD W , BENNIS M , et al. Mobile unmanned aerial vehicles (UAVs) for energy-efficient internet of things communications[J]. IEEE Trans.on Wireless Communications, 2017, 16 (11): 7574- 7589.
doi: 10.1109/TWC.2017.2751045 |
| 11 | KRIJESTORAC E, HANNA S, CABRIC D. Uav access point placement for connectivity to a user with unknown location using deep rl[C]//Proc. of the IEEE Globecom Workshops, 2019. |
| 12 |
ZENG Y , ZHANG R , LIM T J . Throughput maximization for UAV-enabled mobile relaying systems[J]. IEEE Trans.on Communications, 2016, 64 (12): 4983- 4996.
doi: 10.1109/TCOMM.2016.2611512 |
| 13 |
CHAMSEDDINE A , AKHRIF O , CHARLAND-ARCAND G , et al. Communication relay for multiground units with unmanned aerial vehicle using only signal strength and angle of arrival[J]. IEEE Trans.on Control Systems Technology, 2017, 25 (1): 286- 293.
doi: 10.1109/TCST.2016.2552461 |
| 14 |
WU G , GAO X , FU X W , et al. Mobility control of unmanned aerial vehicle as communication relay in airborne multi-user systems[J]. Chinese Journal of Aeronautics, 2019, 32 (6): 1520- 1529.
doi: 10.1016/j.cja.2019.02.010 |
| 15 | KIM S , OH H , SUK J , et al. Coordinated trajectory planning for efficient communication relay using multiple UAVs[J]. Control Engineering Practice, 2014, 29 (8): 42- 49. |
| 16 |
LUN Y B , YAO P , WANG Y X . Trajectory optimization of SUAV for marine vessels communication relay mission[J]. IEEE Systems Journal, 2020, 14 (4): 5014- 5024.
doi: 10.1109/JSYST.2020.2975565 |
| 17 | BOR-YALINIZ R I, EL-KEYI A, YANIKOMEROGLU H. Efficient 3-D placement of an aerial base station in next generation cellular networks[C]//Proc. of the IEEE International Conference on Communications, 2016. |
| 18 |
LADOSZ P , OH H , ZHENG G , et al. A hybrid approach of learning and model-based channel prediction for communication relay UAVs in dynamic urban environments[J]. IEEE Robotics and Automation Letters, 2019, 4 (3): 2370- 2377.
doi: 10.1109/LRA.2019.2903850 |
| 19 | WU G F , GAO X G , WAN K F . Mobility control of unmanned aerial vehicle as communication relay to optimize ground-to-air uplinks[J]. Sensors, 2020, 20 (8): 172- 194. |
| 20 |
POP P C . The generalized minimum spanning tree problem: an overview of formulations, solution procedures and latest advances[J]. European Journal of Operational Research, 2020, 283 (1): 1- 15.
doi: 10.1016/j.ejor.2019.05.017 |
| 21 | 吴高峰, 高晓光, 符小卫. 一种基于多无人机的中继节点布置问题建模与优化方法[J]. 航空学报, 2017, 38 (11): 241- 253. |
| WU G F , GAO X G , FU X W . A modeling and optimization method for relay node arrangement problem based on multiple UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38 (11): 236- 248. | |
| 22 | LADOSZ P, OH H, CHEN W H. Optimal positioning of communication relay unmanned aerial vehicles in urban environments[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2016: 1140-1147. |
| 23 | WU J F , WANG H L , LI N , et al. Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by adaptive grasshopper optimization algorithm[J]. Aerospace Science and Technology, 2017, 70 (3): 497- 510. |
| 24 |
WAN Y , NAMUDURI K , ZHOU Y , et al. A smooth-turn mobility model for airborne networks[J]. IEEE Trans.on Vehicular Technology, 2013, 62 (7): 3359- 3370.
doi: 10.1109/TVT.2013.2251686 |
| 25 | AL-HOURANI A, KANDEEPAN S, JAMALIPOUR A. Modeling air-to-ground path loss for low altitude platforms in urban environments[C]//Proc. of the IEEE Global Communications Conference, 2014: 2898-2904. |
| 26 |
AL-HOURANI A , KANDEEPAN S , LARDNER S . Optimal LAP altitude for maximum coverage[J]. IEEE Wireless Communications Letters, 2014, 3 (6): 569- 572.
