
系统工程与电子技术 ›› 2023, Vol. 45 ›› Issue (3): 848-858.doi: 10.12305/j.issn.1001-506X.2023.03.27
张毅, 于浩, 杨秀霞, 姜子劼
收稿日期:2021-12-23
出版日期:2023-02-25
发布日期:2023-03-09
通讯作者:
于浩
作者简介:张毅(1971—), 男, 教授, 博士, 主要研究方向为飞行器制导与控制基金资助:Yi ZHANG, Hao YU, Xiuxia YANG, Zijie JIANG
Received:2021-12-23
Online:2023-02-25
Published:2023-03-09
Contact:
Hao YU
摘要:
针对具有Lipschitz非线性动力学特性的无人机(unmanned aerial vehicle, UAV)集群系统的分组编队跟踪控制问题, 提出了一种基于一致性理论的分组编队协同控制方法。首先, 建立分层双虚拟结构的协同控制框架, 将多编队生成、保持以及组内组间协同变换等复杂编队任务作为控制目标, 基于参数组的队形描述方法, 在分层控制框架内分别设置轨迹导引UAV和基准UAV, 并利用UAV之间的局部运动信息设计编队控制律, 克服了采用现有多编队控制策略编队间难以协同的缺陷; 其次, 设计多编队控制和目标跟踪一体化控制策略, 确保在多编队进行协同变换的同时实现对机动目标的精确协同跟踪; 最后, 仿真结果验证了所提的控制算法能够实现分组编队的跟踪控制。
中图分类号:
张毅, 于浩, 杨秀霞, 姜子劼. 无人机集群分组编队控制跟踪一体化设计[J]. 系统工程与电子技术, 2023, 45(3): 848-858.
Yi ZHANG, Hao YU, Xiuxia YANG, Zijie JIANG. Integrated design of group formation control and tracking of UAV swarm[J]. Systems Engineering and Electronics, 2023, 45(3): 848-858.
图1
UAV集群控制架构"
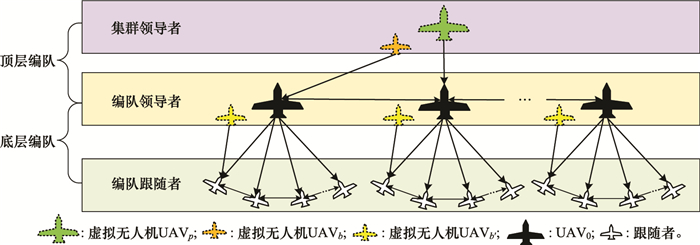
图2
编队队形描述示意图"
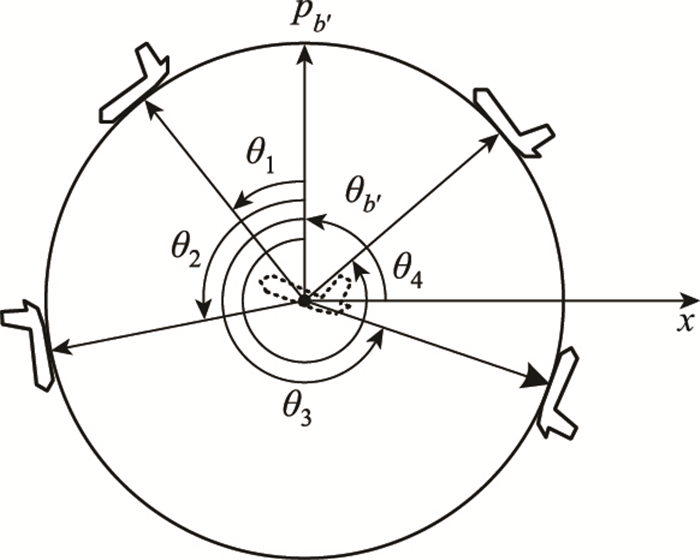

图3
多编队协同示意图"
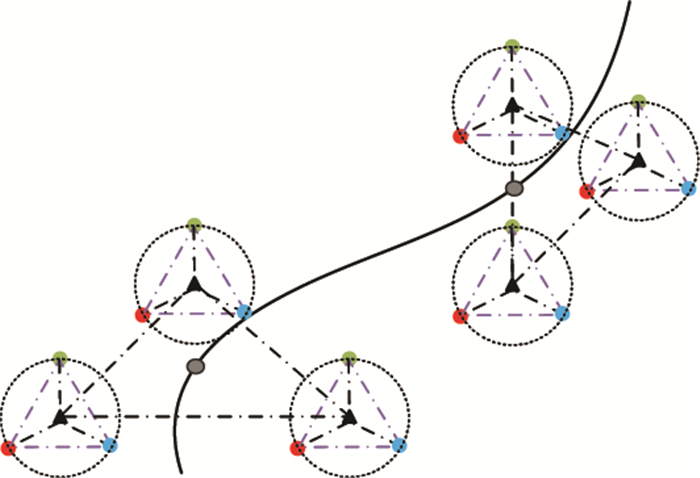

图4
多分组编队切换为菱形编队"
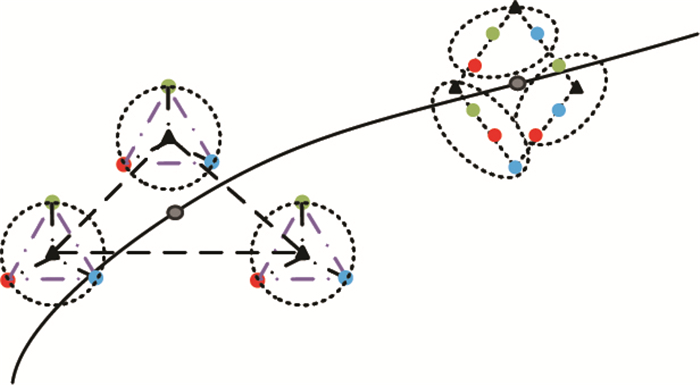
图5
顶层编队跟踪目标轨迹"
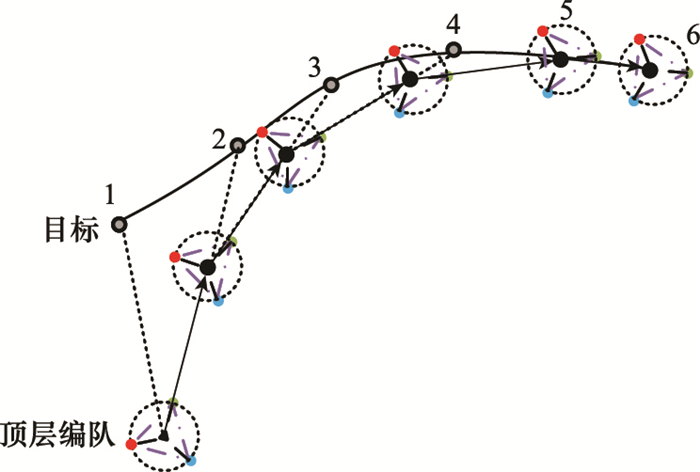
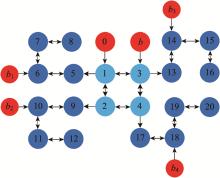
图6
集群通信拓扑结构"
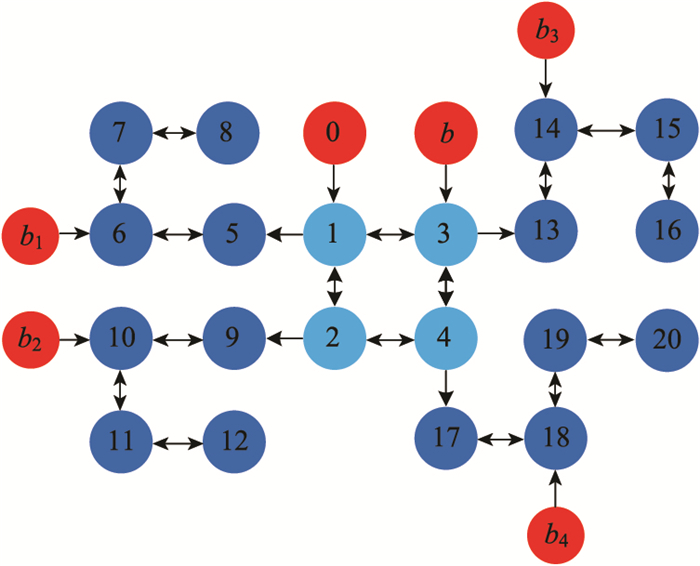
表1
集群队形参数"
| t/s | ri | θ′i |
