Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (7): 2192-2202.doi: 10.12305/j.issn.1001-506X.2023.07.30
• Guidance, Navigation and Control • Previous Articles Next Articles
Research of formation rendezvous control for manned/unmanned aerial vehicles formation
Liyao WU1,2, Xichao SU3,*, Lei WANG2, Zishuang PAN1
- 1. College of Aviation Foundation, Naval Aviation University, Yantai 264001, China
2. No.91404 of the PLA, Qinhuangdao 066000, China
3. College of Aeronautical Operations Service, Naval Aviation University, Yantai 264001, China
-
Received:2022-03-24Online:2023-06-30Published:2023-07-11 -
Contact:Xichao SU
CLC Number:
Cite this article
Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation[J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202.
share this article
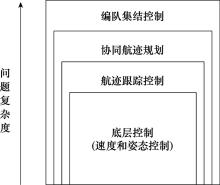
Fig.1
Decomposition of formation rendezvous control problem"

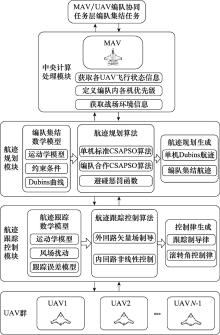
Fig.2
Structure of formation rendezvous control"

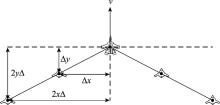
Fig.3
Diagram of wedge formation"

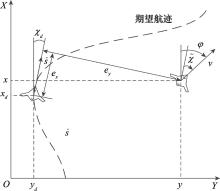
Fig.4
UAV path following errors model"

Table 1
Basic simulation parameters"
| 参数 | 数值 |
| N | 5 |
| 集结高度hd/m | 3 000 |
| MAV期望速度vl/(m/s) | 200 |
| UAV期望速度vf/(m/s) | 200 |
| 队形参数 | (200 m,200 m) |
| MAV最大滚转角 | π/3 |
| UAV最大滚转角 | π/3 |
| MAV安全半径Rl/m | 30 |
| UAV安全半径Rf/m | 20 |
| 粒子数M | 20 000 |
| 最大迭代次数TT | 50 |
| 学习因子c1, c2 | 15 |
| 初始温度Ti | 100 |
| 结束温度Tf | 1e-8 |
| 退火速率 | 0. 98 |
| 阈值 | 0N01 |
| 惩罚因子kinner | 10 000 |
| 惩罚因子kouter | 10 000 |
Table 2
Simulation parameters of experiment 1"
| 参数 | 数值 |
| MAV起飞状态(x, y, z, φ, θ) | (0, 0, 0, 0, 0) |
| 舰面保障时间ΔT/s | 40 |
| 航母速度Vship/(m/s) | 16 |
| 离舰速度V/(m/s) | 120 |
| MAV航迹倾角θmax | π/3 |
| UAV航迹倾角θmax | π/4 |
| MAV加速度/(m/s2) | 30 |
| UAV加速度/(m/s2) | 20 |
Table 3
Initial values of experiment 2"
| 参数 | 数值 |
| MAV(x, y, φ) | (0 m, 0 m, 0) |
| UAV1(x, y, φ) | (10 000 m, -10 000 m, 0) |
| UAV2(x, y, φ) | (15 000 m, 8 000 m, π/4) |
| UAV3(x, y, φ) | (15 000 m, 8 000 m, 3π/2) |
| UAV4(x, y, φ) | (25 000 m, 10 000 m, 2π/3) |
| 禁飞区(xo, yo, R) | (12 000 m, 6 000 m, 1 000 m) |
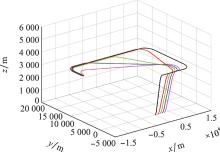
Fig.5
Three-dimensional planning diagram of MAV/UAV formation taking off rendezvous"

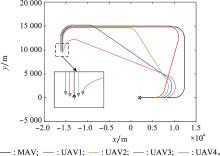
Fig.6
Two-dimensional planning diagram of MAV/UAV formation taking off rendezvous"

