
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (9): 2971-2984.doi: 10.12305/j.issn.1001-506X.2025.09.18
• 系统工程 • 上一篇
闻雯, 时晨光( ), 周建江
), 周建江
收稿日期:2024-01-02
出版日期:2025-09-25
发布日期:2025-09-16
通讯作者:
时晨光
E-mail:scg_space@163.com
作者简介:闻 雯(2000—),男,硕士研究生,主要研究方向为无人机集群航迹规划、飞行器射频隐身基金资助:
Wen WEN, Chenguang SHI(), Jianjiang ZHOU
Received:2024-01-02
Online:2025-09-25
Published:2025-09-16
Contact:
Chenguang SHI
E-mail:scg_space@163.com
摘要:
针对现代战争中无人机(unmanned aerial vehicle,UAV)集群在多元威胁环境下的航迹规划及平台安全问题,提出UAV集群隐身航迹规划算法。首先,建立多元威胁环境模型。然后,结合UAV雷达散射截面设计考虑UAV航程、组网雷达探测概率、高射炮威胁概率的集群隐身航迹规划综合代价函数。在此基础上,以最小化UAV集群综合代价函数为优化目标,以满足航迹可行性判定及UAV集群动力学限制为约束条件,构建多元威胁环境下UAV集群隐身航迹规划优化模型。最后,采用改进A*算法对上述优化模型进行求解。仿真结果表明,与现有算法相比所提算法能够在保证各UAV航迹可行性及其动力学性能约束的条件下,有效降低UAV集群综合代价。所提算法能够达到提升集群航迹隐身性能的目的。
