Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (3): 747-754.doi: 10.12305/j.issn.1001-506X.2021.03.19
• Systems Engineering • Previous Articles Next Articles
Analysis of multi wave task planning model based on UAV real-time data
Chunyu HU1,2( ), Weidong LIU1(), Tianxiang YU1(), Liyao ZHOU2(), Chen FENG2()
), Weidong LIU1(), Tianxiang YU1(), Liyao ZHOU2(), Chen FENG2()
- 1. Basic Disciplinary Department, Rocket Force University of Engineering, Xi'an 710025, China
2. Graduate School, Rocket Force University of Engineering, Xi'an 710025, China
-
Received:2020-06-19Online:2021-03-01Published:2021-03-16
CLC Number:
Cite this article
Chunyu HU, Weidong LIU, Tianxiang YU, Liyao ZHOU, Chen FENG. Analysis of multi wave task planning model based on UAV real-time data[J]. Systems Engineering and Electronics, 2021, 43(3): 747-754.
share this article
Table 1
Analysis of maneuver influence factors"
| 编号 | 影响机动时间 | 代号 | 影响因子权重δ |
| 1 | 装备故障维修 | tb | 0.5 |
| 2 | 技术处置 | tc | 0.2 |
| 3 | 综合防抗 | td | 0.2 |
| 4 | 其他 | te | 0.1 |
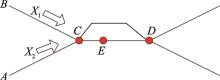
Fig.1
