
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (6): 1893-1904.doi: 10.12305/j.issn.1001-506X.2026.06.11
刘泽为( ), 庄鹏, 郑岱堃(), 袁俊泉, 马晓岩
), 庄鹏, 郑岱堃(), 袁俊泉, 马晓岩
收稿日期:2025-02-25
修回日期:2025-04-30
接受日期:2026-04-15
出版日期:2026-06-25
发布日期:2025-07-03
通讯作者:
郑岱堃
E-mail:2657640181@qq.com;zheng_af@163.com
作者简介:刘泽为(1998—),男,博士研究生,主要研究方向为雷达数据处理和信号处理
Zewei LIU(), Peng ZHUANG, Daikun ZHENG(), Junquan YUAN, Xiaoyan MA
Received:2025-02-25
Revised:2025-04-30
Accepted:2026-04-15
Online:2026-06-25
Published:2025-07-03
Contact:
Daikun ZHENG
E-mail:2657640181@qq.com;zheng_af@163.com
摘要:
雷达对多目标进行跟踪时,传统跟踪算法都是基于单帧递推思想进行实现的,只考虑多目标回波单帧信息,容易存在较大误差。为综合考虑目标的多帧信息,提出一种基于航迹随机集的多目标自适应航迹整体估计算法。首先基于航迹随机集生成观测区域内的多个航迹候选量测序列,而后对这些量测序列进行多项式时间序列分析并进行航迹整体估计,直接生成多目标运动轨迹。航迹随机集通过航迹假设思想能够同时考虑目标的多帧运动信息,大大降低杂波环境对多目标跟踪效果造成的影响;而航迹整体估计方法直接估计目标的整体航运动特性,其模型可随观测数据的到来实时调整变化,可以获得连续时间区间上任意时刻的目标状态。仿真结果表明,基于航迹随机集的多目标自适应航迹整体估计算法能够在杂波环境下对多目标进行有效跟踪,且相较于传统算法,该方法生成的整体航迹更为平滑且有着更好的多目标跟踪效果。
中图分类号:
刘泽为, 庄鹏, 郑岱堃, 袁俊泉, 马晓岩. 基于航迹随机集的多目标自适应航迹整体估计算法[J]. 系统工程与电子技术, 2026, 48(6): 1893-1904.
