Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 165-174.doi: 10.12305/j.issn.1001-506X.2023.01.20
• Systems Engineering • Previous Articles
Non-myopic scheduling method for mobile active/passive sensor in clutter environment
Lei AN, Zhaorui LI, Bing JI
- Department of Electronic and Optical Engineering, Army Engineering University Shijiazhuang Campus, Shijiazhuang 050003, China
-
Received:2021-07-21Online:2023-01-01Published:2023-01-03 -
Contact:Lei AN
CLC Number:
Cite this article
Lei AN, Zhaorui LI, Bing JI. Non-myopic scheduling method for mobile active/passive sensor in clutter environment[J]. Systems Engineering and Electronics, 2023, 45(1): 165-174.
share this article
Fig.1
Working diagram of active/passive sensor system based on mobile platform"
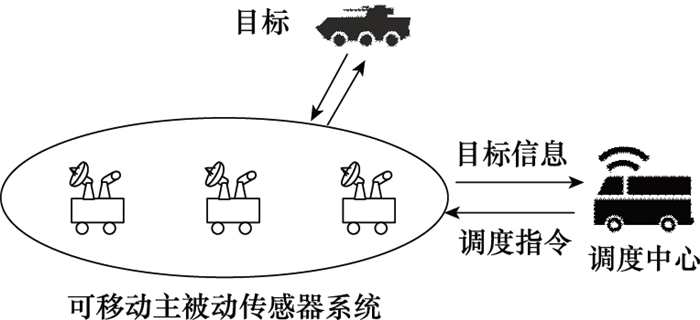

Fig.2
Maneuvering scheme of sensor platform while NR=2、Nθ=8"