Schematic diagram of "meeting" in a motor section"
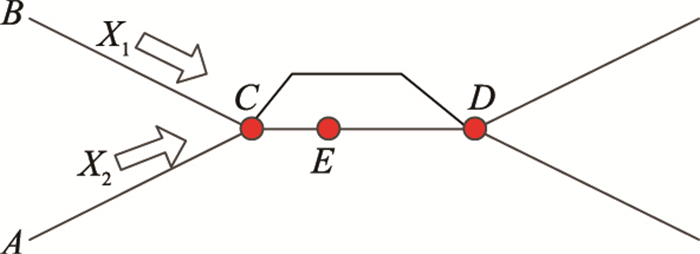
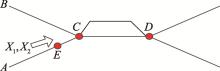
Fig.2
Schematic diagram of "overtaking" in a motor section"
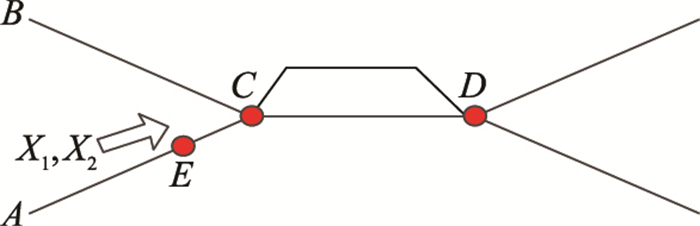
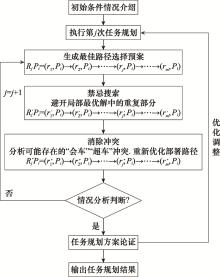
Fig.3
Algorithm flow design"
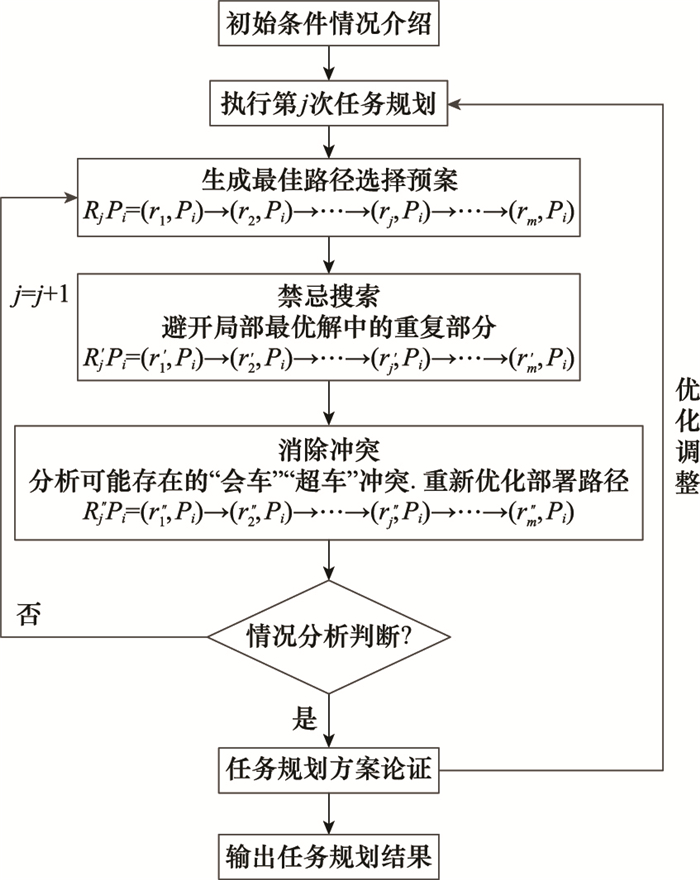

Fig.4
Chromosome coding diagram"
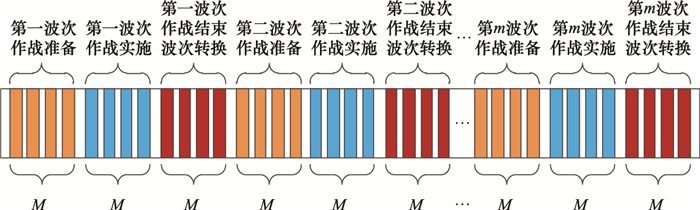
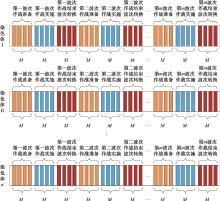
Fig.5
Initial parent chromosome"
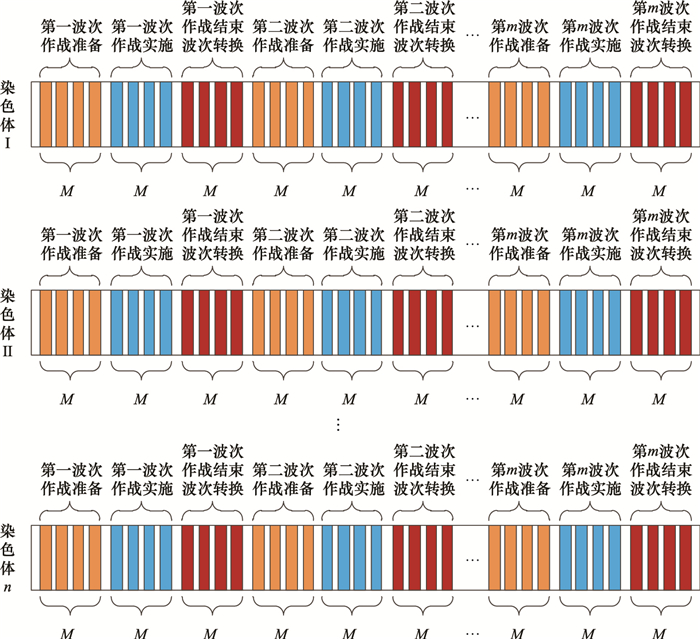
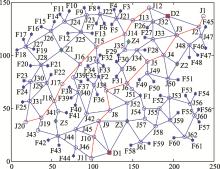
Fig.6
Distribution of battle position nodes"
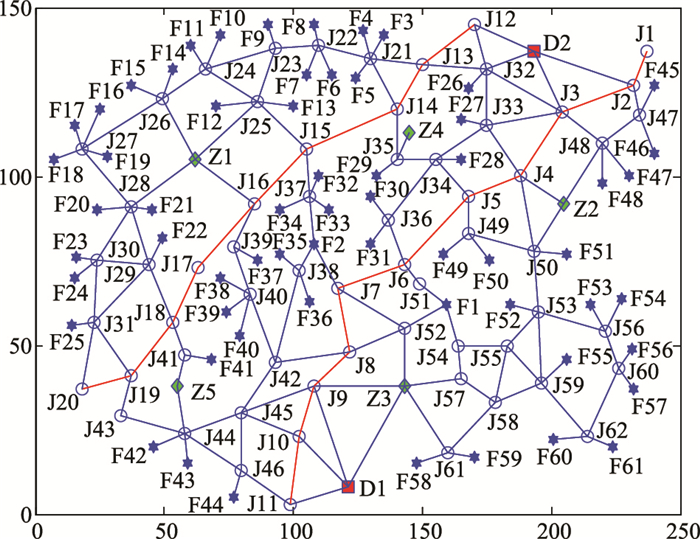
Table 2
Initial planning scheme"
| 装备序号 | 第一波次 | 第二波次 | 第N波次 | ||||
| 作战准备 | 作战实施 | 波次转换 | 作战实施 | 波次转换 | … | 待机 | |
| X1 | D2 | F32 | Z1 | F37 | Z1 | … | D2 |
| X2 | D2 | F33 | Z1 | F38 | Z1 | … | D2 |
| X3 | D2 | F34 | Z1 | F39 | Z1 | … | D2 |
| X4 | D2 | F48 | Z2 | F51 | Z2 | … | D2 |
| X5 | D2 | F47 | Z2 | F49 | Z2 | … | D2 |
| X6 | D2 | F46 | Z2 | F50 | Z2 | … | D2 |
| X7 | D1 | F38 | Z3 | F58 | Z3 | … | D1 |
