Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (3): 908-920.doi: 10.12305/j.issn.1001-506X.2022.03.23
• Systems Engineering • Previous Articles Next Articles
Review on ontology-based task planning for unmanned systems
Weijian PANG1,2, Hui LI1,*, Qian HUANG1, Peng LI1, Xianming MA1
- 1. The Academy of Military Sciences, Beijing 100091, China
2. Beijing Aeronautical Engineering Technology Research Center, Beijing 100076, China
-
Received:2021-01-22Online:2022-03-01Published:2022-03-10 -
Contact:Hui LI
CLC Number:
Cite this article
Weijian PANG, Hui LI, Qian HUANG, Peng LI, Xianming MA. Review on ontology-based task planning for unmanned systems[J]. Systems Engineering and Electronics, 2022, 44(3): 908-920.
share this article

Fig.1
MEBN model for estimating emergency level of marine pollution"
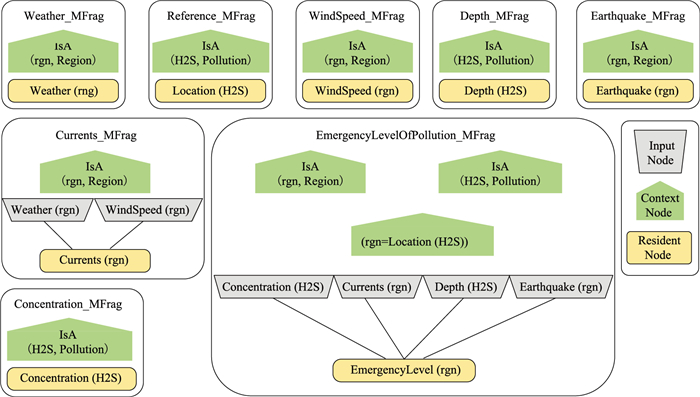
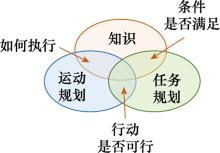
Fig.2
Relationship between knowledge and TMP"


Fig.3
Framework of ontology-based task planning"
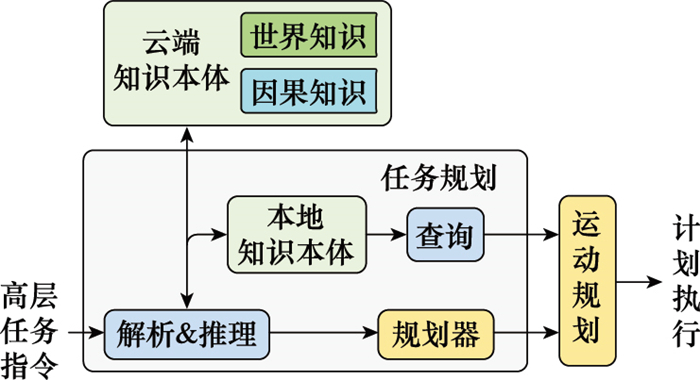
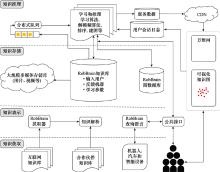
Fig.4
RoboBrain system architecture"

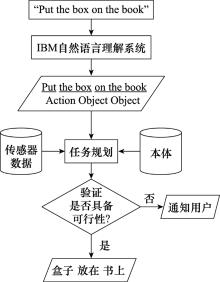
Fig.5
Intelligent planning flow chart with spatial intelligence"
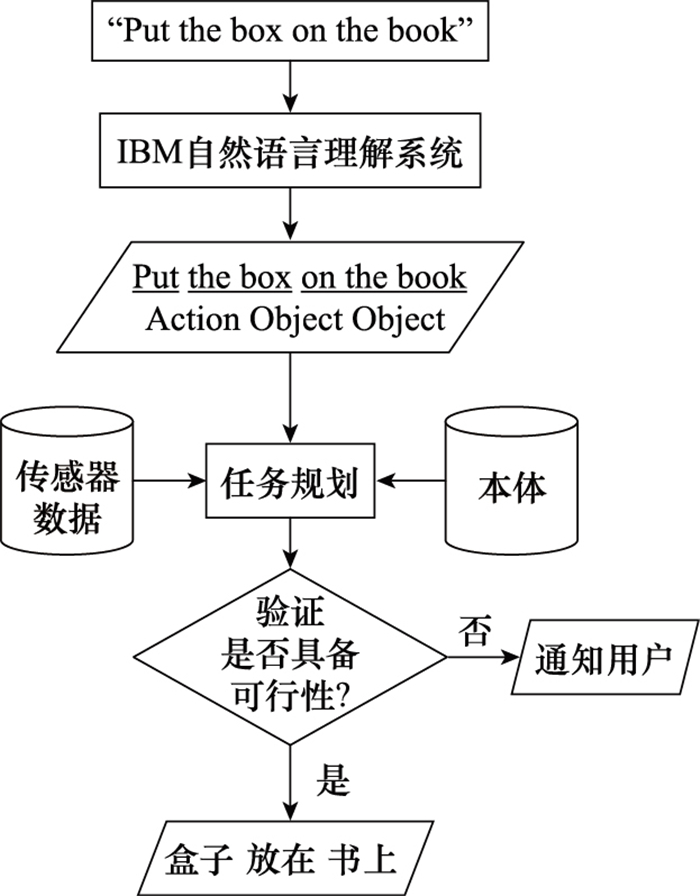

Fig.6
SWARMs ontology structure"
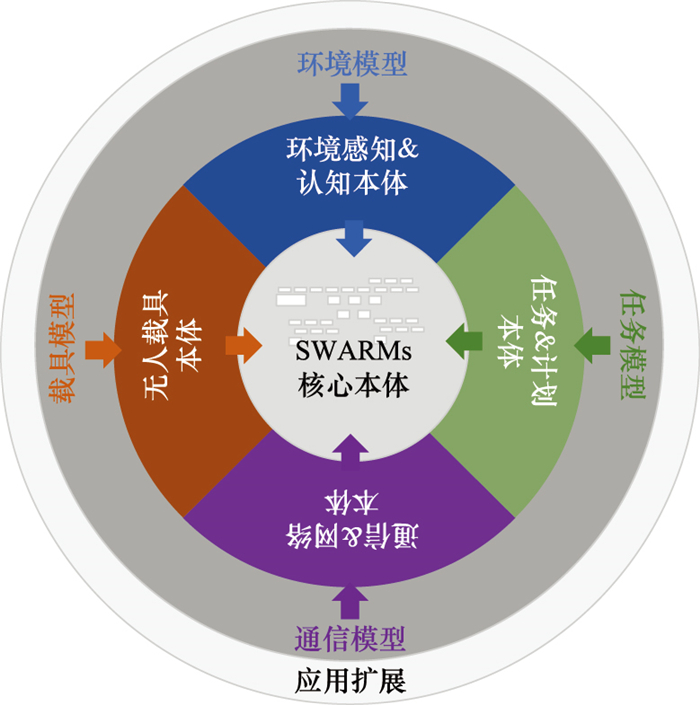
Table 1
Comparison of typical robotic ontologies"
| 名称 | 规模 | 应用领域 | 表示方法 | 知识推理 |
| RoboBrain | 超大规模 | 服务型机器人 | Graph structure | Robot Query Language (RQL) |
| KnowRob | 小型 | 服务型机器人 | Web OWL | SWI-prolog |
| RoboEarth | 大规模 | 服务型机器人 | OWL | Rapyuta |
| 文献[ | 小型 | 服务型机器人 | OWL | HermiT |
| ORO | 大型 | 机器人社区 | OWL | Pellet |
| PMK | 小型 | 机械臂 | OWL | SWI-prolog |
| RTPO | 小型 | 服务型机器人 | OWL | SWI-prolog |
| ICA | 小型 | 无人潜航器 | OWL | - |
| 空间站任务本体 | 小型 | 空间站 | OWL | - |
| SWARMs | 小型 | 海洋无人装备 | PR-OWL | Pellet |
| 无人驾驶汽车 | 小型 | 无人驾驶 | OWL | SWI-prolog |
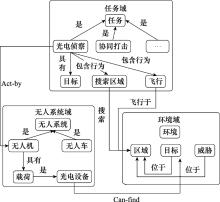
Fig.7
Mission ontology of unmanned system task"

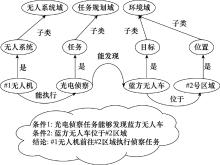
Fig.8
Diagram of knowledge inference process"