中图分类号:
闻雯, 时晨光, 周建江. 多元威胁环境下无人机集群隐身航迹规划算法[J]. 系统工程与电子技术, 2025, 47(9): 2971-2984.
Wen WEN, Chenguang SHI, Jianjiang ZHOU. Stealthy paths planning algorithm for UAV swarm in multiple-threat environment[J]. Systems Engineering and Electronics, 2025, 47(9): 2971-2984.
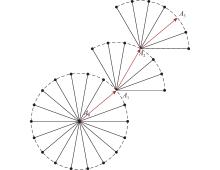
图1
无人机扩展搜索过程"
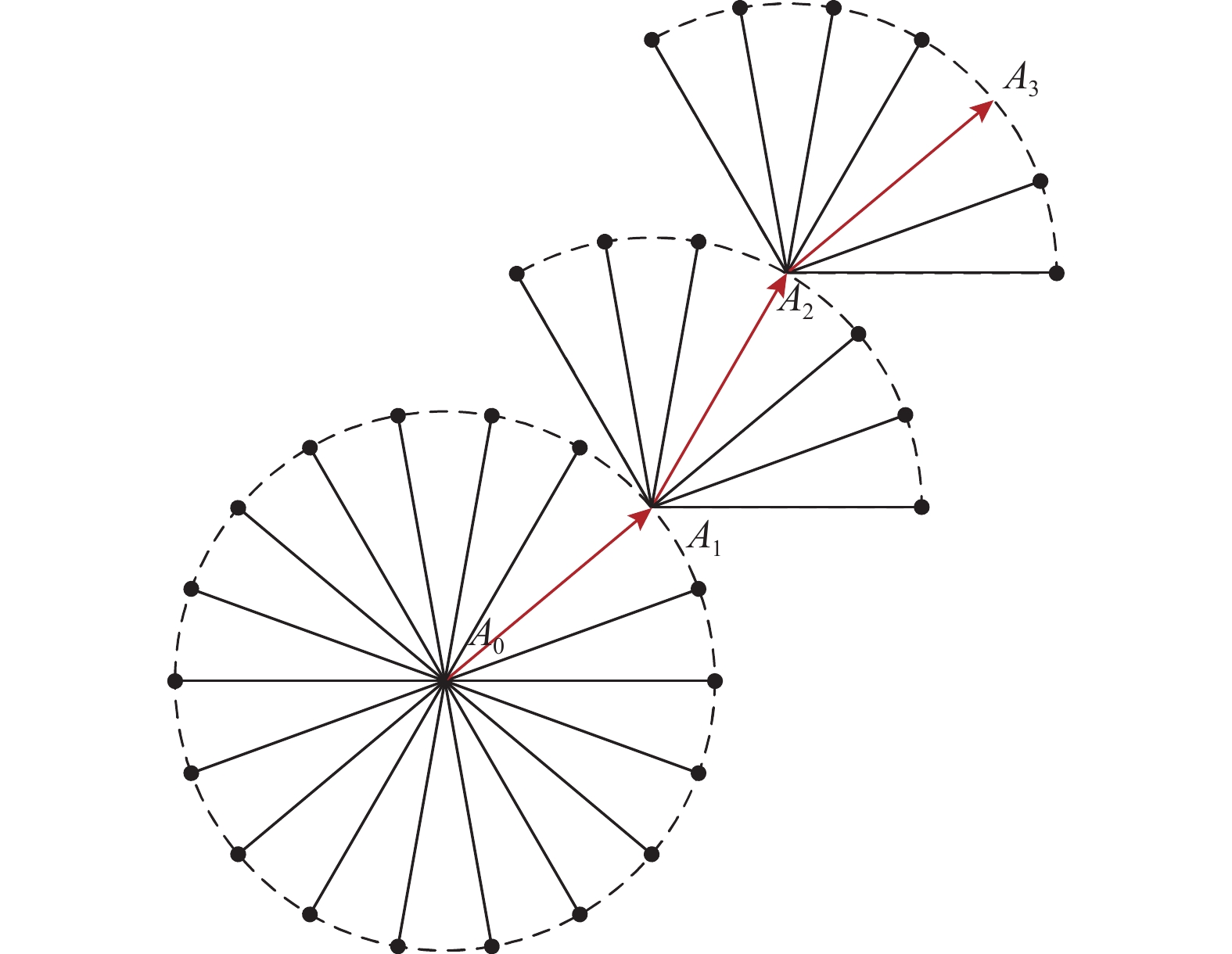
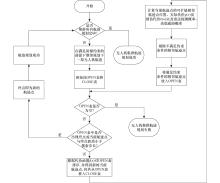
图2
无人机集群隐身航迹规划算法流程图"
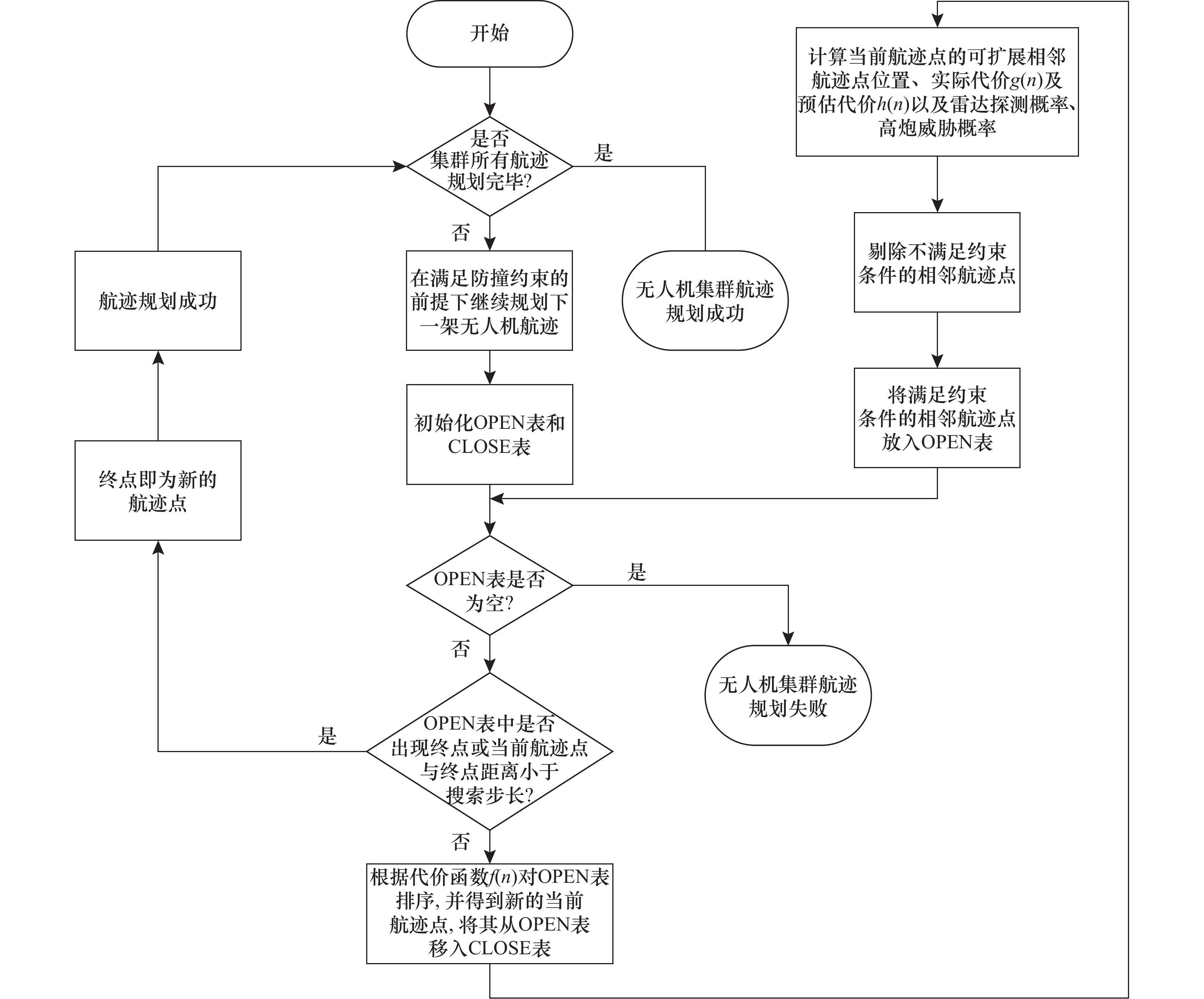
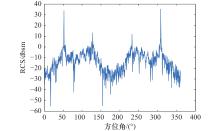
图3
无人机RCS分布"
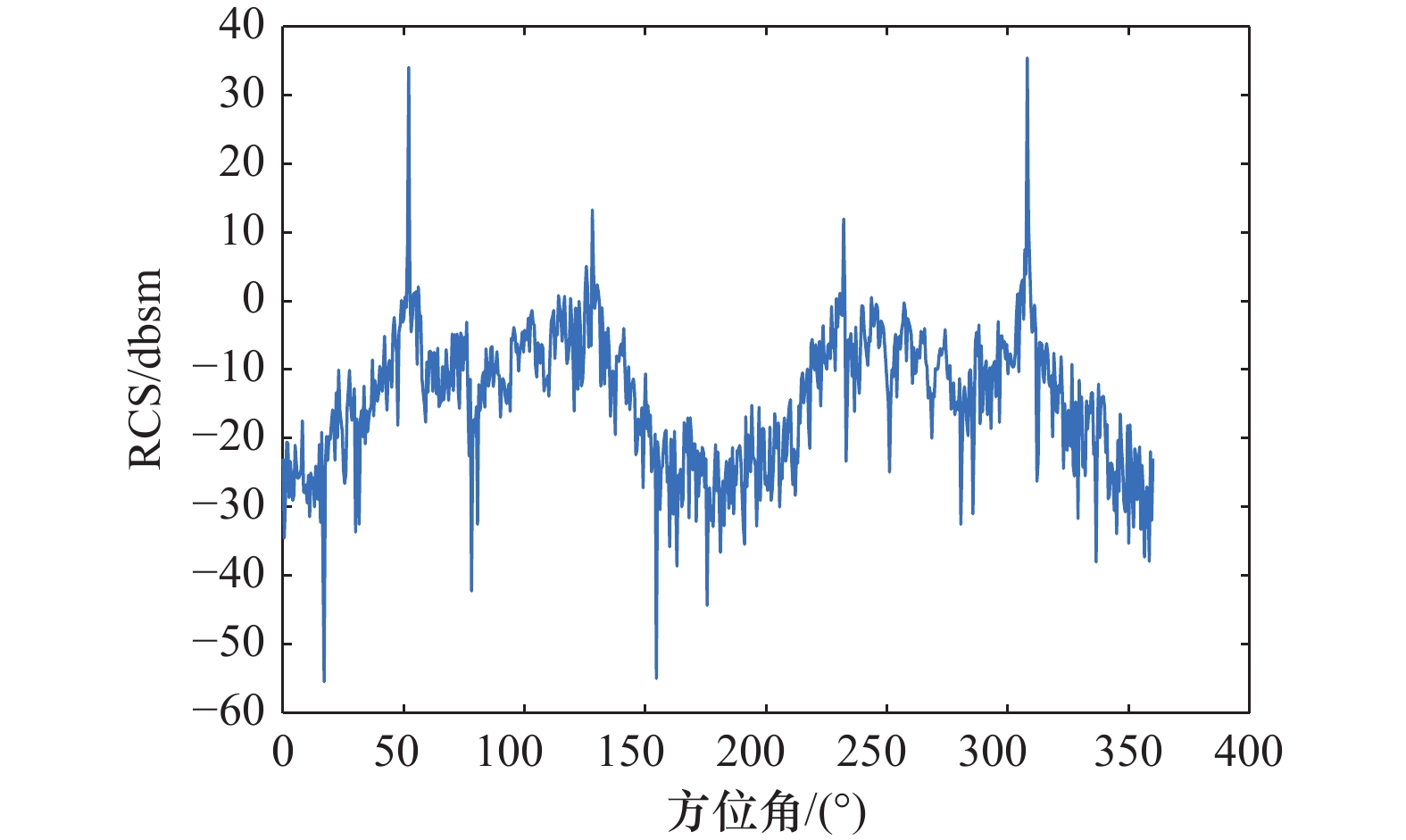
表1
无人机起点终点设置"
| 无人机编号 | 起点/km | 终点/km |
| 无人机1 | (5,18) | (70,85) |
| 无人机2 | (10,15) | (78,55) |