| X8 | D1 | F39 | Z3 | F59 | Z3 | … | D1 |
| X9 | D1 | F40 | Z3 | F1 | Z3 | … | D1 |
| X10 | D2 | F3 | Z4 | F29 | Z4 | … | D2 |
| X11 | D2 | F4 | Z4 | F28 | Z4 | … | D2 |
| X12 | D2 | F5 | Z4 | F30 | Z4 | … | D2 |
| X13 | D1 | F44 | Z5 | F41 | Z5 | … | D1 |
| X14 | D1 | F42 | Z5 | F22 | Z5 | … | D1 |
| X15 | D1 | F43 | Z5 | F21 | Z5 | … | D1 |
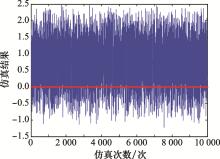
Fig.7
Simulation results of backup path distance between 12 times of the original path distance"
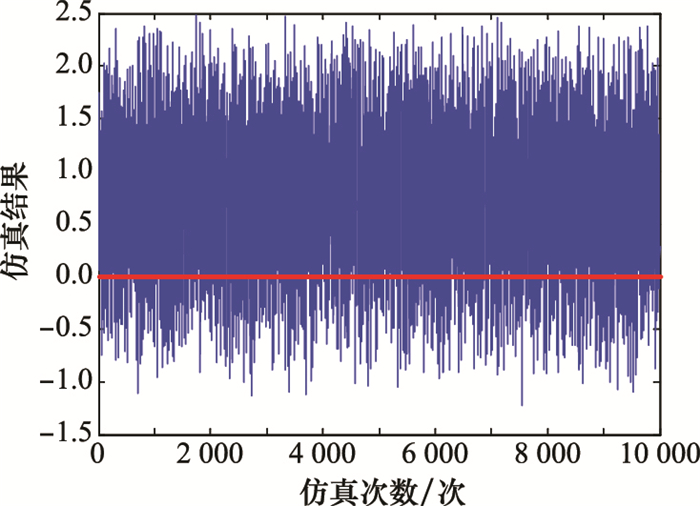
Fig.8
Simulation results of backup path distance more than twice of the original path distance"
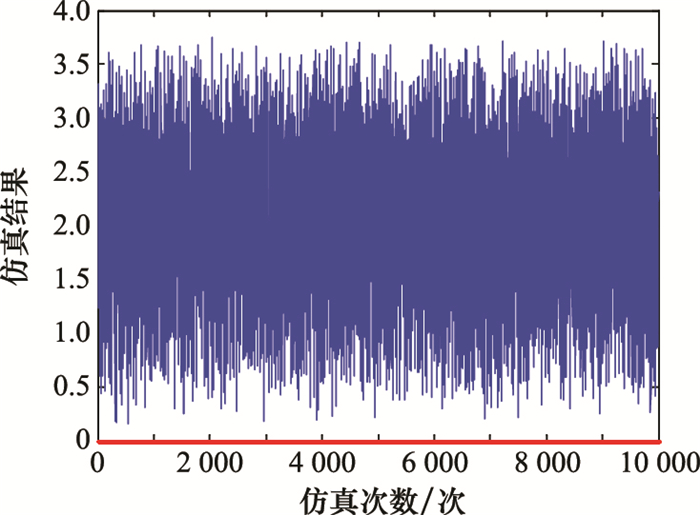

Fig.9
Overtaking conflict diagram"
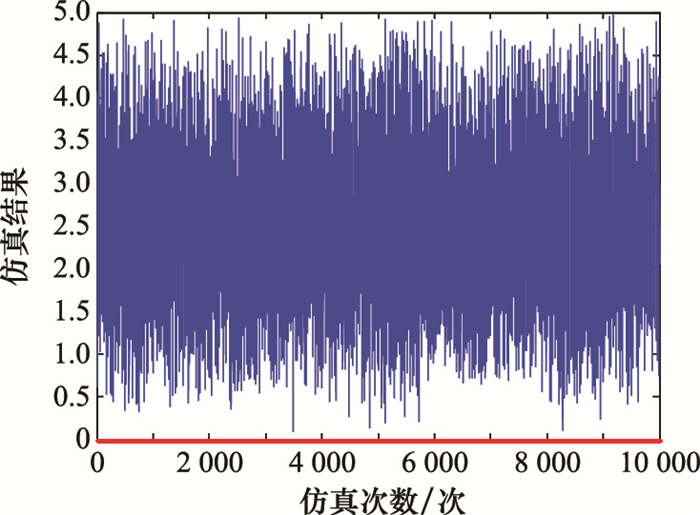
Table 3
Final path planning scheme of part of task planning"
| 装备序号 | 最优规划方案 |
| X1 | D2→J12→J13→J14→J15→J37→F32(第一波次)→J37→J15→J16→Z1→J16→J39→F37(第二波次)→…→(第Y波次)D2 |
| X2 | D2→J12→J13→J14→J15→J37→F33(第一波次)→J37→J15→J16→Z1→J16→J39→J40→F38(第二波次)→…→(第Y波次)D2 |
| X3 | D2→J12→J13→J14→J15→J37→F34(第一波次)→J37→J15→J16→Z1→J16→J39→J40→F39(第二波次)→…→(第Y波次)D2 |