| [0, 10) | 40, 40, 40, 40 | |
| [10, 20) | 35, 30, 35, 30 | |
| [20, 30) |
表2
编队队形参数"
| t/s | ri | θ1 | θ2 | θ3 | θ4 |
| [0, 10) | 16, 16, 16, 16 | ||||
| [10, 20) | 15, 15, 15, 15 | ||||
| [20, 30) | 15, 25, 15, 25 |
表3
速度和加速度约束"
| 方向 | (vmin, vmax) | (amin, amax) |
| x | (-13.9, 13.9) | (-15, 15) |
| y | (-13.9, 13.9) | (-15, 15) |
| z | (-8, 9) | (-8.4, 9) |
表4
编队领导者的初始条件"
| 编号 | xi(0)/m | vi(0)/(m/s) |
| 领导者1 | (35, 30, 0) | (4, -2, 5) |
| 领导者2 | (-30, 35, 0) | (3, 5, 5) |
| 领导者3 | (-32, -30, 0) | (4, -3, 2) |
| 领导者4 | (30, -32, 0) | (5, 4, 2) |
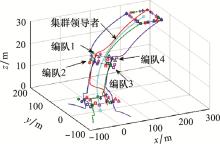
图7
不同时刻(9 s、19 s、29 s)的集群运动轨迹"
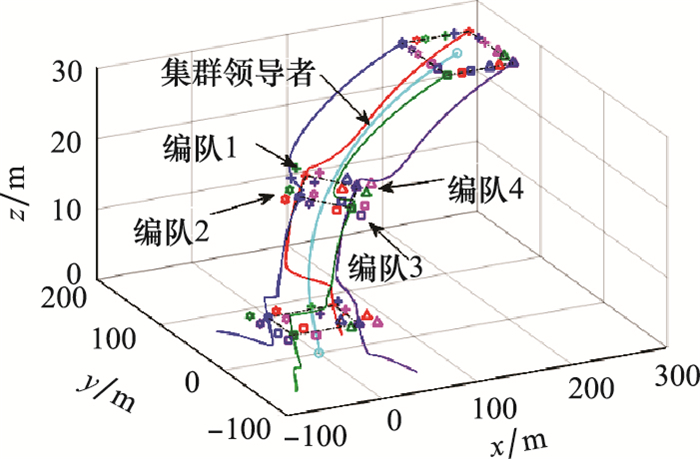

图8
顶层编队位置误差"


图9
顶层编队速度误差"
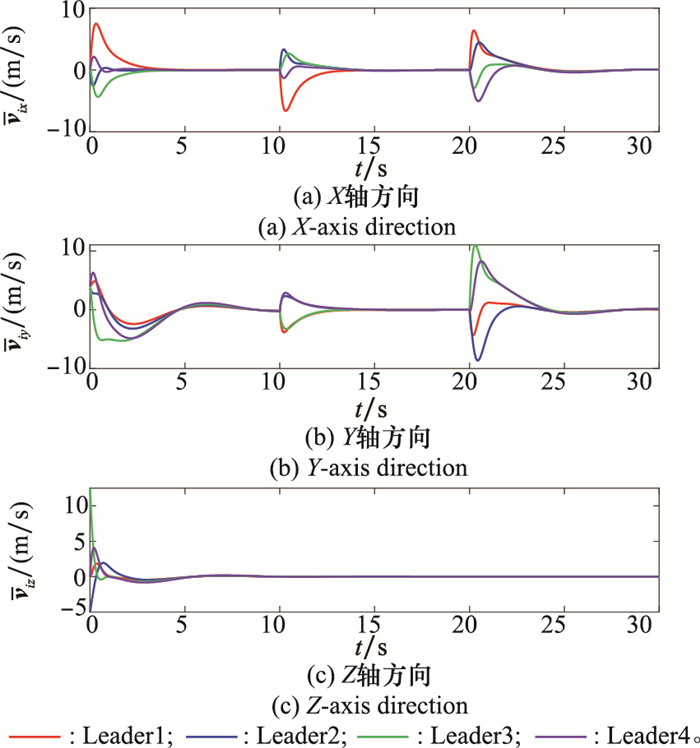

图10
底层编队位置误差"
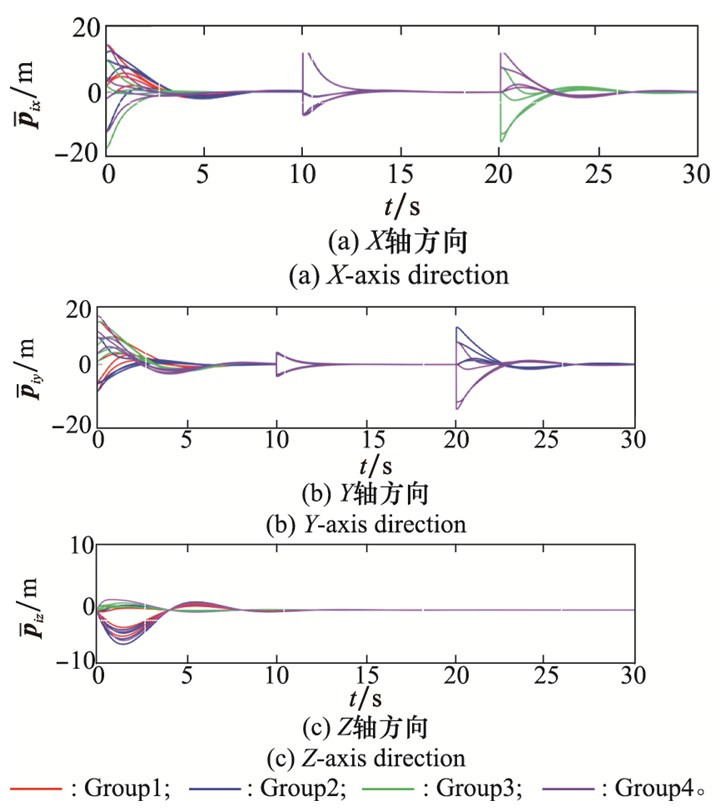

图11
底层编队速度误差"
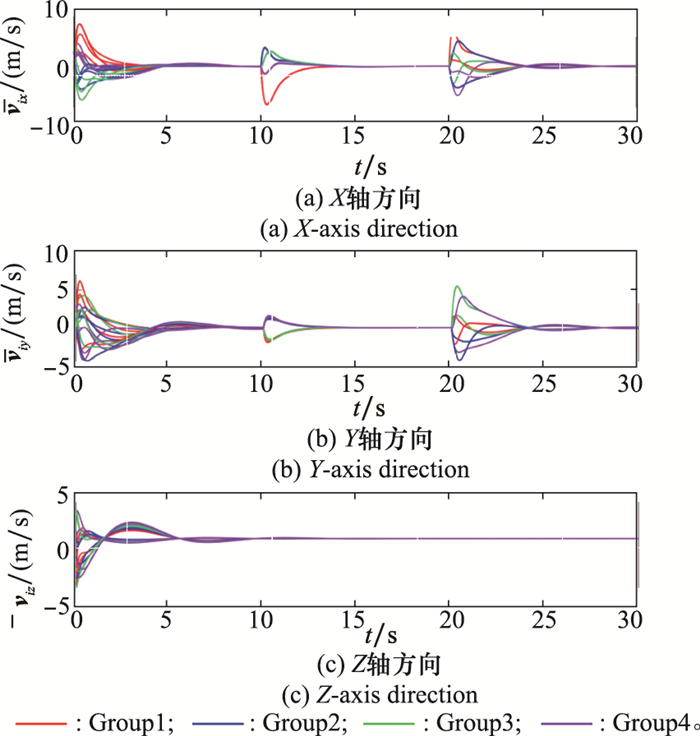
表5
文献[22]仿真初始条件"
| 编号 | vi(0)/(m/s) | xi(0)/m | 编号 | vi(0)/(m/s) | xi(0)/m | |
| UAV1 | (0, -1.5) | (1, 3) | UAV7 | (0, -1.5) | (6, 9) | |
| UAV2 | (-1.5, 0) | (5, 6) | UAV8 | (-1.5, 0) | (5, 10) | |
| UAV3 | (1.0, -1.0) | (4, 8) | UAV9 | (1.0, -1.0) | (12, 15) | |
| UAV4 | (0, -1.5) | (7, 9) | UAV10 | (0, -1.5) | (14, 17) | |
| UAV5 | (-1.5, 0) | (11, 12) | UAV11 | (-1.5, 0) | (15, 10) | |
| UAV6 | (1.0, -1.0) | (8, 10) | UAV12 | (1.0, -1.0) | (20, 15) |

图12
文献[22]方法仿真结果"
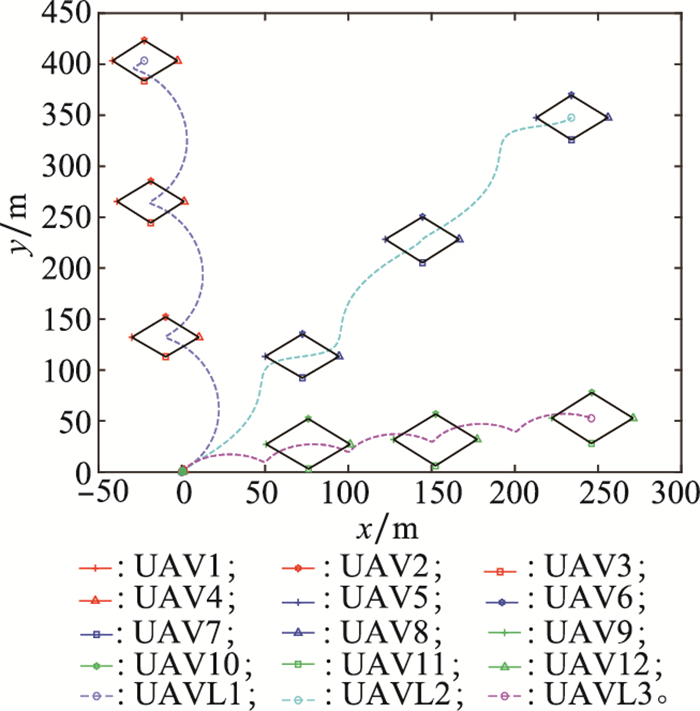