| 无人机3 | (5,25) | (90,77) |
| 无人机4 | (5,35) | (50,95) |
| 无人机5 | (20,10) | (89,40) |
| 无人机6 | (5,40) | (40,70) |
| 无人机7 | (25,5) | (95,70) |
| 无人机8 | (50,5) | (25,85) |
| 无人机9 | (70,15) | (5,60) |
| 无人机10 | (75,20) | (5,85) |
表2
雷达起点终点设置"
| 雷达编号 | 位置 |
| 雷达1 | (50,50) |
| 雷达2 | (25,50) |
| 雷达3 | (50,25) |
| 雷达4 | (25,25) |
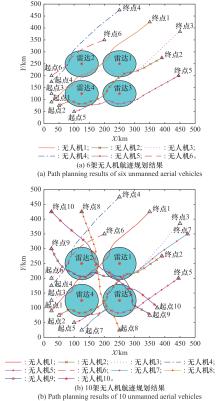
图4
场景1中无人机集群航迹规划结果"
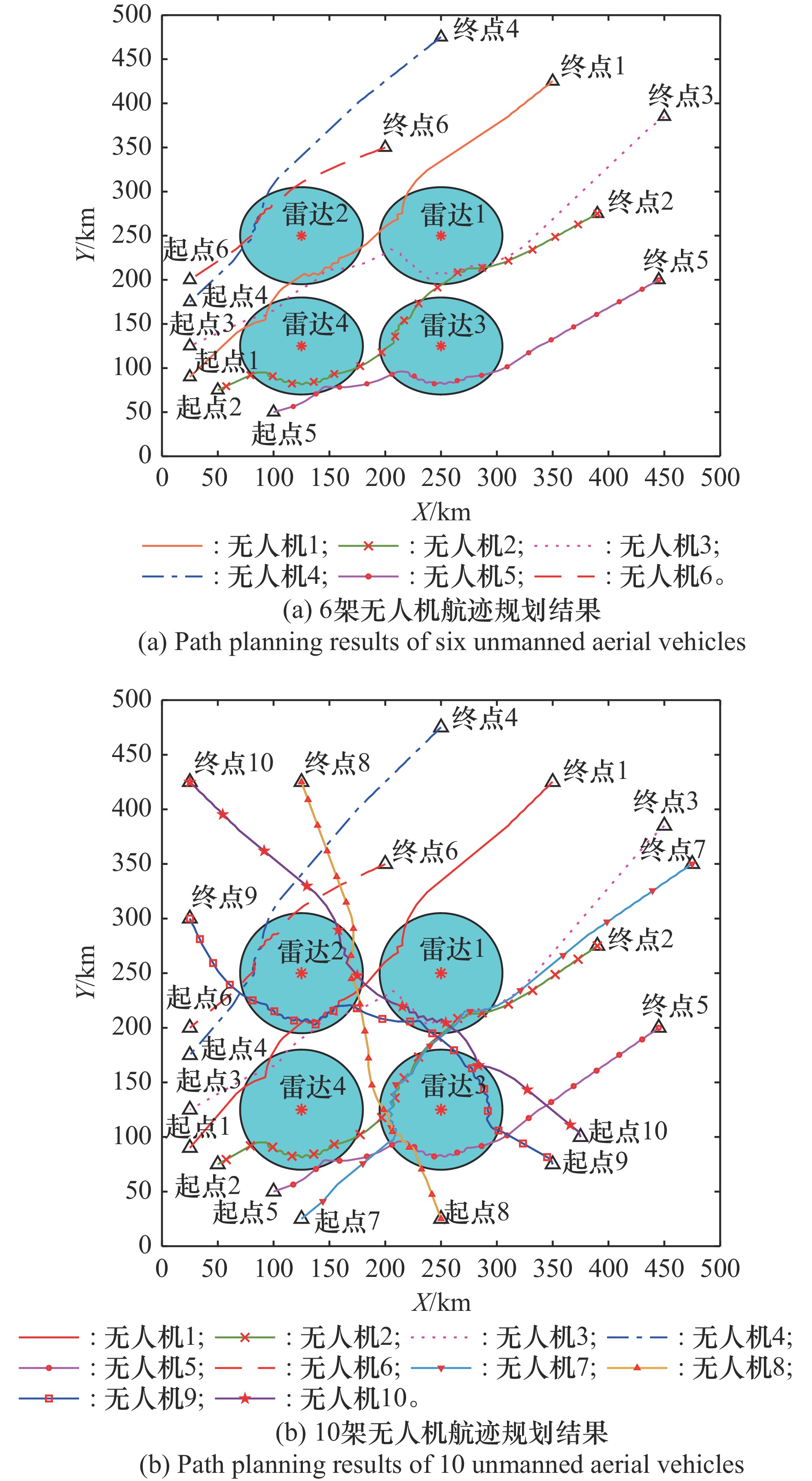

图5
场景1中6架无人机航向角变化"

图6
场景2中10架无人机航向角变化"


图7
场景1中组网雷达对无人机集群航迹探测概率变化"

图8
场景1中对比算法组网雷达对无人机集群航迹探测概率变化"
表3
场景1中对于6架无人机不同算法性能对比"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 78.16 | 7.74 | |
| 对比算法 | 108.73 | 9.31 |
表4
场景1中对于10架无人机不同算法性能对比"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 143.26 | 21.88 | |
