Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (10): 3008-3015.doi: 10.12305/j.issn.1001-506X.2023.10.02
• Electronic Technology • Previous Articles
Online fast localization method of UAVs based on heterologous image matching
Haigang SUI, Jiajie LI, Guohua GOU
- State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430072, China
-
Received:2022-09-06Online:2023-09-25Published:2023-10-11 -
Contact:Haigang SUI
CLC Number:
Cite this article
Haigang SUI, Jiajie LI, Guohua GOU. Online fast localization method of UAVs based on heterologous image matching[J]. Systems Engineering and Electronics, 2023, 45(10): 3008-3015.
share this article
Fig.1
Procedure of image matching localization method"
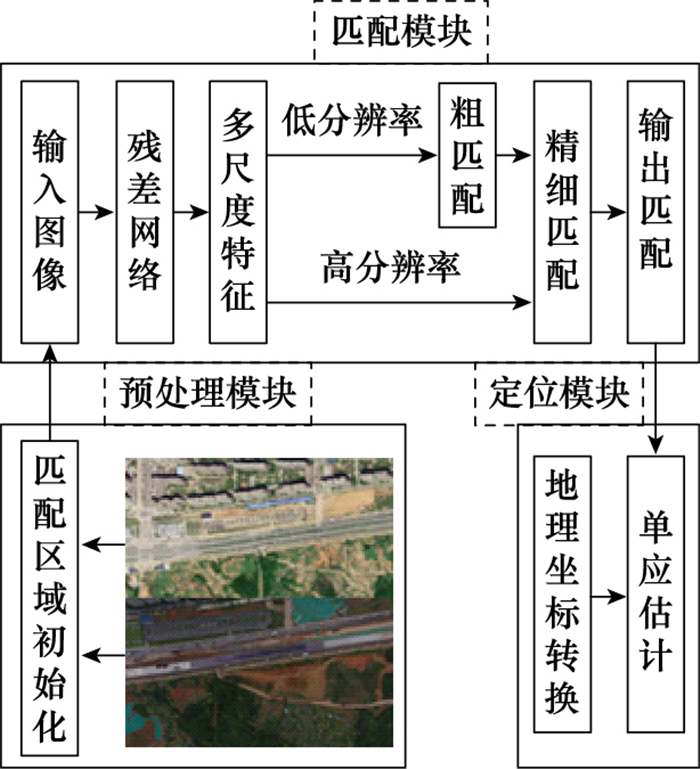

Fig.2
Framework of feature extraction network"
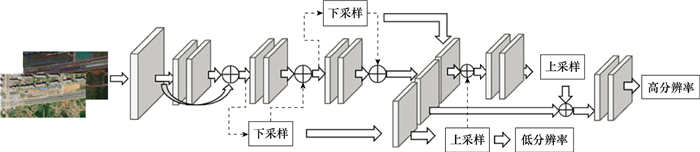
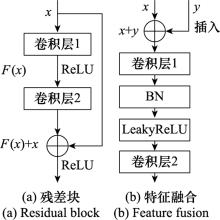
Fig.3
Logical composition of residual block and feature fusion module"