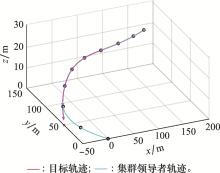
图13
集群领导者跟踪目标的虚拟轨迹"

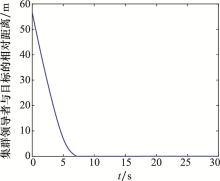
图14
集群领导者与目标的相对距离"
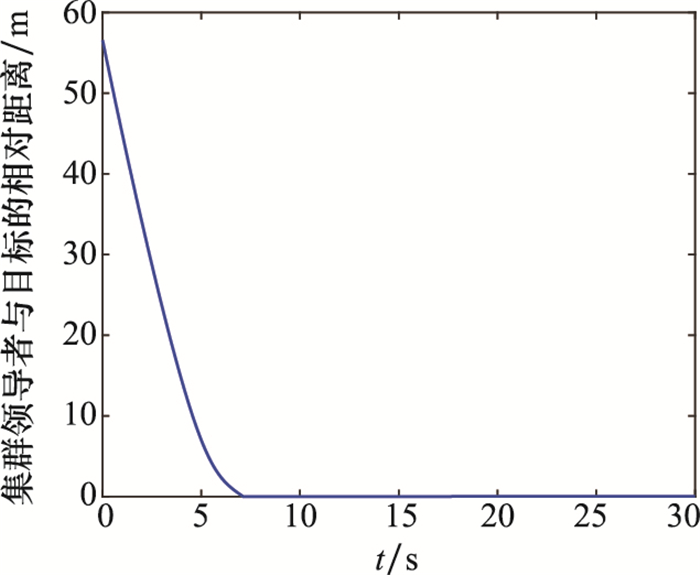
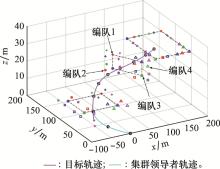
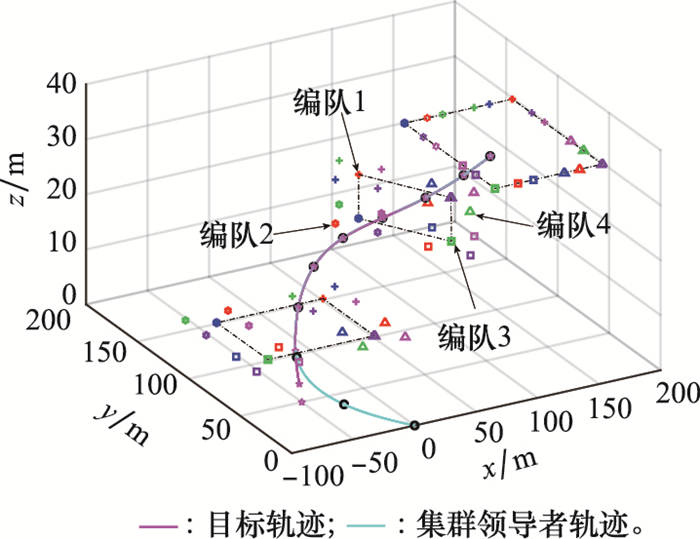
图15
集群目标跟踪轨迹"
| 1 | 黄长强. 无人作战飞机自主攻击技术[M]. 北京: 国防工业出版社, 2014. |
| HUANG C Q . Autonomous attack technology for UCAV[M]. Beijing: National Defense Industry Press, 2014. | |
| 2 | 韩亮, 任章, 董希旺. 多无人机协同控制方法及应用研究[J]. 导航定位与授时, 2018, 5 (4): 1- 7. |
| HAN L , REN Z , DONG X W . Research on cooperative control method and application for multiple unmanned aerial vehicles[J]. Navigation Positioning and Timing, 2018, 5 (4): 1- 7. | |
| 3 |
HE S M , WANG J , LIN D F . Unknown ground moving target tracking using multiple unmanned aerial vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233 (3): 1021- 1032.
doi: 10.1177/0954410017744812 |
| 4 |
XU Z F , WEI R X , ZHAO X L , et al. Coordinated standoff target tracking guidance method for UAVs[J]. IEEE Access, 2018, 6, 59853- 59859.
doi: 10.1109/ACCESS.2018.2875787 |
| 5 | DEHGHANI M A , MENHAJ M B . Communication free leader-follower formation control of unmanned aircraft systems[J]. Robotics and Autonomous Systems, 2016, 80 (1): 69- 75. |