Zewei LIU, Peng ZHUANG, Daikun ZHENG, Junquan YUAN, Xiaoyan MA. Multi-objective adaptive trajectory-oriented estimation algorithm based on trajectory random finite set[J]. Systems Engineering and Electronics, 2026, 48(6): 1893-1904.

图1
基于多项式时间序列的TOE原理框图"
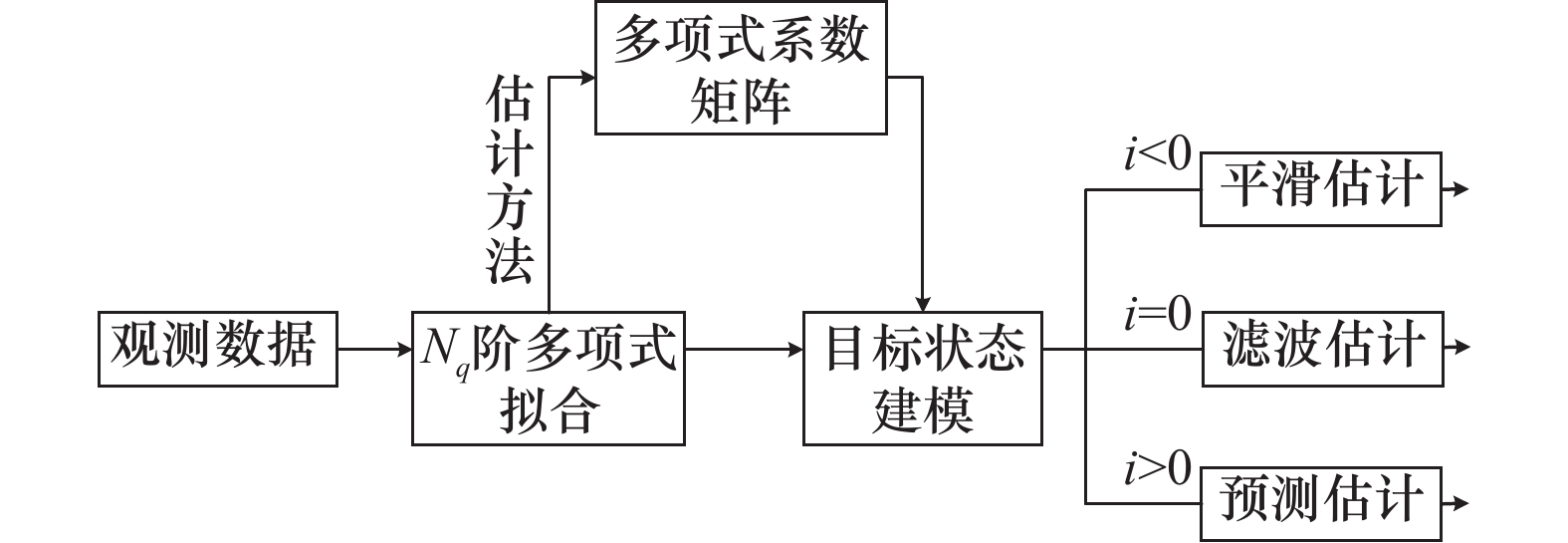
图2
基于RMSE分析的算法流程框图"
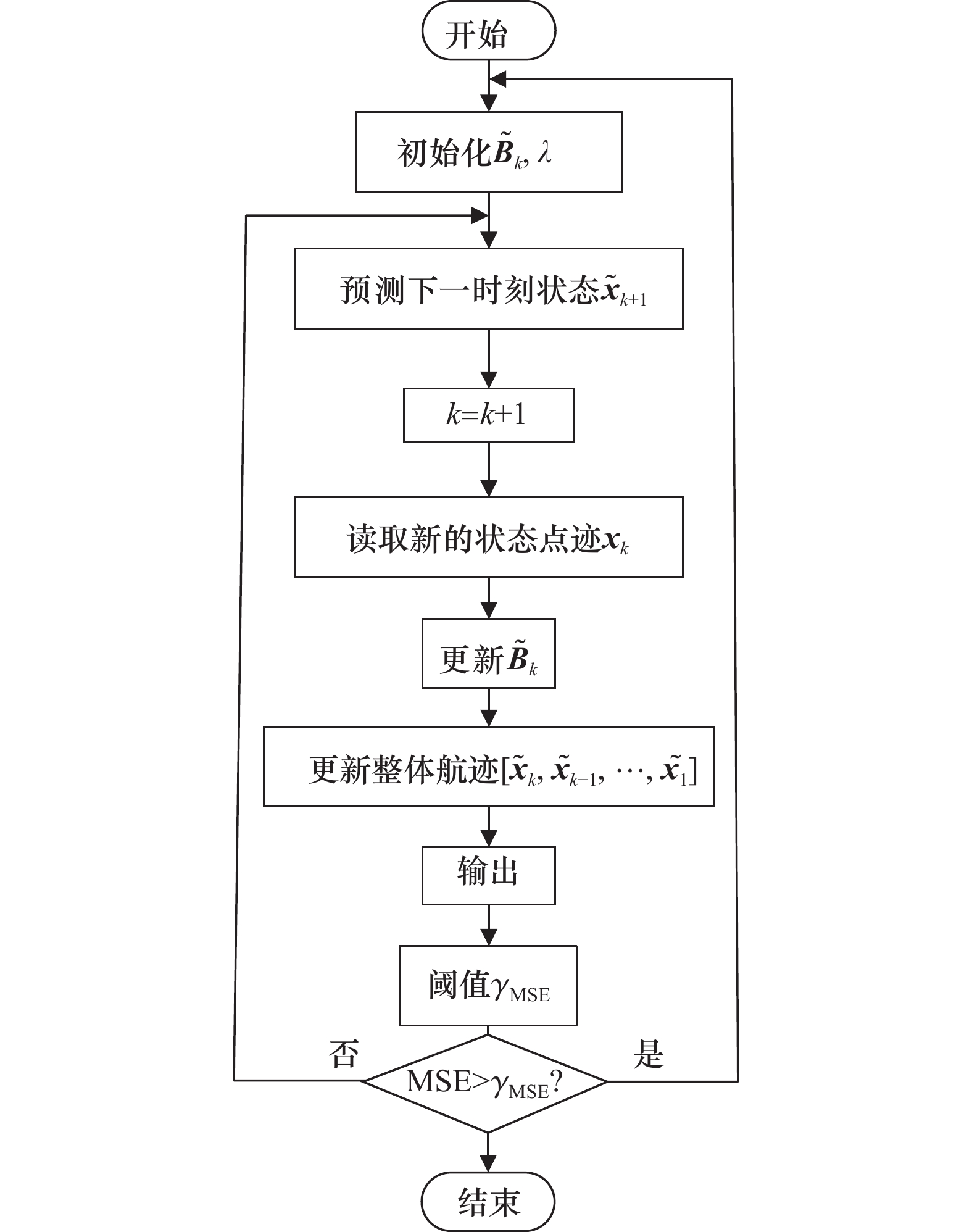
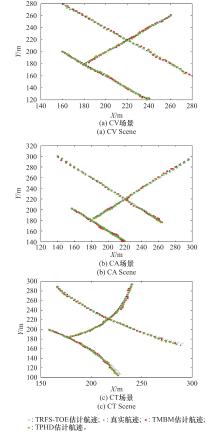
图3
不同运动场景下算法的跟踪效果对比"
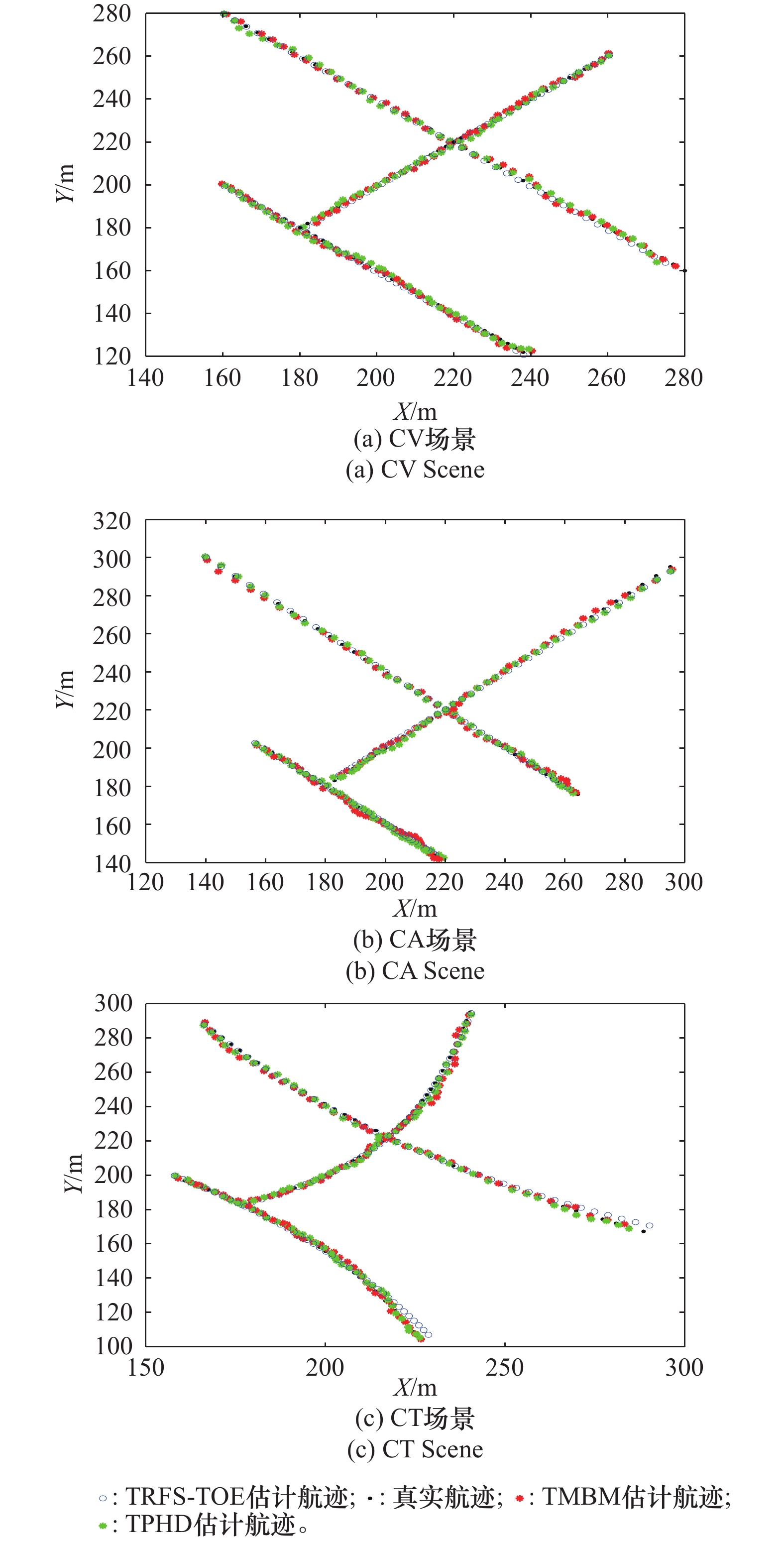
图4
CV场景下GOSPA距离误差对比"
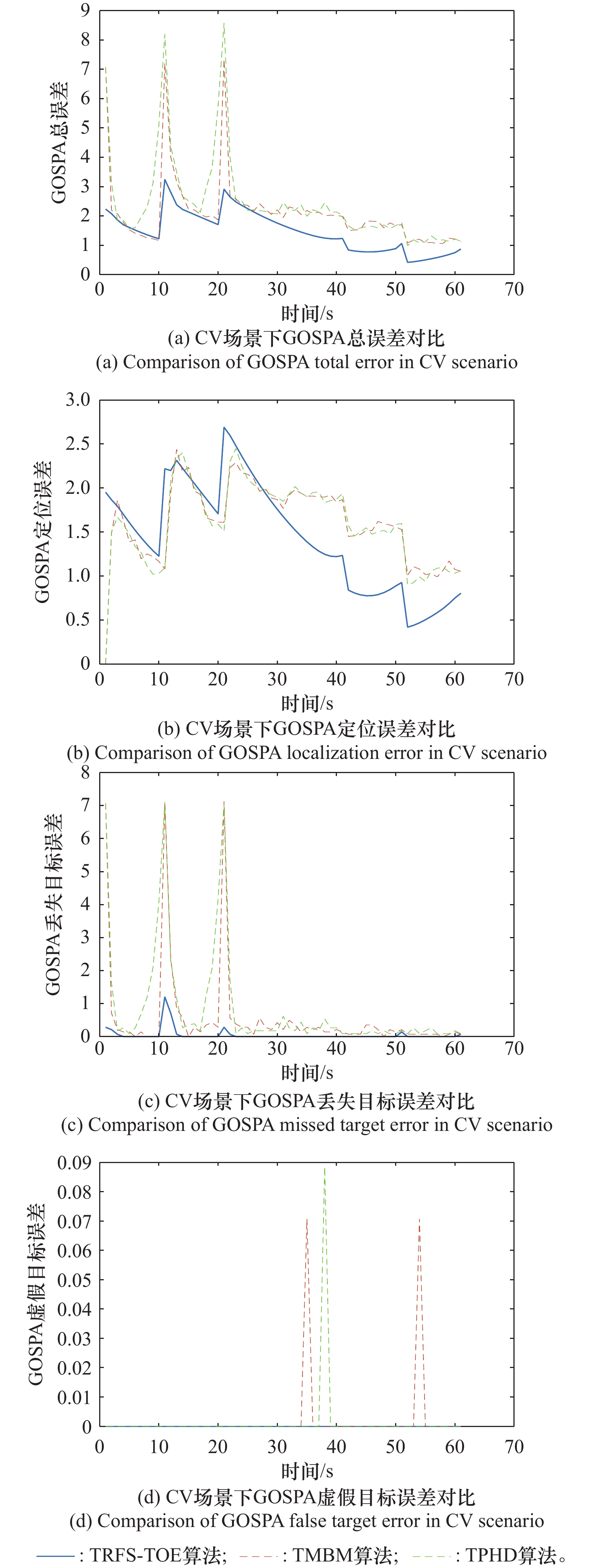
图5
CA场景下GOSPA距离误差对比"
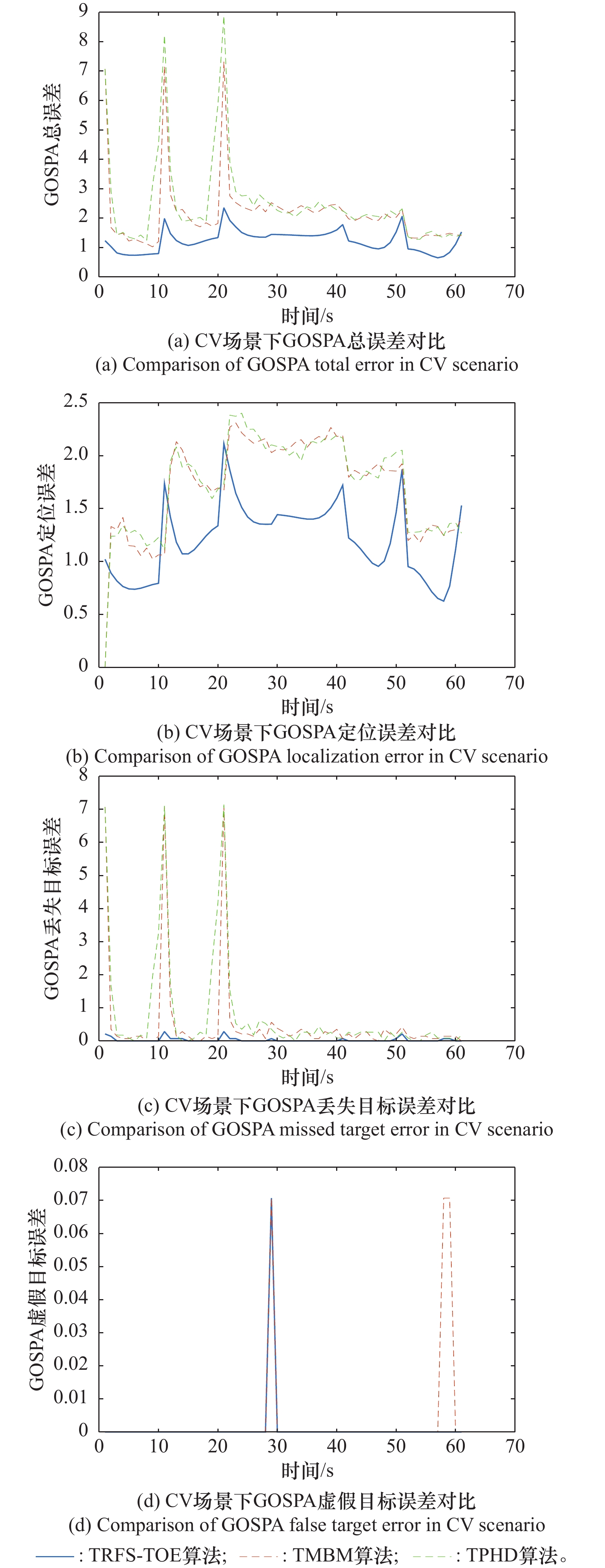