doi: 10.1109/LWC.2014.2342736 |
| 27 |
CHENG X , HUANG Z W , CHEN S Z . Vehicular communication channel measurement, modelling, and application for beyond 5G and 6G[J]. IET Communications, 2020, 14 (19): 3303- 3311.
doi: 10.1049/iet-com.2020.0531 |
| 28 |
BITHAS P S , NIKOLAIDIS V , KANATAS A G , et al. UAV-to-ground communications: channel modeling and UAV selection[J]. IEEE Trans.on Communications, 2020, 68 (8): 5135- 5144.
doi: 10.1109/TCOMM.2020.2992040 |
| 29 | MUSLIMOV T Z , MUNASYPOV R A . Multi-UAV cooperative target tracking via consensus-based guidance vector fields and fuzzy MRAC[J]. Aircraft Engineering and Aerospace Technology, 2021, 93 (7): 1204- 1212. |
| 30 | GUANG Z , BI X Z , ZHAO H Y , et al. Non-cooperative maneuvering spacecraft tracking via a variable structure estimator[J]. Aerospace Science and Technology, 2018, 79 (4): 352- 363. |
| 31 | 宋敏, 戴静, 孔韬. 基于NMPC的无人机自主防撞控制方法[J]. 系统工程与电子技术, 2019, 41 (9): 2092- 2099. |
| SONG M , DAI J , KONG T . Autonomous collision avoidance control method for UAV based on NMPC[J]. Systems Engineering and Electronics, 2019, 41 (9): 2092- 2099. |
| [1] | Xiaochen ZHAO, Dongtao ZHAO, Hang YUAN, Huan WANG, Qun ZHANG. Micro-motion parameters extraction for UAV under LPRF condition [J]. Systems Engineering and Electronics, 2024, 46(5): 1503-1513. |
| [2] | Wenhao BI, Mengqi ZHANG, Fei GAO, Mi YANG, An ZHANG. Review on UAV swarm task allocation technology [J]. Systems Engineering and Electronics, 2024, 46(3): 922-934. |
| [3] | Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(3): 942-952. |
| [4] | Cheng GAO, Yanli DU, Yunong BU, Yanbin LIU, Yufei WANG. Heterogeneous UAV swarm grouping deployment for complex multiple tasks [J]. Systems Engineering and Electronics, 2024, 46(3): 972-981. |
| [5] | Wenkang HAO, Qifeng CHEN. Distributed model predictive energy-saving control of UAVs formation with fuzzy constraints [J]. Systems Engineering and Electronics, 2024, 46(3): 1021-1030. |
| [6] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [7] | Liguan PEI, Wei ZHOU, Jingdong LIU. Research on arrangement method of motorized chaff screen based on cuckoo bird search algorithm [J]. Systems Engineering and Electronics, 2024, 46(3): 814-823. |
| [8] | Shihao LIU, Yangchao HUANG, Hang HU, Jiangbo SI, Huizhu HAN, Qi AN. Joint optimization of task offloading and resource allocation for UAV swarm-assisted edge computing systems [J]. Systems Engineering and Electronics, 2024, 46(2): 751-760. |
| [9] | Yong YANG, Xuesong WANG. Analysis of radar detection performance for UAV based on clutter tail distribution [J]. Systems Engineering and Electronics, 2024, 46(1): 113-120. |
| [10] | Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU. Destination prediction of UAV cluster trajectory based on EMD-DESN [J]. Systems Engineering and Electronics, 2024, 46(1): 290-299. |
| [11] | Yu MO, Xudong TANG. Research on mechanical resonance suppression of electric servo system based on an improved ADRC [J]. Systems Engineering and Electronics, 2024, 46(1): 309-317. |
| [12] | Zhongbao WANG, Kuiying YIN. Block effect suppression method of UAV-borne SAR image based on joint domain filtering [J]. Systems Engineering and Electronics, 2023, 45(9): 2768-2776. |
| [13] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [14] | Yufeng LIANG, Jingchao ZHAO, Wangkui LIU, Lei WANG, Shipeng WANG, Shilong RUAN. Air combat guidance method based on top rolling optimization and bottom tracking [J]. Systems Engineering and Electronics, 2023, 45(9): 2866-2872. |
| [15] | Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation [J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||