| 6 | PAN Y J , WERNER H , HUANG Z , et al. Distributed coope-rative control of leader-follower multi-agent systems under packet dropouts for quadcopters[J]. Systems & Control Letters, 2017, 106 (1): 47- 57. |
| 7 | 邵壮, 祝小平, 周洲, 等. 无人机编队机动飞行时的队形保持反馈控制[J]. 西北工业大学学报, 2015, 33 (1): 26- 32. |
| SHAO Z , ZHU X P , ZHOU Z , et al. A formation keeping feedback control for formationflight of UAVs[J]. Journal of Northwestern Polytechnical University, 2015, 33 (1): 26- 32. | |
| 8 | 邵壮, 祝小平, 周洲, 等. 三维动态环境下多无人机编队分布式保持控制[J]. 控制与决策, 2016, 31 (6): 1065- 1072. |
| SHAO Z , ZHU X P , ZHOU Z , et al. Distributed formationkeeping control of UAVs in 3-D dynamic environment[J]. Control and Decision, 2016, 31 (6): 1065- 1072. | |
| 9 | 邱华鑫, 段海滨, 范彦铭. 基于鸽群行为机制的多无人机自主编队[J]. 控制理论与应用, 2015, 32 (10): 1298- 1304. |
| QIU H X , DUAN H B , FAN Y M . Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J]. Control Theory and Applications, 2015, 32 (10): 1298- 1304. | |
| 10 | HUO M Z , DUAN H B , DING X L . Manned aircraft and unmanned aerial vehicle heterogeneous formation flight control via heterogeneous pigeon flock consistency[J]. Unmanned Systems, 2021, 9 (3): 227- 236. |
| 11 | MOSTAFA S , MOHAMED , DUAN H B . Flight control system design using adaptive pigeon-inspired optimization[J]. International Journal of Bio-Inspired Computation, 2020, 16 (3): 133- 147. |