| 对比算法 | 191.86 | 24.54 |
表5
固定障碍物范围"
| 固定障碍物编号 | 顶点1 | 顶点2 | 顶点3 | 顶点4 |
| 1 | (75,60) | (89,60) | (75,73) | (89,73) |
| 2 | (74,35) | (85,35) | (74,46) | (85,46) |
| 3 | (49,70) | (60,70) | (49,81) | (60,81) |

图9
场景2中无人机集群航迹规划结果"


图10
场景2中6架无人机航向角变化"

图11
场景2中10架无人机航向角变化"
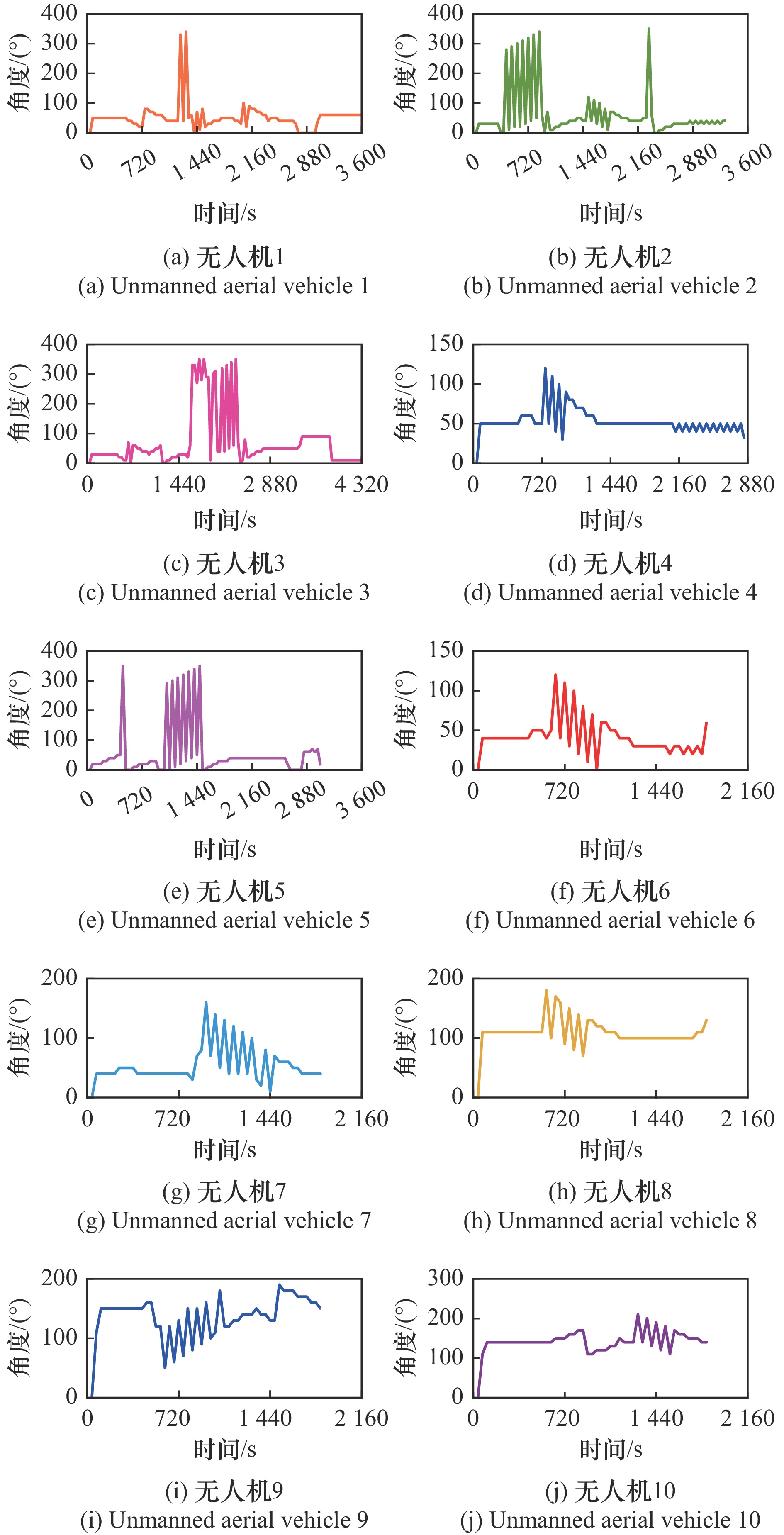
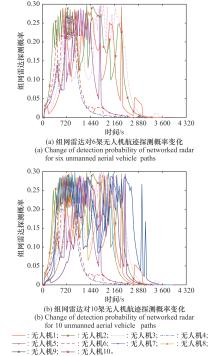
图12
场景2中组网雷达对无人机集群航迹探测概率变化"
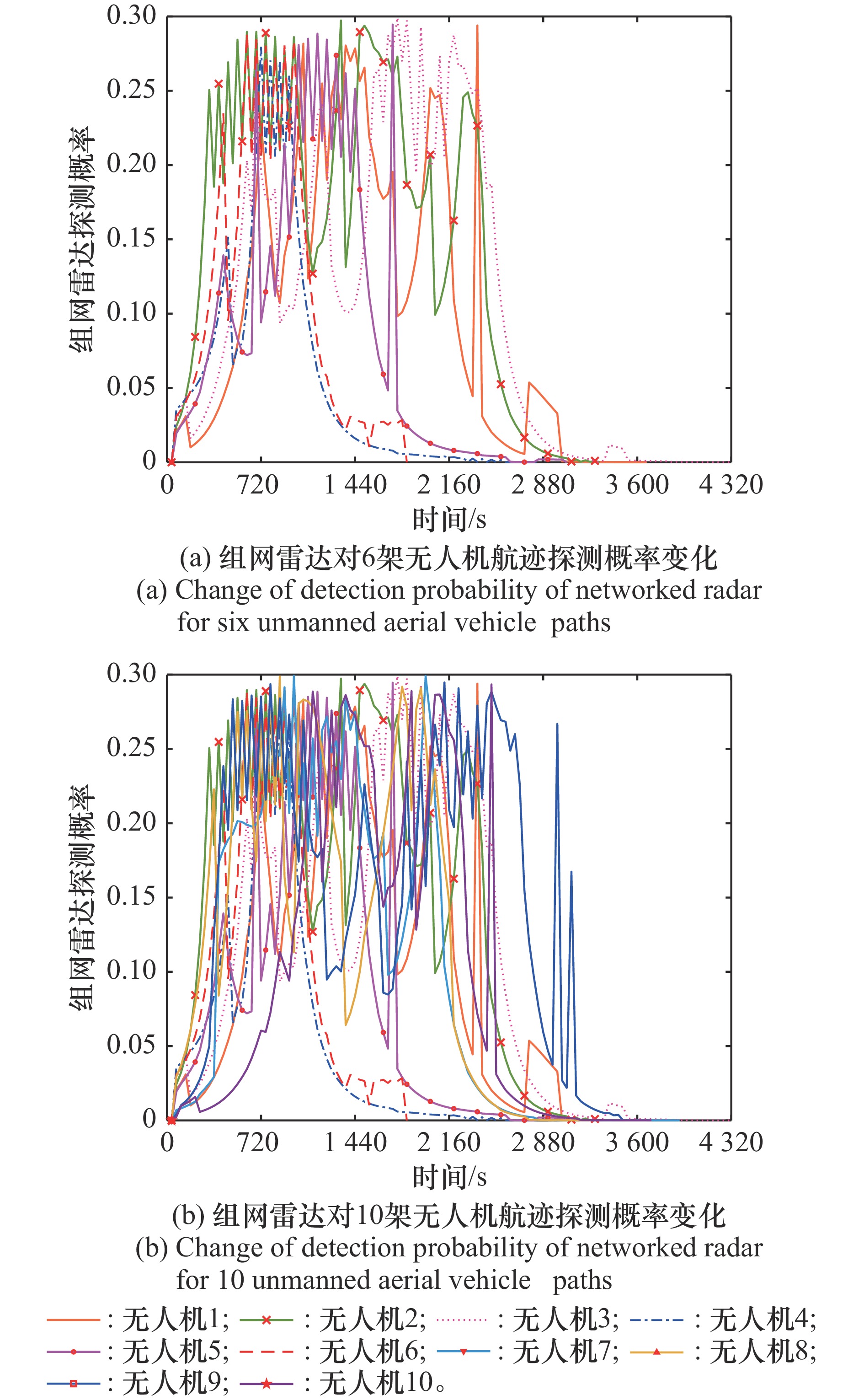

图13
场景2中对比算法组网雷达对无人机集群航迹探测概率变化"

表6
场景2中对于6架无人机不同算法性能对比"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 2 630 | 79.12 | 9.15 |
| 对比算法 | 2 587 | 113.91 | 16.02 |
表7
场景2中对于10架无人机不同算法性能对比"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 4 605 | 145.59 | 25.24 |