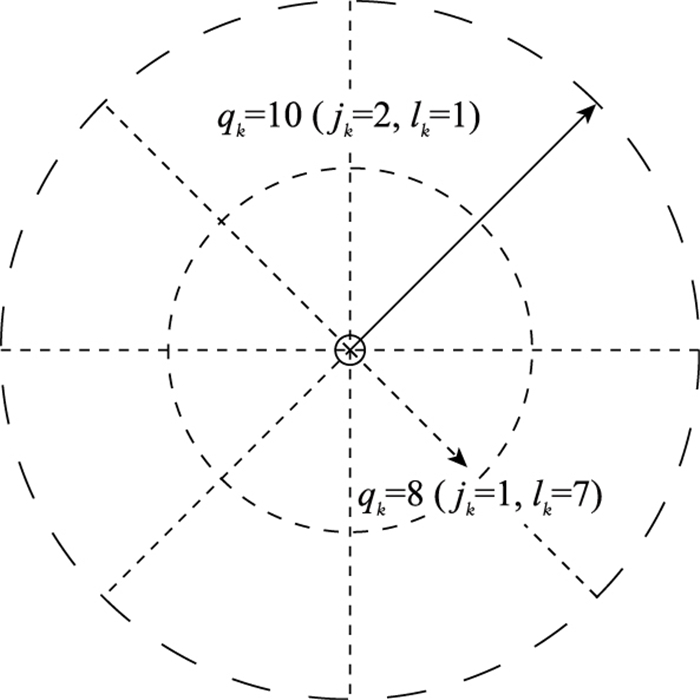
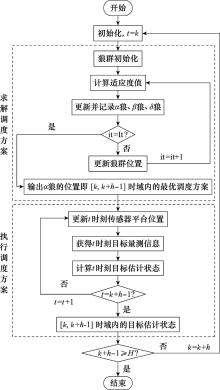
Fig.3
Non-myopic scheduling process"
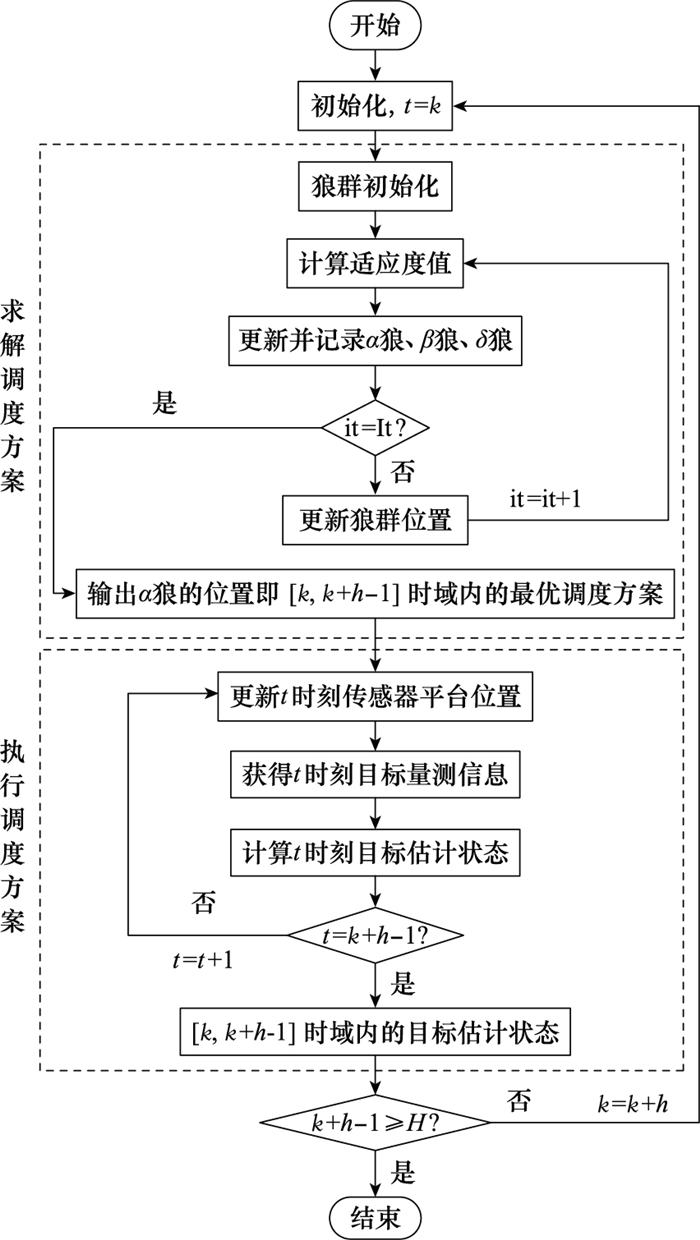
Fig.4
Real trajectory of multi-target and the observation trajectory scheduled by the proposed method"
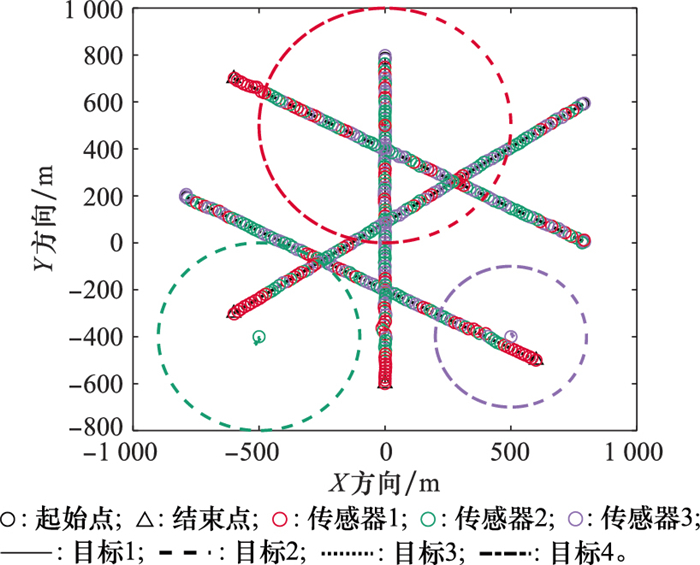
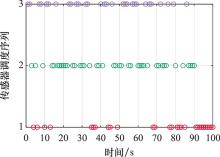
Fig.5
Sensor scheduling sequence obtained by the proposed method"
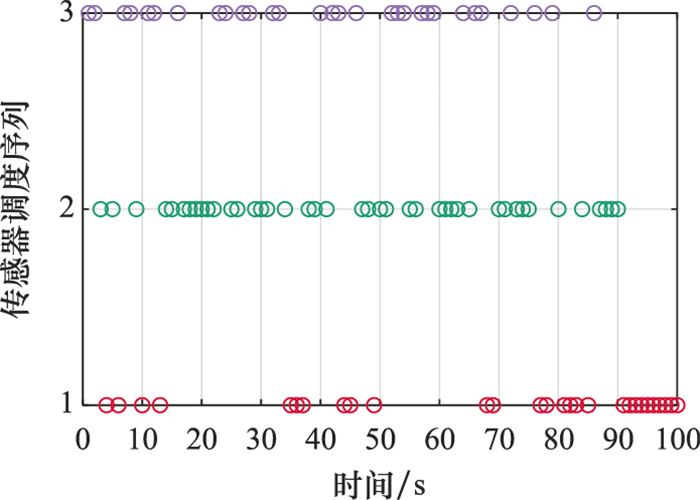
Fig.6
OSPA distance obtained when only the tracking accuracy is optimized"
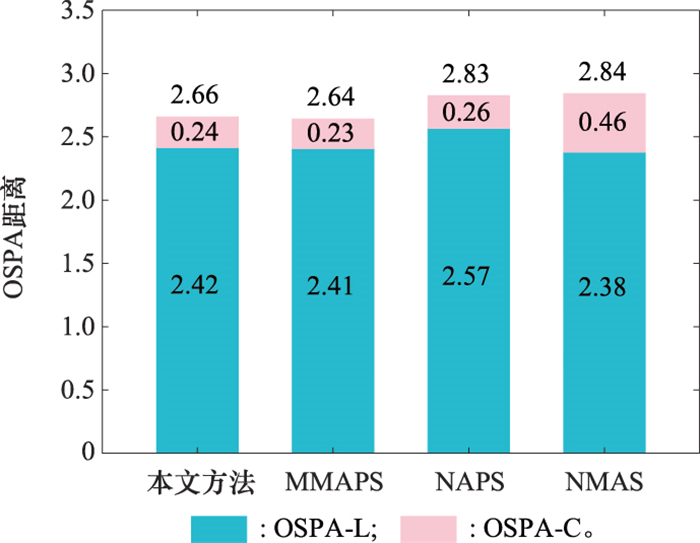

Fig.7
CRC obtained when only the radiation cost is optimized"

Table 1
Comparison of scheduling performance of balance optimization under different decision time"
| 衡量指标 | h=2 | h=3 | h=4 | MMAPS | ||||||||
| 本文方法 | NAPS | NMAS | 本文方法 | NAPS | NMAS | 本文方法 | NAPS | NMAS | ||||
