Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (7): 2203-2210.doi: 10.12305/j.issn.1001-506X.2023.07.31
• Guidance, Navigation and Control • Previous Articles Next Articles
Optimization method of pixel pose location based on multi-scale features
Siqiang DONG, Nianmao DENG, Yan LIU
- Beijing Institute of Control and Electronic Technology, Beijing 100038, China
-
Received:2022-02-18Online:2023-06-30Published:2023-07-11 -
Contact:Siqiang DONG
CLC Number:
Cite this article
Siqiang DONG, Nianmao DENG, Yan LIU. Optimization method of pixel pose location based on multi-scale features[J]. Systems Engineering and Electronics, 2023, 45(7): 2203-2210.
share this article

Fig.1
System architecture diagram"

Fig.2
Multi-scale feature map extraction network"
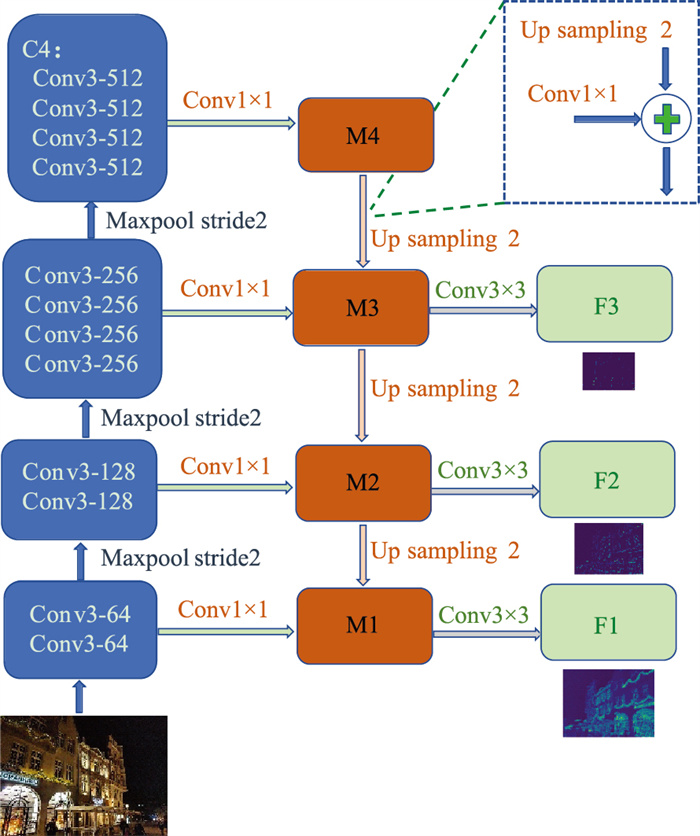

Fig.3
W matrix learning network"
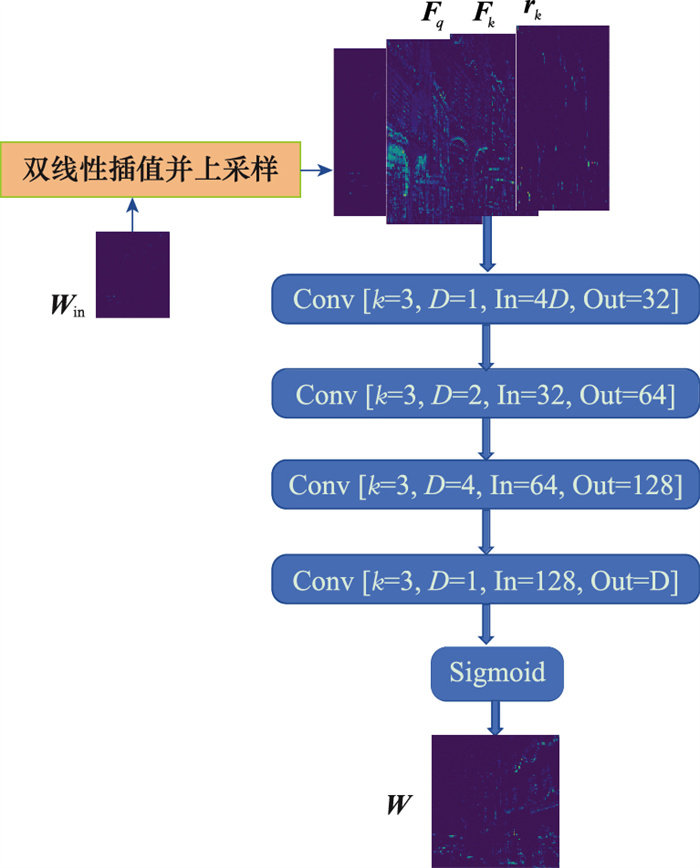

Fig.4
Heat effect drawing of W matrix"
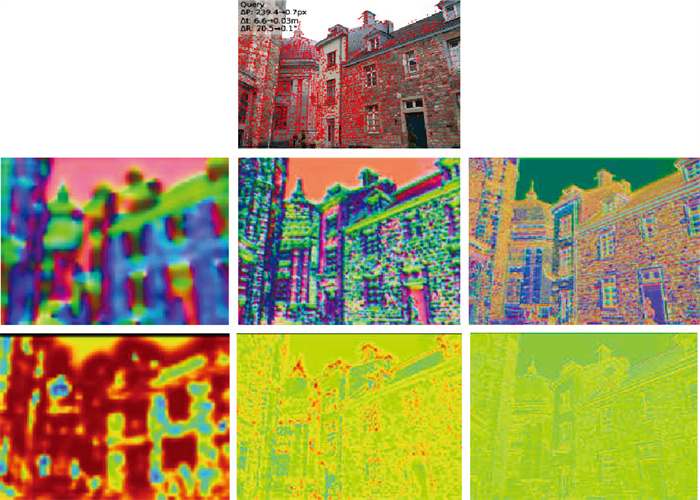

Fig.5
λ parameter learning network"
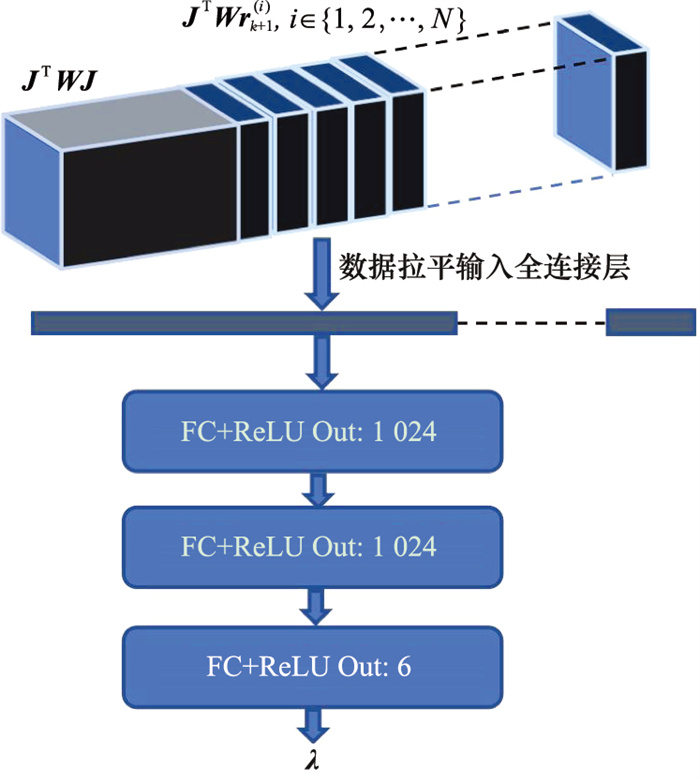

Fig.6
Pose optimization effect diagram"

Table 1
Visual localization on the Cambridge Landmarks datasets cm/(°)"
| 算法 | Court | King’s College | Hospital | Shop | St. Mary’s |