图6
CT场景下GOSPA距离误差对比"
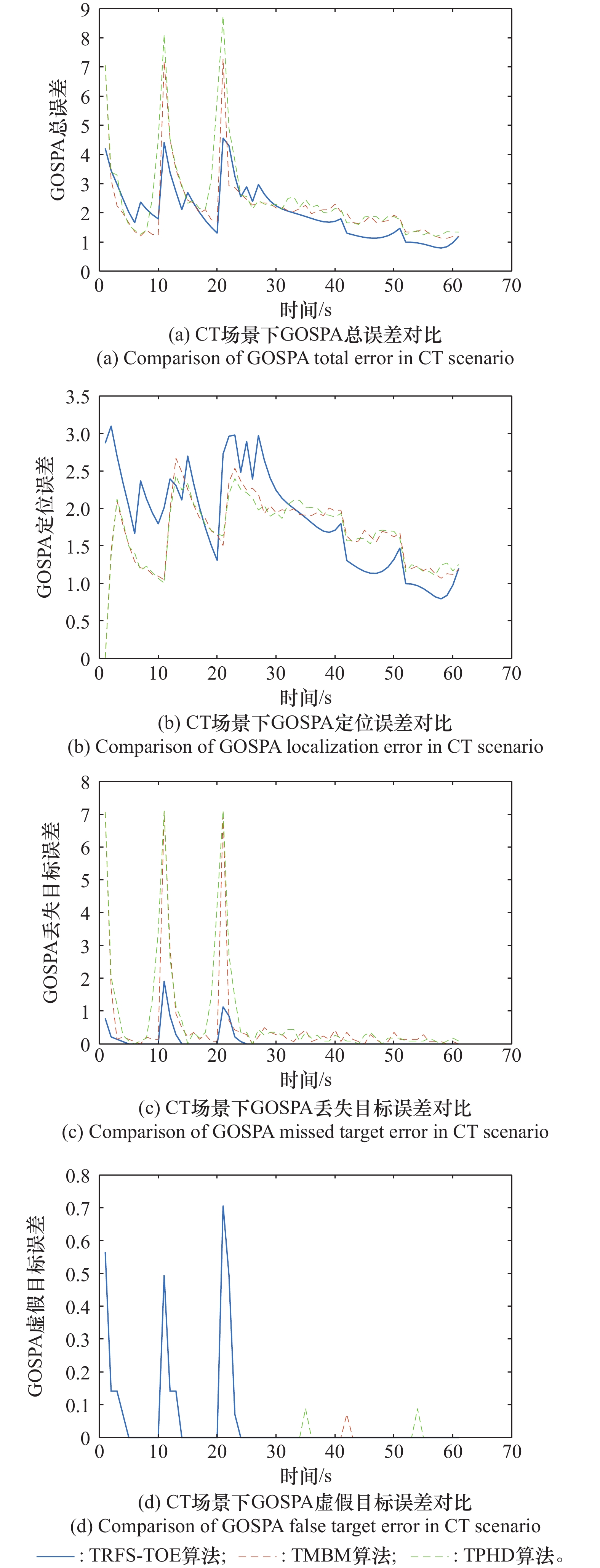
表1
CV场景下不同算法GOSPA距离误差均值比较"
| 跟踪方法 | CV场景下GOSPA距离误差均值 | |||
| GOSPA总误差 | 定位误差 | 丢失目标误差 | 虚假目标误差 | |
| TRFS-TOE算法 | 1.48 | 1.44 | 0.05 | 0 |
| TMBM算法 | 2.19 | 1.61 | 0.59 | 0.01 |
| TPHD算法 | 2.46 | 1.60 | 0.86 | 0.01 |
表2
CA场景下不同算法GOSPA距离误差均值比较"
| 跟踪方法 | CA场景下GOSPA距离误差均值 | |||
| GOSPA总误差 | 定位误差 | 丢失目标误差 | 虚假目标误差 | |
| TRFS-TOE算法 | 1.23 | 1.20 | 0.03 | 0.01 |
| TMBM算法 | 2.24 | 1.71 | 0.53 | 0.01 |
| TPHD算法 | 2.51 | 1.73 | 0.78 | 0.01 |
表3
CT场景下不同算法GOSPA距离误差均值比较"
| 跟踪方法 | CT场景下GOSPA距离误差均值 | |||
| GOSPA总误差 | 定位误差 | 丢失目标误差 | 虚假目标误差 | |
| TRFS-TOE算法 | 1.99 | 1.84 | 0.11 | 0.05 |
| TMBM算法 | 2.30 | 1.69 | 0.61 | 0.01 |
| TPHD算法 | 2.54 | 1.68 | 0.85 | 0.01 |
| 1 | FURGALE P, BARFOOT T D, SIBLEY G. Continuous-time batch estimation using temporal basis functions[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2012: 2088−2095. |
| 2 |
SINGPURWALLA N D, POLSON N G, SOYER R. From least squares to signal processing and particle filtering[J]. Technometrics, 2018, 60 (2): 146- 160.