| 1 | 金伟, 周震博. 2018年无人机研发热点回眸[J]. 科技导报, 2019, 37 (1): 163- 172. |
| JIN W , ZHOU Z B . Review on frontier hotspots of unmanned aircraft systems in 2018[J]. Science & Technology Review, 2019, 37 (1): 163- 172. | |
| 2 | 段海滨, 申燕凯, 王寅, 等. 2018年无人机领域热点评述[J]. 科技导报, 2019, 37 (3): 82- 90. |
| DUAN H B , SHEN Y K , WANG Y , et al. Review of technological hot spots of unmanned aerial vehicle in 2018[J]. Science & Technology Review, 2019, 37 (3): 82- 90. | |
| 3 | 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 2版. 北京: 国防工业出版社, 2018. |
| SHEN L C , NIU Y F , ZHU H Y . Theories and methods of autonomous cooperative control for Multi-UAVs[M]. 2nd ed. Beijing: National Defense Industry Press, 2018. | |
| 4 | 邓长春, 籍长国, 李小奇. 无人机作战应用论[M]. 北京: 蓝天出版社, 2011. |
| DENG C C , JI C G , LI X Q . Operational applications theory of UAV[M]. Beijing: Blue Sky Press, 2011. | |
| 5 | 李梦晗, 汪子盛, 徐楠, 等. 国内外轻型地面无人平台研究现状及发展趋势分析[J]. 专用汽车, 2019, 271 (12): 56- 60. |
| LI M H , WANG Z S , XU N , et al. Analysis of the research status and development trend of light unmanned ground platform at home and abroad[J]. Special Purpose Vehicle, 2019, 271 (12): 56- 60. | |
| 6 | U.S. Army. Unmanned aircraft systems roadmap 2005-2030[R]. Washington D. C. : Office of the Secretary of Defense, 2005: 1-213. |
| 7 | 张阳, 司光亚, 王艳正. 无人机集群网电攻击行动协同目标分配建模[J]. 系统工程与电子技术, 2019, 41 (9): 2025- 2033. |
| ZHANG Y , SI G Y , WANG Y Z . Modeling of cooperation target allocation of the UAV swarm cyberspace attack action[J]. Systems Engineering and Electronics, 2019, 41 (9): 2025- 2033. | |
| 8 |
张阳, 司光亚, 王艳正. 无人集群作战建模与仿真综述[J]. 电子信息对抗技术, 2018, 33 (3): 30- 36.
doi: 10.3969/j.issn.1674-2230.2018.03.007 |
|
ZHANG Y , SI G Y , WANG Y Z . Review on modeling and simu- lation of unmanned swarm operation[J]. Electronic Information Warfare Technology, 2018, 33 (3): 30- 36.
doi: 10.3969/j.issn.1674-2230.2018.03.007 |
|
| 9 | 吴森堂. 导弹自主编队协同制导控制技术[M]. 北京: 国防工业出版社, 2015. |
| WU S T . Cooperative guidance & control of missiles autonomous formation[M]. Beijing: National Defense Industry Press, 2015. | |