| 对比算法 | 4 520 | 206.16 | 41.42 |
表8
场景3高射炮参数设置"
| 威胁名称 | 最大威胁距离 | 最小威胁距离 | 高射炮位置 |
| 高射炮 | 60 | 20 | (50,80) |

图14
场景3中无人机集群航迹规划结果"
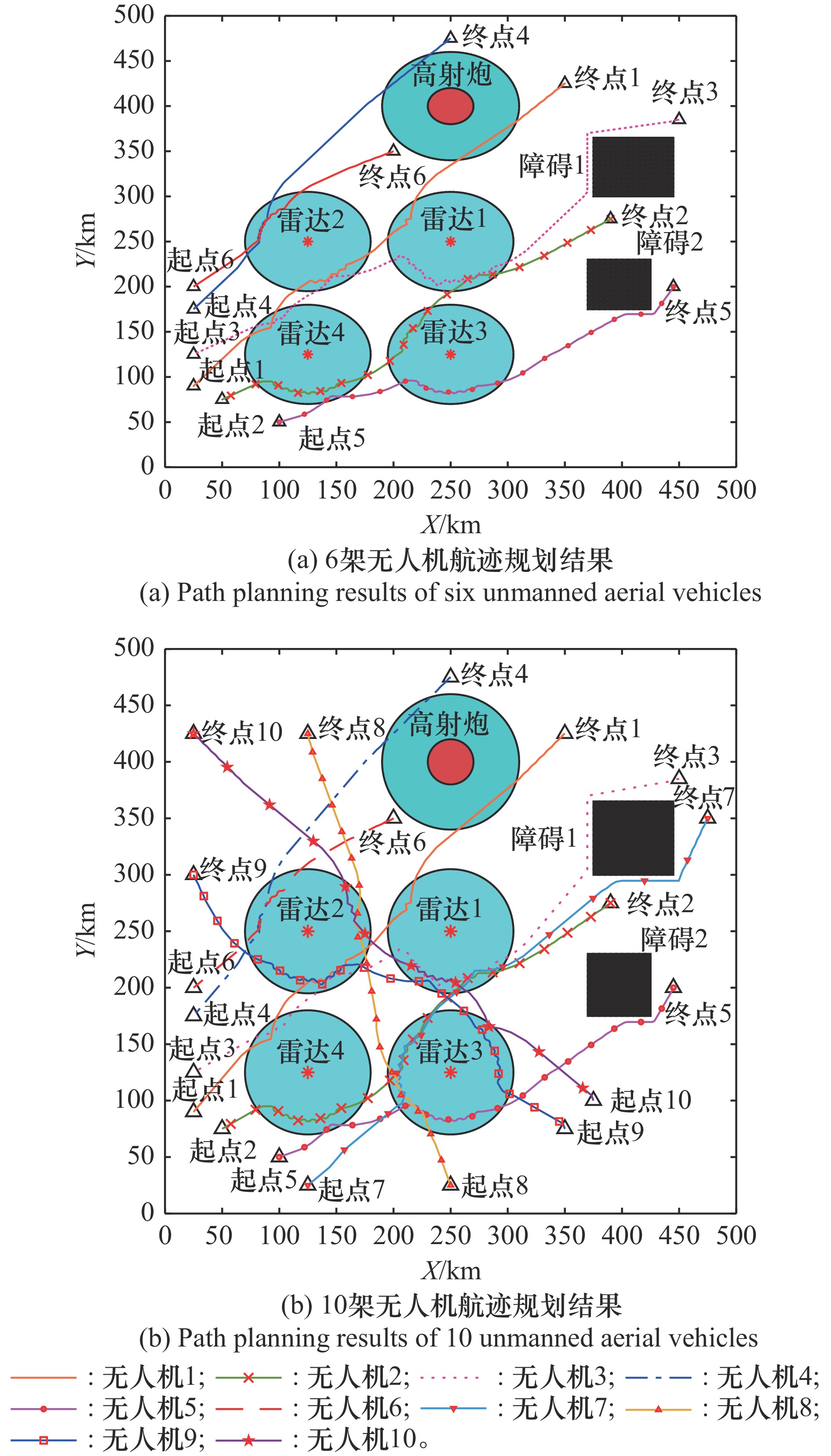

图15
场景3中6架无人机航向角变化"

图16
场景3中10架无人机航向角变化"

图17
场景3中组网雷达对无人机集群航迹探测概率变化"

图18
场景3中对比算法组网雷达对无人机集群航迹探测概率变化"
表9
场景3中对于6架无人机不同算法性能对比"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 2 620 | 73.91 | 9.7 |
| 对比算法 | 2 575 | 104.62 | 12.9 |
表10
场景3中对于10架无人机不同算法性能对比"
| 算法 | 航程/km | 综合代价 | 运行时间/s |
| 所提算法 | 4 595 | 134.73 | 17.90 |
| 对比算法 | 4 511 | 228.05 | 20.97 |
| 1 | 刘伯健, 李爱军, 郭永, 等. 带有输入受限的无人机精确编队合围容错控制[J]. 航空学报, 2023, 44 (9): 327414. |
| LIU B J, LI A J, GUO Y, et al. Fault-tolerant containment control for precise formation of UAVs with input saturation[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (9): 327414. | |
| 2 | GUPTA A, SRIVASTAVA S. Comparative analysis of ant colony and particle swarm optimization algorithms for distance optimization[J]. Procedia Computer Science, 2020, (173): 245- 253. |
| 3 | LU Y F, WU A P, CHEN Q Y, et. al. An improved UAV path planning method based on RRT-APF hybrid strategy[C]// Proc. of the 5th International Conference on Automation, Control and Robotics Engineering, 2020: 81−86. |
| 4 |
WANG Q, CHEN H, QIAO L, et al. Path planning for UAV/UGV collaborative systems in intelligent manufacturing[J]. IET Intelligent Transport Systems, 2020, 14 (11): 1475- 1483.