doi: 10.1080/00401706.2017.1341341 |
| 3 | FAN J, YAO Q. Nonlinear time series: nonparametric and parametric methods[M]. New York: Springer, 2003. |
| 4 |
DELONG A, OSOKIN A, ISACK H N, et al. Fast approximate energy minimization with label costs[J]. International Journal of Computer Vision, 2012, 96 (1): 1- 27.
doi: 10.1109/cvpr.2010.5539897 |
| 5 |
EI-HAWARY F, JING Y. Robust regression-based EKF for tracking underwater targets[J]. IEEE Journal of Oceanic Engineering, 1995, 20 (1): 31- 41.
doi: 10.1109/48.380248 |
| 6 |
DIMATTEO I, GENOVESE C R, KASS R E. Bayesian curve-fitting with free-knot splines[J]. Biometrika, 2001, 88 (4): 1055- 1071.
doi: 10.1093/biomet/88.4.1055 |
| 7 |
MILAN A, SCHINDLER K, ROTH S. Multi-target tracking by discrete-continuous energy minimization[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2016, 38 (10): 2054- 2068.
doi: 10.1109/TPAMI.2015.2505309 |
| 8 | WANG X, HAN C Z. Turn rate estimation based on curve fitting in maneuvering target tracking[C]. Proc. of the 42nd Southeastern Symposium on System Theory, 2010: 194−196. |
| 9 | LIU Y, SUO J, KARIMI H R, et al. A Filtering algorithm for maneuvering target tracking based on smoothing spline fitting[J]. Abstract and Applied Analysis, 2014: 1−6. |
| 10 | ABUTALEB A S. Trajectory estimation of manoeuvring re-entry vehicles and non-linear filtering[J]. International Journal of Control, 1987, 46 (5): 1653- 1670. |
| 11 |
王正明, 朱炬波. 弹道跟踪数据的节省参数模型及应用[J]. 中国科学E辑, 1999, 29 (2): 146- 154.
doi: 10.3969/j.issn.1674-7259.1999.02.008 |
|
WANG Z M, ZHU J B. Saving parameter model and its application for ballistic tracking data[J]. Science in China Series E: Technological Sciences, 1999, 29 (2): 146- 154.
doi: 10.3969/j.issn.1674-7259.1999.02.008 |
|
| 12 |
ANDERSON-SPRECHER R, LENTH R V. Spline estimation of paths using bearings-only tracking data[J]. Journal of the American Statistical Association, 1996, 91 (433): 276- 283.
doi: 10.1080/01621459.1996.10476686 |
| 13 |
朱炬波, 贺明科, 冉承其, 等. 自由节点样条函数平滑滤波技术[J]. 电子学报, 2004 (1): 135- 138.
doi: 10.3321/j.issn:0372-2112.2004.01.032 |
|
ZHU J B, HE M K, RAN C Q, et al. Smoothing filter technique of free-node spline function[J]. Acta Electronica Sinica, 2004 (1): 135- 138.
doi: 10.3321/j.issn:0372-2112.2004.01.032 |
|
| 14 |
LIU J L, ZHU J B, XIE M H. Trajectory estimation with multi-range-rate system based on sparse representation and spline model optimization[J]. Chinese Journal of Aeronautics, 2010, 23 (1): 84- 90.