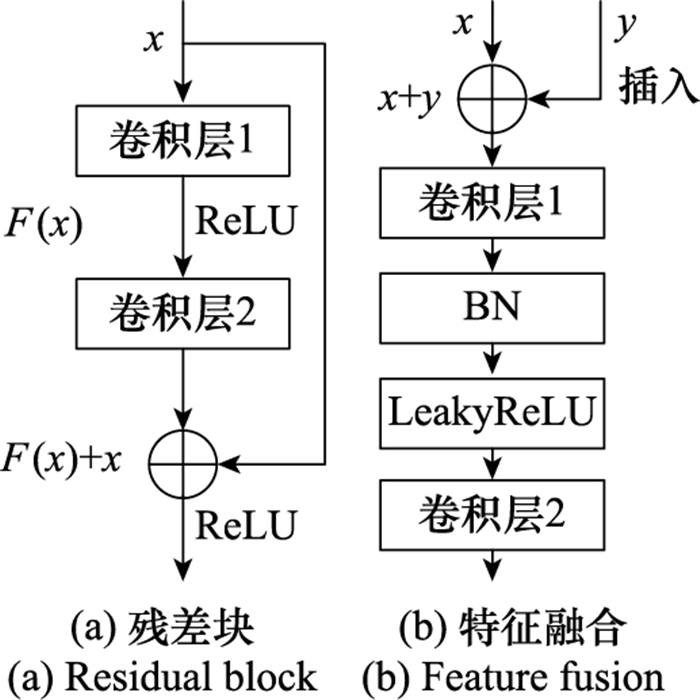
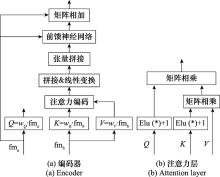
Fig.4
Logic composition of encoder and attention layer"
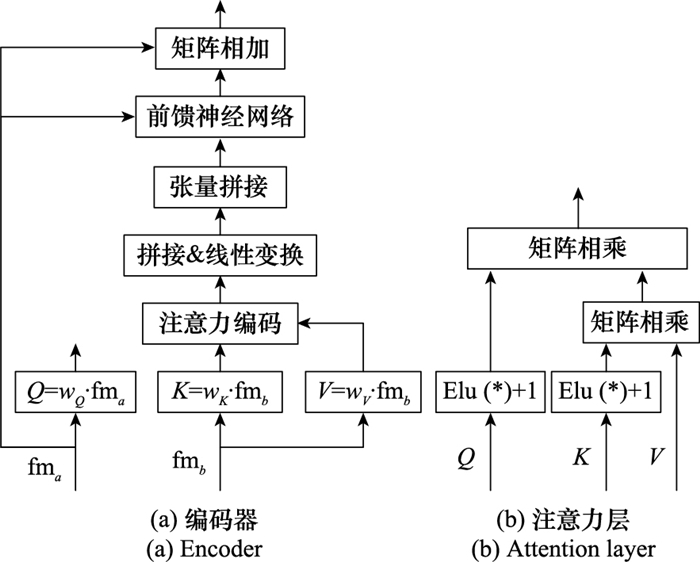

Fig.5
Structure of minimum Euclidean distance matching module"
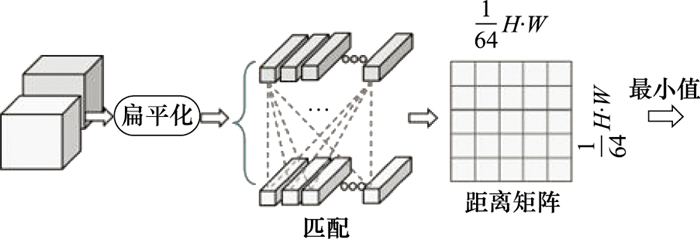
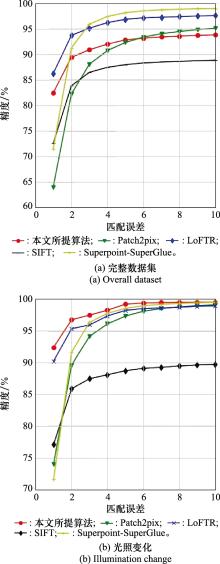
Fig.6
Matching point accuracy test"
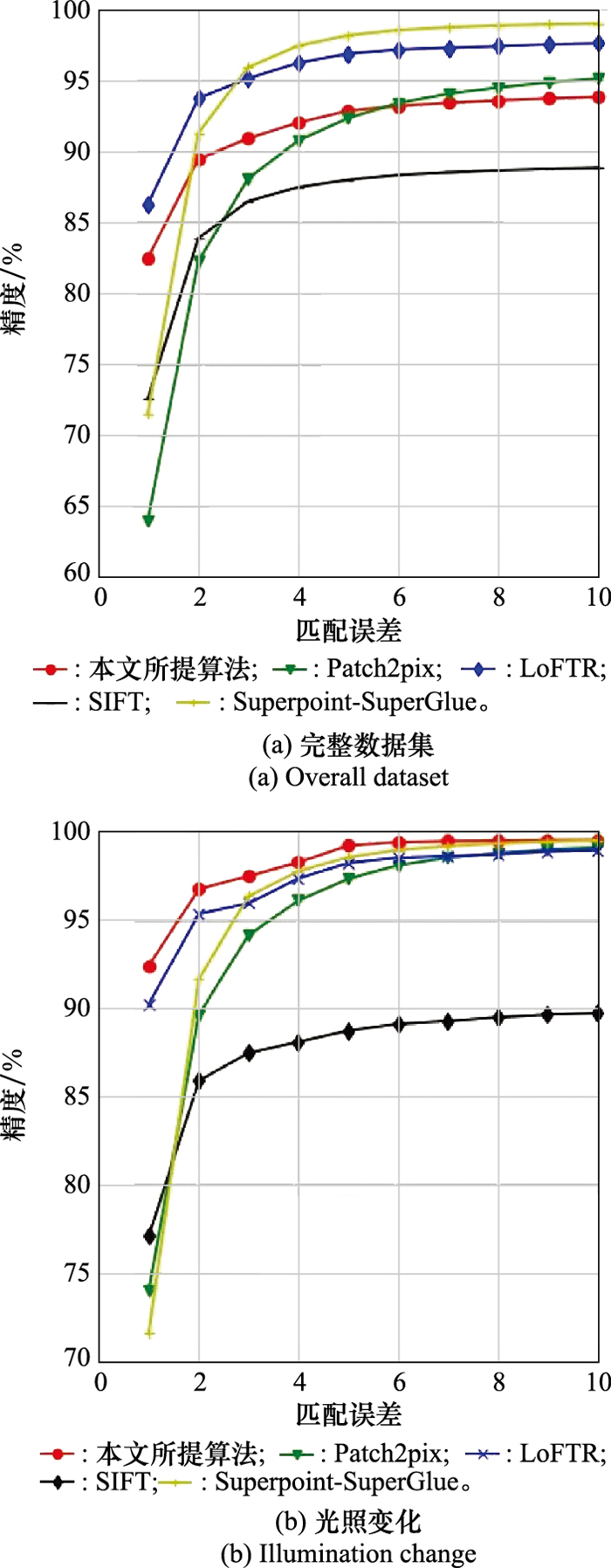
Table 1
Number of matching points"
| 方法 | 匹配点数量 |
| LoFTR | 2 937 |
| SuperGlue | 503 |
| Patch2Pix | 1 347 |
| SIFT | 610 |
| 本文所提算法 | 3 139 |
Table 2
Homography matrix precision evaluation"
| 方法 | 1像素 | 3像素 | 5像素 |
| LoFTR | 58.8(67.8) | 80.2(86.4) | 85.9(90.9) |
| SuperGlue | 43.8(55.6) | 76.5(87.4) | 84.6(93.4) |
| Patch2pix | 34.9(50.7) | 67.0(82.2) | 78.5(89.9) |
| SIFT | 35.9(44.1) | 61.5(72.0) | 71.0(83.2) |
| 本文所提算法 | 52.6(80.1) | 71.6(91.3) | 81.1(95.5) |

Fig.7
Localization test results"
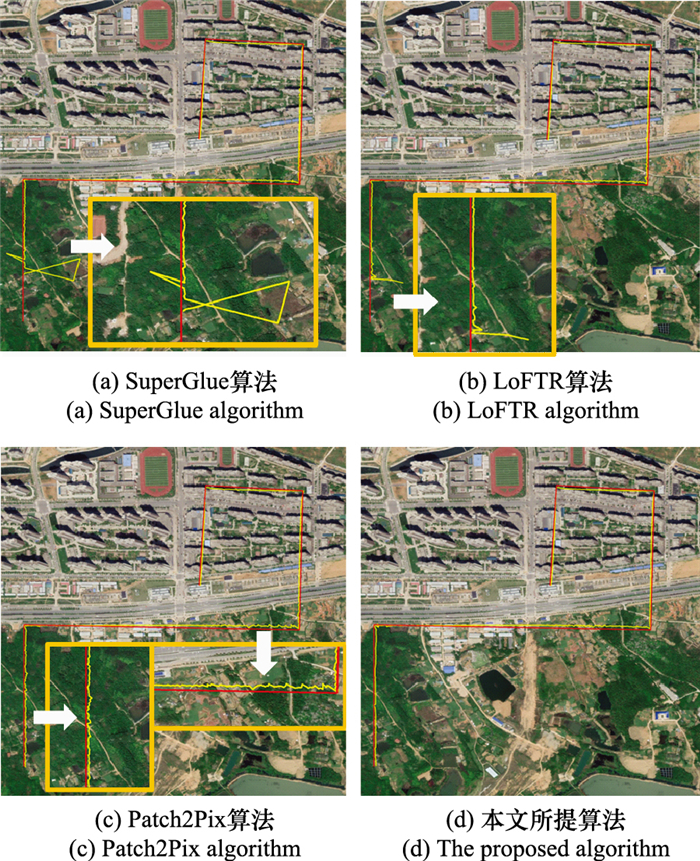