| 12 | XUE R B , SONG J M , CAI G H . Distributed formation flight control of multi-UAV system with nonuniform time-delays and jointly connected topologies[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2016, 230 (10): 1871- 1881. |
| 13 | COPP D A , VAMVOUDAKIS K G , HESPANHA J P . Distributed output-feedback model predictive control for multi-agent consensus[J]. Systems & Control Letters, 2019, 127 (1): 52- 59. |
| 14 | REN W . Consensus strategies for cooperative control of vehicle formations[J]. IET Control Theory and Applications, 2007, 1 (2): 505- 512. |
| 15 | KANG Y H , KUANG Y , CHENG J , et al. Robust leaderless time-varying formation control for unmanned aerial vehicle swarm system with Lipschitz nonlinear dynamics and directed switching topologies[J]. Chinese Journal of Aeronautics, 2022, 35 (1): 124- 136. |
| 16 | DONG X W , LI Y F , LU C , et al. Time-varying formation tracking for UAV swarm systems with switching directed topologies[J]. IEEE Trans. on Neural Networks & Learning Systems, 2018, 30 (12): 3674- 3685. |
| 17 | DONG X W , HUA Y Z , ZHOU Y , et al. Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems[J]. IEEE Trans. on Automation Science and Engineering, 2019, 16 (1): 229- 240. |
| 18 | HAN L , XIE Y X , LI X D , et al. Time-varying group formation tracking control for second-order multi-agent systems with communication delays and multiple leaders[J]. Journal of the Franklin Institute, 2020, 357 (14): 9761- 9780. |