| 10 |
MOUSAVI S , AFGHAH F , ASHDOWN J D , et al. Use of a quantum genetic algorithm for coalition formation in large-scale UAV networks[J]. Ad Hoc Networks, 2019, 87, 26- 36.
doi: 10.1016/j.adhoc.2018.11.008 |
| 11 | MENG H, XIN G Z. UAV route planning based on the genetic simulated annealing algorithm[C]//Proc. of the IEEE International Conference on Mechatronics and Automation, 2010: 788-793. |
| 12 | SHIN J J , BANG H . UAV path planning under dynamic threats using an improved PSO algorithm[J]. International Journal of Aerospace Engineering, 2020, 8820284. |
| 13 | 王和平, 柳长安, 李为吉. 基于蚁群算法的无人机任务规划[J]. 西北工业大学学报, 2005, 23 (1): 98- 101. |
| WANG H P , LIU C A , LI W J . An optimizing UAV(unmanned aerial vehicle) mission planning with ANT algorithm[J]. Journal of Northwestern Polytechnical University, 2005, 23 (1): 98- 101. | |
| 14 | 施孟佶. 复杂环境下多智能体一致性控制及其在协同飞行中的应用[D]. 成都: 电子科技大学, 2017. |
| SHI M J. Consensus control of multi-agent systems in complex environments and its applications in cooperative flight control of unmanned aerial vehicles[D]. Chengdu: University of Electronic Science and Technology of China, 2017. | |
| 15 | 菅垄. 面向一致性的多智能体系统事件触发控制和分布式优化研究[D]. 成都: 电子科技大学, 2019. |
| JIAN L. On event-triggered control and distributed optimization for consensus of multi-agent systems[D]. Chengdu: University of Electronic Science and Technology of China, 2019. | |
| 16 | NUGRAHA Y , CETINKAY A , HAYAKAW T , et al. Dynamic resilient network games with applications to multi-agent consensus[J]. IEEE Trans.on Control of Network Systems, 2020, 8 (1): 246- 259. |
| 17 | RAJPATHAK D G. Intelligent scheduling-a literature review[R]. Milton Keynes: Knowledge Media Institute, The Open University, 2001: 1-69. |
| 18 | BACCHUS F , KABANZA F . Using temporal logics to express search control knowledge for planning[J]. Artificial Intelligence, 2000, 116 (1/2): 123- 191. |
| 19 |
EROL K , NAU D S , SUBRAHMANIAN V S . On the complexity of domain-independent planning[J]. Artificial Intelligence, 1992, 56, 223- 254.