doi: 10.1016/S1000-9361(09)60191-6 |
| 15 | LI T C, CORCHADO J M, CHEN H M, et al. Track a smoothly maneuvering target based on trajectory estimation[C]// Proc. of the 20th International Conference on Information Fusion, 2017. |
| 16 |
LI T C. Single-road-constrained positioning based on deterministic trajectory geometry[J]. IEEE Communications Letters, 2019, 23 (1): 80- 83.
doi: 10.1109/LCOMM.2018.2879478 |
| 17 | ZHUANG P. An improved nearest neighbor algorithm based on trajectory-oriented estimation[C]// Proc. of the 4th International Conference on Electronic Information Engineering and Computer, 2024: 983−986. |
| 18 | LI T C, WANG X X, LIANG Y, et al. A track-oriented approach to target tracking with random finite set observations[C]// Proc. of the International Conference on Control, Automation and Information Sciences, 2019. |
| 19 |
LI T C, CHEN H M, SUN S D, et al. Joint smoothing and tracking based on continuous-time target trajectory function fitting[J]. IEEE Trans. on Automation Science and Engineering, 2019, 16 (3): 1476- 1483.
doi: 10.1109/TASE.2018.2882641 |
| 20 |
LI T C, SONG Y, FAN H Q. From target tracking to targeting track: a data-driven yet analytical approach to joint target detection and tracking[J]. Signal Processing, 2023, 205, 108883.
doi: 10.1016/j.sigpro.2022.108883 |
| 21 |
庄鹏, 郑岱堃, 袁俊泉, 等. 面向时变机动目标的自适应航迹整体估计方法[J]. 空天预警研究学报, 2024, 38 (4): 241- 248.
doi: 10.3969/j.issn.2097-180X.2024.034.002 |
|
ZHUANG P, ZHENG D K, YUAN J Q, et al. Adaptive integrated trajectory estimation method for time-varying maneuvering targets[J]. Journal of Aerospace Early Warning Research, 2024, 38 (4): 241- 248.
doi: 10.3969/j.issn.2097-180X.2024.034.002 |
|
| 22 |
GARCÍA-FERNÁNDEZ Á F, SVENSSON L, MORELANDE M R. Multiple target tracking based on sets of trajectories[J]. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56 (3): 1685- 1707.
doi: 10.1109/TAES.2019.2921210 |
| 23 |
GARCÍA-FERNÁNDEZ Á F, SVENSSON L. Trajectory PHD and CPHD filters[J]. IEEE Trans. on Signal Processing, 2019, 67 (22): 5702- 5714.
doi: 10.1109/TSP.2019.2943234 |
| 24 | GARCÍA-FERNÁNDEZ Á F, RALPH J, HORRIDGE P, et al. Gaussian trajectory PMBM filter with nonlinear measurements based on posterior linearisation[C]// Proc. of the 25th International Conference on Information Fusion, 2022. |
| 25 |
GARCÍA-FERNÁNDEZ Á F, SVENSSON L, WILLIAMS J L, et al. Trajectory Poisson multi-Bernoulli filters[J]. IEEE Trans. on Signal Processing, 2020, 68, 4933- 4945.
doi: 10.1109/TSP.2020.3017046 |
| 26 | XIA Y X, GRANSTRÖM K, SVENSSON L, et al. Multi-scan implementation of the trajectory Poisson multi-Bernoulli mixture filter[C]// Proc. of the 22nd International Conference on Information Fusion, 2019, 14(2): 213−235. |
| 27 |
GARCÍA-FERNÁNDEZ Á F, WILLIAMS J L, GRANSTRÖM K, et al. Poisson multi-Bernoulli mixture filter: direct derivation and implementation[J]. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (4): 1883- 1901.
doi: 10.1109/TAES.2018.2805153 |
| 28 |
AKHTAR S, SETOODEH P, AHMED R, et al. A new strategy for combining nonlinear kalman filters with smooth variable structure filters[J]. IEEE Access, 2023, 11, 146262- 146281.
doi: 10.1109/ACCESS.2023.3346433 |
| 29 |
TIAN M C, CHEN Z M, WANG H F, et al. An intelligent particle filter for infrared dim small target detection and tracking[J]. IEEE Trans. on Aerospace and Electronic Systems, 2022, 58 (6): 5318- 5333.
