| 1 |
WENG H Y, YAO Y, HUANG D Y, et al. Rapid evaluation of rice neck blast resistance using low altitude remote sensing of UAV combined with YOLOv7[J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(21): 110−118.
|
| 2 |
PRADEEP P, SEBY A, SHANKAR R A, et al. Design of a fire-resistant attachment for quad-copter competent of unmanned firefighting[J]. Materials Today: Proceedings, 2023, 72 (6): 3163- 3171.
|
| 3 |
ZHANG H, PENG Y, LIU Y L. UAV aerial photography target detection based on improved YOLOv9[J]. The Journal of Super-computing, 2025, 81, 492.
|
| 4 |
GUO W, GONG Z, GAO C F, et al. An accurate monitoring method of peanut southern blight using unmanned aerial vehicle remote sensing[J]. Precision Agriculture, 2024, 25 (4): 1857- 1876.
doi: 10.1007/s11119-024-10137-w
|
| 5 |
JIANG Y, XU X X, ZHENG M Y, et al. Evolutionary computation for unmanned aerial vehicle path planning: a survey[J]. Artificial Intelligence Review, 2024, 57(10): 267−295.
|
| 6 |
YANG C, YANG H, ZHU D L, et al. A multi-mechanism balanced advanced learning sparrow search algorithm for UAV path planning[J]. Cluster Computing, 2024, 27 (5): 6623- 6666.
doi: 10.1007/s10586-024-04290-0
|
| 7 |
LI C J, ZHAO Q L, CHE C Y. 3D flight path planning for UAV based on improved particle swarm optimization algorithm[J]. IEEE Access, 2025, 13, 36637- 36646.
doi: 10.1109/ACCESS.2025.3543175
|
| 8 |
LI H, QIU Z P, HAN X Y, et al. UAV flight path planning optimization[J]. Telecommunication Systems, 2024, 87 (2): 329- 342.
doi: 10.1007/s11235-024-01167-w
|
| 9 |
GHAMBARI S, GOLABI M, JOURDAN L, et al. UAV path planning techniques: a survey[J]. Rairo-Operations Research, 2024, 58 (4): 2951- 2989.
doi: 10.1051/ro/2024073
|
| 10 |
ZHONG X Y, TIAN J, HU H S, et al. Hybrid path planning based on safe A* algorithm and adaptive window approach for mobile robot in large-scale dynamic environment[J]. Journal of Intelligent & Robotic Systems, 2020, 99 (1): 65- 77.
|
| 11 |
RIENECKER H, HILDEBRAND V, PFIFER H. Energy optimal 3D flight path planning for unmanned aerial vehicle in urban environments[J]. CEAS Aeronautical Journal, 2023, 14 (3): 621- 636.
doi: 10.1007/s13272-023-00666-x
|
| 12 |
XU Y, LI Y, TAI Y B, et al. A* algorithm based on adaptive expansion convolution for unmanned aerial vehicle path planning[J]. Intelligent Service Robotics, 2024, 17 (3): 521- 531.
doi: 10.1007/s11370-024-00536-3
|
| 13 |
SONNY A, YEDURI S R, CENKERAM-ADDI L R. Autonomous UAV path planning using modified PSO for UAV-assisted wireless networks[J]. IEEE Access, 2023, 11, 70353- 70367.
doi: 10.1109/ACCESS.2023.3293203
|
| 14 |
ZHEN X U, ZHANG E, CHEN Q. Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 130- 141.
|
| 15 |
CHEN D. Application of improved genetic algorithms in path planning[J]. Journal of Internet Technology, 2024, 25 (7): 1091- 1099.
doi: 10.70003/160792642024122507013
|
| 16 |
YANG K, GAN S K, SUKKARIEH S. An efficient path planning and control algorithm for RUAV’s in unknown and cluttered environments[J]. Journal of Intelligent & Robotic Systems, 2010, 57 (1/4): 101- 122.
|
| 17 |
HUANG C R, TANG B J, GUO Z Y, et al. Agile-RRT*: a faster and more robust path planner with enhanced initial solution and convergence rate in complex environments[J]. IEEE Access, 2024, 12, 58703- 58714.
doi: 10.1109/ACCESS.2024.3392926
|
| 18 |
CHEN S J, YANG G Y, CUI G H, et al. Improved path planning and controller design based on PRM[J]. IEEE Access, 2025, 13, 44156- 44168.
doi: 10.1109/ACCESS.2025.3548326
|
| 19 |
张海阔, 孟秀云. 基于改进RRT*算法的无人机在线航迹规划[J]. 系统工程与电子技术, 2024, 46 (12): 4157- 4164.
|
|
ZHANG H K, MENG X Y. UAV online trajectory planning based on improved RRT* algorithm[J]. Systems Engineering and Electronics, 2024, 46 (12): 4157- 4164.
|
| 20 |
HUANG Y, LEE H H. Adaptive informed RRT*: asymptotically optimal path planning with elliptical sampling pools in narrow passages[J]. International Journal of Control Automation and Systems, 2024, 22 (1): 241- 251.