doi: 10.1016/0004-3702(92)90028-V |
| 20 | RUDI S V , RICHARD B , DIETER F . Knowledge enginee-ring: principles and methods[J]. Data & Knowledge Enginee-ring, 1998, 25, 161- 197. |
| 21 | 王琦文. 战场态势推理关键技术研究及应用[D]. 西安: 西安电子科技大学, 2018. |
| WANG Q W. Research and application of key techniques of battlefield situational reasoning[D]. Xi'an: Xidian University, 2018. | |
| 22 |
LI X , BILBAO S , TAMARAM M J B , et al. SWARMs onto-logy: a common information model for the cooperation of under- water robots[J]. Sensors, 2017, 17 (3): 569- 588.
doi: 10.3390/s17030569 |
| 23 |
YAZDANI F , BLUMENTHAL S , HUEBEL N , et al. Query-based integration of heterogeneous knowledge bases for search and rescue tasks[J]. Robotics and Autonomous Systems (RAS), 2019, 117, 80- 91.
doi: 10.1016/j.robot.2019.03.013 |
| 24 | CARLOS C I . Intelligent autonomy for unmanned marine vehicles[M]. Switzerland: Springer Cham, 2015. |
| 25 | GENG X L, LIANG H W, XU H, et al. Human-driver speed profile modeling for autonomous vehicle's velocity strategy on curvy paths[C]//Proc. of the IEEE Intelligent Vehicles Symposium, 2016: 755-760. |
| 26 |
SUN X L , ZHANG Y , CHEN J . RTPO: a domain knowledge base for robot task planning[J]. Electronics, 2019, 8 (10): 1105- 1124.
doi: 10.3390/electronics8101105 |
| 27 | BARTK R. On the boundary of planning and scheduling: a study[C]//Proc. of the 18th Workshop of the UK Planning and Scheduling Special Interest Group, 1999. |
| 28 | PEREZ A G, BENJAMINS V R. Overview of knowledge sharing and reuse components: ontologies and problem-solving methods[C]//Proc. of the IJCAI-99 Workshop on Ontologies and Problem-Solving Methods, 1999. |
| 29 |
FIKES R E , NILSSON N J . STRIPS: a new approach to the application of theorem proving to problem solving[J]. Artificial Intelligence, 1971, 2 (3-4): 189- 208.
doi: 10.1016/0004-3702(71)90010-5 |
| 30 |
WILKINS D E . Can AI planners solve practical problems?[J]. Computational Intelligence, 1990, 6 (4): 232- 246.
doi: 10.1111/j.1467-8640.1990.tb00297.x |
| 31 | PUTERMAN M . Markov decision processes: discrete stochastic dynamic programming[M]. New Jersey: John Wiley & Sons, 2014. |
| 32 | PEDNAULT E. ADL: exploring the middle ground between STRIPS and the situation calculus[C]//Proc. of the 1st International Conference on Principles of Knowledge Representation and Reasoning, 1989: 324-332. |
| 33 | GHALLAB M, KNOBLOCK C, WILKINS D, et al. PDDL-The planning domain definition language[R]. Connecticut: Yale Center for Computational Vision and Control, 1998: 1-26. |
| 34 |
FOX M , LONG D . PDDL2.1: an extension to PDDL for expressing temporal planning domains[J]. Journal of Artificial Intelligence Research, 2003, 20, 61- 124.
doi: 10.1613/jair.1129 |
| 35 | HERTLE A, DORNHEGE C, KELLER T, et al. Planning with semantic attachments: an object-oriented view[C]//Proc. of the 20th European Conference on Artificial Intelligence, 2012: 402-407. |
| 36 | NAU D S, GUPTA S K, REGLI W C. AI planning versus manufacturing-operation planning: a case study[R]. Cambridge: Harvard University, 1995: 1-8. |
| 37 | KNOBLOCK C A. Building a planner for information gathe-ring: a report from the trenches[C]//Proc. of the 3rd International Conference on Artificial Intelligence Planning Systems, 1996: 134-141. |
| 38 | AUSTIN T. Plan ontology-a working document[R]. Edinburgh: The University of Edinburgh, 1994. |
| 39 |
ANDRE VALENTE . Knowledge-level analysis of planning systems[J]. Sigart Bulletin, 1995, 6 (1): 33- 41.