doi: 10.1109/TAES.2022.3169447 |
| 30 | MAO H, ZHANG B, YANG J, et al. Labeled probability hypothesis density filtering for track-before-detect strategy[C]// Proc. of the 26th International Conference on Information Fusion, 2023. |
| 31 | 朱双磊, 陈华友, 张琦, 等. 加权几何平均组合预测方法对数均方误差的分解[J]. 北京航空航天大学学报, 2023, 3, 1- 20. |
| ZHU S L, CHEN H Y, ZHANG Q, et al. Decomposition of logarithmic mean square error for weighted geometric average combination forecasting method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 3, 1- 20. | |
| 32 | RU J, JILKOV V P, LI R X, et al. Sequential detection of target maneuvers[C]// Proc. of the 7th International Conference on Information Fusion, 2005. |
| 33 |
FU J B, SUN J P, LU S T, et al. Multiple hypothesis tracking based on the Shiryayev sequential probability ratio test[J]. Science China Information Sciences, 2016, 59 (12): 122306.
doi: 10.1007/s11432-016-5570-4 |
| 34 |
RU J F, JIKOV V P, LI R, et al. Detection of target maneuver onset[J]. IEEE Trans. on Aerospace and Electronic Systems, 2009, 45 (2): 536- 554.
doi: 10.1109/TAES.2009.5089540 |
| 35 | RU J, LI X R, JILKOV V P. Multiple-model detection of target maneuvers[C]// Proc. of the Conference on Optics & Photonics, 2005. |
| 36 | 张倩昀, 陈华友, 江立辉. 加权算术平均组合预测方法均方误差的分解[J]. 合肥学院学报(综合版), 2020, 37 (2): 7- 13. |
| ZHANG Q Y, CHEN H Y, JIANG L H. Decomposition of mean square error of weighted arithmetic mean combined forecasting method[J]. Journal of Hefei University(Comprehensive Ed), 2020, 37 (2): 7- 13. | |
| 37 | RAHMATHULLAH A S, GARCÍA-FERNÁNDEZ Á F, SVENSSON L. Generalized optimal sub-pattern assignment metric[C]// Proc. of the 20th International Conference on Information Fusion, 2017. |
| [1] | 傅嘉政, 郭玉霞, 张博祥, 柴雷, 易伟, 孔令讲. 基于TPHD与TCPHD滤波器的分布式多目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(9): 2828-2838. |
| [2] | 马晓萌, 邓东明, 沈永健, 丁金闪, 郝国卿. 基于单站无源运动定位的多目标跟踪方法[J]. 系统工程与电子技术, 2025, 47(8): 2549-2557. |
| [3] | 张洪源, 龚柏春, 韩飞, 孙玥, 宁昕. 复杂环境下天基无源协同多目标初始定轨方法[J]. 系统工程与电子技术, 2025, 47(5): 1404-1413. |
| [4] | 尚李娜, 董玫, 陈伯孝. 非均匀杂波环境下的低空多目标跟踪算法[J]. 系统工程与电子技术, 2025, 47(10): 3218-3227. |
| [5] | 潘超凡, 李润生, 胡庆, 包全福, 保永强. 基于惯性预测的遥感场景舰船多目标跟踪模型[J]. 系统工程与电子技术, 2025, 47(1): 41-51. |
| [6] | 单靖原, 卢雨, 凌寒羽. 鲁棒自适应的机载外辐射源雷达多目标跟踪算法[J]. 系统工程与电子技术, 2024, 46(9): 2902-2915. |
| [7] | 江林海, 龚柏春, 刘传凯, YANG Yang, 张仁勇. 天基分布式无源探测的空间多目标跟踪方法[J]. 系统工程与电子技术, 2024, 46(8): 2789-2797. |
| [8] | 姚思亦, 李万春, 高林, 张花国, 胡航玮. 基于分布式PMHT的多传感器多目标跟踪[J]. 系统工程与电子技术, 2024, 46(7): 2184-2190. |
| [9] | 卓娅玲, 李响, 左磊, 胡娟. 随机数据丢包情况下组网雷达功率分配算法[J]. 系统工程与电子技术, 2024, 46(6): 1957-1966. |
| [10] | 齐美彬, 庄硕, 胡晶晶, 杨艳芳, 胡元奎. 基于联合GLMB滤波器的可分辨群目标跟踪[J]. 系统工程与电子技术, 2024, 46(4): 1212-1219. |
| [11] | 曾舒雅, 饶彬. 基于动力学守恒定律的弹道目标关联方法[J]. 系统工程与电子技术, 2024, 46(2): 684-691. |
| [12] | 毕文豪, 周杰, 张安, 刘力. 杂波环境下基于最大熵模糊聚类的JPDA算法[J]. 系统工程与电子技术, 2023, 45(7): 1920-1927. |
| [13] | 刘政玮, 陈映, 鲁耀兵. 适用于多目标轨迹小角度交叉的PHD滤波器[J]. 系统工程与电子技术, 2023, 45(4): 982-990. |
| [14] | 安雷, 李召瑞, 吉兵. 杂波环境下可移动主被动传感器长时调度方法[J]. 系统工程与电子技术, 2023, 45(1): 165-174. |
| [15] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||