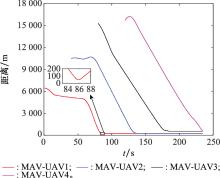
Fig.7
Curve of relative distance variation between MAV and UAV"


Fig.8
Diagram of formation rendezvous planning in different positions"

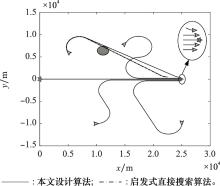
Fig.9
Comparison diagram of planning path with two algorithms"

Table 4
Rendezvous time difference between single UAV and MAV"
| 算法 | UAV1 | UAV2 | UAV3 | UAV4 | J |
| CSAPSO | 2.9e-4 | 2e-3 | 1.6e-3 | 1.3e-5 | 4e-3 |
| CGA | 0.15 | 0.24 | 0.05 | 0.11 | 0.55 |
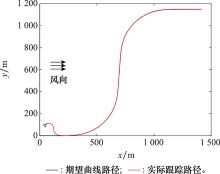
Fig.10
Diagram of UAV desired path following result"

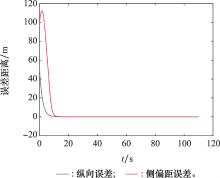
Fig.11
Diagram of UAV path following errors"


Fig.12
Virtual target speed"


Fig.13
Heading rate variation curve"


Fig.14
Roll angle change curve"

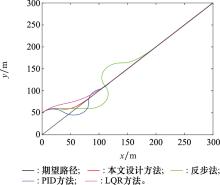
Fig.15
Comparison of path following"
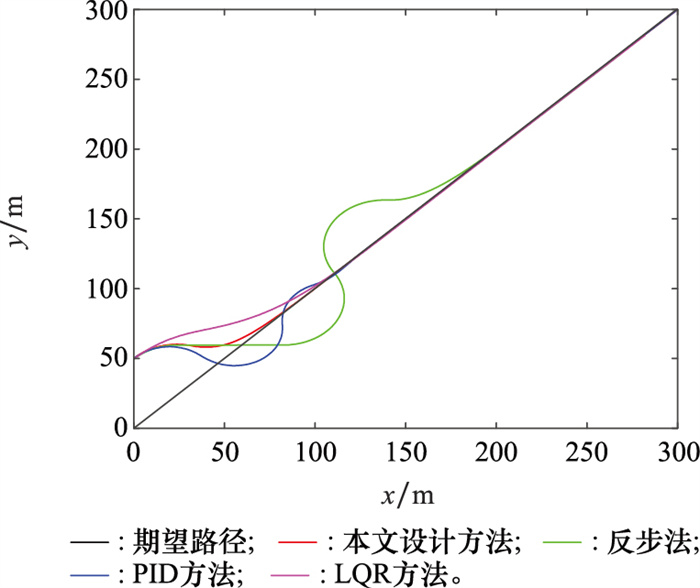
Table 5
Initial values of simulation"
| 参数 | 数值 |
| MAV(xl, yl, χl) | (0 m, 0 m, 0) |
| UAV1(x1, y1, χ1) | (10 000 m, -9 950 m, π/4) |
| UAV2(x2, y2, χ2) | (14 950 m, 8 050 m, π/4) |
| UAV3(x3, y3, χ3) | (25 050 m, -10 000 m, 3π/2) |
| UAV4(x4, y4, χ4) | (5 050 m, 6 000 m, 2π/3) |
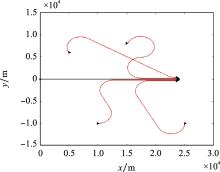
Fig.16
Diagram of rendezvous path following effect for MAV/UAV formation"
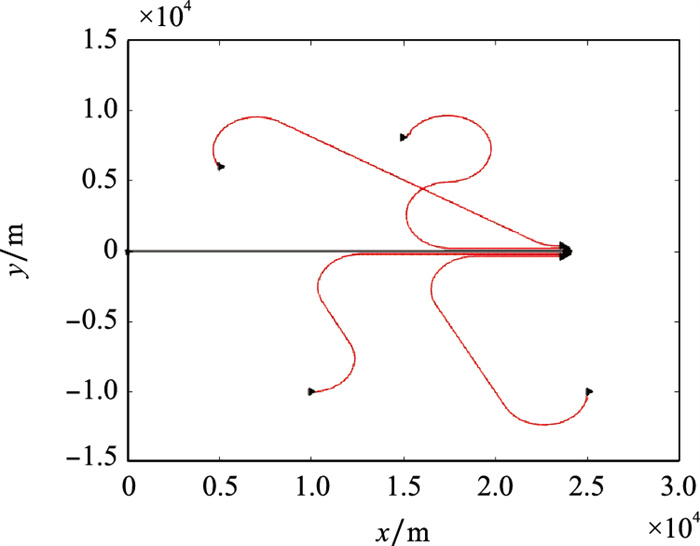