doi: 10.1145/202187.202195 |
| 40 | YOLANDA G A G, JIM B. PLANET: a shareable and reusable ontology for representing plans[C]//Proc. of the AAAI Workshop on Representational Issues for Real-world Planning Systems, 2000. |
| 41 | RAJPATHAK D, MOTTA E. An ontological formalization of the planning task[C]//Proc. of the Ontological Formalization of the Planning Task, 2004: 305-346. |
| 42 | ENRICO M . Reusable components for knowledge modelling-principles and case studies in parametric design problem solving[M]. The Netherlands: IOS Press, 1999. |
| 43 | DEBORAH L, MCGUINNES S, HARMELEN F V. OWL web ontology language overview[R]. California: W3C Recommendation, 2004: 1-12. |
| 44 |
BOBILLO F , STRACCIA U . Fuzzy ontology representation using OWL2[J]. International Journal of Approximate Reaso-ning, 2011, 52 (7): 1073- 1094.
doi: 10.1016/j.ijar.2011.05.003 |
| 45 |
LI X , MARTINEZ J F , RUBIO G . A new fuzzy ontology development methodology (FODM) proposal[J]. IEEE Access, 2016, 4, 7111- 7124.
doi: 10.1109/ACCESS.2016.2621756 |
| 46 |
LASKEY K B . MEBN: a language for first-order Bayesian knowledge bases[J]. Artificial Intelligence, 2008, 172 (2-3): 140- 178.
doi: 10.1016/j.artint.2007.09.006 |
| 47 | CARVALHO R N, MATSUMOTO S, LASKEY K B, et al. Probabilistic ontology and knowledge fusion for procurement fraud detection in Brazil[M]. Uncertainty Reasoning for the Semantic Web Ⅱ. Heidelberg: Springer-Verlag, 2010. |
| 48 | CARVALHO R N, HABERLIN R, COSTA P C G, et al. Modeling a probabilistic ontology for maritime domain awareness[C]//Proc. of the 14th International Conference on Information Fusion, 2011. |
| 49 | FABIEN L , NEIL D , CAELAN G , et al. Platform-indepen-dent benchmarks for task and motion planning[J]. IEEE Robo-tics & Automation Letters, 2018, 3 (4): 3765- 3772. |
| 50 | CAMBON S, GRAVOT F, ALAMI R. A robot task planner that merges symbolic and geometric reasoning[C]//Proc. of the European Conference on Artificial Intelligence, 2004. |
| 51 | DORNHEGE C, EYERICH P, KELLER T, et al. Semantic attachments for domain-independent planning systems[C]//Proc. of the 19th International Conference on Automated Planning and Scheduling, 2009, 19-23. |
| 52 | GARRETT C R, LOZANO-PÉREZ T, KAELBLING L P. STRIPStream: integrating symbolic planners and blackbox samplers[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1802.08705. |
| 53 | DONG Y P, SU H, ZHU J, et al. Towards interpretable deep neural networks by leveraging adversarial examples[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1708.05493. |
| 54 | DONG Y P, LIAO F Z, PANG T Y, et al. Boosting adversarial attacks with momentum[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018. |
| 55 | 张钹, 朱军, 苏航. 迈向第三代人工智能[J]. 中国科学: 信息科学, 2020, 50 (9): 1281- 1302. |
| ZHANG B , ZHU J , SU H . Toward the third generation of artificial intelligence[J]. Scientia Sinica Informationis, 2020, 50 (9): 1281- 1302. | |
| 56 | 胡晓峰, 齐大伟. 智能决策问题探讨—-从游戏博弈到作战指挥, 距离还有多远[J]. 指挥与控制学报, 2020, 6 (4): 356- 363. |
| HU X F , QI D W . On problems of intelligent decision-making-how far is it from game-playing to operational command[J]. Journal of command and control, 2020, 6 (4): 356- 363. | |
| 57 | SAXENA A, JAIN A, SENER O, et al. RoboBrain: large-scale knowledge engine for robots[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1412.0691. |
| 58 | TENORTH M, BEETZ M. KnowRob-knowledge processing for autonomous personal robots[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2009, 4261-4266. |
| 59 | TENORTH M , BEETZ M . Representations for robot know-ledge in the KnowRob framework[J]. Artificial Intelligence, 2015, 247, 151- 169. |
| 60 | WAIBEL M , BEETZ M , CIVERA J , et al. RoboEarth-a world wide web for robots[J]. IEEE Robotics & Automation Magazine, 2011, 18 (2): 69- 82. |
| 61 | SALAM K A, MUNAWAR A. Knowledge engine for robots using ontology[C]//Proc. of the International Conference on Applied Computing and Information Technology, 2017: 25-28. |
| 62 |
AL-MOADHEN A , QIU R , PACKIANATHER M , et al. Integrating robot task planner with common-sense knowledge base to improve the efficiency of planning[J]. Procedia Computer Science, 2013, 22, 211- 220.