| 19 | 符小卫, 潘静. 无人机集群规避动态障碍物的分布式队形控制[J]. 系统工程与电子技术, 2022, 44 (2): 529- 537. |
| FU X W , PAN J . Distributed formation control of UAV swarmwith dynamic obstacle avoidance[J]. Systems Engineering and Electronics, 2022, 44 (2): 529- 537. | |
| 20 | LIU C L , TIAN Y P . Formation control of multi-agent systems with heterogeneous communication delays[J]. International Journal of Systems Science, 2009, 40 (6): 627- 636. |
| 21 | DONG X W , LI Q , ZHAO Q , et al. Time-varying group formation analysis and design for general linear multi-agent systems with directed topologies[J]. International Journal of Robust and Nonlinear Control, 2017, 27 (9): 1640- 1652. |
| 22 | HAN T , GUAN Z H , CHI M , et al. Multi-formation control of nonlinear leader-following multi-agent systems[J]. ISA Transactions, 2017, 69 (1): 140- 147. |
| 23 | 田磊, 赵启伦, 董希旺, 等. 异构多智能体系统分组输出时变编队跟踪控制[J]. 航空学报, 2020, 41 (7): 301- 312. |
| TIAN L , ZHAO Q L , DONG X W , et al. Time-varying output group formation tracking for heterogeneous multi-agent systems[J]. Acta Aeronauticaet Astronautica Sinica, 2020, 41 (7): 301- 312. | |
| 24 | 田磊, 王蒙一, 赵启伦, 等. 拓扑切换的集群系统分布式分组时变编队跟踪控制[J]. 中国科学: 信息科学, 2020, 50 (3): 408- 423. |
| TIAN L , WANG M Y , ZHAO Q L , et al. Distributed time-varying group formation tracking for cluster systemsunder switching topologies[J]. Scientia Sinica Informationis, 2020, 50 (3): 408- 423. | |