Fig.17
Local enlarged diagram of path following for each UAV"

| 1 | 朱旭, 张逊逊, 尤瑾语, 等. 基于信息一致性的无人机紧密编队集结控制[J]. 航空学报, 2015, 36 (12): 3919- 3929. |
| ZHU X , ZHANG X X , YOU J Y , et al. Swarm control of UAV close formation based on information consensus[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36 (12): 3919- 3929. | |
| 2 | LIU G L , XING D J , HOU J Y , et al. Distributed cooperative control algorithm for multi-UAV mission rendezvous[J]. Tran-sactions of Nanjing University of Aeronautics and Astronautics, 2017, 34 (6): 617- 626. |
| 3 |
MANATHARA J G , GHOSE D . Rendezvous of multiple UAVs with collision avoidance using consensus[J]. Journal of Aerospace Engineering, 2012, 25 (4): 480- 489.
doi: 10.1061/(ASCE)AS.1943-5525.0000145 |
| 4 | 李聪, 王勇, 周欢, 等. 多无人作战飞机定点定时集结策略[J]. 飞行力学, 2018, 36 (5): 53- 57. |
| LI C , WANG Y , ZHOU H , et al. Strategy of multiple UCAVs rendezvousing at fixed point and time[J]. Flight Dynamics, 2018, 36 (5): 53- 57. | |
| 5 | 袁利平, 陈宗基, 周锐, 等. 多无人机同时到达的分散化控制方法[J]. 航空学报, 2010, 31 (4): 797- 805. |
| YUAN L P , CHEN Z J , ZHOU R , et al. Decentralized control for simultaneous arrival of multiple UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31 (4): 797- 805. | |
| 6 | 符小卫, 崔洪杰, 高晓光. 多无人机集结问题分布式求解方法[J]. 系统工程与电子技术, 2015, 37 (8): 1797- 1802. |
| FU X W , CUI H J , GAO X G . Distributed solving method of multi-UAV rendezvous problem[J]. Systems Engineering and Electronics, 2015, 37 (8): 1797- 1807. | |
| 7 | 谭雁英, 薛亮, 张艳宁, 等. 通信拓扑变化条件下多无人机同时到达控制策略[J]. 西北工业大学学报, 2018, 36 (3): 565- 570. |
| TAN Y Y , XUE L , ZHANG Y N , et al. Control strategies for multi-UAV simultaneous arrival under communication topology changing[J]. Journal of Northwestern Polytechnical University, 2018, 36 (3): 565- 570. | |
| 8 | SHAO Z , YAN F , ZHOU Z , et al. Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization[J]. Applied Sciences, 2019, 9 (13): 2621. |
| 9 | 杨军, 王道波, 渠尊尊, 等. 基于元胞遗传算法的多无人机编队集结路径规划[J]. 机械与电子, 2018, 36 (1): 26- 30. |
| YANG J , WANG D B , QU Z Z , et al. Formation rendezvous route planning for multi-UAV based on cellular genetic algorithm[J]. Machinery & Electronics, 2018, 36 (1): 26- 30. | |
| 10 | 朱学平, 杨军, 袁博, 等. 固定翼无人机编队集结控制算法研究[J]. 导航定位与授时, 2020, 7 (5): 128- 133. |
| ZHU X P , YANG J , YANG B , et al. Research on formation control of multiple fixed-wing UAVs[J]. Navigation Position & Timing, 2020, 7 (5): 128- 133. | |
| 11 | ZHEN Z Y, GAO C, ZHAO Q N, et al. Cooperative path planning for multiple UAVs formation[C]//Proc. of the IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, 2014. |
| 12 | YAO W R , QI N M , LIU Y F . Online trajectory generation with rendezvous for UAVs using multistage path prediction[J]. Journal of Aerospace Engineering, 2017, 30 (3): 0416092. |
| 13 | DUBINS L E . On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J]. American Journal of Mathematics, 1957, 79 (3): 497- 516. |
| 14 | WILSON D B, MIGUEL A T S, ALI H G, et al. Real-time rendezvous point selection for a nonholonomic vehicle[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2013. |
| 15 | 孙小雷, 孟宇麟, 齐乃明, 等. 多无人机交会过程的协同航迹规划方法[J]. 机器人, 2015, 37 (5): 621- 627. |