doi: 10.1016/j.procs.2013.09.097 |
| 63 | LEMAIGNAN S, ROS R, MOSENLECHNER L, et al. ORO, a knowledge management platform for cognitive architectures in robotics[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2010. |
| 64 |
LEMAIGNAN S . Grounding the interaction: knowledge mana-gement for interactive robots[J]. KI - Künstliche Intelligenz, 2013, 27 (2): 183- 185.
doi: 10.1007/s13218-013-0246-3 |
| 65 |
DIAB M , AKBARI A , UD D M , et al. PMK-a knowledge processing framework for autonomous robotics perception and manipulation[J]. Sensors, 2019, 19 (5): 1166- 1188.
doi: 10.3390/s19051166 |
| 66 |
WIELEMAKER J , SCHRIJVERS T , TRISKA M , et al. SWI-Prolog[J]. Theory and Practice of Logic Programming, 2012, 12 (1-2): 67- 96.
doi: 10.1017/S1471068411000494 |
| 67 |
卜慧蛟, 张进, 罗亚中, 等. 基于本体理论的空间站短期任务规划领域建模研究[J]. 载人航天, 2016, 22 (2): 191- 201.
doi: 10.3969/j.issn.1674-5825.2016.02.009 |
|
BU H J , ZHANG J , LUO Y Z , et al. Modeling of space station short-term mission planning domain based on ontology theory[J]. Manned Spaceflight, 2016, 22 (2): 191- 201.
doi: 10.3969/j.issn.1674-5825.2016.02.009 |
|
| 68 |
GENG X L , LIANG H W , YU B , et al. A scenario-adaptive driving behavior prediction approach to urban autonomous dri-ving[J]. Applied Sciences, 2017, 7 (4): 426- 447.
doi: 10.3390/app7040426 |
| 69 | HUANG L, LIANG H W, YU B, et al. Ontology-based dri-ving scene modeling: situation assessment and decision making for autonomous vehicles[C]//Proc. of the 4th Asia-Pacific Conference on Intelligent Robot Systems, 2019. |
| 70 |
CHEN Z X , ZHAO B L , ZHAO S J , et al. Learning and planning based on merged experience from multiple situations for a service robot[J]. Applied Sciences, 2018, 8 (10): 1832- 1849.
doi: 10.3390/app8101832 |
| 71 |
CHEN Z X , SONG C , YANG Y Y , et al. Robot navigation based on human trajectory prediction and multiple travel modes[J]. Applied Sciences, 2018, 8 (11): 2205- 2225.
doi: 10.3390/app8112205 |
| 72 | 李泚泚, 田国会, 路飞, 等. 面向服务机器人的物品知识自主构建方法[J]. 东南大学学报(自然科学版), 2020, 50 (2): 395- 401. |
| LI C C , TIAN G H , LU F , et al. Automatic construction method for object knowledge on service robots[J]. Journal of Southeast University (Natural Science Edition), 2020, 50 (2): 395- 401. | |
| 73 | ZERVAKIS L, TRYFONOPOULOS C, PAPADAKIS-PESARESI A, et al. Full-text support for Publish/Subscribe ontology systems[C]//Proc. of the European Semantic Web Confe-rence, 2016. |
| 74 | BAUMGARTNER N , GOTTESHEIM W , MITSCH S , et al. BeAware! -Situation awareness, the ontology-driven way[J]. Data & Knowledge Engineering, 2010, 69 (11): 1181- 1193. |
| 75 | 司成. 基于本体的网络威胁态势推演与评估技术研究[D]. 郑州: 中国人民解放军信息工程大学, 2015. |
| SI C. Research on network threat situation deduction and evaluation technology based on ontology[D]. Zhengzhou: Information Engineering University of the PLA, 2015. | |
| 76 | 黄玉奇. 基于贝叶斯网络和本体的态势估计方法[D]. 杭州: 杭州电子科技大学, 2012. |
| HUANG Y Q. A method of situation assessment based on bayesian network and Ontology[D]. Hangzhou: Hangzhou Dianzi University, 2012. | |
| 77 | WANG S, ZHANG Y, LIAO Z Y. Building domain-specific knowledge graph for unmanned combat vehicle decision making under uncertainty[C]//Proc. of the Chinese Automation Congress, 2019: 4718-4721. |
| 78 |
LENAT D . CYC: a large-scale investment in knowledge infrastructure[J]. Communications of the ACM, 1995, 38 (11): 33- 38.