| 25 | CHEN H , WANG X K , SHEN L C , et al. Formation flight of fixed-wing UAV swarms: a group-based hierarchical approach[J]. Chinese Journalof Aeronautics, 2021, 34 (2): 504- 515. |
| 26 | 王祥科, 陈浩, 赵述龙. 大规模固定翼无人机集群编队控制方法[J]. 控制与决策, 2021, 36 (9): 2063- 2073. |
| WANG X K , CHEN H , ZHAO S L . Formation control of large-scale fixed-wing unmanned aerial vehicle swarms[J]. Control and Decision, 2021, 36 (9): 2063- 2073. | |
| 27 | 廖晓昕, 胥布工. 判定矩阵稳定、正定以及为M矩阵的统一简化条件[J]. 控制理论与应用, 1999, 16 (2): 301- 305. |
| LIAO X X , XU B G . A unified simple condition for stable matrix, positive definite matrix and M matrix[J]. Control Theory and Applications, 1999, 16 (2): 301- 305. | |
| 28 | MENG Z Y , LIN Z L , REN W . Robust cooperative tracking for multiple non-identical second-order nonlinear systems[J]. Automatica, 2013, 49 (8): 2363- 2372. |
| 29 | HORN R , JOHNSON C . Matrix analysis[M]. Cambridge: Cambridge University Press, 1985. |
| 30 | ROJO E G, VAZQUEZ E J, RODRIGUEZ J, et al. Implementation of a super twisting controller for distributed formation flight of multi-agent systems based on consensus algorithms[C]//Proc. of the International Conference on Unmanned Aircraft Systems, 2017: 1101-1107. |
| [1] | 张昀普, 单甘霖, 黄燕, 付强. 考虑盲区的多移动传感器地面目标检测跟踪调度方法[J]. 系统工程与电子技术, 2023, 45(2): 453-464. |