| Dense VLAD | - | 280/5.70 | 401/7.10 | 111/7.60 | 231/8.00 |
| PoseNet | - | 192/2.70 | 231/2.69 | 146/4.04 | 265/424 |
| Active Search | 24/0.13 | 13/0.22 | 20/0.36 | 4/0.21 | 8/0.25 |
| InLoc | - | - | - | - | - |
| Hloc | 16/0.11 | 12/0.20 | 15/0.30 | 4/0.20 | 7/0.21 |
| SANet | 328/1.95 | 32/0.54 | 32/0.53 | 10/0.47 | 16/0.57 |
| 本文方法 | 26/0.12 | 14/0.14 | 16/0.31 | 5/0.23 | 10/0.34 |
Table 2
Visual localization on the 7Scenes datasets cm/(°)"
| 算法 | Chees | Fire | Heads | Office | Pumpkin | Kitchen | Stairs |
| Dense VLAD | 21/12.50 | 33/13.80 | 15/14.90 | 28/11.20 | 31/11.30 | 30/12.30 | 25/15.80 |
| PoseNet | 32/4.06 | 47/7.33 | 29/6.09 | 48/3.84 | 47/4.21 | 59/4.32 | 47/6.93 |
| Active Search | 3/0.87 | 2/1.01 | 1/0.82 | 4/1.15 | 7/1.69 | 5/1.72 | 4/1.01 |
| InLoc | 3/1.05 | 3/1.07 | 2/1.16 | 3/1.05 | 5/1.55 | 4/1.31 | 9/2.47 |
| Hloc | 2/0.85 | 2/0.94 | 1/0.75 | 3/0.92 | 5/1.30 | 4/1.40 | 5/1.47 |
| SANet | 3/0.88 | 3/1.08 | 2/1.48 | 3/1.00 | 5/1.32 | 4/1.40 | 16/4.59 |
| 本文方法 | 2/0.80 | 2/0.73 | 1/0.78 | 3/0.80 | 4/1.13 | 3/1.20 | 5/1.08 |
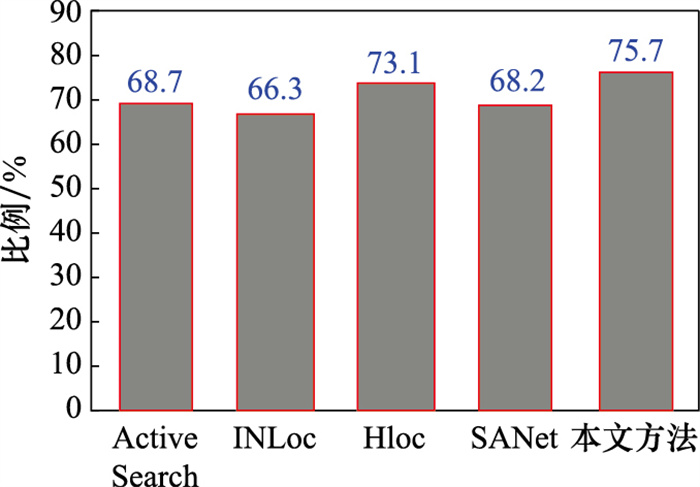
Fig.7
Statistical diagram of high-precision pose data"
| 1 | ERIC B , CARSTEN R . Visual camera re-localization from RGB and RGB-D images using DSAC[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2022, 44 (9): 5847- 5865. |
| 2 | CAVALLARI T, BERTINETTO L, MUKHOTI J, et al. Let's take this online: adapting scene coordinate regression network predictions for online RGB-D camera relocalization[C]//Proc. of the IEEE International Conference on 3D Vision (3DV), 2019: 564-573. |
| 3 |
TOFT C , MADDERN W , TORII A , et al. Long-term visual localization revisited[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2022, 44 (4): 2074- 2088.
doi: 10.1109/TPAMI.2020.3032010 |
| 4 |
LINUS S , OLOF E , FREDRIK K , et al. City-scale localization for cameras with known vertical direction[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2017, 39 (7): 1455- 1461.
doi: 10.1109/TPAMI.2016.2598331 |
| 5 |
LYNEN S , ZEISL B , AIGER D , et al. Large-scale: real-time visual-inertial localization revisited[J]. International Journal of Robotics Research, 2020, 39 (9): 1061- 1084.
doi: 10.1177/0278364920931151 |
| 6 |
CHUM O , JIRI M . Optimal randomized RANSAC[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2008, 30 (8): 1472- 1482.