doi: 10.1145/219717.219745 |
| 79 | TATE A . Towards a plan ontology[J]. Journal of the Italian Association of AI, 1996, 9 (1): 19- 26. |
| 80 | PEASE R A, CARRICO M. JTF ATD core plan representation[C]//Proc. of the AAAI Spring Symposium on Ontological Engineering, 1997: 24-26. |
| 81 | TATE A. Representing plans as a set of constraints-the <I-N-OVA>model[C]//Proc. of the 3rd International Conference on Artificial Intelligence Planning Systems, 1996: 221-228. |
| 82 |
TATE A . Roots of SPAR-shared planning and activity representation[J]. The Knowledge Engineering Review, 1998, 13 (1): 121- 128.
doi: 10.1017/S0269888998001064 |
| 83 | VAKEBTE A, BLYTHE J, GIL Y, et al. On the role of humans in enterprise control systems: the experience of INSPECT[C]//Proc. of the JFACC Symposium on Advances in Enterprise Control, 1999. |
| 84 | 黎鑫. 基于本体的作战方案任务完整性评估方法[D]. 长沙: 国防科学技术大学, 2017. |
| LI X. A method of mission integrity assessment based on onto-logy[D]. Changsha: National University of Defense Technology, 2017. | |
| 85 | MYERS K L . CPEF-a continuous planning and execution framework[J]. AI Magazine, 1999, 20 (4): 63- 69. |
| 86 | 刘园园. 水下机器人规划修复方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014. |
| LIU Y Y. Reasearch on planning repair for autonomous underwater vehicle[D]. Harbin: Harbin Engineering University, 2014. | |
| 87 |
邵天浩, 张宏军, 程恺, 等. 层次任务网络中的重新规划研究综述[J]. 系统工程与电子技术, 2020, 42 (12): 2833- 2846.
doi: 10.3969/j.issn.1001-506X.2020.12.21 |
|
SHAO T H , ZHANG H J , CHENG K , et al. Review of replanning in hierarchical task network[J]. System Engineering and Electronics, 2020, 42 (12): 2833- 2846.
doi: 10.3969/j.issn.1001-506X.2020.12.21 |
|
| 88 | 耿新力. 城区不确定环境下无人驾驶车辆行为决策方法研究[D]. 合肥: 中国科学技术大学, 2017. |
| GENG X L. Research on behavior decision-making approaches for autonomous vehicles in urban uncertainty environments[D]. Hefei: University of Science and Technology of China, 2017. | |
| 89 | 黄璐. 基于本体论的无人驾驶车辆场景评估与行为决策方法研究[D]. 合肥: 中国科学技术大学, 2019. |
| HUANG L. Research on ontology-based situation assessment and decision-making approach for autonomous vehicles[D]. Hefei: University of Science and Technology of China, 2019. | |
| 90 |
JIMÉNEZ S , DE L R T , FERNÁNDEZ S , et al. A review of machine learning for automated planning[J]. The Knowledge Engineering Review, 2012, 27 (4): 433- 467.