| SUN X L , MENG Y L , QI N M , et al. Cooperative path planning for rendezvous of unmanned aerial vehicles[J]. Robot, 2015, 37 (5): 621- 627. | |
| 16 | WANG Z , LIU L , LONG T , et al. Efficient unmanned aerial vehicle formation rendezvous trajectory planning using Dubins path and sequential convex programming[J]. Engineering Optimization, 2019, 51 (8): 1412- 1429. |
| 17 | 薛永生, 吴立尧. 基于模拟退火的改进粒子群算法研究及应用[J]. 海军航空工程学院学报, 2018, 33 (2): 248- 252. |
| XUE Y S , WU L Y . Research and application of improved PSO algorithm based on simulated annealing[J]. Journal of Naval Aeronautical and Astronautical University, 2018, 33 (2): 248- 252. | |
| 18 | 赵述龙, 王祥科, 张代兵, 等. 固定翼无人机曲线路径跟踪的积分向量场方法[J]. 国防科技大学学报, 2018, 40 (2): 119- 124. |
| ZHAO S L , WANG X K , ZHANG D B , et al. Curved path following for fixed-wing unmanned aerial vehicles using integral vector field[J]. Journal of National University of Defense Technology, 2018, 40 (2): 119- 124. | |
| 19 | NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for unmanned air vehicles[C]//Proc. of the American Control Conference, 2006: 5788-5794. |
| 20 | NELSON D R , BARBER D B , MCLAIN T W , et al. Vector field path following for miniature air vehicles[J]. IEEE Trans.on Robotics, 2007, 23 (3): 519- 529. |
| 21 | GRIFFITHS S R. Vector field approach for curved path following for miniature aerial vehicles[C]//Proc. of the AIAA Gui-dance, Navigation, and Control Conference and Exhibit, 2006: 63-64. |
| 22 | LIANG Y Q , JIA Y M . Combined vector field approach for 2D and 3D arbitrary twice differentiable curved path following with constrained UAVs[J]. Journal of Intelligent & Robotic Systems, 2016, 83 (1): 133- 160. |
| 23 | ZHAO S L , WANG X K , LIN Z Y , et al. Integrating vector field approach and input-to-state stability curved path following for unmanned aerial vehicles[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2020, 50 (8): 2897- 2907. |
| [1] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [2] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [3] | Qinglu WANG, Fengguo WU, Chengchen ZHENG, Hui LI. UAV path planning based on optimized artificial potential field method [J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. |
| [4] | Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control [J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110. |
| [5] | Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm [J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. |
| [6] | Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. |
| [7] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [8] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [9] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [10] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [11] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [12] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [13] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [14] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| [15] | Wenming WANG, Jialu DU. Agent path planning based on regular hexagon grid JPS algorithm [J]. Systems Engineering and Electronics, 2021, 43(12): 3635-3642. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||