doi: 10.1007/s12555-022-0834-9
|
| 21 |
KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761
|
| 22 |
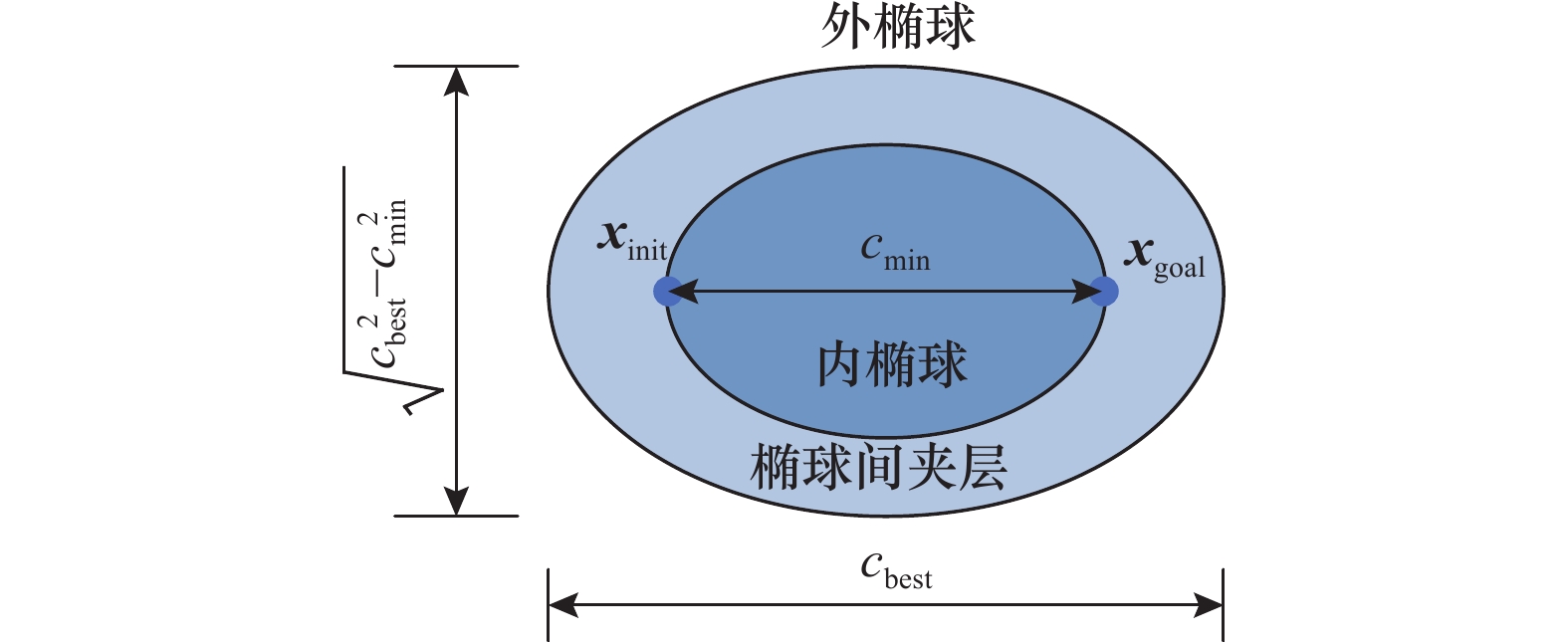
GAMMELL J D, SRINIVASA S S, BARFOOT T D. Informed RRT*: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014: 2997−3004.
|
| 23 |
MIAO Y J, LIU H Y, ZHANG Z Q, et al. Leveraging RRT*: probabilistically interpreted mechanisms enhanced with P-HOPE and FLEX-OPT for complex path planning[J]. IEEE Access, 2025, 13, 15965- 15980.
doi: 10.1109/ACCESS.2025.3526195
|
| 24 |
RYU H, PARK Y. Improved informed RRT* using gridmap skeletonization for mobile robot path planning[J]. International Journal of Precision Engineering and Manufacturing, 2019, 20 (11): 2033- 2039.
doi: 10.1007/s12541-019-00224-8
|
| 25 |
陈丹, 谭钦, 徐哲壮. 基于采样点优化RRT算法的机械臂路径规划[J]. 控制与决策, 2024, 39 (8): 2597- 2604.
|
|
CHEN D, TAN Q, XU Z Z. Path planning of robot arm based on sampling point optimization RRT algorithm[J]. Control and Decision, 2024, 39 (8): 2597- 2604.
|
| 26 |
ZHANG L, HAN Y. AUV cluster path planning based on improved RRT* algorithm[J]. Chinese Journal of Ship Research, 2023, 18 (1): 43- 51.
|
| 27 |
王怀震, 高明, 王建华, 等. 基于改进RRT*-Connect算法的机械臂多场景运动规划[J]. 农业机械学报, 2022, 53 (4): 432- 440.
doi: 10.6041/j.issn.1000-1298.2022.04.045
|
|
WANG H Z, GAO M, WANG J H, et al. Multi scene motion planning of robotic arm based on improved RRT*-Connect[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53 (4): 432- 440.
doi: 10.6041/j.issn.1000-1298.2022.04.045
|
| 28 |
JIANG X K, WANG Z H, DONG C. A path planning algorithm based on improved RRT sampling region[J]. Computers, Materials & Continua, 2024, 80(3): 4303−4323.
|
| 29 |
LIU H Y, CHEN J X, FENG J X, et al. An improved RRT* UAV formation path planning algorithm based on goal bias and node rejection strategy[J]. Unmanned Systems, 2023, 11 (4): 317- 326.
doi: 10.1142/S2301385023500140
|
| 30 |
王海芳, 崔阳阳, 李鸣飞, 等. 基于改进RRT*FN的移动机器人路径规划算法[J]. 东北大学学报(自然科学版), 2022, 43 (9): 1217- 1225.
|
|
WANG H F, CUI Y Y, LI M F, et al. A mobile robot path planning algorithm based on improved RRT*FN[J]. Journal of Northeastern University (Natural Science), 2022, 43 (9): 1217- 1225.
|