| OSPA | 3.02 | 3.03 | 3.02 | 3.02 | 3.02 | 3.03 | 3.02 | 3.04 | 3.03 | 3.03 | ||
| OSPA-L | 2.74 | 2.73 | 2.64 | 2.72 | 2.71 | 2.73 | 2.66 | 2.60 | 2.66 | 2.73 | ||
| OSPA-C | 0.28 | 0.30 | 0.37 | 0.30 | 0.31 | 0.29 | 0.36 | 0.44 | 0.37 | 0.30 | ||
| CRC | 52.85 | 74.07 | 226.32 | 50.73 | 62.30 | 160.77 | 85.94 | 108.40 | 463.62 | 102.70 | ||
| TIME/s | 29.37 | 35.30 | 33.81 | 34.29 | 36.14 | 32.11 | 40.26 | 39.66 | 38.78 | 22.22 | ||
| 1 | 闫涛, 韩崇昭, 张光华. 空中目标传感器管理方法综述[J]. 航空学报, 2018, 39 (10): 26- 36. |
| YAN T , HAN C Z , ZHANG G H . An overview of sensor management approaches for aerial target[J]. Acta Aeronautica Sinica, 2018, 39 (10): 26- 36. | |
| 2 |
ROGALSHI A , MARTYNIUK P , KOPYTKO M , et al. Trends in performance limits of the hot infrared photodetectors[J]. Applied Sciences, 2021, 11 (2): 501.