Table 3
Localization accuracy"
| 方法 | 平均误差/m | 最大误差/m | 匹配个数 |
| LoFTR/m | 2.92 | 10.05 | 870/910 |
| SuperGlue/m | 3.04 | 10.32 | 850/910 |
| Patch2Pix/m | 2.95 | 10.59 | 910/910 |
| Proposed/m | 2.86 | 10.04 | 910/910 |
Table 4
Algorithm efficiency s"
| 方法 | 时间 |
| LoFTR | 1.6 |
| SuperGlue | 1.0 |
| Patch2Pix | 2.3 |
| 本文所提算法 | 1.0 |
| 1 |
GYAGENDA N , HATILIMA J V , ROTH H , et al. A review of GNSS-independent UAV navigation techniques[J]. Robotics and Autonomous Systems, 2022, 152, 104069.
doi: 10.1016/j.robot.2022.104069 |
| 2 |
REZWAN S , CHOI W . Artificial intelligence approaches for UAV navigation: recent advances and future challenges[J]. IEEE Access, 2022, 10, 26320- 26339.
doi: 10.1109/ACCESS.2022.3157626 |
| 3 |
COUTURIER A , AKHLOUFI M A . A review on absolute vi-sual localization for UAV[J]. Robotics and Autonomous Systems, 2021, 135, 103666.
doi: 10.1016/j.robot.2020.103666 |
| 4 |
KAZEROUNI I A , FITZGERALD L , DOOLY G , et al. A survey of state-of-the-art on visual SLAM[J]. Expert Systems with Applications, 2022, 205, 117734.
doi: 10.1016/j.eswa.2022.117734 |
| 5 |
JIA G W , LI X Y , ZHANG D M , et al. Visual-SLAM classical framework and key techniques: a review[J]. Sensors, 2022, 22 (12): 4582.
doi: 10.3390/s22124582 |
| 6 | SHAN M, WANG F, LIN F, et al. Google map aided visual navigation for UAVs in GPS-denied environment[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2015: 114-119. |
| 7 |
COUTURIER A , AKHLOUFI M A . A review on absolute vi-sual localization for UAV[J]. Robotics and Autonomous Systems, 2021, 135, 103666.
doi: 10.1016/j.robot.2020.103666 |
| 8 |
AL SAID N , GORBACHEV Y , AVDEENKO A . An unmanned aerial vehicles navigation system on the basis of pattern recognition applications—review of implementation options and prospects for development[J]. Software: Practice and Experience, 2021, 51 (7): 1509- 1517.