doi: 10.1049/iet-its.2019.0688 |
| 5 | JAYAWEERA H M, HANOUN S. A dynamic artificial potential field (D-APF) UAV path planning technique for following ground moving targets[J]. IEEE Access, 2020, (8): 192760- 192776. |
| 6 |
HONG D, LEE S, CHO Y H, et al. Energy-efficient online path planning of multiple drones using reinforcement learning[J]. IEEE Trans. on Vehicular Technology, 2021, 70 (10): 9725- 9740.
doi: 10.1109/TVT.2021.3102589 |
| 7 | CUI Z Y, WANG Y. UAV path planning based on multi-layer reinforcement learning technique[J]. IEEE Access, 2021, 9, 59486- 59497. |
| 8 |
JAMSHIDI V, NEKOUKAR V, REFANM H. Real time UAV path planning by parallel grey wolf optimization with align coefficient on CAN bus[J]. Cluster Computing, 2021, 24 (3): 2495- 2509.
doi: 10.1007/s10586-021-03276-6 |
| 9 | QI B K, LI M, YANG Y, et al. Research on UAV path planning obstacle avoidance algorithm based on improved artificial potential field method[J]. Journal of Physics: Conference Series, 2021, 1948, 012060. |
| 10 |
BAI H, FAN T, NIU Y, et al. Multi-UAV cooperative trajectory planning based on many-objective evolutionary algorithm[J]. Complex System Modeling and Simulation, 2022, 2 (2): 130- 141.
doi: 10.23919/CSMS.2022.0006 |
| 11 | PAN Z H, ZHANG C X, XIA Y Q, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems[J]. IEEE Trans. on Circuits and Systems,, 2022, 69 (3): 1129- 1133. |
| 12 | RAGAB M, ALTALBE A, ALGHAMDI A S M, et al. A drones optimal path planning based on swarm intelligence algorithms[J]. Computers, Materials & Continua, 2022, 72(1): 365−380. |
| 13 | YU X B, LUO W G. Reinforcement learning-based multi-strategy cuckoo search algorithm for 3D UAV path planning[J]. Expert Systems with Application, 2023, 223 (8): 119910. |
| 14 | ZHU R X, HOU T G, GUO Y X, et al. Improved multi-strategy salp swarm algorithm for UAV path planning[C]// Proc. of the IEEE International Conference on Unmanned Systems, 2023: 1601−1606. |
| 15 | ZHAO Z, NIU Y F, MA Z W, et al. A fast stealth trajectory planning algorithm for stealth UAV to fly in multi-radar network[C]// Proc. of the IEEE International Conference on Real-time Computing and Robotics, 2016: 549−554. |
| 16 | YANG R, MA Y, TAO Z Z, et al. A stealthy route planning algorithm for the fourth generation fighters[C]// Proc. of the International Conference on Mechanical, System and Control Engineering, 2017: 323−327. |
| 17 | CAO Y, LONG T, WANG Z, et al. Aircraft route planning for stealth penetration based on sparse A* search[C]// Proc. of the 29th Chinese Control and Decision Conference, 2017: 5380−5385. |
| 18 | BORGES N P, GHEDINI C G, RIBEIRO C H C. SUN-stealth UAV networks: a cooperative local model to mitigate UAVs exposure to threats[C]// Proc. of the IEEE International Conference on Systems, Man and Cybernetics, 2019: 4316−4323. |
| 19 |
ZHANG Z, WU J, DAI J Y, et al. A novel real-time penetration path planning algorithm for stealth UAV in 3D complex dynamic environment[J]. IEEE Access, 2020, 8, 122757- 122771.
doi: 10.1109/ACCESS.2020.3007496 |
| 20 | ORHAN E H. A path planning method for a low observable UAV in radar field[C]// Proc. of the International Conference on Unmanned Aircraft Systems, 2020: 41−47. |
| 21 | ZHANG Z T, TANG C R, LI Y B. Penetration path planning of stealthy UAV based on improved sparse A-star algorithm[C]// Proc. of the IEEE 3rd International Conference on Electronic Information and Communication Technology, 2020: 388−392. |
| 22 | ZHANG Z, WU J, DAI J Y, et al. Rapid penetration path planning method for stealth UAV in complex environment with BB threats[J]. International Journal of Aerospace Engineering, 2020, 2020 |
| 23 | WANG Y, LI M H, YANG J, et al. Research on stealth route planning based on improved RRT algorithm[C]// Proc. of the 5th International Conference on Mechanical, Control and Computer Engineering, 2020: 1491−1495. |
| 24 |
ZHANG Z, WU J, DAI J Y, et al. Optimal path planning with modified A-Star algorithm for stealth unmanned aerial vehicles in 3D network radar environment[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2022, 236 (1): 72- 81.