doi: 10.3390/app11020501 |
| 3 | XU G G , SHAN G L , DUAN X X . Non-myopic scheduling method of mobile sensors for manoeuvring target tracking[J]. IET Radar, Sonar & Navigation, 2019, 13 (11): 1899- 1908. |
| 4 | VIGNESH R , SUNDARAM G A S , GANDHIRAJ R . Phase-modulated stepped frequency waveform design for low probability of detection radar signals[J]. Advances in Intelligent Systems and Computing, 2019, 910, 181- 195. |
| 5 |
SHAN G L , XU G G , QIAO C L . A non-myopic scheduling method of radar sensors for maneuvering target tracking and radiation control[J]. Defence Technology, 2020, 16 (1): 242- 250.
doi: 10.1016/j.dt.2019.10.001 |
| 6 | HUAI T Y, LIU M Q, ZHANG S L, et al. Active sensor radiation control based on posterior Cramer-Rao lower bound with passive measurement[C]//Proc. of the IEEE Chinese Control Conference, 2019: 3564-3570. |
| 7 | BAO T T, ZHANG Z K, SABAHI M F. An improved radar and infrared sensor tracking fusion algorithm based on IMM-UKF[C]// Proc. of the IEEE 16th International Conference on Networking, Sensing and Control, 2019: 420-423. |
| 8 | PANG C , SHAN G L , MA W N , et al. Sensor radiation interception risk control in target tracking[J]. Defence Technology, 2019, 16 (3): 695- 704. |
| 9 |
QIAO C L , SHAN G L , YAN L , et al. Nonmyopic sensor scheduling for target tracking with emission control[J]. International Journal of Adaptive Control and Signal Processing, 2019, 33 (5): 767- 783.
doi: 10.1002/acs.2987 |
| 10 | SMITH J, PARTICKE F, HILLER M, et al. Systematic analysis of the PMBM, PHD, JPDA and GNN multi-target tracking filters[C]//Proc. of the IEEE 22nd International Conference on Information Fusion, 2019. |
| 11 | ZHU Y , WANG J , LIANG S , et al. Covariance control joint integrated probabilistic data association filter for multi-target tracking[J]. IET Radar, Sonar & Navigation, 2019, 13 (4): 584- 592. |
| 12 | BREKKE E , CHITRE M . Relationship between finite set statistics and the multiple hypothesis tracker[J]. IEEE Trans.on Aerospace & Electronic Systems, 2018, 54 (4): 1902- 1917. |
| 13 | MAHLER R . Advances in statistical multisource-multitarget information fusion[M]. Norwood: Artech House, 2014. |
| 14 | ZHANG H Q , GE H W , YANG J L . Improved Gaussian mixture probability hypothesis density for tracking closely spaced targets[J]. International Journal of Electronics & Telecommunications, 2017, 63 (3): 247- 254. |
| 15 |
DELANDE E , BRYANT D , GEHLY S , et al. The CPHD filter with target spawning[J]. IEEE Trans.on Signal Processing, 2017, 65 (5): 13124- 13138.
doi: 10.1109/TSP.2016.2597126 |
| 16 |
VO B N , VO B T , HOANG H G . An efficient implementation of the generalized labeled Multi-Bernoulli filter[J]. IEEE Trans.on Signal Processing, 2017, 65 (8): 1975- 1987.