| X4 | D2→J3→J48→F48(第一波次)→J48→Z2→J50→F51→…→(第Y波次)D2 |
| X5 | D2→J3→J48→F47(第一波次)→J48→Z2→J50→J49→F49(第二波次)→…→(第Y波次)D2 |
| X6 | D2→J3→J48→J47→F46(第一波次)→J47→J48→Z2→J50→J49(第二波次)→F50→…→(第Y波次)D2 |
| X7 | D1→J10→J45→J42→J40→F38(第一波次)→J40→J42→J8→J52→Z3→J61→F58(第二波次)→…→(第Y波次)D1 |
| X8 | D1→J10→J45→J42→J40→F39(第一波次)→J40→J42→J8→J52→Z3→J61→F59(第二波次)→…→(第Y波次)D1 |
| X9 | D1→J10→J45→J42→J40→F40(第一波次)→J40→J42→J8→J52→Z3→J52→F1(第二波次)→…→(第Y波次)D1 |
| X10 | D2→J12→J13→J21→F3(第一波次)→J21→J14→J35→Z4→J35→F29(第二波次)→…→(第Y波次)D2 |
| X11 | D2→J12→J13→J21→F4(第一波次)→J21→J14→J35→Z4→J35→J34→F28(第二波次)→…→(第Y波次)D2 |
| X12 | D2→J12→J13→J21→F5(第一波次)→J21→J14→J35→Z4→J35→J34→J36→F30(第二波次)→…→(第Y波次)D2 |
| X13 | D1→J11→J46→F44(第一波次)→J46→J44→Z5→J41→F41(第二波次)→…→(第Y波次)D1 |
| X14 | D1→J11→J46→J44→F42(第一波次)→J44→Z5→J41→J18→J29→F22(第二波次)→…→(第Y波次)D1 |
| X15 | D1→J11→J46→J44→F43(第一波次)→J44→Z5→J41→J18→J29→J28→F21(第二波次)→…→(第Y波次)D1 |
| 1 |
SHAN J C , LIU Q B . Analysis of the impact of battlefield environment on military operation effectiveness using fuzzy influence diagram[J]. International Journal of Fuzzy Systems, 2019, 21 (6): 1882- 1893.