| [2] | 安雷, 李召瑞, 吉兵. 杂波环境下可移动主被动传感器长时调度方法[J]. 系统工程与电子技术, 2023, 45(1): 165-174. |
| [3] | 仇祝令, 查宇飞, 李振宇, 李禹铭, 张鹏, 朱川. 基于多模型蒸馏的时间正则化相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(8): 2448-2456. |
| [4] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| [5] | 史浩然, 卢发兴, 祁江鑫, 杨光. 基于辅助信标的无人机协同目标跟踪[J]. 系统工程与电子技术, 2022, 44(7): 2302-2310. |
| [6] | 金国栋, 薛远亮, 谭力宁, 许剑锟. 基于孪生神经网络的目标跟踪算法进展研究[J]. 系统工程与电子技术, 2022, 44(6): 1805-1822. |
| [7] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [8] | 王帅, 向建军, 彭芳, 唐书娟. 基于新最速下降法的目标跟踪算法[J]. 系统工程与电子技术, 2022, 44(5): 1512-1519. |
| [9] | 辛怀声, 曹晨. 基于交互多模型的分组δ-广义标签多伯努利算法[J]. 系统工程与电子技术, 2022, 44(4): 1128-1138. |
| [10] | 谢家豪, 黄树彩, 韦道知, 张曌宇, 王文豪. 基于PEV准则的不确定混合多传感器联盟求解[J]. 系统工程与电子技术, 2022, 44(3): 819-826. |
| [11] | 宋子壮, 杨嘉伟, 张东方, 王诗强, 张硕. 基于无锚框的红外多类别多目标实时跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 401-409. |
| [12] | 姚云翔, 陈莹. 注意力机制下双模态交互融合的目标跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 410-419. |
| [13] | 辛怀声, 宋鹏汉, 曹晨. 多模型广义标签多伯努利滤波器[J]. 系统工程与电子技术, 2022, 44(12): 3603-3613. |
| [14] | 刘浩楠, 宋骊平. 基于核Fisher判别的群结构更新模型及群目标跟踪算法[J]. 系统工程与电子技术, 2022, 44(10): 3012-3019. |
| [15] | 方澄, 路稳, 姬菁颖, 宋玉蒙, 梁斐菲, 罗志伟. 基于外观相似性更新的相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(1): 117-126. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||