doi: 10.1109/TSP.2016.2641392 |
| 17 | GOSTR K A , HOSEINNEZHAD R , BAB H A , et al. Sensor-management for multitarget filters via minimization of posterior dispersion[J]. IEEE Trans.on Aerospace & Electronic Systems, 2017, 53 (6): 2877- 2884. |
| 18 | 陈辉, 贺忠良, 连峰, 等. 基于高斯混合多目标滤波器的传感器控制策略[J]. 电子学报, 2019, 47 (3): 521- 530. |
| CHEN H , HE Z L , LIAN F , et al. Sensor control strategy based on Gaussian mixture multi-target filter[J]. Acta Electronica Sinica, 2019, 47 (3): 521- 530. | |
| 19 | JIANG X Y, YI W, YUAN Y, et al. Network cost based node selection strategy for multiple target tracking in netted radar system[C]//Proc. of the IEEE Radar Conference, 2019. |
| 20 | ANGLEY D , RISTIC B , SUVOROVA S , et al. Non-myopic sensor scheduling for multistatic sonobuoy fields[J]. IET Radar, Sonar & Navigation, 2017, 11 (12): 1770- 1775. |
| 21 | 赖作镁, 乔文昇, 古博, 等. 任务性能约束下传感器协同辐射控制策略[J]. 系统工程与电子技术, 2019, 41 (8): 1749- 1754. |
| LAI Z M , QIAO W S , GU B , et al. Research on sensor coope-rative radiation control strategy under task performance constraints[J]. Systems Engineering and Electronics, 2019, 41 (8): 1749- 1754. | |
| 22 |
LIAN F , HOU L M , LIU J , et al. Constrained multi-sensor control using a multi-target MSE bound and a δ-GLMB filter[J]. Sensors, 2018, 18 (7): 2308- 2031.
doi: 10.3390/s18072308 |
| 23 |
XU G G , SHAN G L , DUAN X S . Sensor scheduling for ground maneuvering target tracking in presence of detection blind zone[J]. Journal of Systems Engineering and Electronics, 2020, 31 (4): 692- 702.
doi: 10.23919/JSEE.2020.000044 |
| 24 |
LI Y Y , GUO L M , HUANG X S . Research and application of multi-target tracking based on GM-PHD filter[J]. Optics and Photonics Journal, 2020, 10 (6): 125- 133.
doi: 10.4236/opj.2020.106013 |
| 25 | NIE Y F , ZHANG T . Improved pruning algorithm for Gaussian mixture probability hypothesis density filter[J]. Journal of Systems Engineering and Electronics, 2018, 29 (2): 229- 235. |
| 26 | 丁鹭飞, 耿富录, 陈建春. 雷达原理[M]. 5版 北京: 电子工业出版社, 2014. |
| DING L F , GENG F L , CHEN J C . Radar principles[M]. 5th ed Beijing: Publishing House of Electronics Industry, 2014. | |
| 27 | LUKE R , STEPHEN B . Non-coherent radar detection performance in medium grazing angle X-Band sea clutter[J]. IEEE Trans.on Aerospace & Electronic Systems, 2017, 53 (2): 669- 682. |
| 28 | 吴巍, 王国宏, 薛冰. 多传感器协同管理与辐射控制技术[M]. 北京: 国防工业出版社, 2019. |
| WU W , WANG G H , XUE B . Multisensor synergistic management and radiation control technology[M]. Beijing: National Defense Industry Press, 2019. | |
| 29 | 吴卫华, 孙合敏, 蒋苏蓉, 等. 随机有限集目标跟踪[M]. 北京: 国防工业出版社, 2020. |
| WU W H , SUN H M , JIANG S R , et al. Target tracking with random finite sets[M]. Beijing: National Defense Industry Press, 2020. | |
| 30 | LI Y W , HU J W , JI B , et al. New accuracy evaluation index for track fusion algorithms[J]. Journal of Shanghai Jiaotong University (Science), 2020, 25 (1): 97- 105. |
| 31 | MIRJALILI S , MIRJALILI S M , LEWIS A . Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69, 46- 61. |