doi: 10.1007/s40815-019-00662-6 |
| 2 |
CANDACE F , RONALD L J . Principle assumptions ofregression analysis: testing, techniques, and statistical reporting of imperfect data sets[J]. Advances in Developing Human Resources, 2019, 21 (4): 484- 502.
doi: 10.1177/1523422319869915 |
| 3 | ZHANG Y, WANG J W, YUAN B. Research on multi-satellite observation multi-region task planning based on genetic algorithm[C]//Proc.of the 3rd International Conference on Aerospace Technology, Communications and Energy Systems, 2019. |
| 4 | BAI X S , CAO M , YAN W S , et al. Efficient Heuristic algorithms for single-vehicle task planning with precedence constraints[J]. IEEE Trans.on Cybernetics, 2020, 4 (1): 1- 10. |
| 5 |
YAN F L . Gauss interference ant colony algorithm-based optimization of UAV mission planning[J]. The Journal of Supercomputing, 2020, 76 (2): 1170- 1179.
doi: 10.1007/s11227-018-2540-1 |
| 6 |
YAN F , ZHU X P , ZHOU Z , et al. Heterogeneous multi-unmanned aerial vehicle task planning: simultaneous attacks on targets using the Pythagorean hodograph curve[J]. Proceedings of the Institution of Mechanical Engineers, 2019, 233 (13): 4735- 4749.
doi: 10.1177/0954410019829368 |
| 7 |
YAO F , LI J T , CHEN Y N , et al. Task allocation strategies for cooperative task planning of multi-autonomous satellite constellation[J]. Advances in Space Research, 2019, 63 (2): 1073- 1084.
doi: 10.1016/j.asr.2018.10.002 |
| 8 |
赵国宏. 作战任务规划若干问题再认识[J]. 指挥与控制学报, 2017, 3 (4): 265- 272.
doi: 10.3969/j.issn.2096-0204.2017.04.0265 |
|
ZHAO G H . Some problems of combat mission planning[J]. Journal of Command and Control, 2017, 3 (4): 265- 272.
doi: 10.3969/j.issn.2096-0204.2017.04.0265 |
|
| 9 |
谢苏明, 毛万峰, 李杏. 关于作战筹划与作战任务规划[J]. 指挥与控制学报, 2017, 3 (4): 281- 285.
doi: 10.3969/j.issn.2096-0204.2017.04.0281 |
|
XIE S M , MAO W F , LI X . Combat planning and mission planning[J]. Journal of Command and Control, 2017, 3 (4): 281- 285.