doi: 10.1002/spe.2964 |
| 9 |
MUGHAL M H , KHOKHAR M J , SHAHZAD M . Assisting UAV localization via deep contextual image matching[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14, 2445- 2457.
doi: 10.1109/JSTARS.2021.3054832 |
| 10 |
MA J Y , JIANG X Y , FAN A X , et al. Image matching from handcrafted to deep features: a survey[J]. International Journal of Computer Vision, 2021, 129 (1): 23- 79.
doi: 10.1007/s11263-020-01359-2 |
| 11 |
CHEN L , ROTTENSTEINER F , HEIPKE C . Feature detection and description for image matching: from hand-crafted design to deep learning[J]. Geo-spatial Information Science, 2021, 24 (1): 58- 74.
doi: 10.1080/10095020.2020.1843376 |
| 12 | 陈世伟, 夏海, 杨小冈, 等. 基于风格迁移不变特征的SAR与光学图像配准算法[J]. 系统工程与电子技术, 2022, 44 (5): 1536- 1542. |
| CHEN S W , XIA H , YANG X G , et al. SAR and optical image registration algorithm based on style transfer invariable fea-tures[J]. Systems Engineering and Electronics, 2022, 44 (5): 1536- 1542. | |
| 13 | YANG W , XU C , MEI L Y , et al. LPSO: multi-source image matching considering the description of local phase sharpness orientation[J]. IEEE Photonics Journal, 2022, 14 (1): 1- 9. |
| 14 | SARLIN P E, DETONE D, MALISIEWICZ T, et al. SuperGlue: learning feature matching with graph neural networks[C]// Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 4938-4947. |
| 15 | ROCCO I , CIMPOI M , ARANDJELOVIC R , et al. Ncnet: neighbourhood consensus networks for estimating image corres- pondences[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2020, 44 (2): 1020- 1034. |
| 16 | EFE U, INCE K G, ALATAN A. Dfm: a performance baseline for deep feature matching[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 4284-4293. |
| 17 | ONO Y, TRULLS E, FUA P, et al. LF-Net: learning local features from images[C]//Proc. of the 32nd International Conference on Neural Information Processing Systems, 2018: 6237-6247. |
| 18 | DUSMANU M, ROCCO I, PAJDLA T, et al. D2-net: a trainable CNN for joint description and detection of local features[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 8092-8101. |
| 19 | CHEN H K, LUO Z X, ZHANG J H, et al. Learning to match features with seeded graph matching network[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 6301-6310. |
| 20 | REVAUD J, LEROY V, WEINZAEPFEL P, et al. PUMP: pyramidal and uniqueness matching priors for unsupervised learning of local descriptors[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 3926-3936. |
| 21 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proc. of the 31st International Conferenceon Neural Information Processing Systems, 2017: 6000-6010. |
| 22 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]//Proc. of the IEEE/CVF Confe- rence on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 23 | 韩子硕, 王春平, 付强, 等. 基于超密集特征金字塔网络的SAR图像舰船检测[J]. 系统工程与电子技术, 2020, 42 (10): 2214- 2222. |
| HAN Z S , WANG C P , FU Q , et al. Ship detection in SAR images based on super dense feature pyramid networks[J]. Systems Engineering and Electronics, 2020, 42 (10): 2214- 2222. | |
| 24 | KATHAROPOULOS A, VYAS A, PAPPAS N, et al. Transformers are RNNs: fast autoregressive transformers with linear attention[C]//Proc. of the International Conference on Machine Learning, 2020, 119: 5156-5165. |
| 25 | NIBALI A, HE Z, MORGAN S, et al. Numerical coordinate regression with convolutional neural networks[EB/OL]. [2022-09-06]. https://arxiv.org/abs/1801.07372v2. |
| 26 | LI Z Q, SNAVELY N. Megadepth: learning single-view depth prediction from internet photos[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018: 2041-2050. |
| 27 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]//Proc. of the IEEE International Conference on Computer Vision, 2017: 2980-2988. |
| 28 |
FISCHLER M A , BOLLES R C . Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24 (6): 381- 395.