doi: 10.1109/TPAMI.2007.70787 |
| 7 | BARATH D, MATAS J, NOSKOVA J. Magsac: marginalizing sample consensus[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2019. |
| 8 | ALBL C, KUKELOVA Z, PAJDLA T. Rolling shutter absolute pose problem with known vertical direction[C]//Proc. of the IEEE Computer Vision and Pattern Recognition, 2016: 3355-3363. |
| 9 | BHOWMIK A, GUMHOLD S, ROTHER C, et al. Reinforced feature points: optimizing feature detection and description for a high-level task[C]//Proc. of the IEEE Computer Society Confe- rence on Computer Vision and Pattern Recognition, 2020: 4947- 4956. |
| 10 | DUSMANU M, ROCCO I, PAJDLA T, et al. D2-Net: a trainable CNN for joint detection and description of local features[EB/OL]. [2022-01-18]. https://arxiv.org/abs/1905.03561. |
| 11 | PAUTRAT R, LARSSON V, OSWALD M R, et al. Online invariance selection for local feature descriptors[C]//Proc. of the IEEE European Conference on Computer Vision, 2020. |
| 12 | DETONE D, MALISIEWICZ T, RABINOVICH A. SuperPoint: self-supervised interest point detection and description[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2018. |
| 13 | SARLIN P E, DETONE D, MALISIEWICZ T, et al. SuperGlue: learning feature matching with graph neural networks[C]//Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2020: 4937-4946. |
| 14 | KENDALL A, CIPOLLA R. Geometric loss functions for camera pose regression with deep learning[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6555-6564. |
| 15 | DING M Y, WANG Z, SUN J, et al. CamNet: coarse-to-fine retrieval for camera relocalization[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2019. |
| 16 | 董思强, 邓年茂. 基于几何约束孪生卷积网络的相机6DOF定位研究[J]. 系统工程与电子技术, 2023, 45 (6): 1828- 1835. |
| DONG S Q , DENG N M . 6DOF camera location research based on geometric constraint siamese convolution network[J]. Systems Engineering and Electronics, 2023, 45 (6): 1828- 1835. | |
| 17 | BRACHMANNN E, ROTHER C. Expert sample consensus applied to camera re-localization[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2019. |
| 18 | BRACHMANNN E, KRULL A, NOWOZIN S, et al. DSAC-differentiable RANSAC for camera localization[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017. |
| 19 | SATTLER T, ZHOU Q, POLLEFEYS M, et al. Understanding the limitations of CNN-based absolute camera pose regre-ssion[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019. |
| 20 | ZHOU Q, SATTLER T, POLLEFEYS M, et al. To learn or not to learn: visual localization from essential matrices[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020. |
| 21 | CAVALLARI T, GOLODETZ S, LORD N A, et al. On-the-fly adaptation of regression forests for online camera relocalization[C]//Proc. of the IEEE Computer Vision and Pattern Re-cognition, 2017: 218-227. |
| 22 |
ENGEL J , KOLTUN V , CREMERS D . Direct sparse odometry[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence,, 2018, 40 (3): 611- 625.
doi: 10.1109/TPAMI.2017.2658577 |
| 23 | CZARNOWSKI J, LEUTENEGGER S, DAVISON A J. Semantic texture for robust dense tracking[C]//Proc. of the IEEE International Conference on Computer Vision Workshop, 2017. |
| 24 | ENGEL J, SCHOPS T, CREMERS D. LSD-SLAM: large-scale direct monocular SLAM[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2015. |
| 25 |
TORII A , ARANDJELOVIC R , SIVIC J , et al. Place recognition by view synthesis[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2018, 40 (2): 257- 271.
doi: 10.1109/TPAMI.2017.2667665 |
| 26 | KENDALL A, GRIMES M, CIPOLLA R. PoseNet: a convolutional network for real-time 6-DoF camera relocalization[C]//Proc. of the IEEE International Conference on Computer Vision, 2015: 2938-2946. |
| 27 | LIN T Y, DOLLAR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 936-944. |
| 28 | SHOTTON J, GLOCKER B, ZACH C, et al. Scene coordinate regression forests for camera relocalization in RGB-D images[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Re-cognition, 2013. |
| 29 |
SATTLER T , LEIBE B , KOBBELT L . Efficient & effective prioritized matching for large-scale image-based localization[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2017, 39 (9): 1744- 1756.