doi: 10.3969/j.issn.2096-0204.2017.04.0281 |
|
| 10 | 王桐, 杨萍, 欧阳海波. 基于马尔可夫链的多波次导弹作战研究[J]. 战术导弹技术, 2011, (4): 20- 22. |
| WANG T , YANG P , OUYANG H B . Research on multi wave missile operations based on Markov chain[J]. Tactical Missile Technology, 2011, (4): 20- 22. | |
| 11 | 汪民乐, 房茂燕. 基于改进单亲GA的多波次攻击最优火力分配[J]. 系统仿真学报, 2009, 21 (23): 7697- 7702. |
| WANG M L , FANG M Y . Optimal fire distribution of multi wave attack based on improved single parent GA[J]. Journal of System Simulation, 2009, 21 (23): 7697- 7702. | |
| 12 | 汪宁丽, 王利平, 马豪杰, 等. 多波次导弹发射中的规划问题[J]. 数学的实践与认识, 2018, 48 (15): 247- 254. |
| WANG N L , WANG L P , MA H J , et al. Planning problems in multi-wave missile launching[J]. Practice and Understanding of Mathematics, 2018, 48 (15): 247- 254. | |
| 13 | 周梦源, 逯伯亮, 李海友, 等. 多波次导弹发射中的规划问题[J]. 数学的实践与认识, 2018, 48 (15): 265- 275. |
| ZHOU M Y , YUN B L , LI H Y , et al. Planning problems in multi-wave missile launching[J]. Mathematical Practice and Understanding, 2018, 48 (15): 265- 275. | |
| 14 | 孙茜. 多波次导弹发射中的规划问题[J]. 陕西理工大学学报(自然科学版), 2019, 35 (3): 81- 87. |
| SUN Q . Planning problems in multi-wave missile launching[J]. Journal of Shaanxi University of Science and Technology (Natural Science Edition), 2019, 35 (3): 81- 87. | |
| 15 |
周爽, 邱涛. 多波次导弹发射中的规划问题[J]. 农业装备与车辆工程, 2018, 56 (11): 52- 55, 60.
doi: 10.3969/j.issn.1673-3142.2018.11.012 |
|
ZHOU S , QIU T . Planning in multi-wave missile launch[J]. Agricultural Equipment and Vehicle Engineering, 2018, 56 (11): 52- 55, 60.
doi: 10.3969/j.issn.1673-3142.2018.11.012 |
|
| 16 | SURAFEL L T . Feasibility reduction approach for hierarchical decision making with multiple objectives[J]. Operations Research Perspectives, 2019, 35 (3): e21- e28. |
| 17 |
NAYAK S , OJHA A . On multi-level multi-objective linear fractional programming problem with interval parameters[J]. RAIRO-Operations Research, 2019, 53 (5): 1601- 1616.
doi: 10.1051/ro/2018063 |
| 18 | 高金伍.不确定多层规划模型与算法[D].北京: 清华大学, 2005. |
| GAO J W. Uncertain multilevel programming model and algorithm[D]. Beijing: Tsinghua University, 2005. | |
| 19 |
JANA D K , PRAMANIK S , MAITI M . Mean and CV reduction methods on Gaussian type-2 fuzzy set and its application to a multilevel profit transportation problem in a two-stage supply chain network[J]. Neural Computing and Applications, 2017, 28 (9): 2703- 2726.
doi: 10.1007/s00521-016-2202-2 |
| 20 |
REDDY D S , BABU K V G , MURTHY D L N , et al. Transportation planning aspects of a smart city-case study of GIFT city, gujarat[J]. Transportation Research Procedia, 2016, 17, 134- 144.
doi: 10.1016/j.trpro.2016.11.069 |
| 21 |
BRETT R A . Fixing the supply problem[J]. The Journal of Thoracic and Cardiovascular Surgery, 2018, 156 (3): 1037- 1037.
doi: 10.1016/j.jtcvs.2018.04.016 |
| 22 | LI J . Researchers at Hebei normal university have reported new data on chemical engineering (a multi-level programming for shale gas-water supply chains accounting for tradeoffs between economic and environmental concerns)[J]. Energy & Ecology, 2020, 4 (3): 69- 77. |
| 23 | CHEN Y Z , CHENG X , LI J , et al. A multi-level programming for shale gas-water supply chains accounting for tradeoffs between economic and environmental concerns[J]. Computers and Chemical Engineering, 2020, 135 (4): 35- 44. |
| 24 |
YANG H , MICHALE G H B . Transport bilevel programming problems: recent methodological advances[J]. Transportation Research: Part B, 2001, 35 (1): 1- 4.
doi: 10.1016/S0191-2615(00)00025-4 |
| 25 |
WU S H , YANG Z Z . Optimizing location of manufacturing industries in the context of economic globalization: a bi-level model based approach[J]. Physica A: Statistical Mechanics and its Applications, 2018, 501, 327- 337.