doi: 10.1017/S026988891200001X |
| 91 | ARORA A , FIORINO H , PELLIER D , et al. A review of learning planning action models[J]. The Knowledge Enginee-ring Review, 2018, 33. |
| 92 | BONET B, GEFFNER H. Learning first-order symbolic representations for planning from the structure of the state space[EB/OL]. [2021-01-15]. https://arxiv.org/abs/1909.05546. |
| 93 | BATEMAN J, BEETZ M, BESSLER D, et al. Heterogeneous ontologies and hybrid reasoning for service robotics: the EASE framework[C]//Proc. of the 3rd Iberian Robotics Conference, 2017: 417-428. |
| 94 | BESER D, CECIL J, FREEDMAN M, et al. A grounded approach to modeling generic knowledge acquisition[EB/OL]. [2021-01-15]. https://arxiv.org/abs/2105.03207. |
| 95 | 陈志贤. 面向复杂环境的服务机器人自主规划方法研究[D]. 深圳: 中国科学院大学(中国科学院深圳先进技术研究院), 2019. |
| CHEN Z X. Study on approaches of automated planning of service robot for complex environment[D]. Shenzhen: University of Chinese Academy of Sciences (Shenzhen Institutes of Advanced Technology), 2019. | |
| 96 | 李泚泚. 基于本体知识引导的家庭服务机器人抓取策略研究[D]. 济南: 山东大学, 2020. |
| LI C C. Research on object grasp strategies for home service robot guided by ontology knowledge[D]. Ji'nan: Shandong University, 2020. |
| [1] | Yiyang LUO, Qingsong ZHAO, Huachao LI, Yong LI, Jianbin SUN. Framework and modeling method of weaponry utilization knowledge [J]. Systems Engineering and Electronics, 2022, 44(3): 841-849. |
| [2] | Shuting WANG, Xiaobing LIU, Junhua ZHOU, Zhaoyang BAI, Xiang ZHAI. Ontology based knowledge representation and reuse method for complex product maintenance engineering cases [J]. Systems Engineering and Electronics, 2022, 44(2): 557-568. |
| [3] | Chen DONG, Yixian SHUAI, Jinpeng ZHOU, Peng LAI, Xianlei CHENG. Cooperative air defense task planning of networked multi-sensor-multi-weapon [J]. Systems Engineering and Electronics, 2022, 44(12): 3738-3746. |
| [4] | Chunyu HU, Weidong LIU, Tianxiang YU, Liyao ZHOU, Chen FENG. Analysis of multi wave task planning model based on UAV real-time data [J]. Systems Engineering and Electronics, 2021, 43(3): 747-754. |
| [5] | Xue SUN, Zhiqiu HUANG, Guohua SHEN, Jinyong WANG, Heng XU. Behavior decision method of autonomous vehicle based on ontology and BN [J]. Systems Engineering and Electronics, 2021, 43(2): 452-465. |
| [6] | Xuping GU, Daquan TANG. Multi-heterogeneous UAV task planning based on bacterial foraging algorithm [J]. Systems Engineering and Electronics, 2021, 43(11): 3312-3320. |
| [7] | Tianhao SHAO, Hongjun ZHANG, Kai CHENG, Chengyou DAI, Xiaohan YU, Ke ZHANG. Review of replanning in hierarchical task network [J]. Systems Engineering and Electronics, 2020, 42(12): 2833-2846. |
| [8] | HE Hongyue, WANG Zhixue, LIANG Haomo, WANG Qinglong. Approach to mission modeling and analysis for system of systems based on ontology [J]. Systems Engineering and Electronics, 2018, 40(9): 1973-1978. |
| [9] | CHENG Kai, CHEN Gang, YIN Chengxiang, KANG Ruizhi, KANG Xingdang. Core ontology modeling and reasoning method for course of action [J]. Systems Engineering and Electronics, 2018, 40(4): 805-814. |
| [10] | SUN Yufei, MA Liangli, LV Minhui, QIN Jiwei. Improved co-training based ontology matching method [J]. Systems Engineering and Electronics, 2017, 39(2): 459-464. |
| [11] | MA Hua-wei, ZHU Yi-min, HU Xiao-xuan. Cooperative task planning for ship and UAVs based on particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2016, 38(7): 1583-1588. |
| [12] | MAI Qiang, WANG Ning, AN Shi, WANG Zhao. Risk management knowledge base for aerospace engineering#br# based on Ontology-based semantic modeling [J]. Systems Engineering and Electronics, 2016, 38(10): 2331-2337. |
| [13] | SU Zheng-lian, YAN Jun, CHEN Hai-song, ZENG Yong-hua. Construction of ontology based equipment fault knowledge base [J]. Systems Engineering and Electronics, 2015, 37(9): 2067-2072. |
| [14] | LI Kang, LI Xin-ming, LIU Dong. Modeling method for weapon system of systems structure based on semantic meta-model [J]. Systems Engineering and Electronics, 2015, 37(11): 2503-2512. |
| [15] | TAN Xian-si,ZHU Gang,WANG Hong,BI Hong-kui,GAO Ting3. Joint demonstration meta-model based on IDEAS [J]. Systems Engineering and Electronics, 2015, 37(1): 85-92. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||