doi: 10.1109/TPAMI.2016.2611662 |
| 30 |
LOWE D G . Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60 (2): 91- 110.
doi: 10.1023/B:VISI.0000029664.99615.94 |
| 31 |
TAIRA H , OKUTOMI M , SATTLER T , et al. InLoc: indoor visual localization with dense matching and view synthesis[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2021, 43 (4): 1293- 1307.
doi: 10.1109/TPAMI.2019.2952114 |
| 32 | SARLIN P E, CADENA C, SIEGWART R, et al. From coarse to fine: robust hierarchical localization at large scale[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019. |
| 33 | YANG L W, BAI Z Q, TANG C Z, et al. SANet: scene agnostic network for camera localization[C]//Proc. of the International Conference on Computer Vision, 2019. |
| [1] | Fan YANG, Ping MA, Wei LI, Ming YANG. Intelligent ranking evaluation method of simulation models based on siamese network [J]. Systems Engineering and Electronics, 2023, 45(7): 2060-2068. |
| [2] | Jingrong SUN, Zhezhe CHEN, Linchang XIE, Mengxin DU, Shibin SONG. Haze removal algorithm based on image sky region segmentation [J]. Systems Engineering and Electronics, 2023, 45(6): 1606-1615. |
| [3] | Qian CHENG, Jia LI, Juan DU. Ship target detection algorithm of optical remote sensing image based on YOLOv5 [J]. Systems Engineering and Electronics, 2023, 45(5): 1270-1276. |
| [4] | Xin GUAN, Jiaen GUO, Xiao YI. Ship target recognition based on low rank bilinear pooling attention network [J]. Systems Engineering and Electronics, 2023, 45(5): 1305-1314. |
| [5] | Li CHEN, Zihan FANG, Liquan MEI. DSS signal generation algorithm based on GAN [J]. Systems Engineering and Electronics, 2023, 45(5): 1544-1552. |
| [6] | Weiguang FANG, Zhaowei NIE, Chenning LIU, Hao LI, Yang NA, Huixiong WANG, Dongpao HONG. Research on digital twin driven intelligent weaponry support technology [J]. Systems Engineering and Electronics, 2023, 45(4): 1247-1260. |
| [7] | Dongdong ZHANG, Chunping WANG, Qiang FU. Ship target detection in SAR image based on feature-enhanced network [J]. Systems Engineering and Electronics, 2023, 45(4): 1032-1039. |
| [8] | Shihui WU, Yu ZHOU, Zhengxin LI, Xiaodong LIU, Bo HE. Approach to simulation optimization of time-varying parameters system based on neural network [J]. Systems Engineering and Electronics, 2023, 45(2): 472-480. |
| [9] | Lei AN, Zhaorui LI, Bing JI. Non-myopic scheduling method for mobile active/passive sensor in clutter environment [J]. Systems Engineering and Electronics, 2023, 45(1): 165-174. |
| [10] | Tongxin LI, Weiping WANG, Tao WANG, Xiaobo LI. Strategic agent BDI model based on knowledge graph [J]. Systems Engineering and Electronics, 2023, 45(1): 119-126. |
| [11] | Bowen YU, Lin YU, Ming LYU, Jie ZHANG. Target threat assessment model based on M-ANFIS-PNN [J]. Systems Engineering and Electronics, 2022, 44(10): 3155-3163. |
| [12] | Wei ZHANG, Jing HE, Xiaowei XIE, Guoqiang ZHAO, Zhen CHEN. Design and implementation of simulation evaluation system for joint battlefield navigation countermeasure [J]. Systems Engineering and Electronics, 2022, 44(10): 3182-3189. |
| [13] | Yifei XU, Xiaodong LI, Xinde LI. A method of camouflaged object segmentation with locating and asymmetric compensation [J]. Systems Engineering and Electronics, 2022, 44(9): 2707-2715. |
| [14] | Haojun FENG, Li DUAN, Biying ZHANG, Haichao LIU. Bidirectional cyclic evolutionary framework of entity linking and knowledge reasoning [J]. Systems Engineering and Electronics, 2022, 44(9): 2878-2885. |
| [15] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||