doi: 10.1016/j.physa.2018.02.042 |
| 26 | MERKLE D , MIDDENDORF M , DORIGO M , et al. Ant co-lony optimization 2004 MIT press 0-262-04219-3[J]. European Journal of Operational Research, 2004, 168 (1): 269- 271. |
| 27 |
ZITAR A , NUSEIRAT A F . Performance evaluation of genetic algorithms and evolutionary programming in optimization and machine learning[J]. Cybernetics and Systems, 2002, 33 (3): 203- 223.
doi: 10.1080/019697202753551611 |
| 28 | 邓键.双层规划若干问题的解法[D].吉林: 吉林大学, 2009. |
| DENG J. Solutions to some problems of bilevel programming[D]. Jilin: Jilin University, 2009. | |
| 29 |
EMMANOUIL E , ZACHARIADI S , CHRIS T , et al. A strategy for reducing the computational complexity of local search-based methods for the vehicle routing problem[J]. Computers and Operations Research, 2010, 37 (12): 2089- 2105.
doi: 10.1016/j.cor.2010.02.009 |
| 30 |
TAVAKKOLI M R , SAREMI A R , ZIAEE M S . A memetic algorithm for a vehicle routing problem with backhauls[J]. Applied Mathematics and Computation, 2006, 181 (2): 1049- 1060.
doi: 10.1016/j.amc.2006.01.059 |
| 31 | HORBULIN V P , HULIANYTSKYI L F , SERGIENKO I V . Optimization of UAV team routes in the presence of alternative and dynamic depots[J]. Cybernetics and Systems Analysis, 2020, 56 (8): 195- 203. |
| [1] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [2] | Jing YU, Enmi YONG, Hanyang CHEN, Dong HAO, Xiancai ZHANG. Bi-level mission planning method for multi-cooperative UAV air-to-ground attack [J]. Systems Engineering and Electronics, 2022, 44(9): 2849-2857. |
| [3] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [4] | Lu ZHUANG, Zhong LU, Haijing SONG, Jia ZHOU. An optimization method for development assurance level assignment of airborne system [J]. Systems Engineering and Electronics, 2022, 44(8): 2688-2698. |
| [5] | Tiansu LUO, Lingfeng ZHAO, Yunwen FENG, Xiaofeng XUE, Cheng LU. Super large-scale satellite constellation multi-level backup strategy based on METRIC theory [J]. Systems Engineering and Electronics, 2022, 44(7): 2181-2190. |
| [6] | Bo LI, Jiahao ZHOU, Minmin LIU, Pinchao ZHU. Feature selection for welding defect assessment based on improved NSGA3 [J]. Systems Engineering and Electronics, 2022, 44(7): 2211-2218. |
| [7] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [8] | Shaolong YANG, Jin HUANG, Xianbo XIANG, Weichao LI. Optimization of USV area coverage path planning based on confidence ellipsoid [J]. Systems Engineering and Electronics, 2022, 44(7): 2263-2269. |
| [9] | Yunwen FENG, Junyu CHEN, Cheng LU. Research on civil aircraft spare parts multi-region support network model [J]. Systems Engineering and Electronics, 2022, 44(5): 1553-1561. |
| [10] | Yuanjie LU, Zhimin LIU, Zhixiao SUN, Dong KAN. Model-based integrated evaluation of UAV system architecture [J]. Systems Engineering and Electronics, 2022, 44(4): 1239-1245. |
| [11] | Peng JIN, Xiaoxi TANG. Multi-satellite emergency task scheduling with merging mechanism [J]. Systems Engineering and Electronics, 2022, 44(4): 1270-1281. |
| [12] | Jianwei SUN, Chao WANG, Qingzhan SHI, Wenbo REN, Zekun YAO, Naichang YUAN. Intelligent optimization of phase-modulation waveform based on genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 722-729. |
| [13] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [14] | Weijian PANG, Hui LI, Qian HUANG, Peng LI, Xianming MA. Review on ontology-based task planning for unmanned systems [J]. Systems Engineering and Electronics, 2022, 44(3): 908-920. |
| [15] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||