doi: 10.1177/09544100211007381 |
| 25 |
SAEED R A, MOHAMED O, ABDEL-KHALEK S. Optimal path planning for drones based on swarm intelligence Algorithm[J]. Neural Computing and Applications, 2022, 34, 10133- 10155.
doi: 10.1007/s00521-022-06998-9 |
| 26 | LI W K, LI C, HU J. Research on stealthy UAV path planning based on improved genetic algorithm[C]// Proc. of the International Conference on Artificial Intelligence and Computer Information Technology, 2022. |
| 27 | WANG Z Y, HUANG J, YI M X. A stealth–distance dynamic weight deep Q-Network algorithm for three-dimensional path planning of unmanned aerial helicopter[J]. Aerospace, 2023, 10 (8): 709. |
| 28 |
ZHANG Z, JIANG J, WU J, et al. Efficient and optimal penetration path planning for stealth unmanned aerial vehicle using minimal radar cross-section tactics and modified A-Star algorithm[J]. ISA Transactions, 2023, 134, 42- 57.
doi: 10.1016/j.isatra.2022.07.032 |
| 29 | 张哲, 吴剑, 代冀阳, 等. 基于改进A-Star算法的隐身无人机快速突防航路规划[J]. 航空学报, 2020, 41 (7): 323692. |
| ZHANG Z, WU J, DAI J Y, et al. Fast penetration path planning for stealth UAV based on improved A-Star algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (7): 323692. | |
| 30 |
刘鸿福, 周文宏, 陈少飞. 隐身飞机突防建模及低可探测性轨迹规划[J]. 火力与指挥控制, 2016, 41 (9): 36- 40,45.
doi: 10.3969/j.issn.1002-0640.2016.09.009 |
|
LIU H F, ZHOU W H, CHEN S F. Low observability trajectory planning for stealth aircraft penetrates netted radars[J]. Fire Control & Command Control, 2016, 41 (9): 36- 40,45.
doi: 10.3969/j.issn.1002-0640.2016.09.009 |
|
| 31 | 程振. 基于RCS与最短滞留时间的无人机协同航迹规划[D]. 南京: 南京航空航天大学, 2018. |
| CHENG Z. UAV cooperative path planning based on RCS and shortest residence time[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018. | |
| 32 | 葛超. 无人飞行器隐身突防航迹规划及飞行走廊构建方法研究[D]. 武汉: 华中科技大学, 2022. |
| GE C. Research on intelligent penetration path planning and flight corridor construction method of unmanned aerial vehicle[D]. Wuhan: Huazhong University of Science & Technology, 2022. | |
| 33 | 丁鹭飞, 耿富禄, 陈建春. 雷达原理[M]. 北京: 电子工业出版社, 2020. |
| DING L F, GENG F L, CHEN J C. Radar principle[M]. Beijing: Publishing House of Electronics Industry, 2020. |
| [1] | 耿泽, 黄炎焱, 张寒. 基于火炮转移路径预测的无人机集群反炮兵搜索路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1222-1234. |
| [2] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [3] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [4] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [5] | 殷雅萱, 张安, 毕文豪, 杨盼, 黄湛钧. 动态拓扑下四旋翼无人机集群蜂拥控制[J]. 系统工程与电子技术, 2024, 46(10): 3473-3483. |
| [6] | 刘兴宇, 蒋志彪, 蒋天瑞, 郭荣化, 常远, 闫超, 周晗. 基于通信功率自适应的无人机集群协同导航控制方法[J]. 系统工程与电子技术, 2024, 46(10): 3536-3546. |
| [7] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [8] | 齐小刚, 周雨桐, 刘立芳. 无人机集群对地作战任务可靠性评估[J]. 系统工程与电子技术, 2023, 45(9): 2971-2978. |
| [9] | 张书衡, 翟茹萍, 刘永凯. 基于通信域和雷达域融合特征的无人机集群类型识别算法[J]. 系统工程与电子技术, 2023, 45(12): 3734-3742. |
| [10] | 罗瑞宁, 黄树彩, 赵岩, 张振. 子母导弹反无人机集群制导策略[J]. 系统工程与电子技术, 2023, 45(10): 3249-3258. |
| [11] | 翟茹萍, 张书衡, 平嘉蓉. 复杂多径环境下的无人机集群通信波形识别[J]. 系统工程与电子技术, 2023, 45(10): 3312-3320. |
| [12] | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44(3): 967-976. |
| [13] | 杨兴家, 段克清, 李想, 祁炜. 无人机集群协同探测距离解模糊方法[J]. 系统工程与电子技术, 2022, 44(2): 480-489. |
| [14] | 符小卫, 潘静. 无人机集群规避动态障碍物的分布式队形控制[J]. 系统工程与电子技术, 2022, 44(2): 529-537. |
| [15] | 管灵, 朱晨曦, 董纯柱, 殷红成. 基于模式/区域分解的无人机集群电磁特性快速分析[J]. 系统工程与电子技术, 2021, 43(10): 2697-2705. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||