doi: 10.1145/358669.358692 |
| 29 | BALNTAS V, LENC K, VEDALDI A, et al. HPatches: a benchmark and evaluation of handcrafted and learned local descriptors[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2017: 5173-5182. |
| 30 |
LOWE D G . Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60 (2): 91- 110.
doi: 10.1023/B:VISI.0000029664.99615.94 |
| 31 | DETONE D, MALISIEWICZ T, RABINOVICH A. Superpoint: self-supervised interest point detection and description[C]// Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2018: 224-236. |
| 32 | SUN J M, SHEN Z H, WANG Y, et al. LoFTR: detector-free local feature matching with transformers[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 8922-8931. |
| 33 | ZHOU Q J, SATTLER T, LEAL-TAIXE L. Patch2pix: epipolar-guided pixel-level correspondences[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 4669-4678. |
| [1] | Zhongbao WANG, Kuiying YIN. Block effect suppression method of UAV-borne SAR image based on joint domain filtering [J]. Systems Engineering and Electronics, 2023, 45(9): 2768-2776. |
| [2] | Honghai ZHANG, Zhenping REN, Ouge FENG, Fei WANG, Hao LIU. Logistics unmanned aerial vehicle flight plan pre-allocation in urban low-altitude airspace [J]. Systems Engineering and Electronics, 2023, 45(9): 2802-2811. |
| [3] | Yufeng LIANG, Jingchao ZHAO, Wangkui LIU, Lei WANG, Shipeng WANG, Shilong RUAN. Air combat guidance method based on top rolling optimization and bottom tracking [J]. Systems Engineering and Electronics, 2023, 45(9): 2866-2872. |
| [4] | Huizhu HAN, Yangchao HUANG, Hang HU, Qi AN, Shihao LIU. Energy-spectrum efficiency trade-off optimization based on short packet transmission in UAV communication [J]. Systems Engineering and Electronics, 2023, 45(9): 2956-2964. |
| [5] | Xiaogang QI, Yutong ZHOU, Lifang LIU. Evaluation of the reliability of UAV swarm for ground combat missions [J]. Systems Engineering and Electronics, 2023, 45(9): 2971-2978. |
| [6] | Zichang LIU, Yongsheng BAI, Siyu LI, Xisheng JIA. Diesel engine fault diagnosis method based on wavelet time-frequency diagram and Swin Transformer [J]. Systems Engineering and Electronics, 2023, 45(9): 2986-2998. |
| [7] | Lei SHENG, Manhong SHI, Yingchuan QI, Hao LI, Mingjun PANG. Dynamic offense and defense of UAV swarm based on situation evolution game [J]. Systems Engineering and Electronics, 2023, 45(8): 2332-2342. |
| [8] | Tong XU, Yazhou CHEN, Yuming WANG, Min ZHAO. Research on wideband white noise electromagnetic interference effect of UAV data link [J]. Systems Engineering and Electronics, 2023, 45(7): 1965-1973. |
| [9] | Xiaocao YANG, Yanli DU, Yunong BU, Yanbin LIU, Cheng GAO. Online three-dimensional RRT* cooperative route planning based on hierarchical decomposition [J]. Systems Engineering and Electronics, 2023, 45(5): 1409-1419. |
| [10] | Yang PANG, Ming WANG, Ziyi YAN, Tongyao YUE, Zhe ZHOU. UAV localization method with multi-view fusion [J]. Systems Engineering and Electronics, 2023, 45(4): 1127-1133. |
| [11] | Kun FANG, Xiaohui LI, Tao FAN. High-precision positioning algorithm for UAV based on random forest weight compensation [J]. Systems Engineering and Electronics, 2023, 45(1): 202-209. |
| [12] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [13] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [14] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [15] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||