| [1] | Huaisheng XIN, Chen CAO. Interacting multiple model based grouping δ-generalized labeledmulti-Bernoulli algorithm [J]. Systems Engineering and Electronics, 2022, 44(4): 1128-1138. |
| [2] | Zizhuang SONG, Jiawei YANG, Dongfang ZHANG, Shiqiang WANG, Shuo ZHANG. Real-time infrared multi-class multi-target anchor-free tracking network [J]. Systems Engineering and Electronics, 2022, 44(2): 401-409. |
| [3] | Lifan YIN, Yiqun ZHANG, Shuo WANG, Chenggang SUN. A survey on histogram probabilistic multi-hypothesis tracker technique [J]. Systems Engineering and Electronics, 2021, 43(11): 3118-3125. |
| [4] | Zhengjie LI, Junwei XIE, Haowei ZHANG, Zhaojian ZHANG. Joint power and bandwidth allocation algorithm based on collocated MIMO radar [J]. Systems Engineering and Electronics, 2020, 42(5): 1041-1049. |
| [5] | Xiaodong LU, Tao CUI, Wei WANG, Cheng CHENG. Multi-target labeled multi-Bernoulli filter with time-delay and registration errors [J]. Systems Engineering and Electronics, 2020, 42(4): 904-911. |
| [6] | Chuang CHEN, Ningyun LU, Bin JIANG, Yin XING. Optimization of condition-based maintenance strategy for single-unit accelerated degrading systems [J]. Systems Engineering and Electronics, 2020, 42(3): 613-619. |
| [7] | Peng WANG, Mei YANG, Jiancheng ZHU, Rusheng JU, Ge LI. Dynamic data driven modeling and simulation method for digital twin [J]. Systems Engineering and Electronics, 2020, 42(12): 2779-2786. |
| [8] | LI Bo, LI Qingying, GAO Xiaoguang, ZHANG Chunyan. Radar radiation control under multiple sensor synergy based on ordinal optimization [J]. Systems Engineering and Electronics, 2018, 40(7): 1465-1471. |
| [9] | CAO Zhuo, FENG Xinxi, PU Lei, WANG Xue, ZHANG Linlin. Multiple extended target tracking algorithm based on labeled random finite set filter [J]. Systems Engineering and Electronics, 2018, 40(3): 526-532. |
| [10] | PENG Huafu, HUANG Gaoming, TIAN Wei, QIU Hao. Labeled multi-Bernoulli filter based on amplitude information [J]. Systems Engineering and Electronics, 2018, 40(12): 2636-2641. |
| [11] | LIU Jianye, WANG Hua, ZHOU Wanmeng. LEO constellation sensor resources scheduling algorithm based on Genetic and Simulated annealing [J]. Systems Engineering and Electronics, 2018, 40(11): 2476-. |
| [12] | ZHANG Xiang, LI Ge, WANG Peng. Research on target detection in anti-submarine warfare simulation system based on DDDAS [J]. Systems Engineering and Electronics, 2018, 40(11): 2591-. |
| [13] | GU Xiaolin, ZHOU Shilin, LEI Lin. Multi-target tracking based on m-best data association and tracklet associatio [J]. Systems Engineering and Electronics, 2017, 39(7): 1640-1646. |
| [14] | YUAN Changshun, WANG Jun, XIANG Hong, SUN Jinping. Adaptive δ-GLMB filtering algorithm based on VB approximation [J]. Systems Engineering and Electronics, 2017, 39(2): 237-243. |
| [15] | ZHU Yun, WANG Jun, XING Yushuai, L Xiaoyong. Adaptive receiver selection for passive radar network [J]. Systems Engineering and Electronics, 2017, 39(11): 2441-2447. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||